
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (7): 240575-.doi: 10.12382/bgxb.2024.0575
Previous Articles Next Articles
WANG Boyang1,2,*( ), LI Xinping1, SONG Junjie3, GUAN Haijie1, LIU Hai’ou1, CHEN Huiyan1
), LI Xinping1, SONG Junjie3, GUAN Haijie1, LIU Hai’ou1, CHEN Huiyan1
Received:2024-07-15
Online:2025-08-12
Contact:
WANG Boyang
WANG Boyang, LI Xinping, SONG Junjie, GUAN Haijie, LIU Hai’ou, CHEN Huiyan. A Trajectory Tracking Control Method Incorporating Behavior Primitive Optimization and Game Coordination[J]. Acta Armamentarii, 2025, 46(7): 240575-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Flowchart of trajectory tracking control method incorporating behavior primitive optimization and game coordination
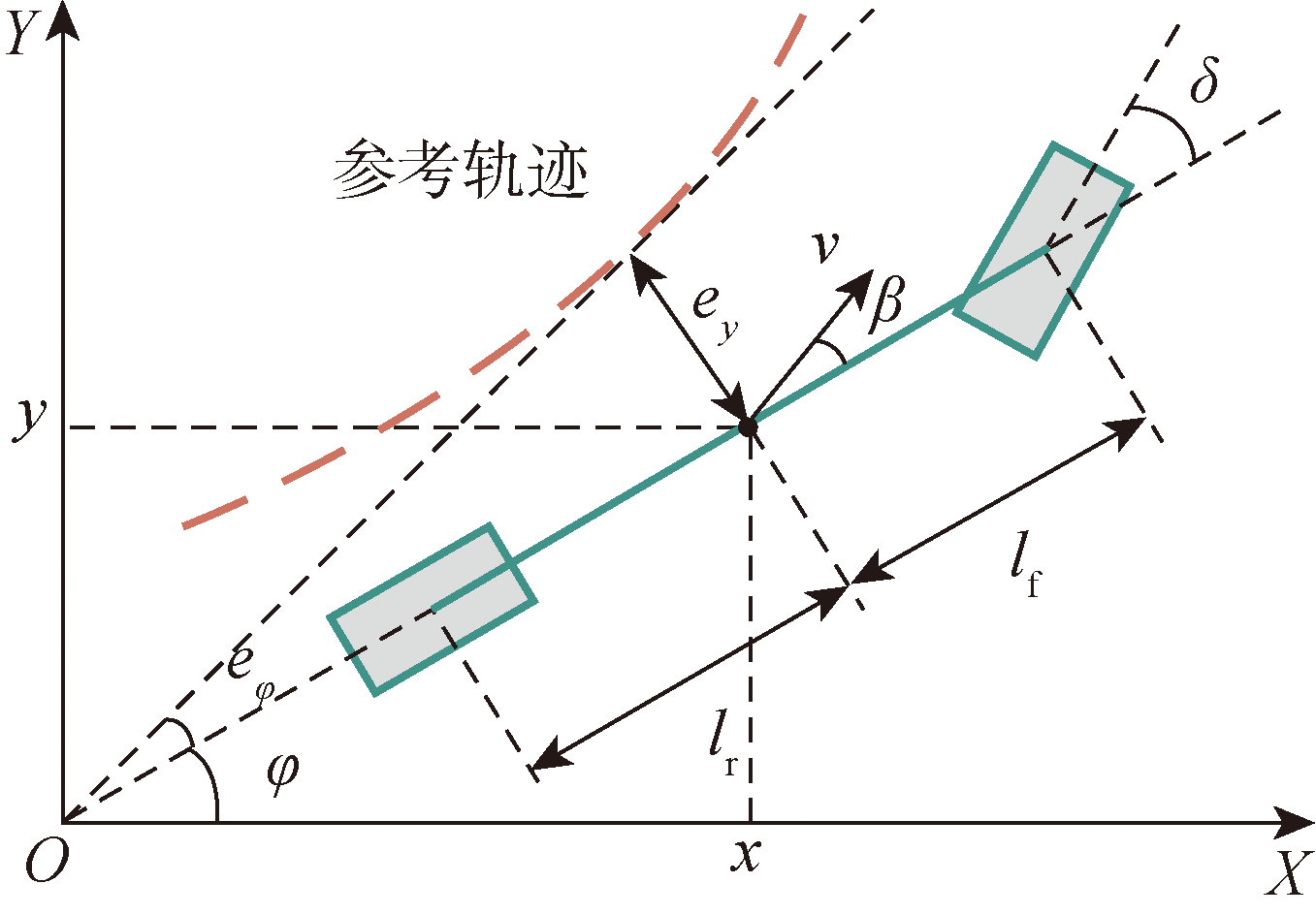
Fig.2 Vehicle kinematic model
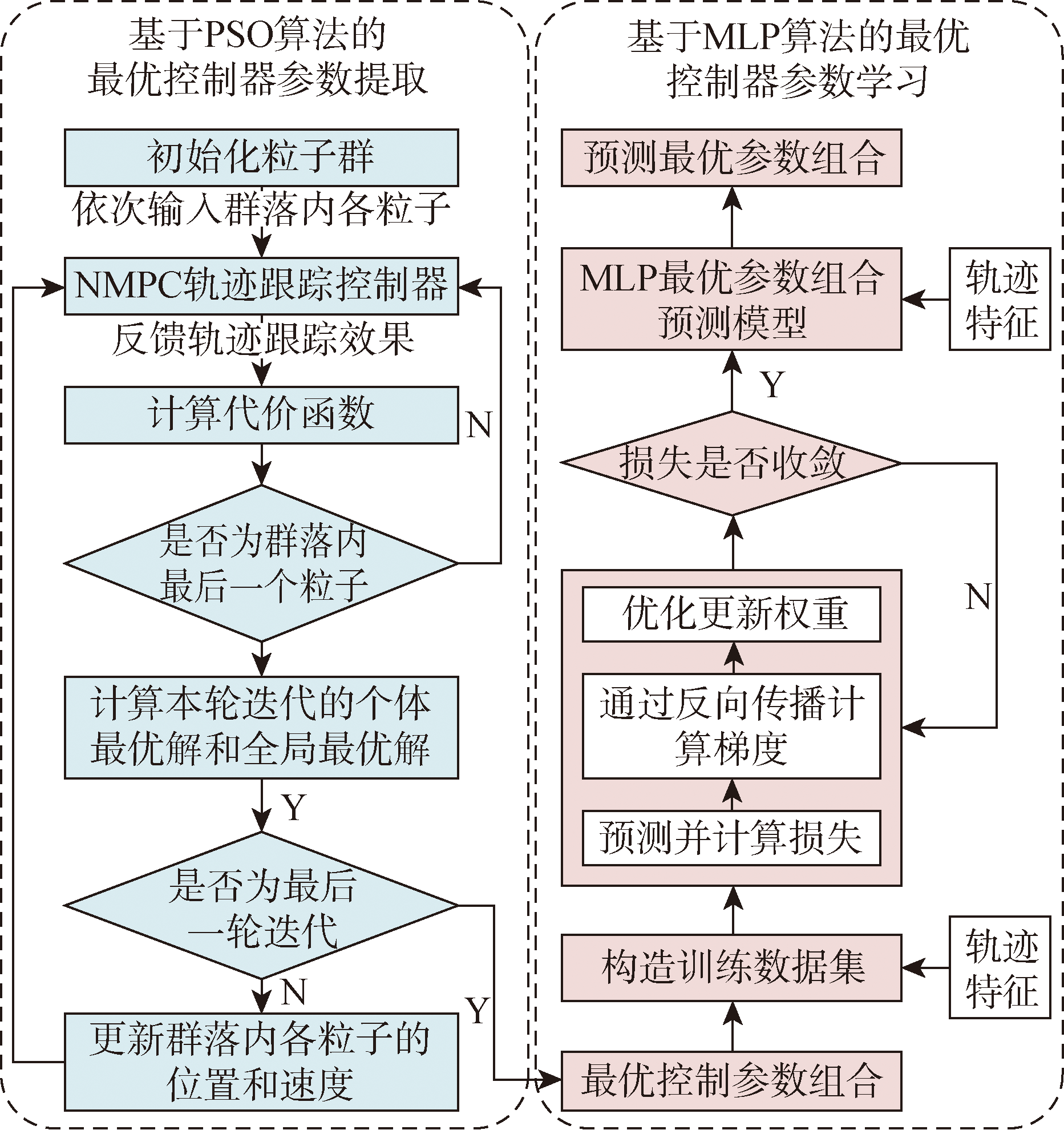
Fig.3 Flowchart of controller parameter optimization algorithm

Fig.4 Algorithm schematic diagram of MLP

Fig.5 Schematic diagram of game coordinated control strategy
