
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (2): 556-565.doi: 10.12382/bgxb.2022.0110
Previous Articles Next Articles
WAN Xinwei, WANG Jing*( ), YANG Hui, LI Yi, ZHANG Yuanzai, WANG Lu
), YANG Hui, LI Yi, ZHANG Yuanzai, WANG Lu
Received:2022-01-20
Online:2022-07-30
Contact:
WANG Jing
CLC Number:
WAN Xinwei, WANG Jing, YANG Hui, LI Yi, ZHANG Yuanzai, WANG Lu. A Random Error Compensation Method of MEMS Gyroscope Based on BP Neural Network Combined with PSO-Optimized Kalman Filter[J]. Acta Armamentarii, 2023, 44(2): 556-565.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Diagram of BP neural network structure

Fig.2 Principle of the filtering method
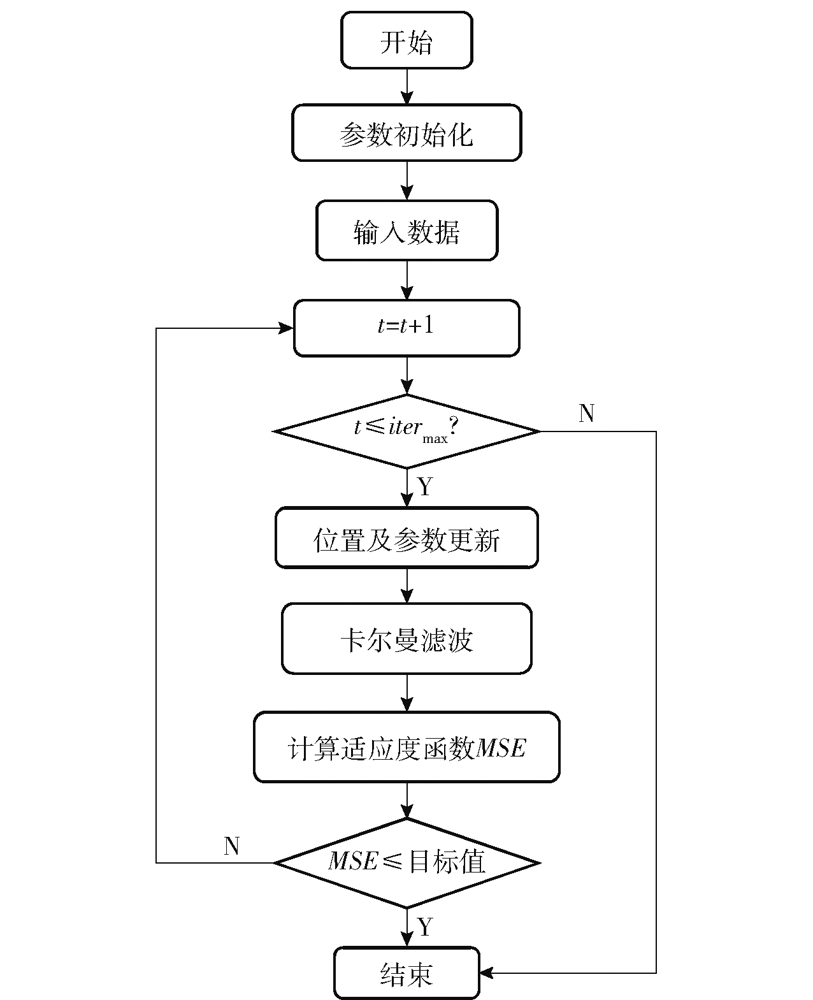
Fig.3 Flow chart of optimization of Kalman filter parameters by the QPSO algorithm

Fig.4 Experiment site
| 隐含层节点数 | 网络学习MSE |
|---|---|
| 2 | 0.02438 |
| 4 | 0.01924 |
| 6 | 0.01015 |
| 8 | 0.00198 |
| 10 | 0.00178 |
| 20 | 0.00175 |
| 40 | 0.00175 |
| 60 | 0.00174 |
Table 1 Number of hidden layer nodes and mean square error of network learning
| 隐含层节点数 | 网络学习MSE |
|---|---|
| 2 | 0.02438 |
| 4 | 0.01924 |
| 6 | 0.01015 |
| 8 | 0.00198 |
| 10 | 0.00178 |
| 20 | 0.00175 |
| 40 | 0.00175 |
| 60 | 0.00174 |
| 转速/((°)·s-1) | Q | R | MSE |
|---|---|---|---|
| 1.5 | 0.0015 | 6.3651 | 4.9634×10-7 |
| -1.5 | 0.0024 | 5.7802 | 4.859×10-7 |
