
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (2): 566-576.doi: 10.12382/bgxb.2021.0584
Previous Articles Next Articles
ZHANG Tian1, JIN Shuxin2, WANG Qiang1, DUAN Xiaobo1, LIU Tiecheng1, NIU Haitao1, HOU Zeng1, YANG Yi3, LIU Tong3,*( )
)
Received:2021-08-31
Online:2022-06-23
Contact:
LIU Tong
CLC Number:
ZHANG Tian, JIN Shuxin, WANG Qiang, DUAN Xiaobo, LIU Tiecheng, NIU Haitao, HOU Zeng, YANG Yi, LIU Tong. High-Sensitivity Follow-up Control Technology Based on Micro-Inertial Sensors[J]. Acta Armamentarii, 2023, 44(2): 566-576.
Add to citation manager EndNote|Ris|BibTeX
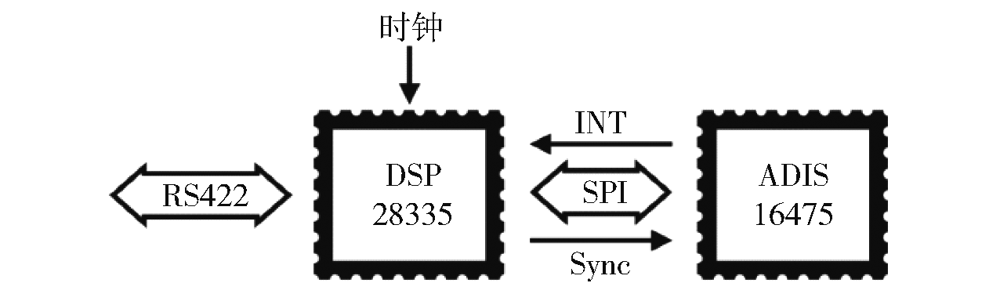
Fig.1 DSP28335 minimum system with ADIS16475
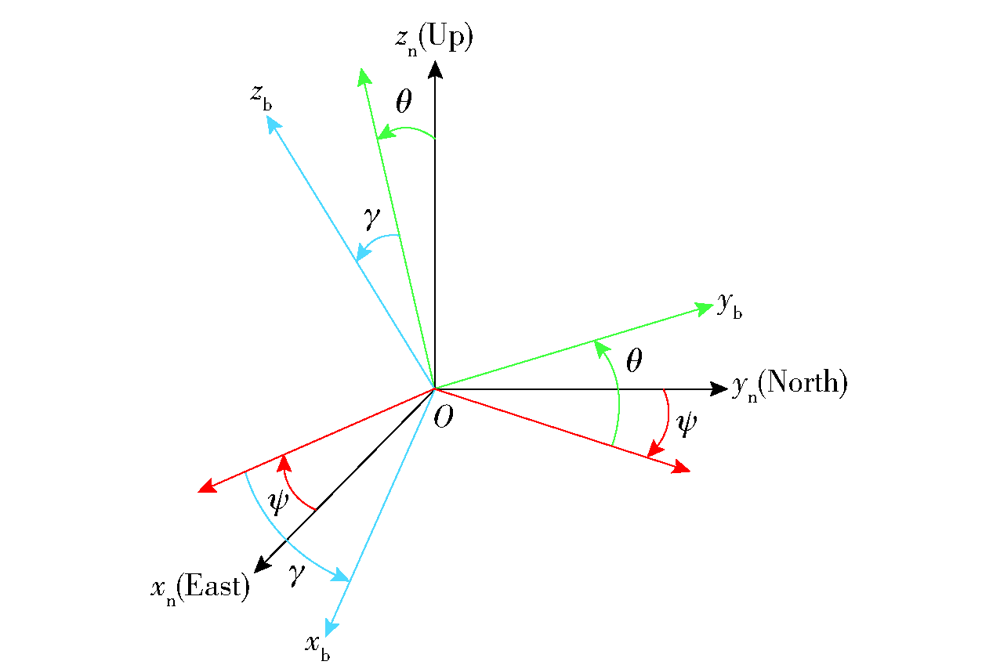
Fig.2 Three transformations of the coordinate transformation matrix