| 类型编码 | 泛化方式 | DMP | Np | qxy | qφ | qv | r |
|---|---|---|---|---|---|---|---|
| 2 (J形弯) | 未泛化 | DMP1 | 12 | 262 | 410 | 543 | 48 |
| 终点泛化 | DMP2 | 8 | 162 | 321 | 611 | 33 | |
| DMP3 | 13 | 354 | 601 | 340 | 50 | ||
| 转向泛化 | DMP2 | 6 | 142 | 757 | 823 | 48 | |
| DMP3 | 16 | 107 | 130 | 250 | 92 | ||
| 15 (单移线) | 未泛化 | DMP1 | 6 | 420 | 85 | 225 | 840 |
| 终点泛化 | DMP2 | 5 | 409 | 93 | 230 | 749 | |
| DMP3 | 7 | 353 | 81 | 211 | 814 | ||
| 转向泛化 | DMP2 | 6 | 673 | 92 | 398 | 555 | |
| DMP3 | 6 | 624 | 104 | 362 | 354 |
Table 1 Optimal controller parameters predicted by MLP model
| 类型编码 | 泛化方式 | DMP | Np | qxy | qφ | qv | r |
|---|---|---|---|---|---|---|---|
| 2 (J形弯) | 未泛化 | DMP1 | 12 | 262 | 410 | 543 | 48 |
| 终点泛化 | DMP2 | 8 | 162 | 321 | 611 | 33 | |
| DMP3 | 13 | 354 | 601 | 340 | 50 | ||
| 转向泛化 | DMP2 | 6 | 142 | 757 | 823 | 48 | |
| DMP3 | 16 | 107 | 130 | 250 | 92 | ||
| 15 (单移线) | 未泛化 | DMP1 | 6 | 420 | 85 | 225 | 840 |
| 终点泛化 | DMP2 | 5 | 409 | 93 | 230 | 749 | |
| DMP3 | 7 | 353 | 81 | 211 | 814 | ||