| 3 | 0.001 | 6.7147 | 2.8848×10-8 |
| -3 | 0.00201 | 5.3647 | 1.1947×10-7 |
| 6 | 0.0018 | 5.3162 | 2.8958×10-6 |
| -6 | 0.0012 | 6.1819 | 3.6192×10-6 |
Table 2 Optimized Kalman filtering parametersby QPSO
| 转速/((°)·s-1) | Q | R | MSE |
|---|---|---|---|
| 1.5 | 0.0015 | 6.3651 | 4.9634×10-7 |
| -1.5 | 0.0024 | 5.7802 | 4.859×10-7 |
| 3 | 0.001 | 6.7147 | 2.8848×10-8 |
| -3 | 0.00201 | 5.3647 | 1.1947×10-7 |
| 6 | 0.0018 | 5.3162 | 2.8958×10-6 |
| -6 | 0.0012 | 6.1819 | 3.6192×10-6 |
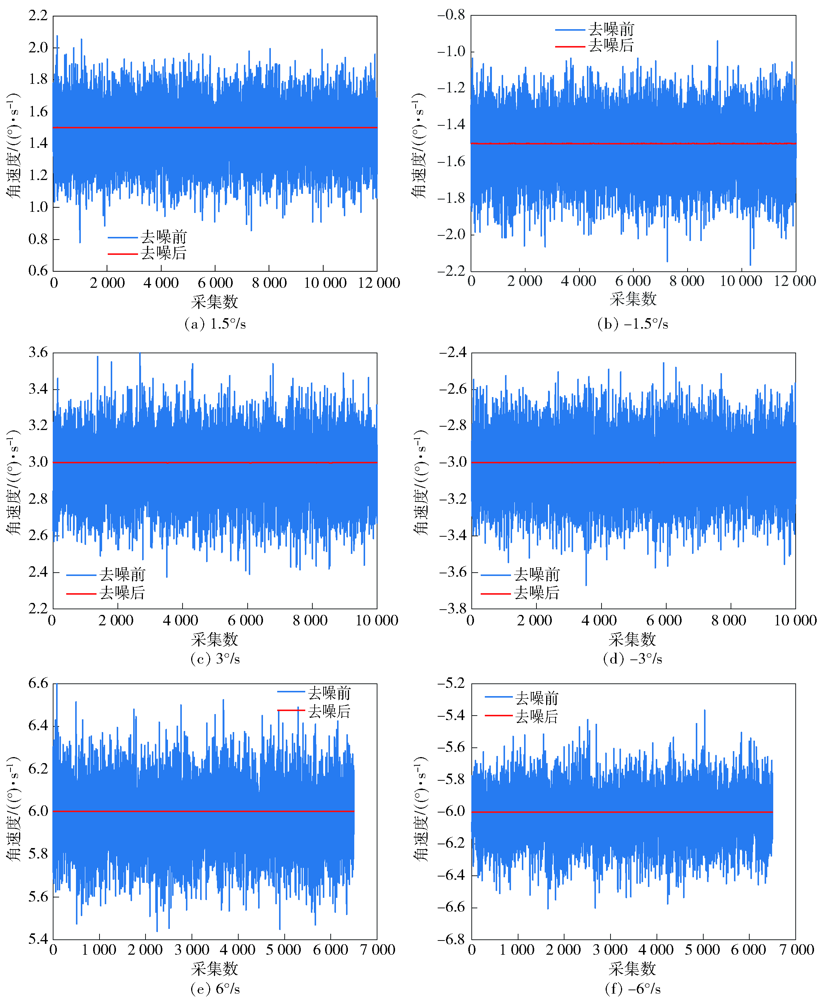
Fig.5 Denoising effect under different angular rates

Fig.6 Different methods of denoising at different angular rates
| 角速度/((°)·s-1) | 评价指标 | 原始数据 | 本文方法 | BP-KF | QPSO-KF | VMD-WTD |
|---|---|---|---|---|---|---|
| 1.5 | MAE | 0.1336 | 6.98×10-4 | 4.64×10-2 | 3.98×10-2 | 4.34×10-2 |
| MSE | 2.80×10-2 | 4.96×10-7 | 3.20×10-3 | 1.90×10-3 | 2.70×10-3 | |
| -1.5 | MAE | 0.1263 | 6.87×10-4 | 4.01×10-2 | 3.35×10-2 | 3.69×10-2 |
| MSE | 2.48×10-2 | 4.86×10-7 | 2.50×10-3 | 1.60×10-3 | 2.00×10-3 | |
| 3 | MAE | 0.1327 | 1.20×10-4 | 4.59×10-2 | 4.00×10-2 | 4.32×10-2 |
| MSE | 2.75×10-2 | 2.89×10-8 | 3.10×10-3 | 1.90×10-3 | 2.60×10-3 | |
| -3 | MAE | 0.1292 | 3.30×10-4 | 3.52×10-2 | 2.57×10-2 | 3.12×10-2 |
| MSE | 2.59×10-2 | 1.19×10-7 | 1.90×10-3 | 9.55×10-4 | 1.50×10-3 | |
| 6 | MAE | 0.1265 | 1.70×10-3 | 3.90×10-2 | 3.10×10-2 | 3.57×10-2 |
