
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (5): 241146-.doi: 10.12382/bgxb.2024.1146
ZHOU Zhenlin1,2, LONG Teng1,2,3,4, LIU Dawei5, SUN Jingliang1,2,3,*( ), ZHONG Jianxin1,2, LI Junzhi1,2
), ZHONG Jianxin1,2, LI Junzhi1,2
Received:2024-12-24
Online:2025-05-07
Contact:
SUN Jingliang
CLC Number:
ZHOU Zhenlin, LONG Teng, LIU Dawei, SUN Jingliang, ZHONG Jianxin, LI Junzhi. Path Planning Method for Large-scale UAV Swarms Based on Reinforcement Learning Conflict Resolution[J]. Acta Armamentarii, 2025, 46(5): 241146-.
Add to citation manager EndNote|Ris|BibTeX
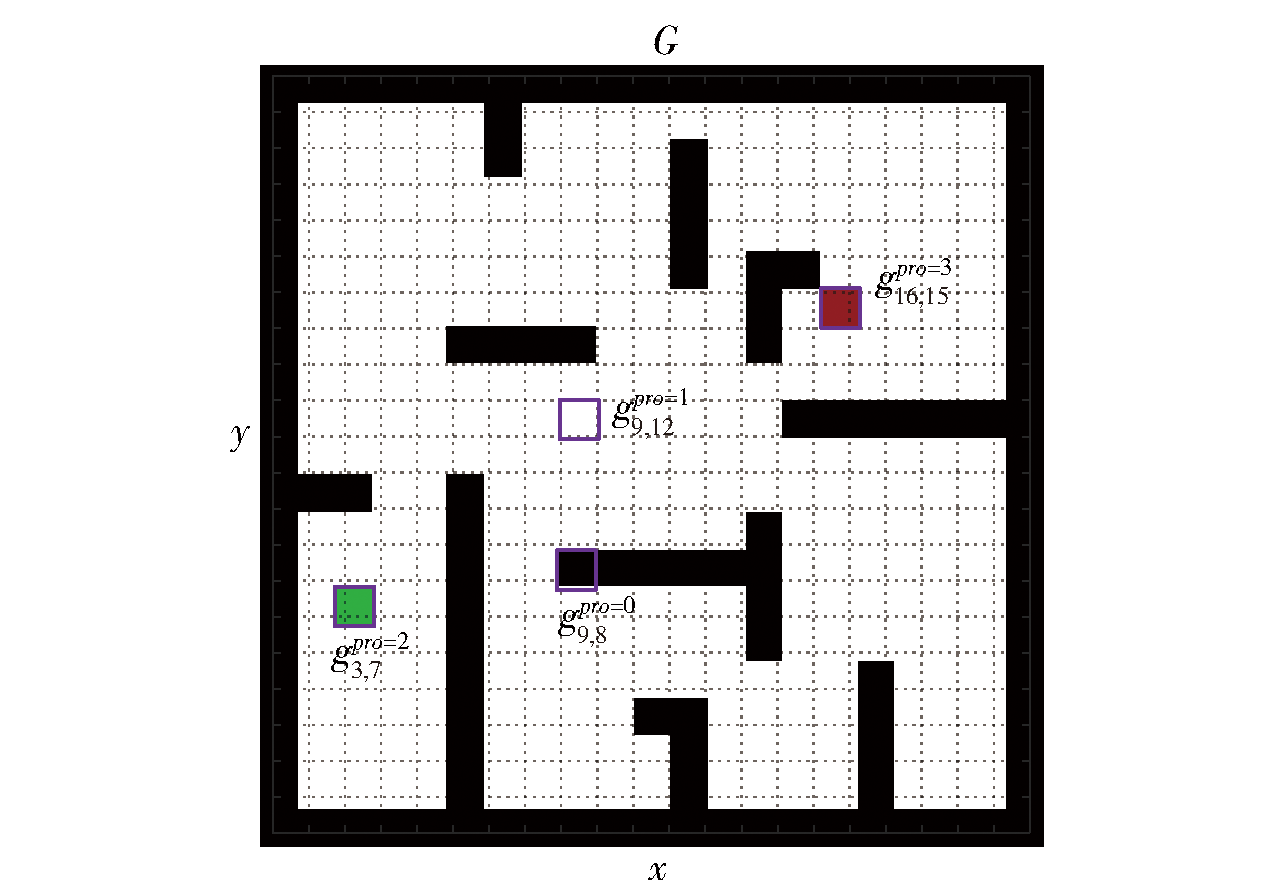
Fig.1 Grid-based map