Fig.3 Schematic diagram of the small turntable structure
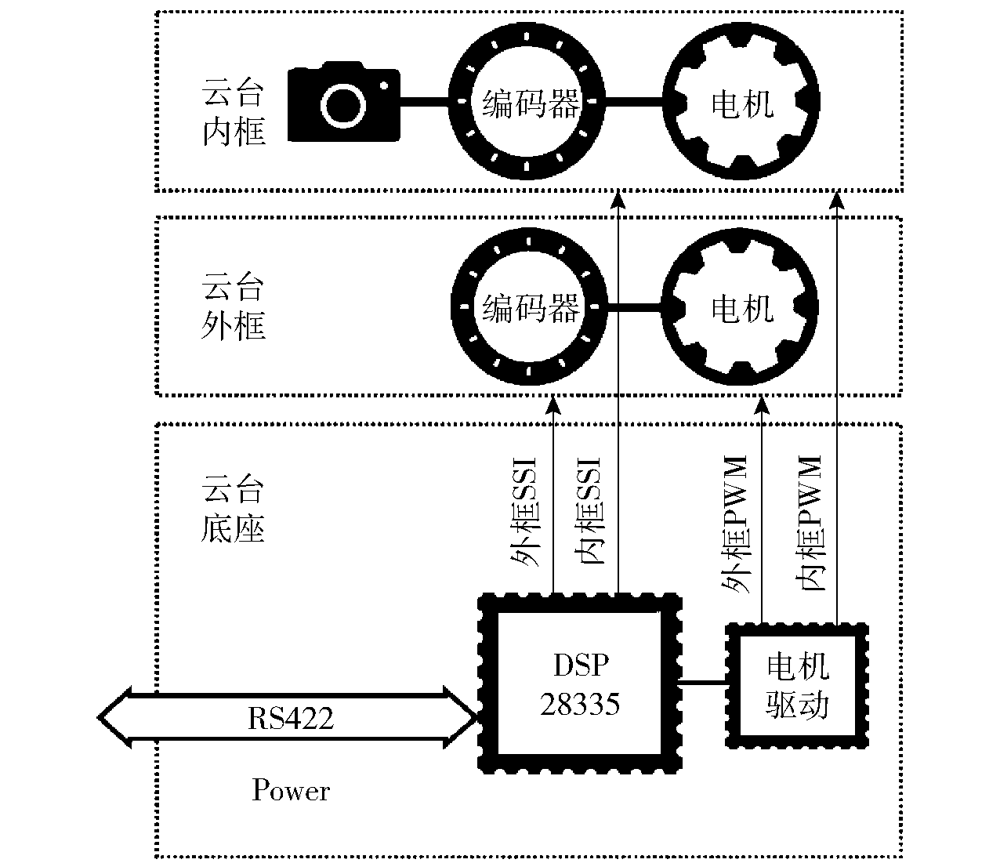
Fig.4 Electrical schematic diagram of the two-axis turntable
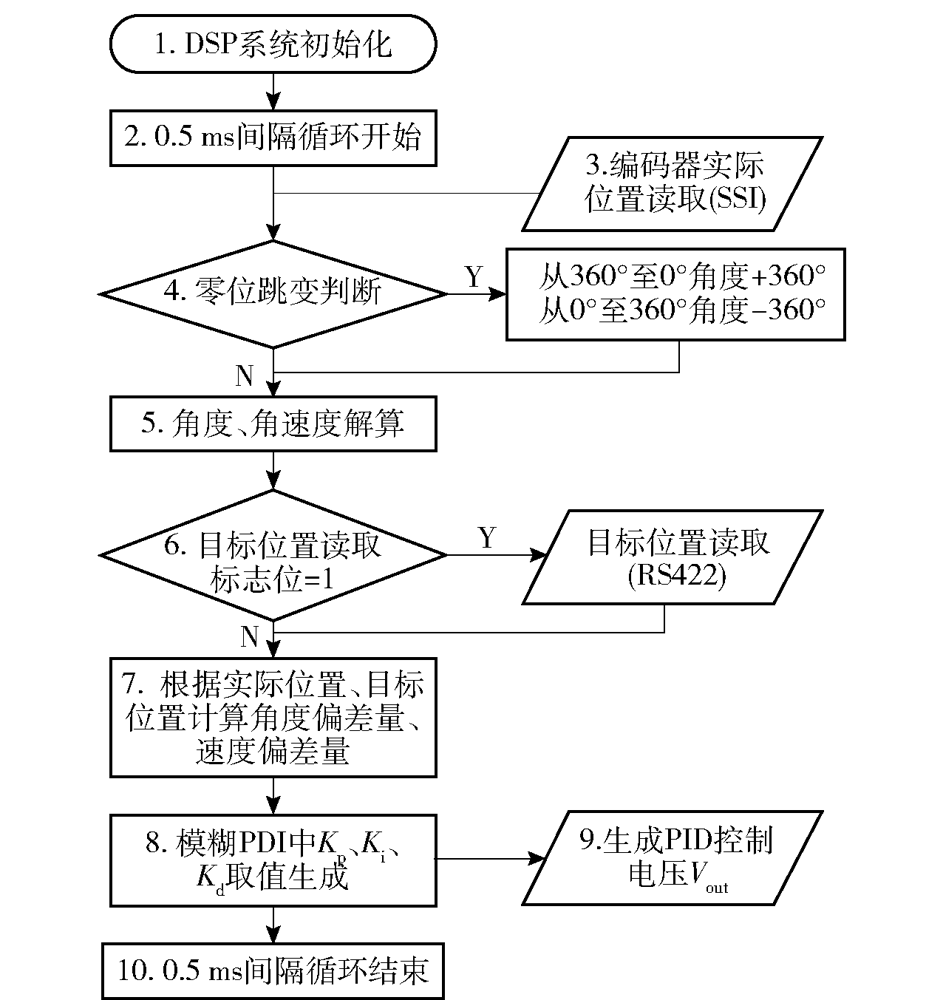
Fig.5 Control block diagram of the turntable with DSP28335
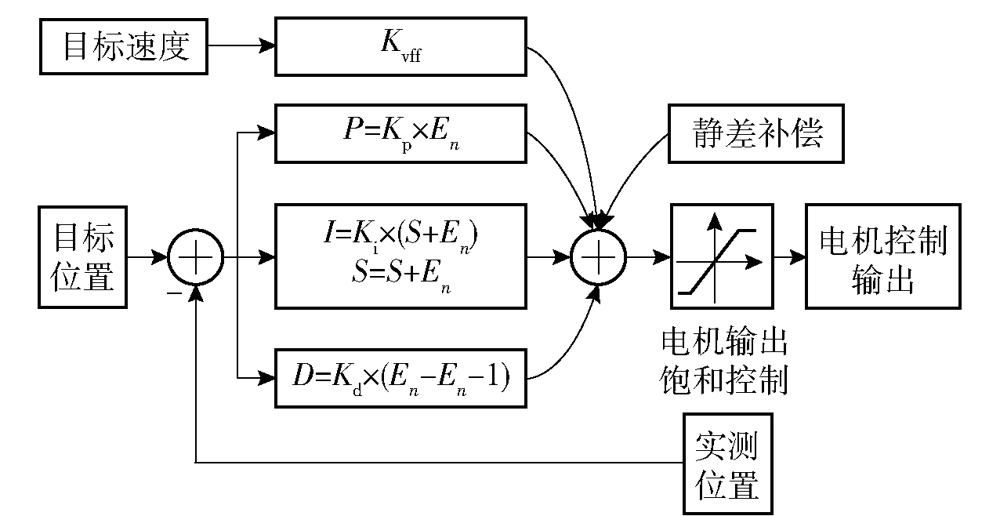
Fig.6 Design of the digital PID controller

Fig.7 Attitude accuracy test equipment
Fig.8 Attitude measurement accuracy experiment
