
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (1): 231104-.doi: 10.12382/bgxb.2023.1104
Previous Articles Next Articles
ZHONG Yue1,*( ), XU Feng1, YAN Mengfei1, LIU Yile2
), XU Feng1, YAN Mengfei1, LIU Yile2
Received:2024-07-03
Online:2024-12-07
Contact:
ZHONG Yue
CLC Number:
ZHONG Yue, XU Feng, YAN Mengfei, LIU Yile. An Evaluation Method of Vehicle Handling Consistency Based on Improved DTW Algorithm[J]. Acta Armamentarii, 2025, 46(1): 231104-.
Add to citation manager EndNote|Ris|BibTeX
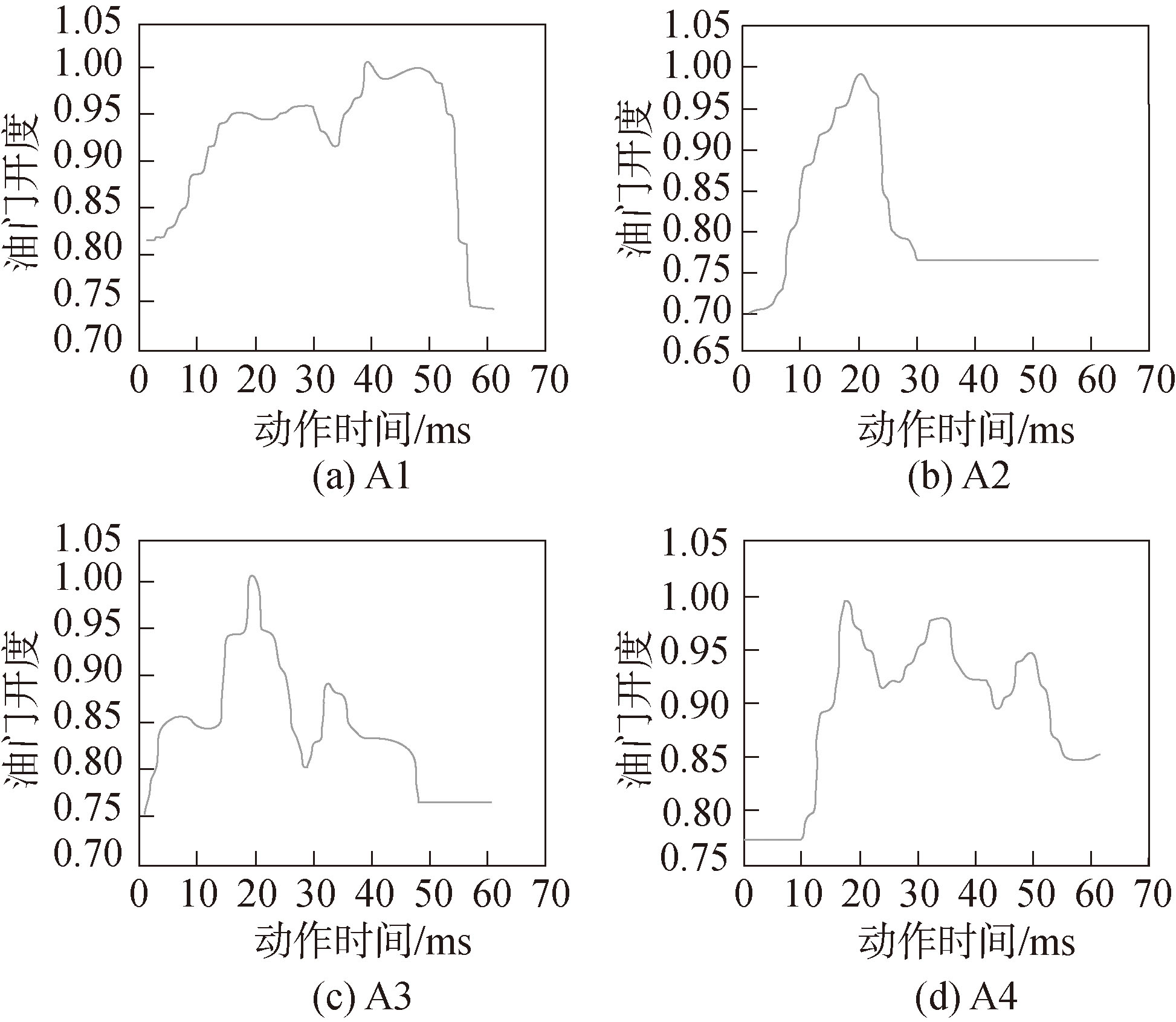