Fig.2 Logical diagram of hierarchical search structure

Fig.3 State space of UAV swarms

Fig.4 Design of network

Fig.5 Limitations of the classic JPS algorithm for UAV swarm path planning
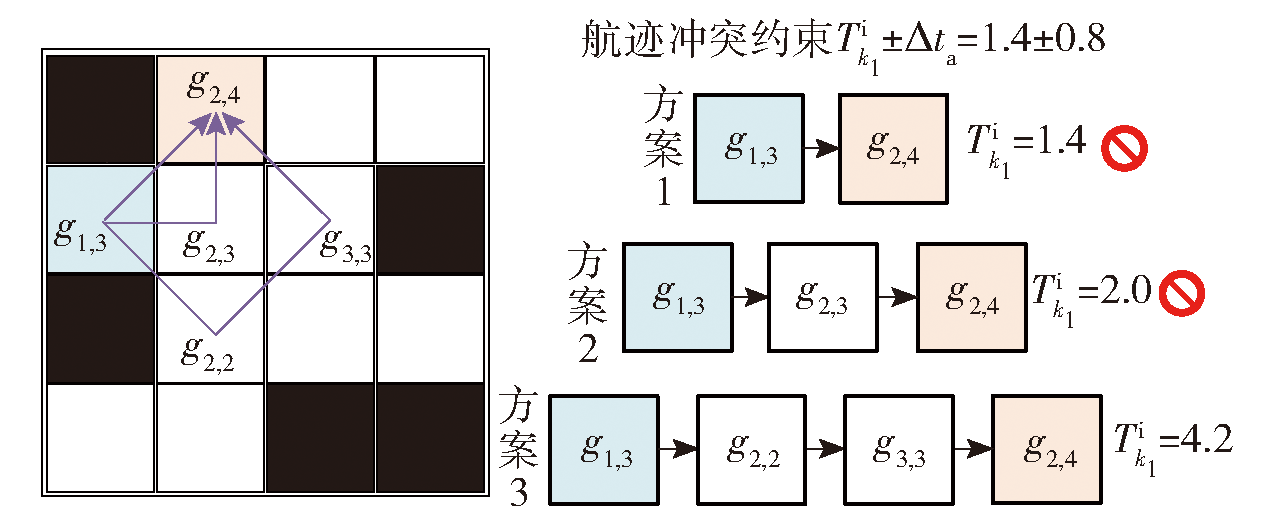
Fig.6 Schematic diagram of node re-expansion plan
| 算法:基于节点重扩展机制的跳点搜索法 |
|---|
| Input: , ,Cnow,Con, Open, Close |
| Output: ξi={ , ,…, },k∈Z+ |
| 1 Get positiong , ; |
| 2 Initialize Cnow,Con, Open, Close; |
| 3 While Open≠Ø do |
| 4 Find gxy=min(Open) |
| 5 Do prune rules:Flag=1 |
| 6 while gxy expands no jump point‖ jump point in Con |
| 7 If gxy reach boundary |
| 8 Flag=0; |
| 9 Break; |
| 10 else |