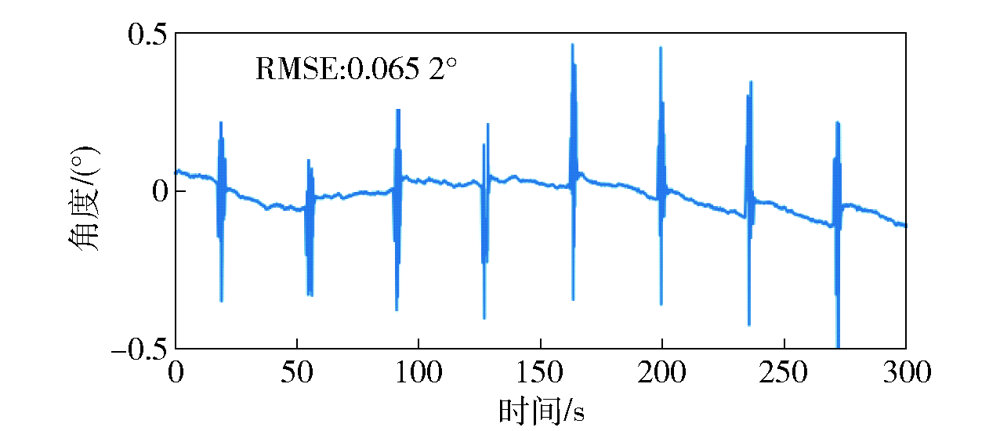
Fig.9 Relationship between heading angle error andtime

Fig.10 Head movement measurement equipment
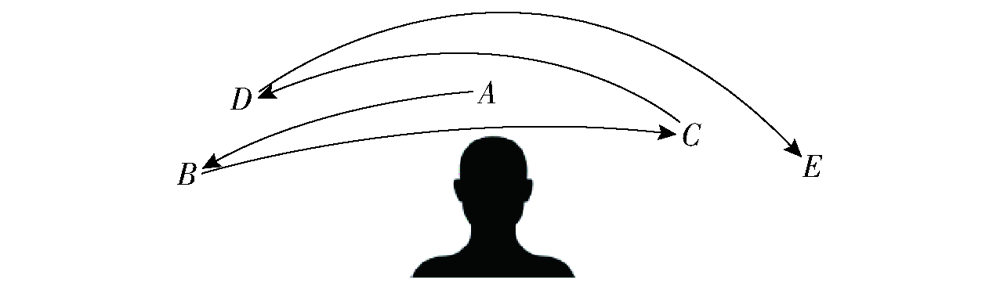
Fig.11 Schematic diagram of the head position measurement test

Fig.12 Data of the ten measurement experiments
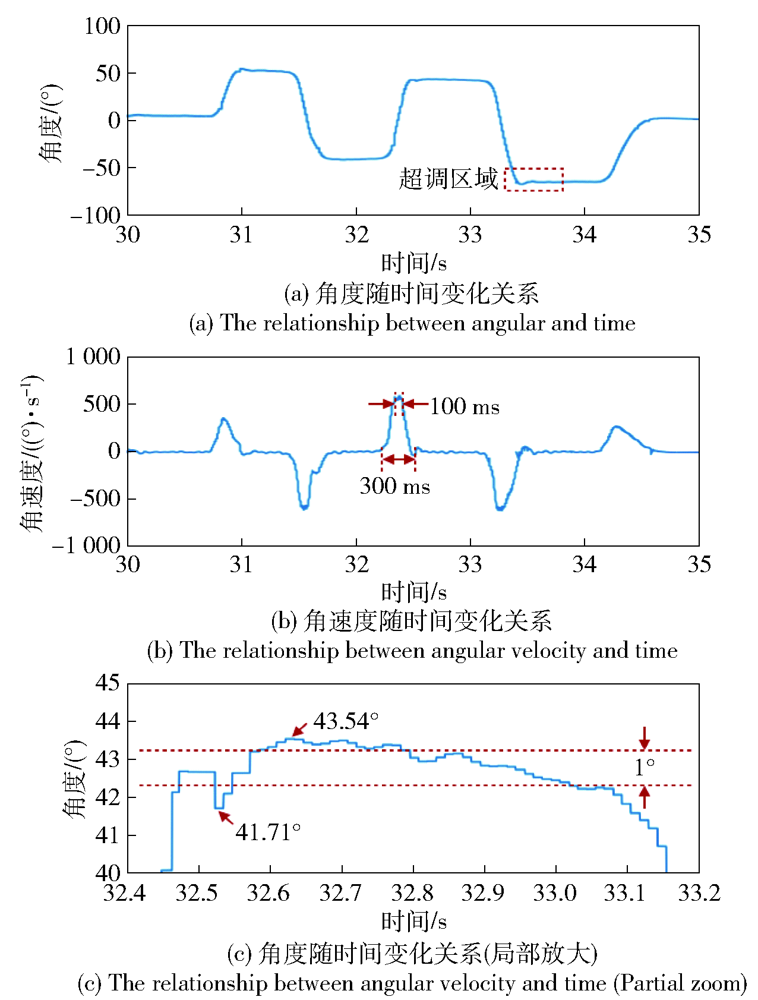
Fig.13 Single-time measurement data