Fig.1 Throttle action curve of vehicle A

Fig.2 Throttle action curve of vehicle B
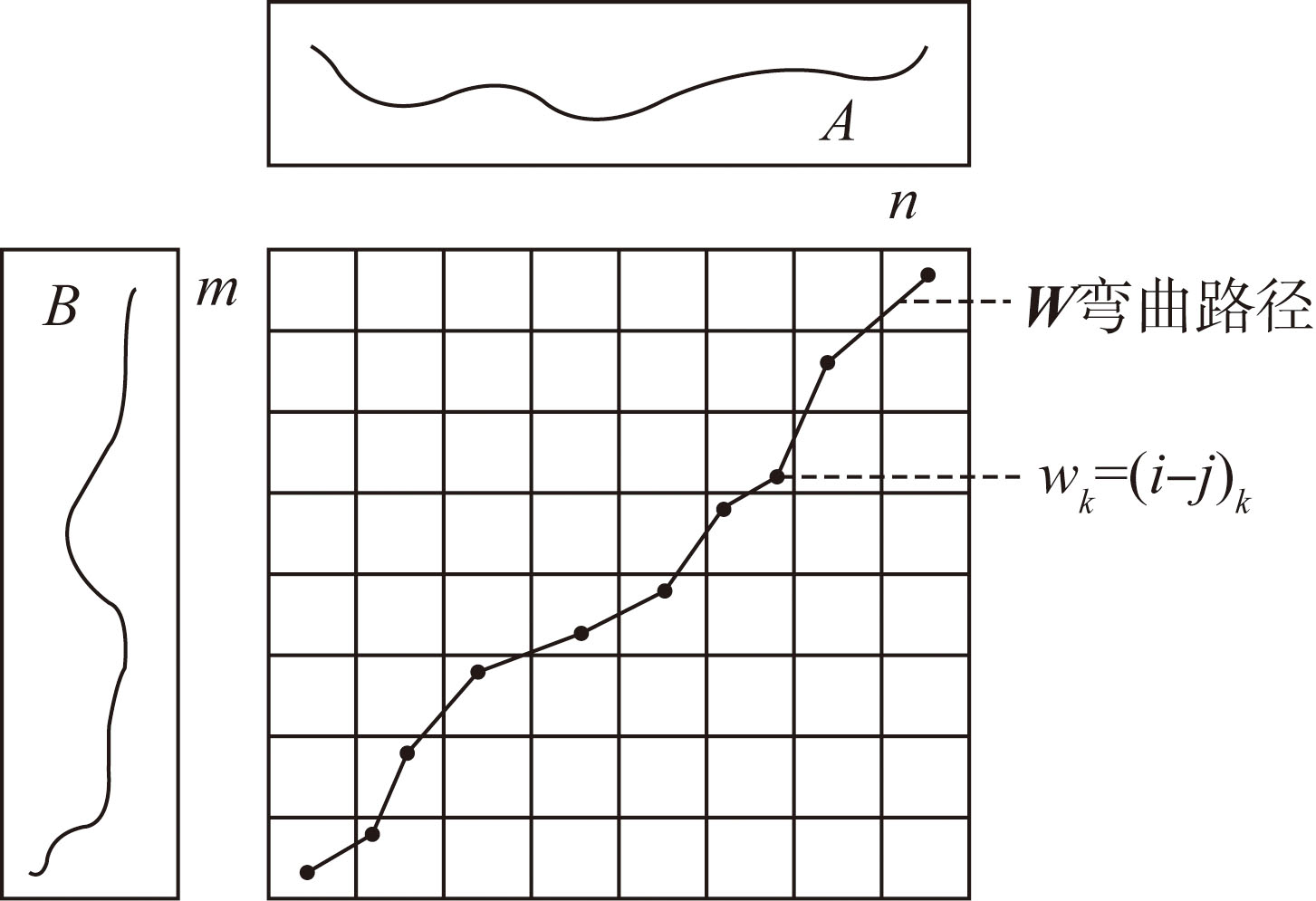
Fig.3 Dynamic bending distance path diagram
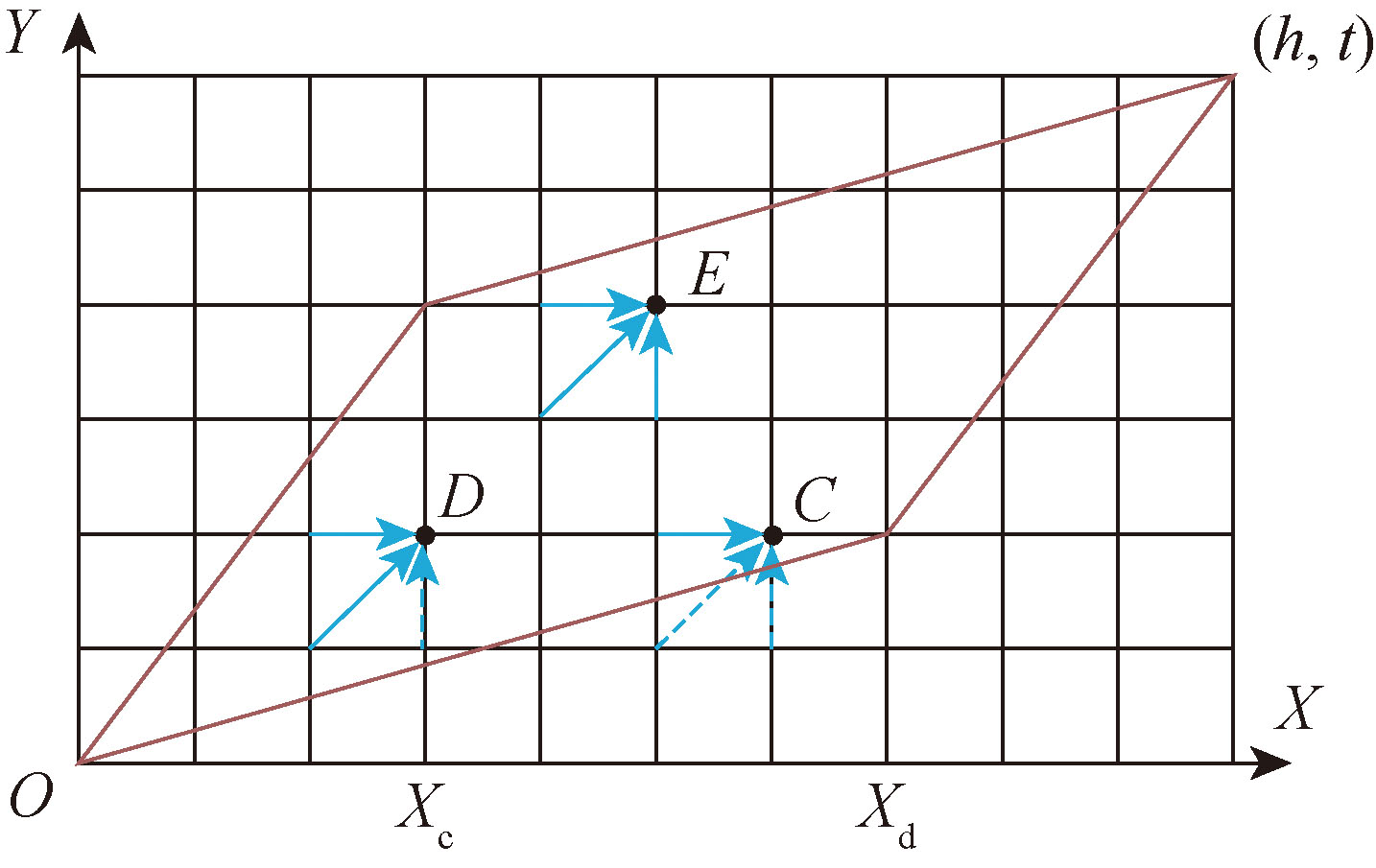
Fig.4 DTW parallelogram search area
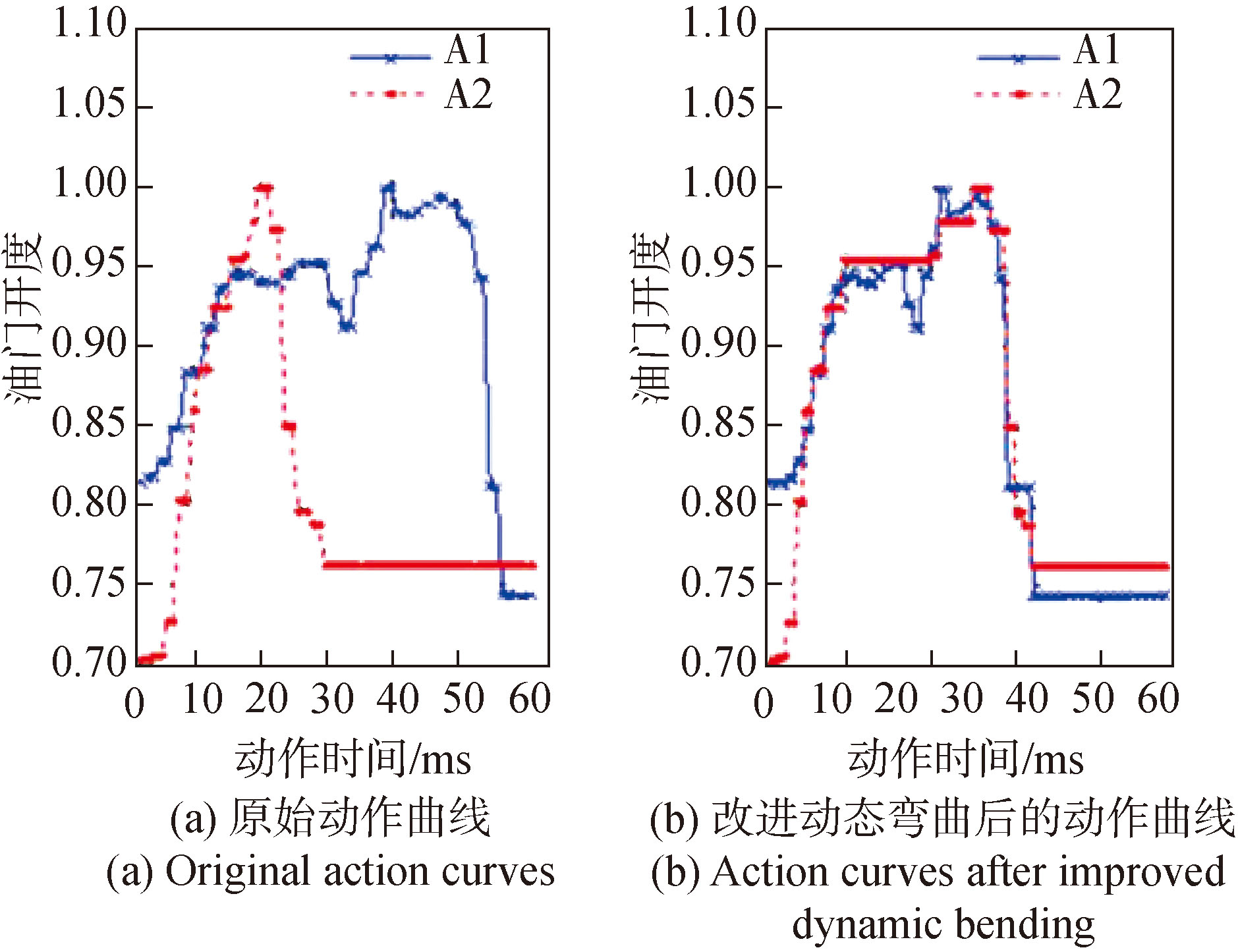
Fig.5 Original action curves of Groups A1 and A2 and their action curves after improved dynamic bending
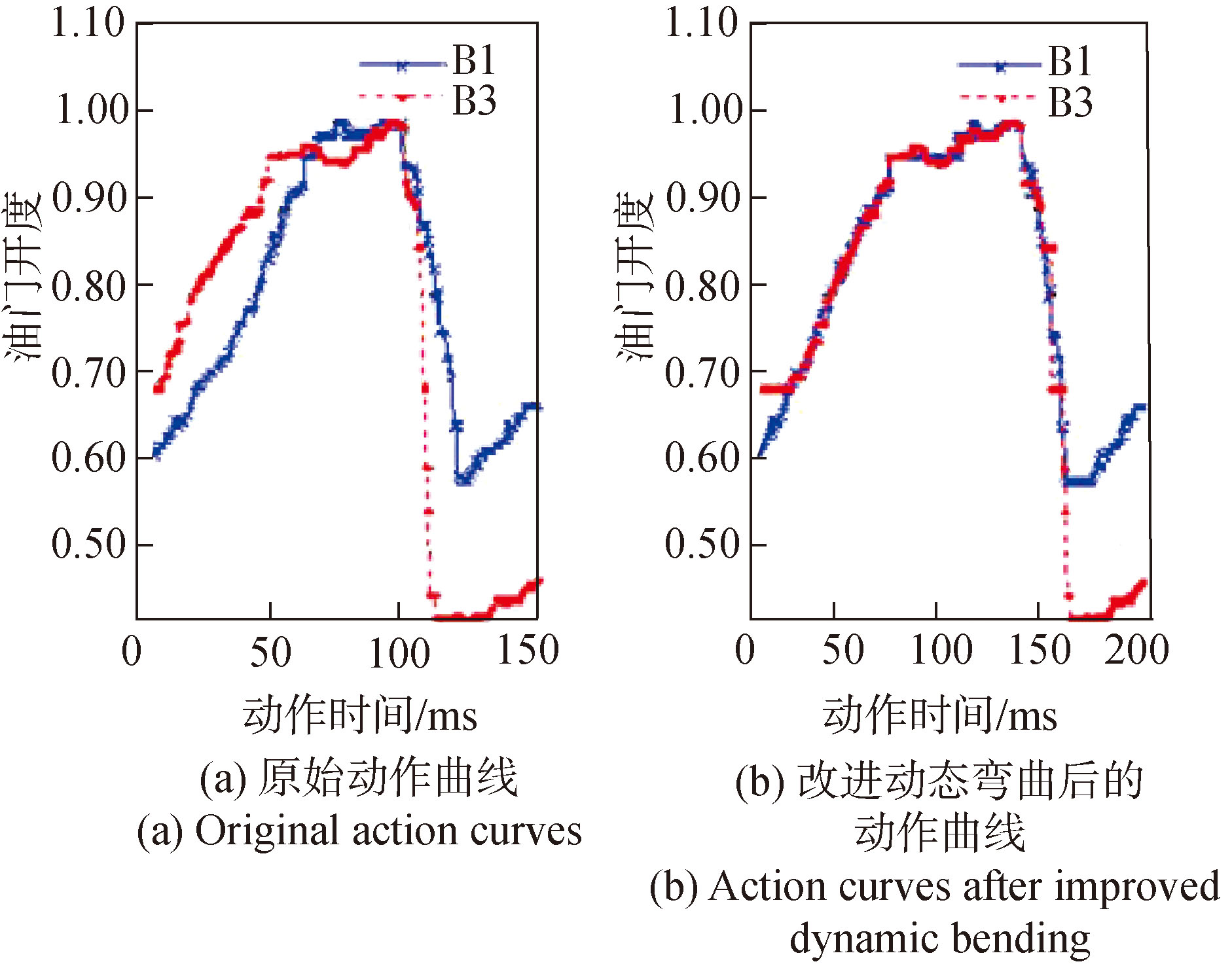
Fig.6 Raw data and DTW distances of Groups B1 and B3 action curves
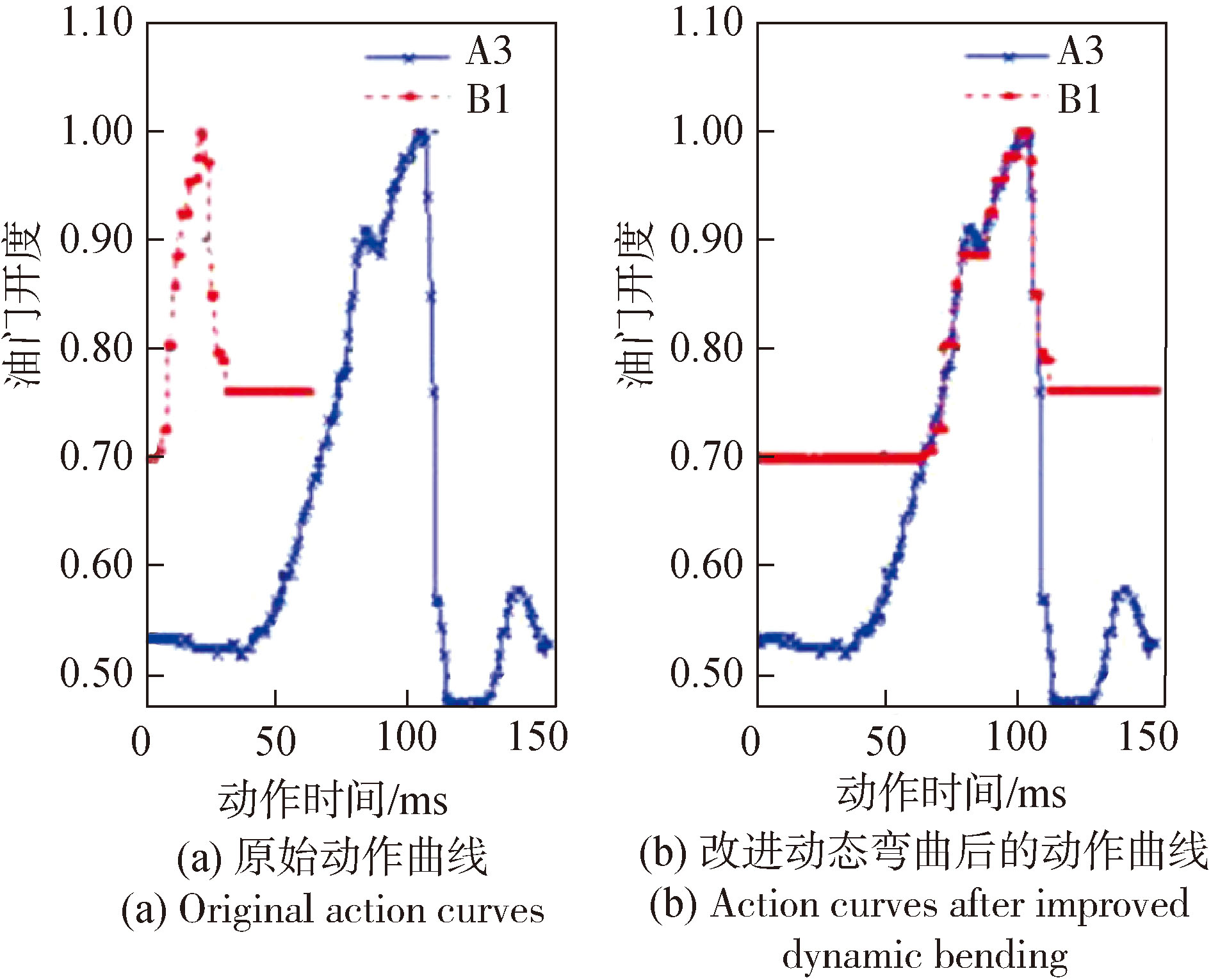