| 11 gxy=diagonal search gxy |
| 12 End if |
| 13 End while |
| 14 If Flag |
| 15 gxy from Open to Close, jump point in Open |
| 16 End if |
| 17 If gxy == |
| 18 Return ξi={ , ,…, },k∈Z+ |
| 19 End if |
| 20 End while |
Table 1 Pseudocode of algorithm
| 算法:基于节点重扩展机制的跳点搜索法 |
|---|
| Input: , ,Cnow,Con, Open, Close |
| Output: ξi={ , ,…, },k∈Z+ |
| 1 Get positiong , ; |
| 2 Initialize Cnow,Con, Open, Close; |
| 3 While Open≠Ø do |
| 4 Find gxy=min(Open) |
| 5 Do prune rules:Flag=1 |
| 6 while gxy expands no jump point‖ jump point in Con |
| 7 If gxy reach boundary |
| 8 Flag=0; |
| 9 Break; |
| 10 else |
| 11 gxy=diagonal search gxy |
| 12 End if |
| 13 End while |
| 14 If Flag |
| 15 gxy from Open to Close, jump point in Open |
| 16 End if |
| 17 If gxy == |
| 18 Return ξi={ , ,…, },k∈Z+ |
| 19 End if |
| 20 End while |
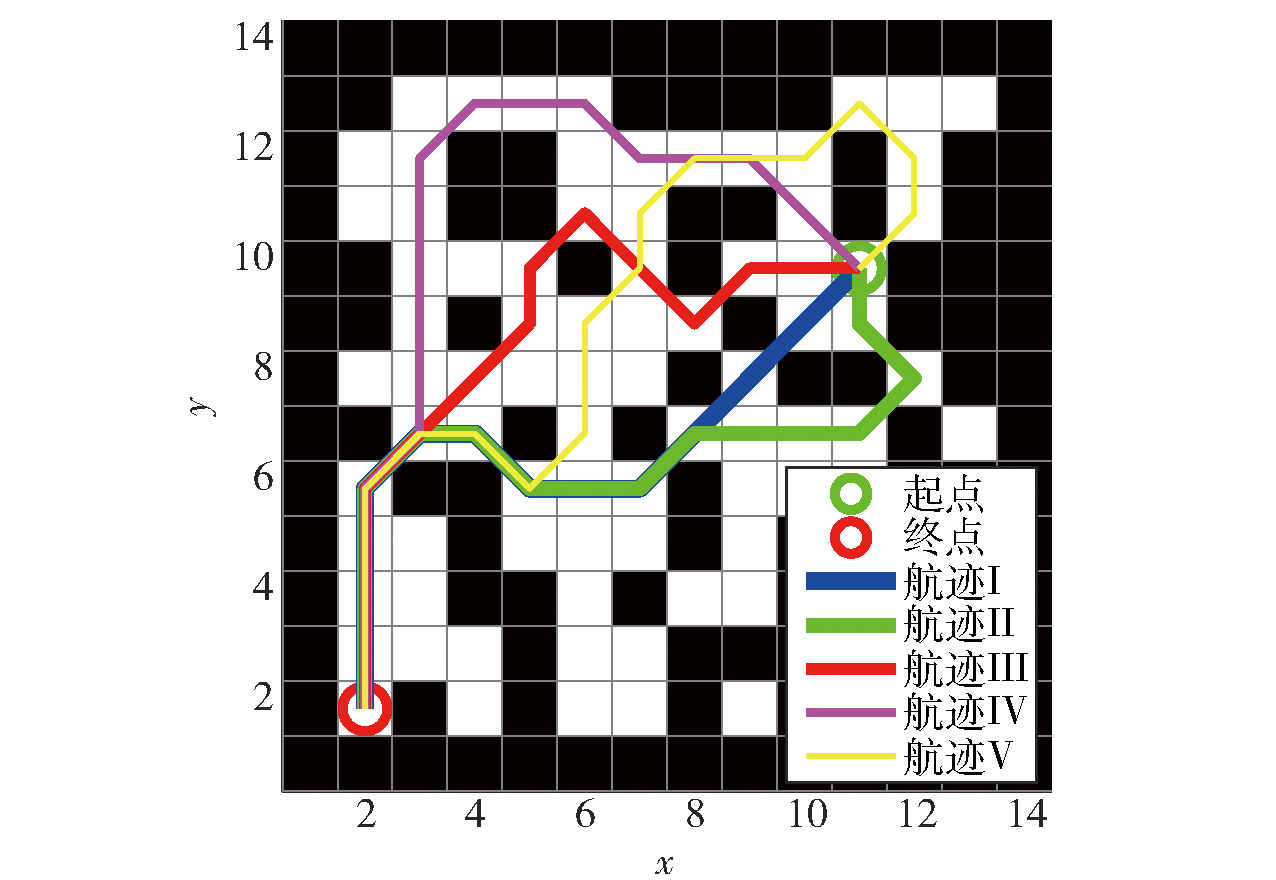
Fig.7 Illustration of ReJPS algorithm for avoiding path conflicts
| 航迹冲突坐标 | 无人机到达时间 | |||||||
|---|---|---|---|---|---|---|---|---|
| (8, 7) | u1 | u2 | ||||||
| 4.24 | 5.83 | |||||||
| (9, 12) | u4 | u5 | ||||||
| 2.83 | 6.24 | |||||||
| (7, 10) | u3 | u5 | ||||||
| 4.83 | 9.66 | |||||||
| (5, 6) | u1 | u2 | u5 | |||||
| 7.65 | 9.24 | 14.49 | ||||||
| (3, 7) | u1 | u2 | u3 | u4 | u5 | |||