| 转向泛化 | DMP2 | 6 | 673 | 92 | 398 | 555 | |
| DMP3 | 6 | 624 | 104 | 362 | 354 |

Fig.6 Optimized results of J-turn DMP
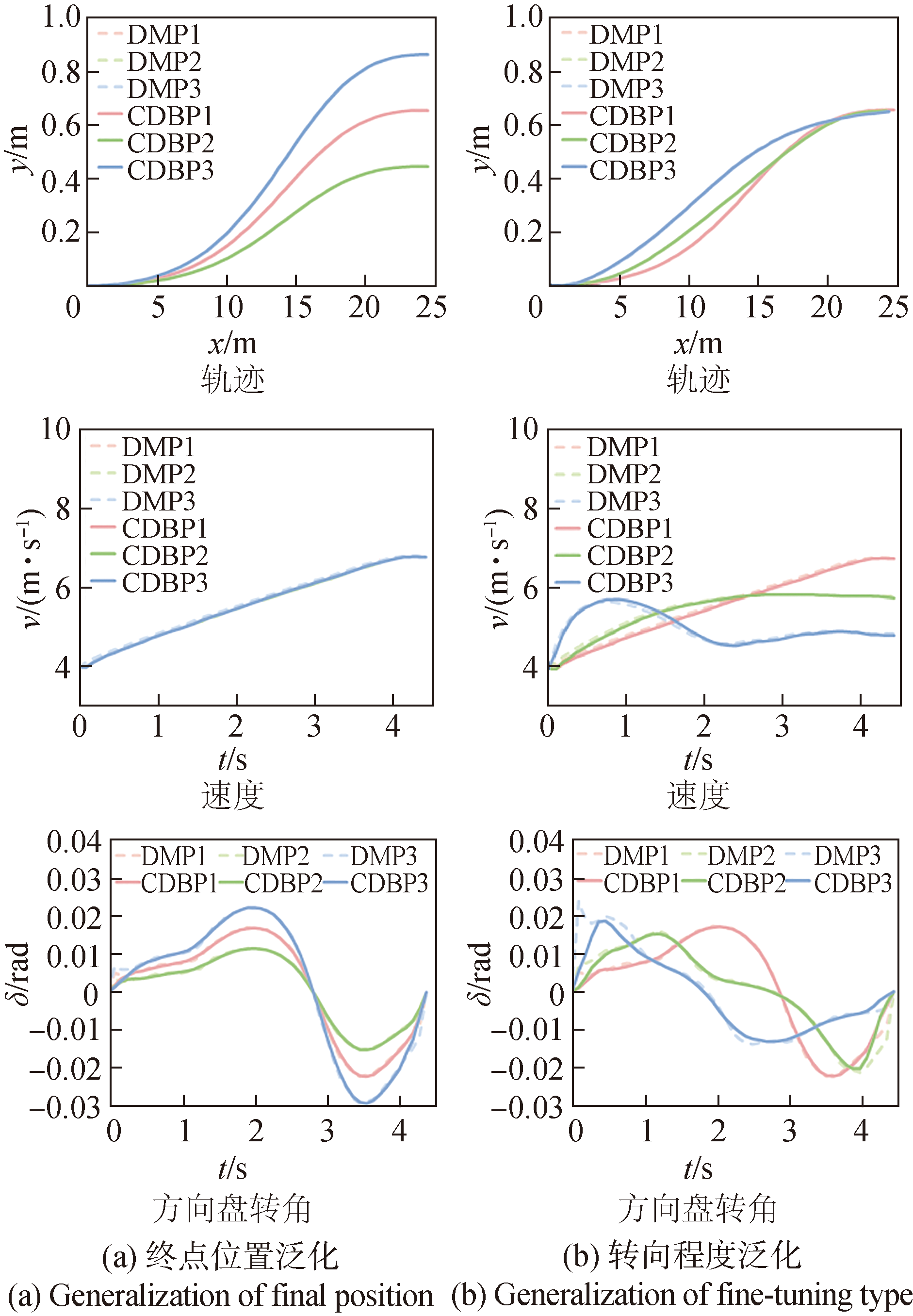
Fig.7 Optimized results of lane-changing DMP
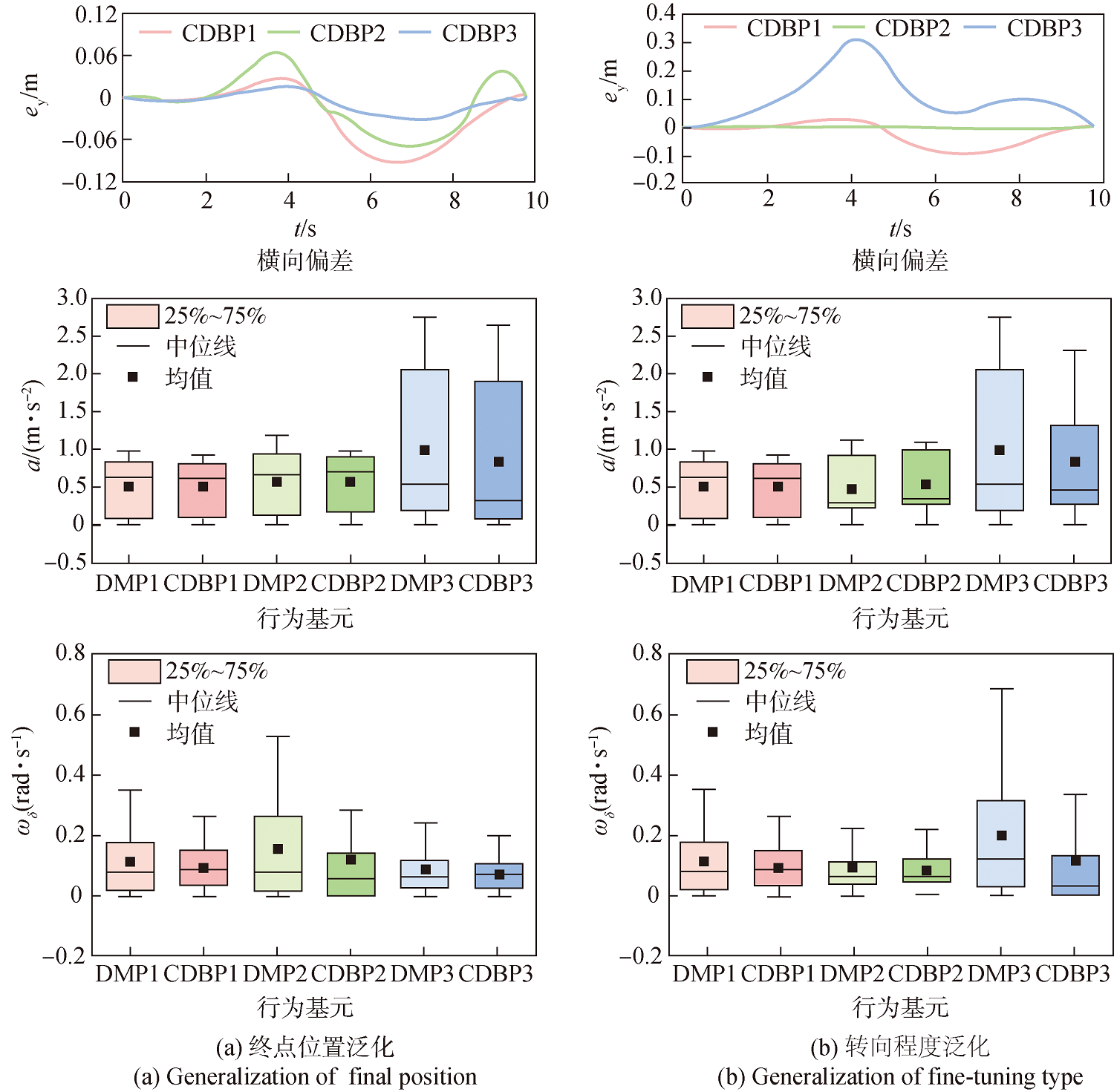
Fig.8 Analysis of J-turn DMP optimized results
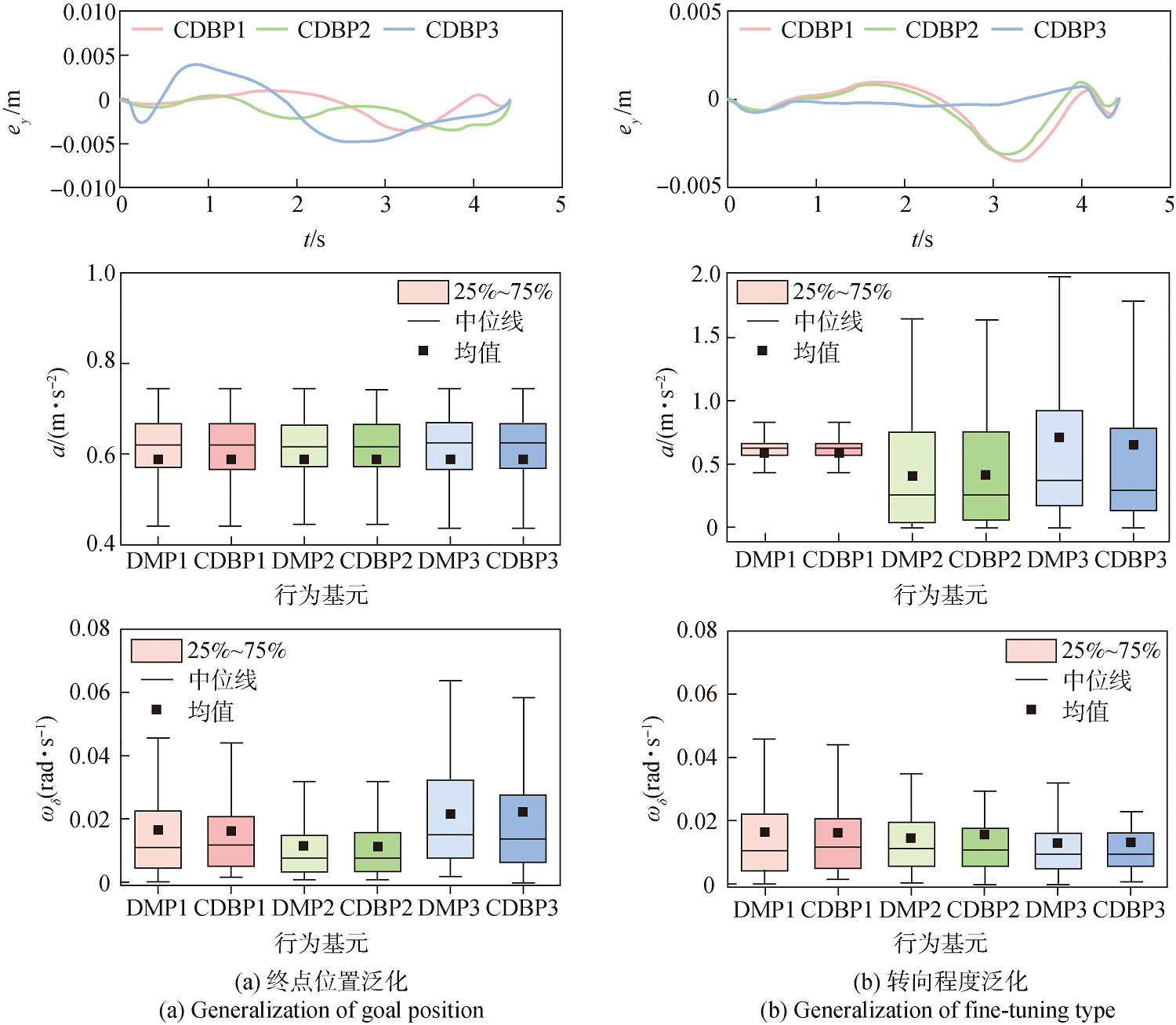
Fig.9 Analysis of lane-changing DMP pptimizated results
| 类型编码 | 泛化方式 | DMP | /m | eymax/m | / (m·s-1) | evmax/ (m·s-1) |
|---|---|---|---|---|---|---|
| 2 (J形弯) | 未泛化 | DMP1 | 0.0319 | 0.0934 | 0.1438 | 0.2771 |
| 终点泛化 | DMP2 | 0.0316 | 0.0706 | 0.1590 | 0.3348 | |
| DMP3 | 0.0123 | 0.0327 | 0.3513 | 0.6700 | ||
| 转向泛化 | DMP2 | 0.0315 | 0.0080 | 0.3178 | 0.5328 | |
| DMP3 | 0.1080 | 0.3112 | 0.3398 | 1.4057 | ||
| 15 (单移线) | 未泛化 | DMP1 | 0.0010 | 0.0036 | 0.0584 | 0.1212 |
| 终点泛化 | DMP2 | 0.0014 | 0.0036 | 0.0583 | 0.1211 | |
| DMP3 | 0.0026 | 0.0050 | 0.0584 | 0.1212 | ||
| 转向泛化 | DMP2 | 0.0009 | 0.0032 | 0.0416 | 0.1636 | |
| DMP3 | 0.0004 | 0.0012 | 0.0593 | 0.1982 |