Fig.7 Raw data and DTW distances of Groups A3 and B1 action curves
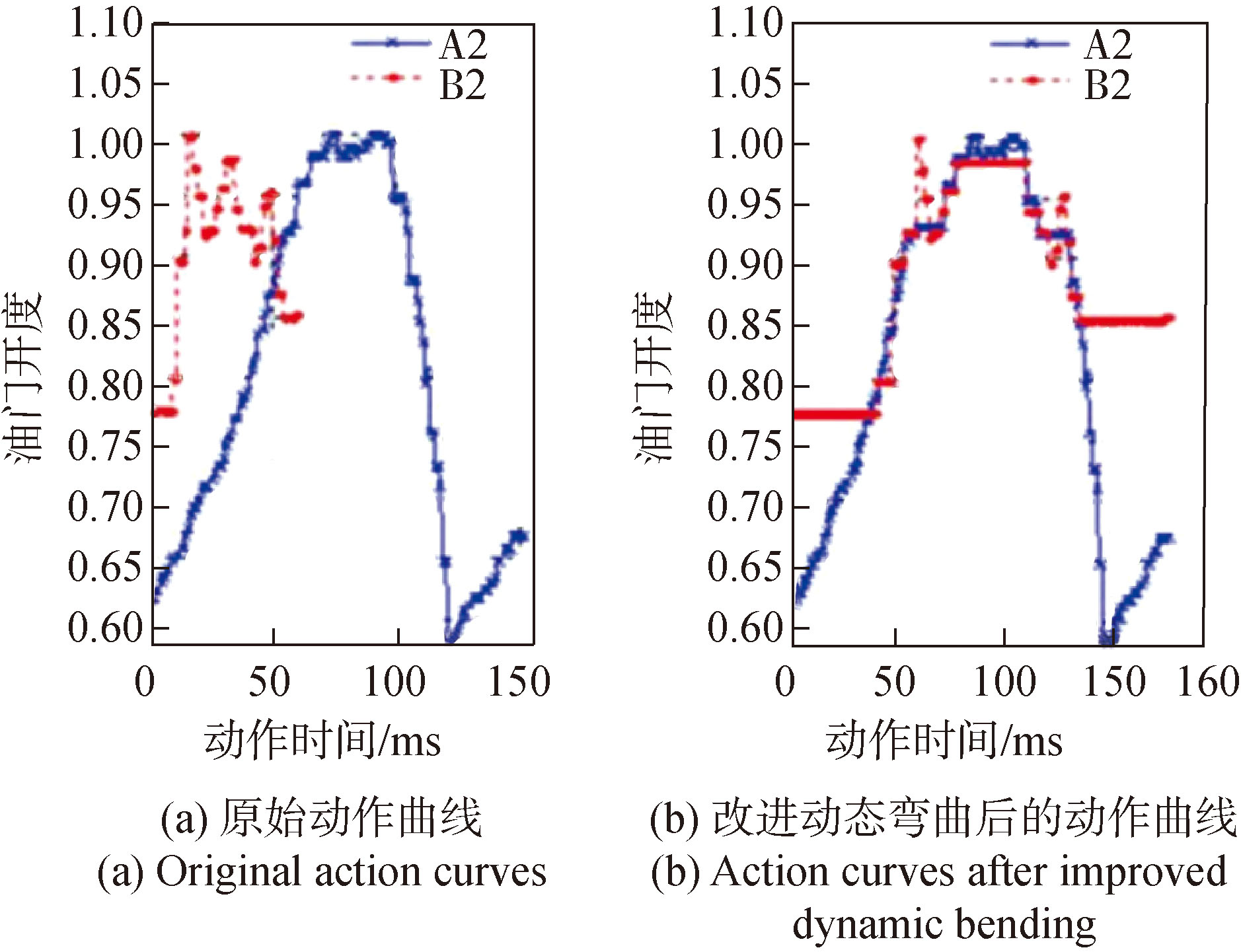
Fig.8 Raw data and DTW distances of Groups A2 and B2 action curves
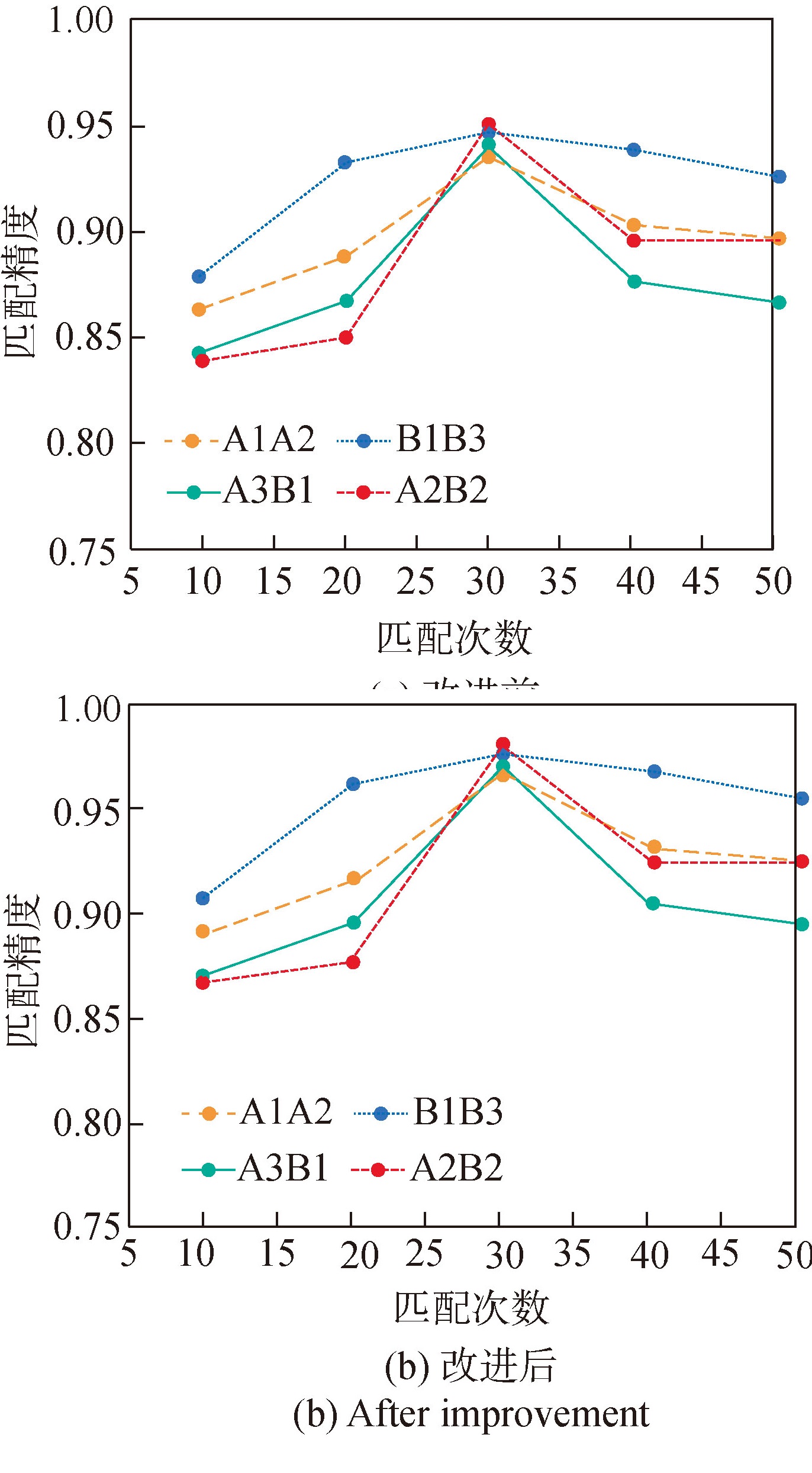
Fig.9 Comparison of matching accuracies before and after DTW improvement
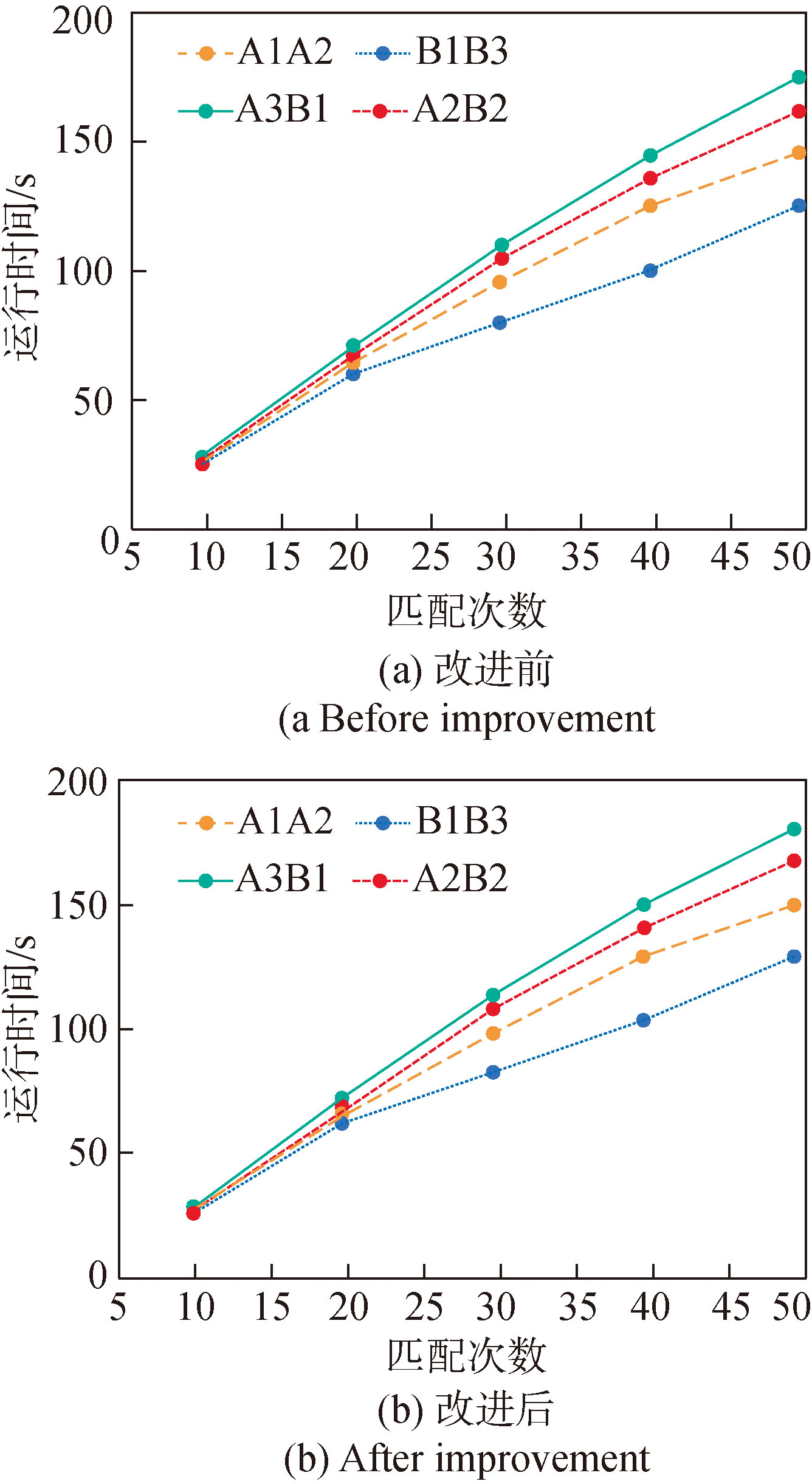
Fig.10 Comparison of matching times before and after DTW improvement
| 匹配算法 | 平均匹配精度 | |||
|---|---|---|---|---|
| A1A2 | B1B3 | A3B1 | A2B2 | |
| DTW | 0.866 | 0.876 | 0.844 | 0.85 |
| 分段式DTW | 0.894 | 0.912 | 0.88 | 0.882 |