| 10.07 | 12.66 | 11.49 | 14.66 | 16.90 | ||||
Table 2 Conflict detection
| 航迹冲突坐标 | 无人机到达时间 | |||||||
|---|---|---|---|---|---|---|---|---|
| (8, 7) | u1 | u2 | ||||||
| 4.24 | 5.83 | |||||||
| (9, 12) | u4 | u5 | ||||||
| 2.83 | 6.24 | |||||||
| (7, 10) | u3 | u5 | ||||||
| 4.83 | 9.66 | |||||||
| (5, 6) | u1 | u2 | u5 | |||||
| 7.65 | 9.24 | 14.49 | ||||||
| (3, 7) | u1 | u2 | u3 | u4 | u5 | |||
| 10.07 | 12.66 | 11.49 | 14.66 | 16.90 | ||||
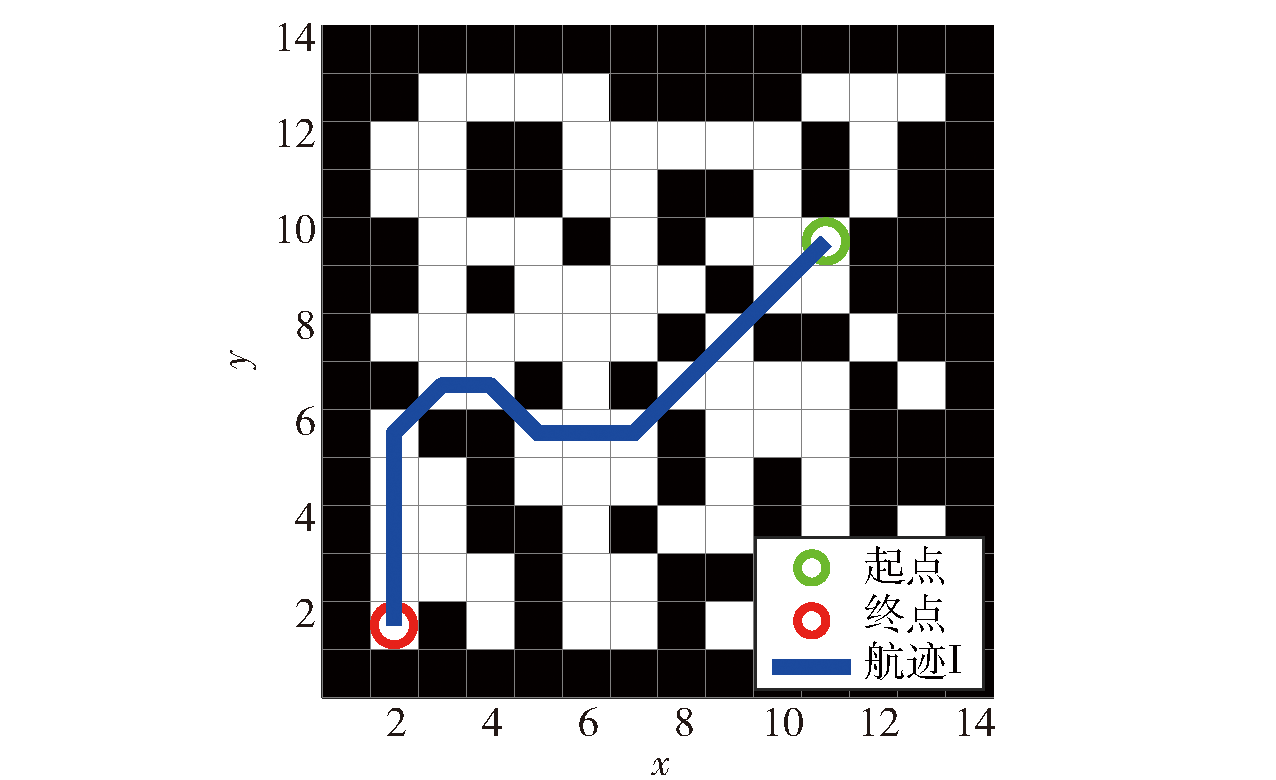
Fig.8 Illustration of JPS algorithm for avoiding path conflicts

Fig.9 Feasible solution space of path planning
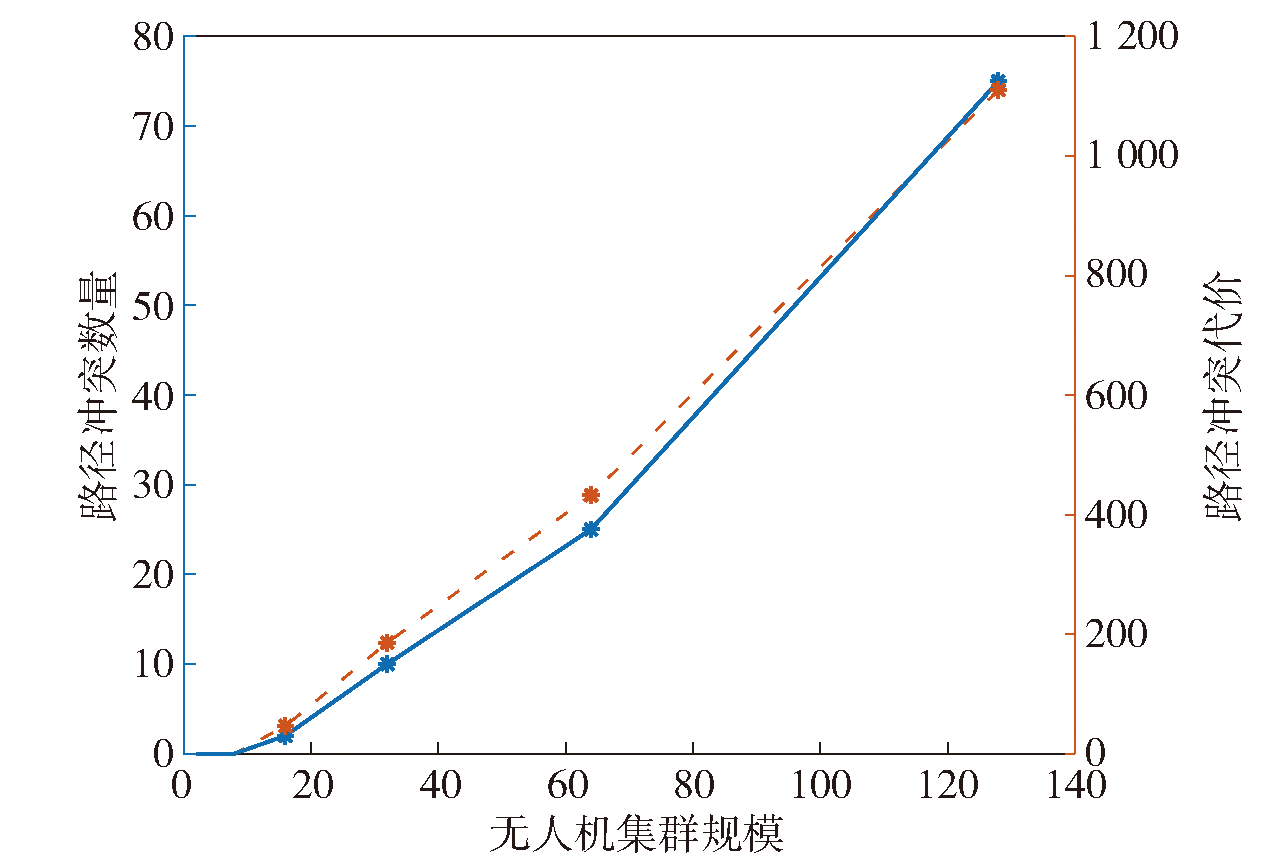