Table 2 Deviation analysis of human-like features after trajectory optimization
| 类型编码 | 泛化方式 | DMP | /m | eymax/m | / (m·s-1) | evmax/ (m·s-1) |
|---|---|---|---|---|---|---|
| 2 (J形弯) | 未泛化 | DMP1 | 0.0319 | 0.0934 | 0.1438 | 0.2771 |
| 终点泛化 | DMP2 | 0.0316 | 0.0706 | 0.1590 | 0.3348 | |
| DMP3 | 0.0123 | 0.0327 | 0.3513 | 0.6700 | ||
| 转向泛化 | DMP2 | 0.0315 | 0.0080 | 0.3178 | 0.5328 | |
| DMP3 | 0.1080 | 0.3112 | 0.3398 | 1.4057 | ||
| 15 (单移线) | 未泛化 | DMP1 | 0.0010 | 0.0036 | 0.0584 | 0.1212 |
| 终点泛化 | DMP2 | 0.0014 | 0.0036 | 0.0583 | 0.1211 | |
| DMP3 | 0.0026 | 0.0050 | 0.0584 | 0.1212 | ||
| 转向泛化 | DMP2 | 0.0009 | 0.0032 | 0.0416 | 0.1636 | |
| DMP3 | 0.0004 | 0.0012 | 0.0593 | 0.1982 |
| 参数 | 数值 |
|---|---|
| 质心距离前轴距离lf/m | 1.040 |
| 质心距离后轴距离lr/m | 1.560 |
| 最大加速度约束amax/(m·s-2) | 3 |
| 最大前轮转角δmax/rad | 0.584 |
Table 3 The parameters of vehicle in Carsim model
| 参数 | 数值 |
|---|---|
| 质心距离前轴距离lf/m | 1.040 |
| 质心距离后轴距离lr/m | 1.560 |
| 最大加速度约束amax/(m·s-2) | 3 |