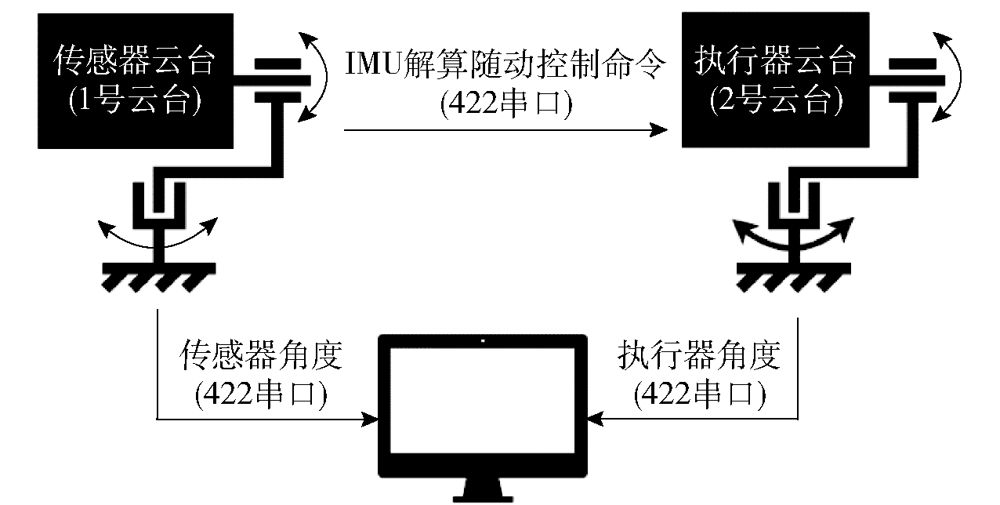
Fig.14 Schematic diagram of the gimbal motion response experiment
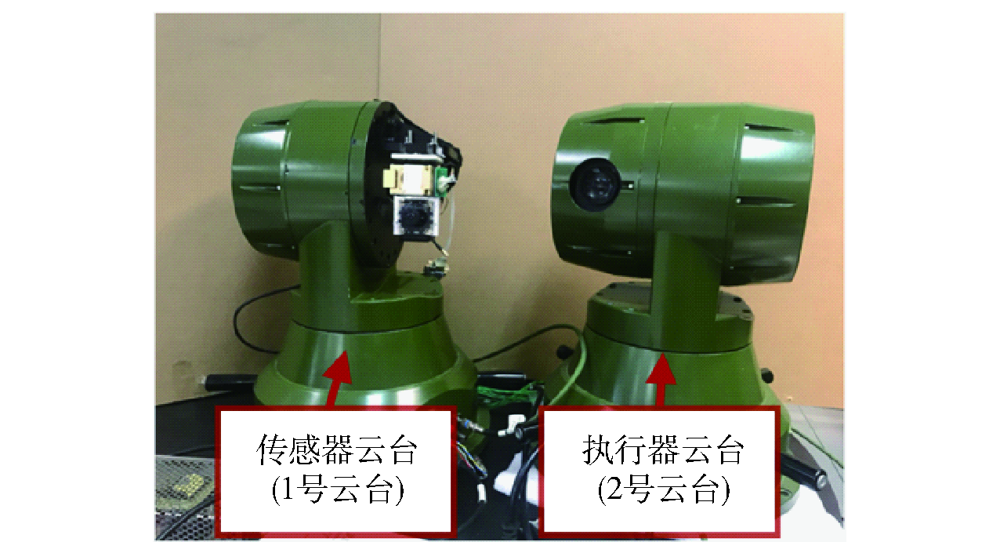
Fig.15 Experimental equipment for PTZ motion response
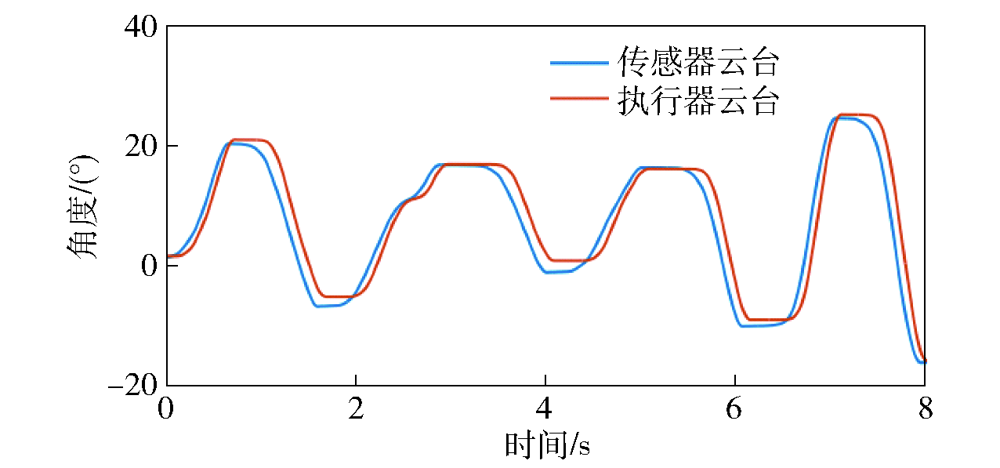
Fig.16 Schematic diagram for the calculation of follow-up response delay
| 序号及平均值 | 延时/ms | 标准差/(°) |
|---|---|---|
| 1 | 87.04 | 1.80002 |
| 2 | 76.01 | 2.28956 |