| MSE | 2.51×10-2 | 2.90×10-6 | 2.30×10-3 | 1.30×10-3 | 1.90×10-3 | |
| -6 | MAE | 0.1283 | 1.90×10-3 | 3.91×10-2 | 2.98×10-2 | 3.57×10-2 |
| MSE | 2.59×10-2 | 3.62×10-6 | 2.30×10-3 | 1.30×10-3 | 1.90×10-3 |
Table 3 Comparison of MAE and MSE results by different methods
| 角速度/((°)·s-1) | 评价指标 | 原始数据 | 本文方法 | BP-KF | QPSO-KF | VMD-WTD |
|---|---|---|---|---|---|---|
| 1.5 | MAE | 0.1336 | 6.98×10-4 | 4.64×10-2 | 3.98×10-2 | 4.34×10-2 |
| MSE | 2.80×10-2 | 4.96×10-7 | 3.20×10-3 | 1.90×10-3 | 2.70×10-3 | |
| -1.5 | MAE | 0.1263 | 6.87×10-4 | 4.01×10-2 | 3.35×10-2 | 3.69×10-2 |
| MSE | 2.48×10-2 | 4.86×10-7 | 2.50×10-3 | 1.60×10-3 | 2.00×10-3 | |
| 3 | MAE | 0.1327 | 1.20×10-4 | 4.59×10-2 | 4.00×10-2 | 4.32×10-2 |
| MSE | 2.75×10-2 | 2.89×10-8 | 3.10×10-3 | 1.90×10-3 | 2.60×10-3 | |
| -3 | MAE | 0.1292 | 3.30×10-4 | 3.52×10-2 | 2.57×10-2 | 3.12×10-2 |
| MSE | 2.59×10-2 | 1.19×10-7 | 1.90×10-3 | 9.55×10-4 | 1.50×10-3 | |
| 6 | MAE | 0.1265 | 1.70×10-3 | 3.90×10-2 | 3.10×10-2 | 3.57×10-2 |
| MSE | 2.51×10-2 | 2.90×10-6 | 2.30×10-3 | 1.30×10-3 | 1.90×10-3 | |
| -6 | MAE | 0.1283 | 1.90×10-3 | 3.91×10-2 | 2.98×10-2 | 3.57×10-2 |
| MSE | 2.59×10-2 | 3.62×10-6 | 2.30×10-3 | 1.30×10-3 | 1.90×10-3 |

Fig.7 Comparison of flexible gyro and MEMS gyro at different angular rates
| [1] |
邱林茂, 高文冀, 李磊, 等. 导引头中MEMS陀螺漂移补偿算法研究[J]. 火控雷达技术, 2013, 42(2):10-14.