Table 1 The matching accuracies of DTW algorithm before and after improvement
| 匹配算法 | 平均匹配精度 | |||
|---|---|---|---|---|
| A1A2 | B1B3 | A3B1 | A2B2 | |
| DTW | 0.866 | 0.876 | 0.844 | 0.85 |
| 分段式DTW | 0.894 | 0.912 | 0.88 | 0.882 |
| 匹配算法 | 平均匹配时间/s | |||
|---|---|---|---|---|
| A1A2 | B1B3 | A3B1 | A2B2 | |
| DTW | 96.48 | 79.88 | 126.86 | 119.9 |
| 分段式DTW | 89.5 | 76.46 | 105.36 | 98.46 |
Table 2 The matching times of DTW algorithm before and after improvement
| 匹配算法 | 平均匹配时间/s | |||
|---|---|---|---|---|
| A1A2 | B1B3 | A3B1 | A2B2 | |
| DTW | 96.48 | 79.88 | 126.86 | 119.9 |
| 分段式DTW | 89.5 | 76.46 | 105.36 | 98.46 |
| 曲线编号 | A1 | A2 | A3 | A4 | B1 | B2 | B3 | B4 |
|---|---|---|---|---|---|---|---|---|
| A1 | 0 | A组曲线的平均DTW距离:21.761 B组曲线的平均DTW距离:2.547 AB曲线的平均DTW距离:26.692 | ||||||
| A2 | 9.382 | 0 | ||||||
| A3 | 9.544 | 12.734 | 0 | |||||
| A4 | 38.835 | 36.698 | 23.374 | 0 | ||||
| B1 | 9.76 | 27.777 | 15.559 | 52.053 | 0 | |||
| B2 | 6.6019 | 20.42 | 15.297 | 52.633 | 2.104 | 0 | ||
| B3 | 8.2896 | 24.6453 | 16.960 | 53.585 | 1.757 | 1.375 | 0 | |
| B4 | 12.439 | 29.7243 | 20.105 | 61.220 | 2.116 | 4.669 | 3.260 | 0 |