| 最大前轮转角δmax/rad | 0.584 |
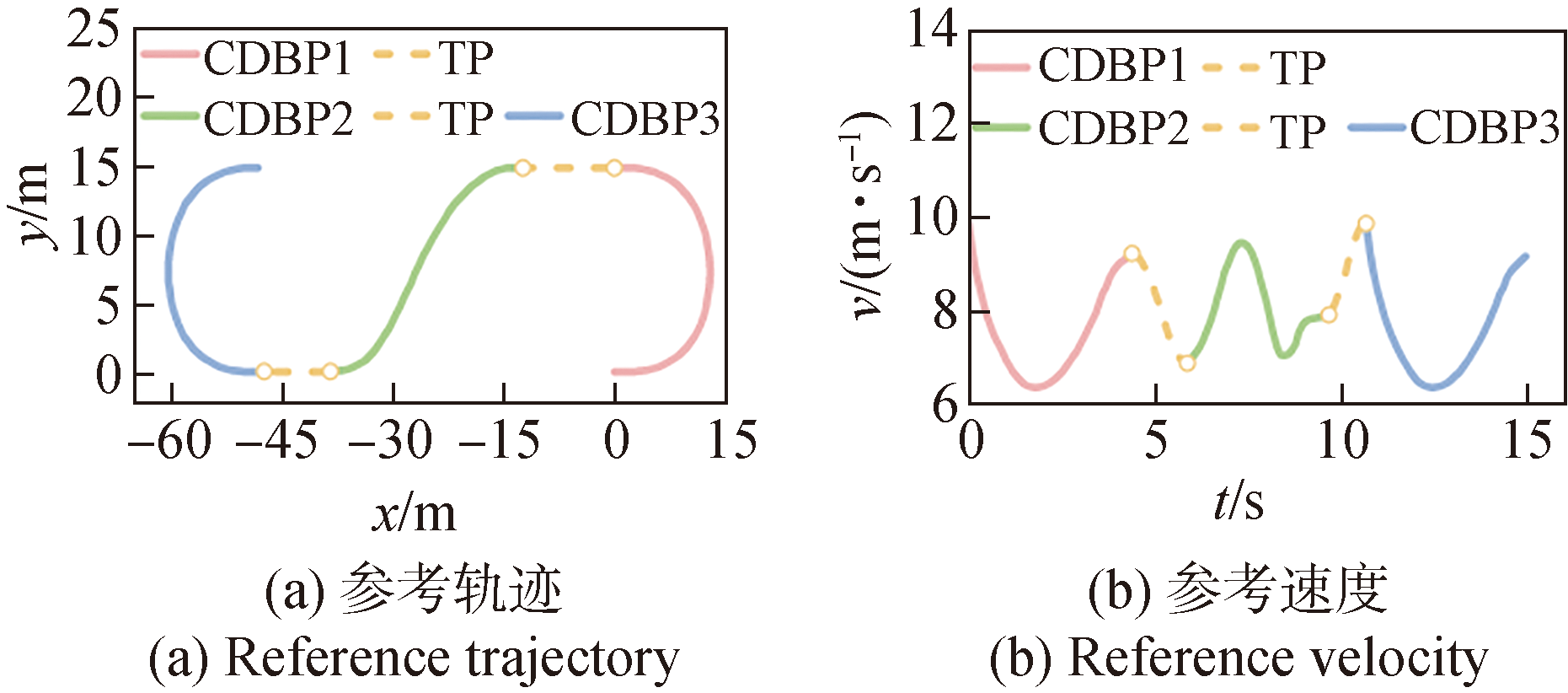
Fig.10 Reference trajectory and velocity of S-turn
| 基元 | Np | qxy | qφ | qv | r |
|---|---|---|---|---|---|
| U形弯基元 | 10 | 502 | 652 | 158 | 110 |
| 单移线基元 | 14 | 732 | 513 | 215 | 902 |
Table 4 MLP online prediction of optimal controller parameters
| 基元 | Np | qxy | qφ | qv | r |
|---|---|---|---|---|---|
| U形弯基元 | 10 | 502 | 652 | 158 | 110 |
| 单移线基元 | 14 | 732 | 513 | 215 | 902 |
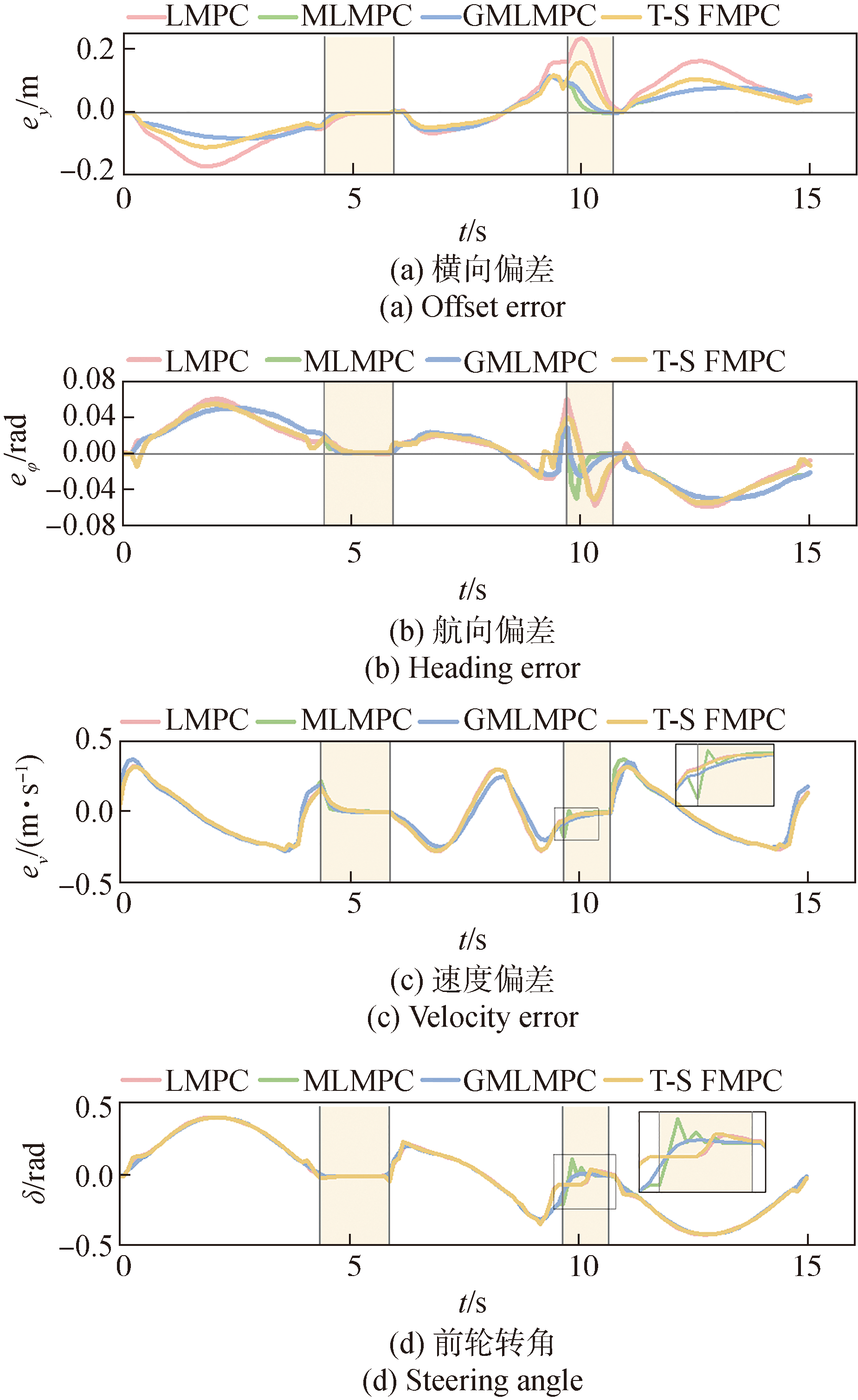
Fig.11 Experimental results of low-speed S-turn
| 算法 | ey/m | eφ/rad | ev/(m·s-1) |
|---|---|---|---|
| LMPC | 0.081(72.3%) | 0.025(13.6%) | 0.14(16.7%) |
| MLMPC | 0.047 | 0.022 | 0.12 |
| T-S FMPC | 0.055(17.1%) | 0.023(4.5%) | 0.14(16.7%) |
| GMLMPC | 0.047 | 0.022 | 0.12 |
Table 5 Experimental data of low-speed S-turn
| 算法 | ey/m | eφ/rad | ev/(m·s-1) |
|---|---|---|---|
| LMPC | 0.081(72.3%) | 0.025(13.6%) | 0.14(16.7%) |
| MLMPC | 0.047 | 0.022 | 0.12 |
| T-S FMPC | 0.055(17.1%) | 0.023(4.5%) | 0.14(16.7%) |