Fig.10 Initial number and cost of path conflict for UAV swarms with different scales
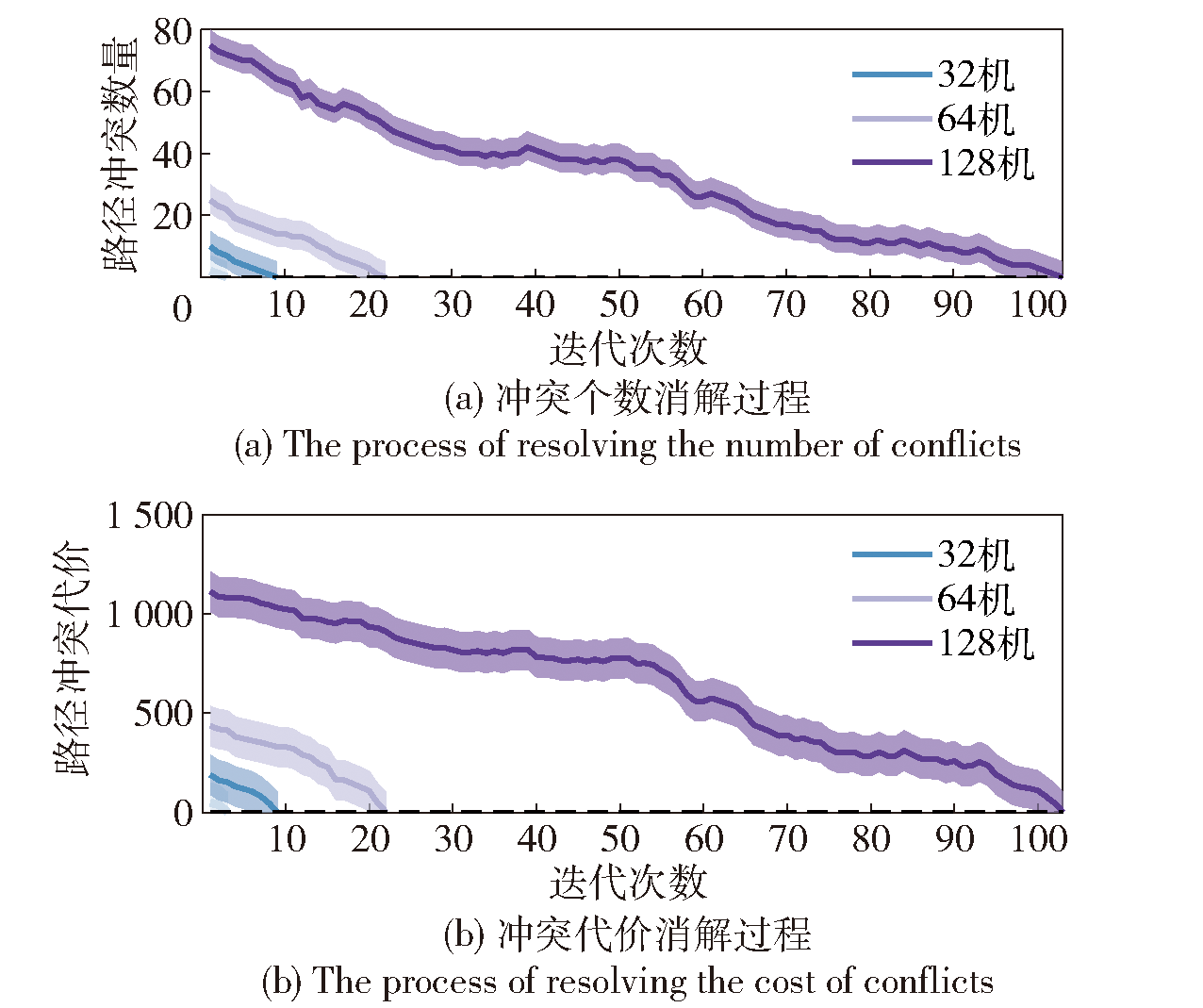
Fig.11 Deconfliction of UAV swarms with different scales
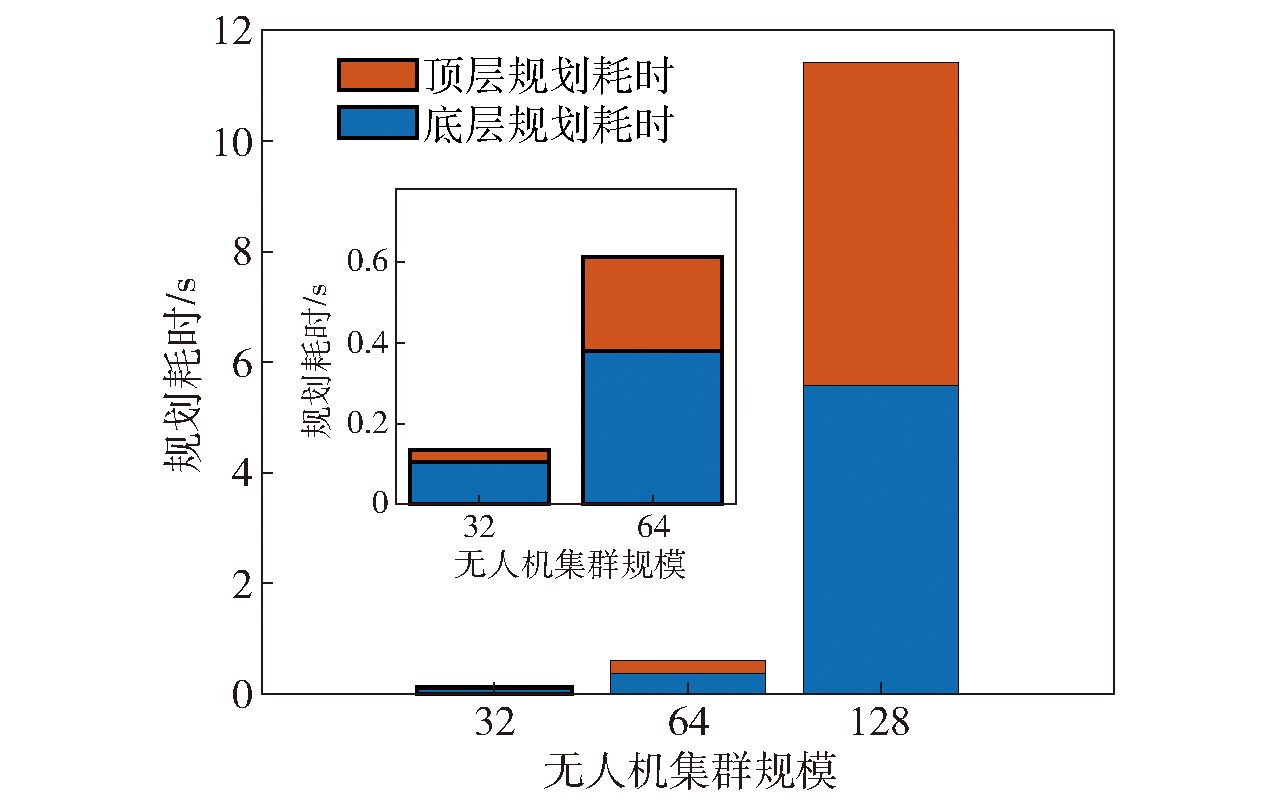
Fig.12 Deconfliction time of UAV swarms with different scales
| 对比方法 | 顶层规划方法 | 底层规划方法 |
|---|---|---|
| 1 | CBS | A* |
| 2 | CBS | MSA* |
| 3 | CBS | ReJPS |
| 4 | DRLCBS | ReJPS |
Table 3 Different methods in Monte Carlo simulation
| 对比方法 | 顶层规划方法 | 底层规划方法 |
|---|---|---|
| 1 | CBS | A* |
| 2 | CBS | MSA* |
| 3 | CBS | ReJPS |
| 4 | DRLCBS | ReJPS |
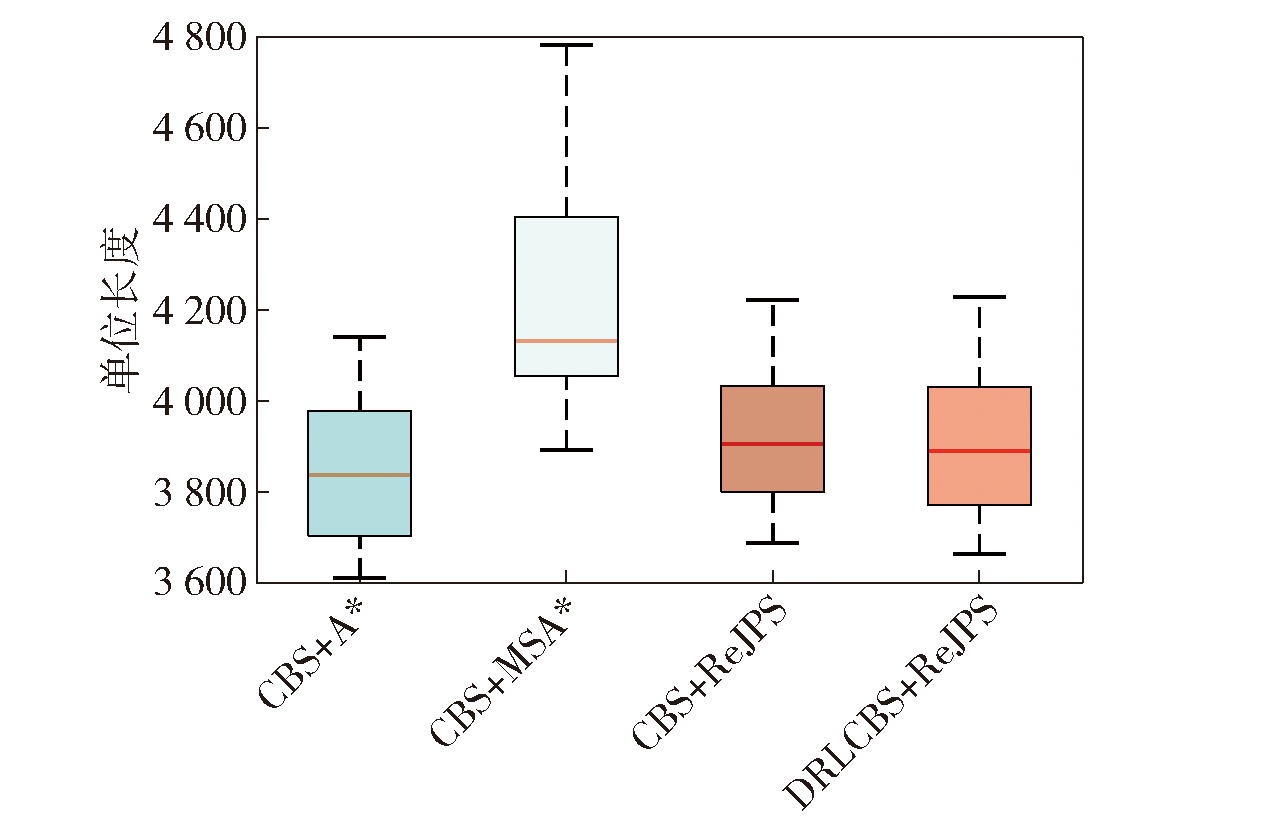
Fig.13 Comparison of flight times

Fig.14 Comparison of planning times
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
陈亚萍, 王楠, 洪华杰, 等. 面向多无人平台区域监视任务的信息素正向激励栅格方法[J]. 兵工学报, 2023, 44(9):2859-2870.
doi: 10.12382/bgxb.2022.0537 |
|
doi: 10.12382/bgxb.2022.0537 |
|
| [5] |
|
| [6] |
李军, 陈士超. 无人机蜂群关键技术发展综述[J]. 兵工学报, 2023, 44(9):2533-2545.
doi: 10.12382/bgxb.2023.0514 |
|
doi: 10.12382/bgxb.2023.0514 |
|
| [7] |
赵军民, 何浩哲, 王少奇, 等. 复杂环境下多无人机目标跟踪与避障联合航迹规划[J]. 兵工学报, 2023, 44(9):2685-2696.
doi: 10.12382/bgxb.2022.0525 |
|
doi: 10.12382/bgxb.2022.0525 |
|
| [8] |
于连波, 曹品钊, 石亮, 等. 基于改进冲突搜索的多智能体路径规划算法[J]. 航空学报, 2023, 44(增刊1):727648.