| 3 | 88.33 | 2.48999 |
| 4 | 91.18 | 2.60603 |
| 5 | 93.04 | 1.65869 |
| 6 | 93.43 | 2.27194 |
| 平均值 | 88.17 |
Table 1 Follow-up delay time estimation
| 序号及平均值 | 延时/ms | 标准差/(°) |
|---|---|---|
| 1 | 87.04 | 1.80002 |
| 2 | 76.01 | 2.28956 |
| 3 | 88.33 | 2.48999 |
| 4 | 91.18 | 2.60603 |
| 5 | 93.04 | 1.65869 |
| 6 | 93.43 | 2.27194 |
| 平均值 | 88.17 |

Fig.17 Experiments of location follow-up response
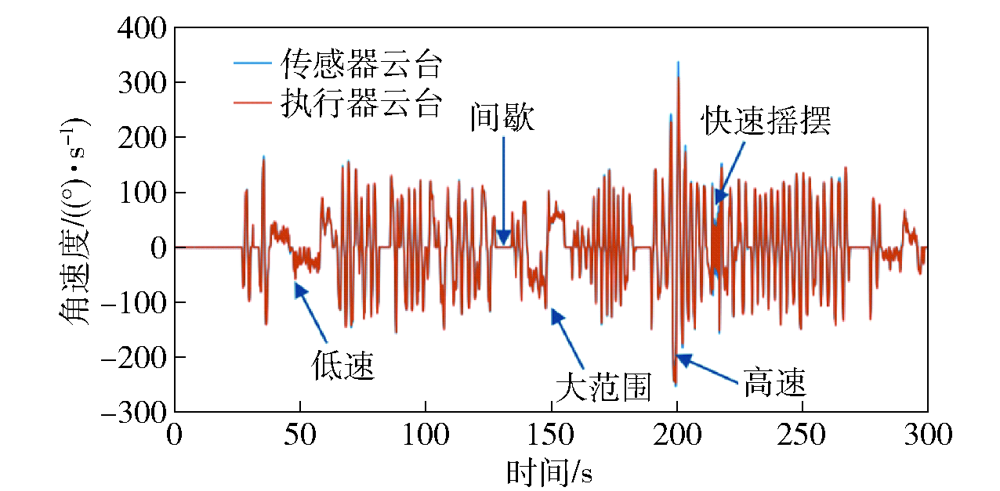
Fig.18 Relationship between course angle velocity and time
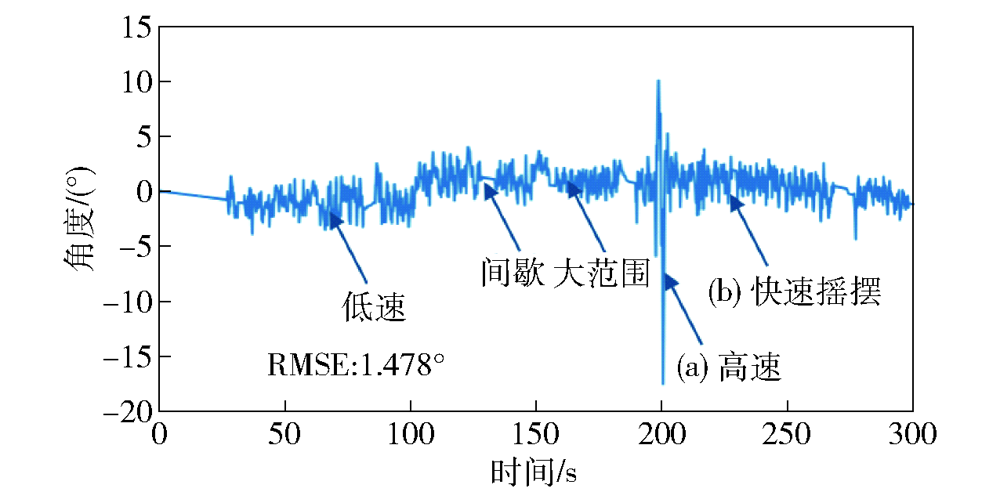
Fig.19 Relationship between course angle deviation and time
| [1] |
张天, 王强, 牛海涛, 等. 基于微惯性技术的人体头部运动姿态测量[J]. 导航与控制, 2021, 20(4):96-100.
|
|
|
|
| [2] |
张天, 牛海涛, 侯曾, 等. 增强现实技术在军事装备中的应用[C]// 第十四届全国信号和智能信息处理与应用学术会议论文集. 北京: 中国高科技产业化研究会, 2021:328-333.