| GMLMPC | 0.047 | 0.022 | 0.12 |
| 算法 | ωTP/(rad·s-1) | |
|---|---|---|
| LMPC | 0.041(-16.3%) | 0.0009(40.6%) |
| MLMPC | 0.068(38.7%) | 0.0022(243.7%) |
| T-S FMPC | 0.053(8.1%) | 0.00091(42,2%) |
| GMLMPC | 0.049 | 0.00064 |
Table 6 Low-speed S-turn stability index
| 算法 | ωTP/(rad·s-1) | |
|---|---|---|
| LMPC | 0.041(-16.3%) | 0.0009(40.6%) |
| MLMPC | 0.068(38.7%) | 0.0022(243.7%) |
| T-S FMPC | 0.053(8.1%) | 0.00091(42,2%) |
| GMLMPC | 0.049 | 0.00064 |
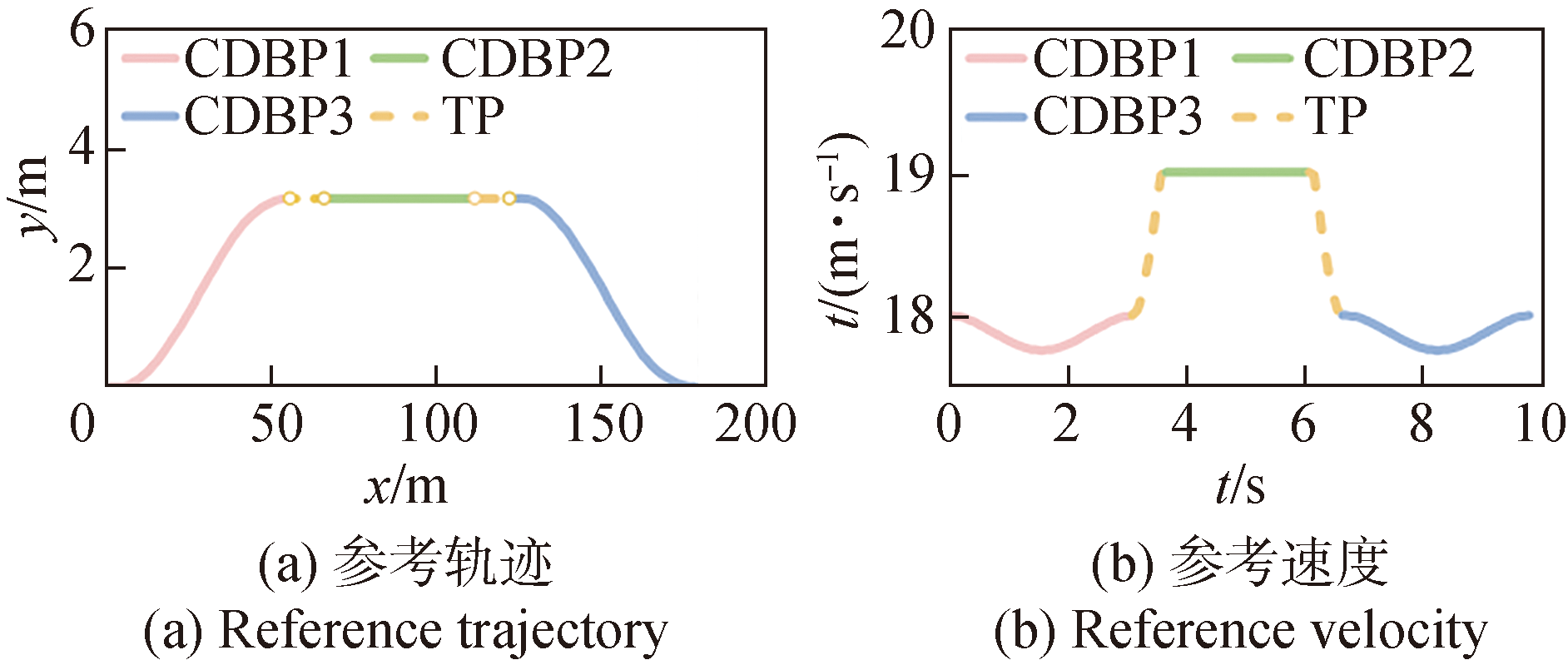
Fig.12 Reference trajectory and velocity of double-lane-change
| 基元 | Np | qxy | qφ | qv | r |
|---|---|---|---|---|---|
| 单移线基元 | 5 | 102 | 652 | 308 | 980 |
| 直线基元 | 8 | 578 | 513 | 312 | 732 |
Table 7 MLP online prediction of optimal controller parameters
| 基元 | Np | qxy | qφ | qv | r |
|---|---|---|---|---|---|
| 单移线基元 | 5 | 102 | 652 | 308 | 980 |
| 直线基元 | 8 | 578 | 513 | 312 | 732 |

Fig.13 Experimental results of high-speed double-lane-change
| 算法 | ey/m | eφ/rad | ev/(m·s-1) |
|---|---|---|---|