|
|
|
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
徐广通, 王祝, 曹严, 等. 动态优先级解耦的无人机集群轨迹分布式序列凸规划[J]. 航空学报, 2022, 43(2):325059.
doi: 10.7527/S1000-6893.2021.25059 |
|
doi: 10.7527/S1000-6893.2021.25059 |
|
| [14] |
|
| [15] |
|
| [16] |
王子晗, 童向荣. 基于冲突搜索的多智能体路径规划研究进展[J]. 计算机科学, 2023, 50(6):358-368.
doi: 10.11896/jsjkx.220800151 |
|
doi: 10.11896/jsjkx.220800151 |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
周熙栋, 张辉, 陈波. 非结构化场景下基于改进JPS算法的移动机器人路径规划[J]. 控制与决策, 2024, 39(2):474-482.
|
|
|
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
pmid: 22392705 |
| [26] |
|
| [1] | LU Xiaoran, ZOU Yuan, ZHANG Xudong, SUN Wei, MENG Yihao, ZHANG Bin. Energy Management Strategy Optimized by Munchausen-PER-DDQN for Hybrid Tracked Vehicle [J]. Acta Armamentarii, 2025, 46(6): 240498-. |
| [2] | WANG Yitao, WANG Junsen, SHI Zhangsong, XU Huihui, ZHU Weiming. Task Allocation for Multi-agent System Based on Extended Rapidly-exploring Random Tree and Contract Net [J]. Acta Armamentarii, 2025, 46(5): 240743-. |
| [3] | XIAN Sujie, WANG Kang, ZENG Xin, SONG Jie, WU Zhilin. An Impact Angle and Field of View Constraints Guidance Law Based on Deep Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(4): 240435-. |
| [4] | PAN Yunwei, LI Min, ZENG Xiangguang, HUANG Ao, ZHANG Jiaheng, REN Wenzhe, PENG Bei. AUV Obstacle Avoidance and Path Planning Based on Artificial Potential Field and Improved Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(4): 240300-. |
| [5] | ZENG Zhaoyang, PENG Wensheng, LI Yunkai, XU Ming. Connotation,Development and Challenges of Reliability Technology of Intelligent UAV Swarm [J]. Acta Armamentarii, 2025, 46(3): 240322-. |
| [6] | LI Zonggang, HAN Sen, CHEN Yinjuan, NING Xiaogang. A Path Planning Algorithm for Mobile Robots Based on Angle Searching and Deep Q-Network [J]. Acta Armamentarii, 2025, 46(2): 240265-. |
| [7] | HU Mingzhe, LI Xuguang, REN Zhiying, ZENG Shuai. UAV 3D Path Planning Based on A* Algorithm with Improved Heuristic Function [J]. Acta Armamentarii, 2024, 45(S1): 302-307. |
| [8] | SUN Hao, LI Haiqing, LIANG Yan, MA Chaoxiong, WU Han. Dynamic Penetration Decision of Loitering Munition Group Based on Knowledge-assisted Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(9): 3161-3176. |
| [9] | PAN Zishuang, SU Xichao, HAN Wei, LIU Wenlin, YU Dazhao, WANG Jie. Cooperative Combat Coalition Formation of Heterogeneous UAV Swarm Based on Dynamic Consensus-based Grouping Algorithm [J]. Acta Armamentarii, 2024, 45(9): 3177-3190. |
| [10] | NIU Yilong, YANG Yi, ZHANG Kai, MU Ying, WANG Qi, WANG Yingmin. Path Planning Method for Unmanned Surface Vessel in On-call Submarine Search Based on Improved DQN Algorithm [J]. Acta Armamentarii, 2024, 45(9): 3204-3215. |
| [11] | TIAN Hongqing, MA Mingtao, ZHANG Bo, ZHENG Xunjia. Potential Field Exploring Tree Path Planning for Intelligent Vehicle in Off-road Environment [J]. Acta Armamentarii, 2024, 45(7): 2110-2127. |
| [12] | JI Peng, GUO Minghao. Local Path Planning for Unmanned Ground Vehicles Based on Improved Artificial Potential Field Method in Frenet Coordinate System [J]. Acta Armamentarii, 2024, 45(7): 2097-2109. |
| [13] | WANG Xiaolong, CHEN Yang, HU Mian, LI Xudong. Robot Path Planning for Persistent Monitoring Based on Improved Deep Q Networks [J]. Acta Armamentarii, 2024, 45(6): 1813-1823. |
| [14] | PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [15] | LOU Shuhan, WANG Chongchong, GONG Wei, DENG Liyuan, LI Li. Collaborative Regional Information Collection Strategy Based on MLAT-DRL Algorithm [J]. Acta Armamentarii, 2024, 45(12): 4423-4434. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||