|
|
|
|
| [2] |
熊必凤. 低成本MEMS陀螺仪随机漂移误差的建模及修正[D]. 重庆: 西南大学, 2017.
|
|
|
|
| [3] |
刘孝博, 陈光武, 王迪, 等. MEMS陀螺仪漂移和噪声的分析和补偿[J]. 传感技术学报, 2018, 31(3):368-373.
|
|
|
|
| [4] |
刘文超, 郑小兵, 王荣颖, 等. 基于角速度估计的MEMS陀螺随机误差动态滤波方法[J]. 电光与控制, 2021, 28(5):79-84.
|
|
|
|
| [5] |
段志强, 刘洁瑜, 汪立新, 等. BPNN辅助KF的MEMS陀螺仪数据处理方法[J]. 压电与声光, 2020, 42(2):284-288.
|
|
|
|
| [6] |
程章, 许江宁, 许微, 等. 基于神经网络的MEMS陀螺标定与补偿[J]. 压电与声光, 2018, 40(1):111-114.
|
|
|
|
| [7] |
doi: 10.3390/s120709448 pmid: 23012552 |
| [8] |
|
| [9] |
doi: 10.1088/1361-6501/abfe33 |
| [10] |
刘宇, 付乐乐, 邹新海, 等. 基于RBF神经网络的MEMS惯性传感器误差补偿方法[J]. 重庆理工大学学报(自然科学), 2021, 35(1):197-202.
|
|
|
|
| [11] |
孙伟, 段顺利, 文剑, 等. 阈值去噪与RBF神经网络在MEMS陀螺仪误差补偿中的应用[J]. 传感技术学报, 2017, 30(1):115-119.
|
|
|
|
| [12] |
郭宏伟, 侯宏录, 李光耀. 基于Kalman滤波和神经网络的MEMS陀螺温度漂移补偿[J]. 自动化与仪表, 2020, 35(1):1-4,9.
|
|
|
|
| [13] |
禹忠, 黄一超, 郭畅. 卡尔曼滤波结合神经网络在MEMS传感器上的应用[J]. 传感器与微系统, 2021, 40(11):154-156,160.
|
|
|
|
| [14] |
doi: 10.3390/s21041181 URL |
| [15] |
孙俊. 量子行为粒子群优化算法研究[D]. 无锡: 江南大学, 2009.
|
|
|
|
| [16] |
陈一鸣. 基于卡尔曼滤波的陀螺仪随机误差分析[J]. 电子测量技术, 2020, 43(17):97-100.
|
|
|
|
| [17] |
周克良, 王威, 郭春燕. 基于NAR-KF的心音信号仿真研究[J]. 现代电子技术, 2021, 44(21):35-38.
|
|
|
|
| [18] |
张敏, 李凯, 韩焱, 等. 基于卡尔曼滤波的陀螺仪降噪处理[J]. 传感技术学报, 2018, 31(2):223-227.
|
|
|
|
| [19] |
谷鹏, 王大龙, 张世仓. 基于粒子群优化的扩展卡尔曼滤波方法研究[J]. 工业控制计算机, 2019, 32(11):80-82.
|
|
|
|
| [20] |
杨辉, 杨川, 姜湖海, 等. 基于改进极限学习机的MEMS陀螺随机误差补偿方法研究[J]. 传感技术学报, 2021, 34(2):244-248.
|
|
|
|
| [21] |
doi: 10.2478/msr-2021-0003 URL |
| [22] |
吴保锋, 夏林元, 吴东金, 等. MEMS陀螺仪随机误差分析与小波阈值去噪研究[J]. 电子设计工程, 2020, 28(15):1-5.
|
|
|
|
| [23] |
李世银, 张楠, 武中文, 等. 基于小波分析的MEMS加速度计去噪优化算法[J]. 传感技术学报, 2018, 31(5):705-709.