Table 3 DTW distances between the throttle actions of two vehicles
| 曲线编号 | A1 | A2 | A3 | A4 | B1 | B2 | B3 | B4 |
|---|---|---|---|---|---|---|---|---|
| A1 | 0 | A组曲线的平均DTW距离:21.761 B组曲线的平均DTW距离:2.547 AB曲线的平均DTW距离:26.692 | ||||||
| A2 | 9.382 | 0 | ||||||
| A3 | 9.544 | 12.734 | 0 | |||||
| A4 | 38.835 | 36.698 | 23.374 | 0 | ||||
| B1 | 9.76 | 27.777 | 15.559 | 52.053 | 0 | |||
| B2 | 6.6019 | 20.42 | 15.297 | 52.633 | 2.104 | 0 | ||
| B3 | 8.2896 | 24.6453 | 16.960 | 53.585 | 1.757 | 1.375 | 0 | |
| B4 | 12.439 | 29.7243 | 20.105 | 61.220 | 2.116 | 4.669 | 3.260 | 0 |
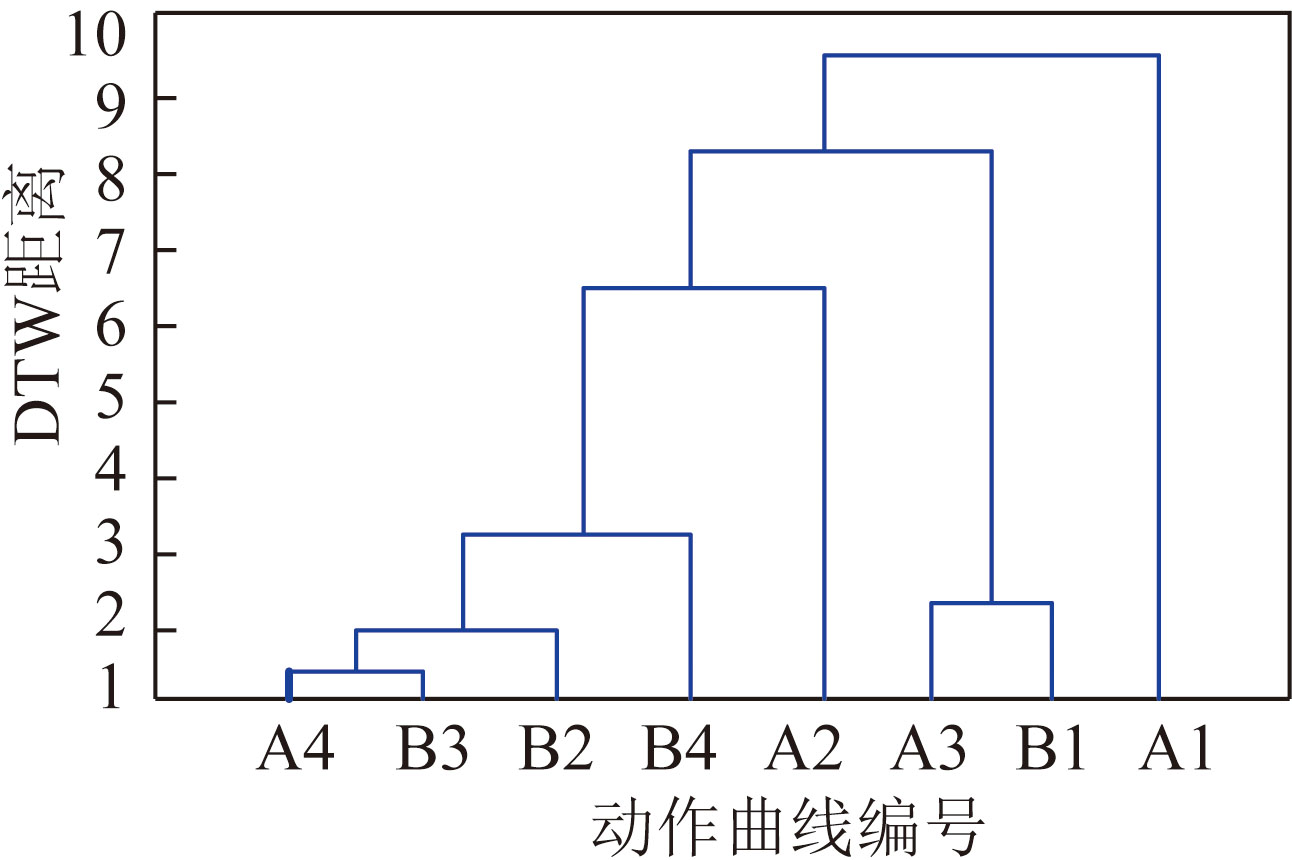
Fig.11 DTW distance clustering spectrum of throttle action curve
| [1] |
|
| [2] |
|
| [3] |
ISO 17288-2: 2004.Passenger cars-free-steer behaviour-Part2:steer-pulse open-loop test method[S]. Geneva, Switzerland: International Organization for Standardization,2004.
|
| [4] |
ISO 3888-1:1999.Passenger cars-test track for a severe lane-change manoeuvre Part1:double-lane change[S]. Geneva, Switzerland: International Organization for Standardization,1999.