| LMPC | 0.0074(29.8%) | 0.0014(16.7%) | 0.00026(4%) |
| MLMPC | 0.0057 | 0.0012 | 0.00025 |
| T-S FMPC | 0.0066(15.8%) | 0.0014(16.7%) | 0.00026(4%) |
| GMLMPC | 0.0057 | 0.0012 | 0.00025 |
Table 8 Experimental data of high-speed double-lane-change
| 算法 | ey/m | eφ/rad | ev/(m·s-1) |
|---|---|---|---|
| LMPC | 0.0074(29.8%) | 0.0014(16.7%) | 0.00026(4%) |
| MLMPC | 0.0057 | 0.0012 | 0.00025 |
| T-S FMPC | 0.0066(15.8%) | 0.0014(16.7%) | 0.00026(4%) |
| GMLMPC | 0.0057 | 0.0012 | 0.00025 |
| 算法 | ωTP/(rad·s-1) | |
|---|---|---|
| LMPC | 0.0042(10.5%) | 0.000032(-3%) |
| MLMPC | 0.0065(71.1%) | 0.000035(6.1%) |
| T-S FMPC | 0.0046(21.1%) | 0.000034(3%) |
| GMLMPC | 0.0038 | 0.000033 |
Table 9 High-speed double-lane-change stability index
| 算法 | ωTP/(rad·s-1) | |
|---|---|---|
| LMPC | 0.0042(10.5%) | 0.000032(-3%) |
| MLMPC | 0.0065(71.1%) | 0.000035(6.1%) |
| T-S FMPC | 0.0046(21.1%) | 0.000034(3%) |
| GMLMPC | 0.0038 | 0.000033 |
| [1] |
熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10):127-143.