|
|
|
| [1] | SHEN Cheng, ZHANG Lianchao, ZHANG Zhuo, ZHU Wenliang, CHEN Yukang. Fire Control Correction and Line-of-sight Filtering Prediction of Lightweight Ballistic Calculation System [J]. Acta Armamentarii, 2024, 45(2): 429-442. |
| [2] | DENG Tingxiang, REN Peng, CHENG Jia, WANG Jianbing, LIANG Zhenjie, XIANG Zheng. Relative Positioning Technology for Two Points Based on Cluster Cooperative Orientation [J]. Acta Armamentarii, 2023, 44(S2): 22-34. |
| [3] | CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information [J]. Acta Armamentarii, 2023, 44(S2): 157-166. |
| [4] | LIU Can, WANG Hui, LIN Defu, CUI Xiaoxi, XU Hanhui. Bearings-Only Target Tracking Algorithm with Non-Gaussian Heavy-Tailed Distributed Noise [J]. Acta Armamentarii, 2023, 44(5): 1469-1481. |
| [5] | GONG Ya-dong, SUN Yao, LIU Yin. Experimental Investigation and Modeling of Three-dimensional Surface Roughness in LS-WEDM of TC4 [J]. Acta Armamentarii, 2016, 37(6): 1058-1065. |
| [6] | LIU Sheng-song, CHEN Shao-hua, CHEN Chuan. Combined Algorithm for Motion Parameter Estimation of Target on Underwater Static Platform [J]. Acta Armamentarii, 2016, 37(4): 684-689. |
| [7] | HUANG Xiang-yuan, TANG Xia-qing, WU Meng, WU Wei-sheng. Research on Initial Alignment of Moving Base with 5th-degree Dimensionality Reduction SR-CKF [J]. Acta Armamentarii, 2016, 37(2): 219-225. |
| [8] | LIU Ming-yong, ZHU Li, DONG Hai-xia. Research on Gyroscope Array Based on Kalman Filter [J]. Acta Armamentarii, 2016, 37(2): 272-278. |
| [9] | YI Huai-jun, LIU Ning, ZHANG Xiang-yan, DING Chuan-jun. Prediction of Gun Barrel Wear Based on Improved Non-equal Interval Grey Model and BP Neural Network [J]. Acta Armamentarii, 2016, 37(12): 2220-2225. |
| [10] | ZHU Ming-qiang, HOU Jian-jun, LIU Ying , LI Xu, TIAN Hong-juan. An Time Delay Difference Estimation Algorithm Based on Improved Unscented Particle Filter Suitable for Target Tracking inWireless Sensor Network [J]. Acta Armamentarii, 2015, 36(7): 1266-1272. |
| [11] | XIAN Yong, LI Shao-peng, LI Bang-jie. An Approach to Attitude Angle Adjustment of Solid Missiles under the Condition of Depleted Shutdown Based on BP NeuralNetwork [J]. Acta Armamentarii, 2015, 36(4): 668-673. |
| [12] | ZENG Guang-yu, SHEN Qiang, LI Dong-guang, HE Xin. Modeling and Simulation on GNSS Vector Tracking Loop Based on Extended Kalman Filter [J]. Acta Armamentarii, 2015, 36(3): 530-538. |
| [13] | PAN Jia-liang, XIONG Zhi, WANG Li-na, YU Feng, ZHAO Hui, LIN Ai-jun. A Simplified UKF Algorithm for SINS/GPS/CNS Integrated Navigation System in Launch Inertial Coordinate System [J]. Acta Armamentarii, 2015, 36(3): 484-491. |
| [14] | YANG Gui-bing, LI Chang-bing, LIAO Zi-li, MA Xiao-jun, LIU Chun-guang. Method of Vehicle Speed Estimation Adapted in All Conditions for All-wheel Independent Drive Vehicle [J]. Acta Armamentarii, 2015, 36(10): 2006-2011. |
| [15] | WANG Jian-chen, QI Xiao-hui. Sensor Fault Estimation Method for Flight Control Systems Based on Aerodynamic Parameter Identification [J]. Acta Armamentarii, 2015, 36(1): 103-110. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||