|
|
|
|
| [3] |
平佳敏, 刘越, 翁冬冬. 虚实融合场景中的深度感知研究综述[J]. 中国图象图形学报, 2021, 26(6):1503-1520.
|
|
|
|
| [4] |
李德栋, 肖楚琬, 逄绪阳. F-35全向光电探测系统实战性分析[J]. 激光与红外, 2017, 47(3):322-326.
|
|
|
|
| [5] |
周忠, 周颐, 肖江剑. 虚拟现实增强技术综述[J]. 中国科学:信息科学, 2015, 45(2):157-180.
|
|
|
|
| [6] |
高源, 刘越, 程德文, 等. 头盔显示器发展综述[J]. 计算机辅助设计与图形学学报, 2016, 28(6):896-904.
|
|
|
|
| [7] |
|
| [8] |
doi: 10.1109/Access.6287639 URL |
| [9] |
孙长库, 黄璐, 王鹏, 等. 运动平台双IMU与视觉组合姿态测量算法[J]. 传感技术学报, 2018, 31(9):69-76,80.
|
|
|
|
| [10] |
王帅, 潘树国, 黄砺枭, 等. 单目视觉惯性定位的IMU辅助跟踪模型Positioning[J]. 测绘通报, 2018(11): 58-62.
|
|
|
|
| [11] |
李中. 高精度转台控制方法研究[D]. 西安: 西安电子科技大学, 2014.
|
|
|
|
| [12] |
王力, 钱林方, 高强, 等. 基于灰预测模糊PID的随动系统负载模拟器力矩控制研究[J]. 兵工学报, 2012, 33(11): 1379-1386.
|
|
|
|
| [13] |
doi: 10.3390/s16050613 URL |
| [14] |
|
| [15] |
doi: 10.1016/j.cja.2019.07.021 URL |
| [16] |
黄令龙, 郭阳宽, 蒋培军, 等. 高精密伺服转台控制系统的设计[J]. 清华大学学报(自然科学版), 2004, 44(8):1054-1056.
|
|
|
|
| [17] |
薛开, 王平, 王文斌, 等. 基于多轴运动控制器的二轴转台控制系统[J]. 哈尔滨工程大学学报, 2006, 27(4):570-573.
|
|
|
|
| [18] |
郑艳文, 王彤宇, 林琳, 等. 基于DSP的二轴转台伺服控制系统设计[J]. 机电工程, 2013, 30(2):210-213.
|
|
|
|
| [19] |
doi: 10.1109/TAES.2017.2722558 URL |
| [20] |
doi: 10.1109/JSEN.2016.2646742 URL |
| [1] | LI Liang, LI Feng, FENG Yong-bao, YAO Xiao-guang. Research on Control Strategy of Large Hydraulic Erecting System Based on Adaptive Fuzzy Sliding Mode [J]. Acta Armamentarii, 2016, 37(1): 71-76. |
| [2] | HU Yu,WANG Hua, REN Zhang. Entry Trajectory Tracking of RLV Based on Fuzzy Variable Structure Control [J]. Acta Armamentarii, 2015, 36(10): 1899-1906. |
| [3] | WANG Zhao-lei, WANG Qing, RAN Mao-peng, DONG Chao-yang. Integrated Guidance and Control Backstepping Design of Blended Control Missile Based on Adaptive Fuzzy Sliding Mode Control [J]. Acta Armamentarii, 2015, 36(1): 78-86. |
| [4] | YAN Yong-bao, ZHANG Yu-nan, YAN Nan-ming. Research on Acceleration Slip Regulation of 6×6 Electrically-driven Wheeled Vehicle [J]. Acta Armamentarii, 2014, 35(9): 1335-1343. |
| [5] | XIONG Jun-hui, TANG Sheng-jing, GUO Jie, ZHU Da-lin. Design of Variable Structure Guidance Law for Head-on Interception Based on Variable Coefficient Strategy [J]. Acta Armamentarii, 2014, 35(1): 134-139. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||