doi: 10.3901/JME.2020.10.127 |
|
doi: 10.3901/JME.2020.10.127 |
|
| [2] |
高振海, 朱乃宣, 高菲, 等. 考虑驾驶员特性的自学习换道轨迹规划系统[J]. 汽车工程, 2020, 42(12):1710-1717.
doi: 10.19562/j.chinasae.qcgc.2020.12.014 |
|
|
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
杜荣华, 胡鸿飞, 高凯, 等. 基于变预测时域MPC的自动驾驶汽车轨迹跟踪控制研究[J]. 机械工程学报, 2022, 58(24):275-288.
doi: 10.3901/JME.2022.24.275 |
|
|
|
| [8] |
|
| [9] |
李韶华, 杨泽坤, 王雪玮. 基于T-S模糊变权重MPC的智能车轨迹跟踪控制[J]. 机械工程学报, 2023, 59(4):199-212.
doi: 10.3901/JME.2023.04.199 |
|
|
|
| [10] |
|
| [11] |
马跃, 郭烈, 秦增科, 等. 考虑驾驶风格的路径跟踪控制方法[J]. 重庆理工大学学报(自然科学), 2022, 36(11):20-30.
|
|
|
|
| [12] |
|
| [13] |
|
| [14] |
王博洋, 龚建伟, 张瑞增, 等. 基于真实驾驶数据的运动基元提取与再生成[J]. 机械工程学报, 2020, 56(16):155-165.
doi: 10.3901/JME.2020.16.155 |
|
doi: 10.3901/JME.2020.16.155 |
|
| [15] |
|
| [16] |
|
| [17] |
卢佳兴, 刘海鸥, 关海杰, 等. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4):960-971.
|
|
doi: 10.12382/bgxb.2022.0009 |
|
| [18] |
龚建伟. 无人驾驶车辆模型预测控制[M]. 北京: 北京理工大学出版社, 2020.
|
|
|
|
| [19] |
臧勇, 蔡英凤, 孙晓强, 等. 基于可拓博弈的智能汽车轨迹跟踪协调控制方法研究[J]. 机械工程学报, 2022, 58(8):181-194.
doi: 10.3901/JME.2022.08.181 |
|
doi: 10.3901/JME.2022.08.181 |
|
| [20] |
|
| [1] | XIAO Peng, YU Haixia, HUANG Long, ZHANG Siming. 3D Path Planning of Unmanned Aerial Vehicle Based on MDEPSO Algorithm [J]. Acta Armamentarii, 2025, 46(7): 240710-. |
| [2] | QIN Taotao, JI Siyuan, LEI Lin, ZHENG Zhanfeng. Non-parametric Modelling and Muzzle Velocity Prediction of Multi-stage Induction Coilgun based on PSO-RNN Algorithm [J]. Acta Armamentarii, 2025, 46(7): 240616-. |
| [3] | ZHANG Fenglin, DONG Yihao, XIN Jianshe, GUO Liping, GU Xuechen, QU Jiaqi. Parameter Selection and Optimization Algorithm for Low-overload Compressed Air Launch of Small Unmanned Aerial Vehicles Based on Particle Swarm Optimization [J]. Acta Armamentarii, 2025, 46(2): 240014-. |
| [4] | HOU Peng, GE Yuxue, PEI Yang, YUE Yuan, AI Junqiang. UAV Air-to-ground Attack Task Assignment Method Based on Damage Assessment Results [J]. Acta Armamentarii, 2025, 46(2): 240212-. |
| [5] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [6] | WANG Dongzhen, ZHANG Yue, ZHAO Yu, HUANG Daqing. A UAV Trajectory Optimization Method Based on RRT-Dubins [J]. Acta Armamentarii, 2024, 45(8): 2761-2773. |
| [7] | LIU Fang, LI Shiwei, LU Xi, GUO Ce’an. Prediction of Peak Overpressure of Underwater Cylindrical Charge Based on PSO-CNN-XGBoost [J]. Acta Armamentarii, 2024, 45(5): 1602-1612. |
| [8] | LI Huanhuan, LIU Hui, GAI Jiangtao, LI Xunming. Steering Control of Dual-motor Coupling Drive Tracked Vehicle Based on PSO PID Parameter Optimization [J]. Acta Armamentarii, 2024, 45(3): 916-924. |
| [9] | YANG Jing, LU Minghua, GUO Liqiang, MA Jieqiong, WU Jinping, ZHANG Hui. Operational Decision Analysis and Optimization Method of Submarine Integrated Defense against Torpedo in Uncertain Environment [J]. Acta Armamentarii, 2024, 45(2): 564-573. |
| [10] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [11] | XU Peng, ZHAO Jianxin, FAN Wenhui, QIU Tianqi, JIANG Lei, LIANG Zhenjie, LIU Yufei. Specific Complex Locomotion Skills Control for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 135-145. |
| [12] | WANG Lei, XU Chao, LI Miao, ZHAO Huiwu. Improved Particle Swarm Optimization Algorithm for Cooperative Task Assignment of Multiple vehicles [J]. Acta Armamentarii, 2023, 44(8): 2224-2232. |
| [13] | FAN Boyang, ZHAO Gaopeng, BO Yuming, WU Xiang. Collaborative Task Allocation Method for Multi-Target Air-Ground Heterogeneous Unmanned System [J]. Acta Armamentarii, 2023, 44(6): 1564-1575. |
| [14] | CHEN Meishan, LIU Ying, ZENG Weigui, QIAN Kun. Dynamic Jamming Resource Allocation Strategy of MALD [J]. Acta Armamentarii, 2023, 44(5): 1443-1455. |
| [15] | LU Jiaxing, LIU Haiou, GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong. Trajectory Tracking Control of Unmanned Tracked Vehicles Based on Adaptive Dual-Parameter Optimization [J]. Acta Armamentarii, 2023, 44(4): 960-971. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||