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
程前, 李建良. 基于改进动态时间规整的相似性度量及轨迹聚类[J]. 电子测量技术, 2021, 44(23):1-5.
|
|
|
|
| [15] |
邓青, 薛青, 罗佳. 基于支持向量机的坦克驾驶模拟训练结果分析[J]. 兵工学报, 2019, 40(9):1953-1960.
doi: 10.3969/j.issn.1000-1093.2019.09.021 |
|
doi: 10.3969/j.issn.1000-1093.2019.09.021 |
|
| [16] |
|
| [17] |
郭沐锋, 彭文成, 李平华. 某型坦克驾驶教练车在役考核指标体系研究[J]. 工程与试验, 2022, 62(3):40-42.
|
|
|
|
| [18] |
郭孔辉, 金凌鸽, 曹宇, 等. 车辆操纵稳定性客观评价指标的降维处理[J]. 汽车技术, 2010(2):1-4.
|
|
|
|
| [19] |
刘义乐, 刘峻岩. 坦克驾驶协同动作模式表示与匹配方法[J]. 装甲兵工程学院学报, 2019, 33(3):63-67.
|
|
|
|
| [20] |
|
| [21] |
龚诗雄, 王旭, 孔国杰, 等. 多车协同目标跟踪方法[J]. 兵工学报, 2022, 43(10):2429-2442.
|
|
doi: 10.12382/bgxb.2021.0462 |
|
| [22] |
|
| [23] |
李正欣, 张凤鸣, 李克武, 等. 一种支持DTW距离的多元时间序列索引结构[J]. 软件学报, 2014, 25(3):560-575.
|
|
|
|
| [24] |
|
| [25] |
刘美, 王全民. 基于DTW的时间序列相似度量方法的优化[J]. 计算机与数字工程, 2023, 51(4):814-819,938.
|
|
|
|
| [26] |
杨雄, 郭佳豪, 方鑫, 等. 基于改进动态时间规整算法的终端波形比对方法[J]. 电子测量技术, 2023, 46(6):178-184.
|
|
|
|
| [27] |
陈乾, 胡谷雨. 一种新的DTW最佳弯曲窗口学习方法[J]. 计算机科学, 2012, 39(8):191-195.
|
|
|
|
| [28] |
朱洪涛, 李姗, 肖勇, 等. 基于动态时间弯曲的轨道波形匹配方法[J]. 振动与冲击, 2018, 37(11):246-251.
|
|
|
|
| [29] |
杨靖. 基于动态时间弯曲的时间序列相似性搜索技术的研究[D]. 哈尔滨: 哈尔滨工业大学, 2015.
|
|
|
|
| [30] |
|
| [31] |
|
| [32] |
夏磊. 基于行为识别匹配的用户日常运动检测[J]. 计算机测量与控制, 2018, 26(2):264-267.
|
|
|
|
| [33] |
马晓蒙. 基于DTW模板匹配的外骨骼机器人步态识别与预测研究[D]. 武汉: 武汉理工大学, 2019.
|
|
|
|
| [34] |
|
| [35] |
崔文锋. 智能汽车综合纵向控制的统一驾驶员模型研究[D]. 长春: 吉林大学, 2018.
|
|
|
|
| [36] |
|
| [37] |
|
| [38] |
|
| [1] | ZHANG Xinze, XIAO Haijian, LIU Xinglong, XING Kongrui, LU Xiang. Design and Realization of a Ducted Fan Water-air Amphibious UAV [J]. Acta Armamentarii, 2025, 46(1): 231172-. |
| [2] | XIAO Yang, SU Bo, JI Chao, YANG Dezhen, ZHOU Tong. System Safety Analysis of Unmanned Ground Vehicles Based on STPA Method and Bow-Tie Model [J]. Acta Armamentarii, 2024, 45(S2): 153-161. |
| [3] | DU Yunsheng, WANG Wenshuo, WEI Yuan, CHEN Huiyan. Modeling and Prediction of Driver’s Steering Control Behavior for Stepless Steering Tracked Vehicle [J]. Acta Armamentarii, 2024, 45(S2): 162-169. |
| [4] | LIU Qihui, WU Wei, PAN Feng. Skid-steering Wheeled Vehicle Model Coupled with HydraulicDrive system and Its Dynamic Characteristics [J]. Acta Armamentarii, 2024, 45(S2): 222-230. |
| [5] | YANG Ziao, QU Qifu, SUN Haiwen, LI Ye, JI Zhentao. Inertial-based Deep-coupling Navigation Method with Embedded Flight Dynamics [J]. Acta Armamentarii, 2024, 45(S2): 240-250. |
| [6] | LI Dan, YU Shaozhen, YANG Huadong. Progress on Environmental Perception Technology of Foreign Unmanned Surface Vehicles [J]. Acta Armamentarii, 2024, 45(S2): 97-104. |
| [7] | YAO Yu, SONG Chunlin, SHAO Jiangqi. Real-time Detection and Localization Algorithm for Military Vehicles in Drone Aerial Photography [J]. Acta Armamentarii, 2024, 45(S1): 354-360. |
| [8] | WANG Yeru, YANG Geng, LIU Shu, XU Xiao, CHEN Huajie, QIN Feiwei, XU Huajie. GCN-based Detection of Occluded Key Parts of Vehicle Target [J]. Acta Armamentarii, 2024, 45(S1): 242-251. |
| [9] | HU Mingzhe, LI Xuguang, REN Zhiying, ZENG Shuai. UAV 3D Path Planning Based on A* Algorithm with Improved Heuristic Function [J]. Acta Armamentarii, 2024, 45(S1): 302-307. |
| [10] | LI Mao, ZHAO Mingtao, SHA Shichao, LI Xiao, HUA Weihong. Focusing Strategy and Effect Analysis of UAV-based Laser Relay Redirectional Energy Transmission Device [J]. Acta Armamentarii, 2024, 45(S1): 316-321. |
| [11] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [12] | ZHENG Guofeng, WAN Yinqing, WEI Hanbing, ZHAO Shu’en. High-confidence Minimum Acquisition Mileage of Durability Load Spectrum of Off-road Special Vehicles [J]. Acta Armamentarii, 2024, 45(9): 3017-3028. |
| [13] | PAN Zishuang, SU Xichao, HAN Wei, LIU Wenlin, YU Dazhao, WANG Jie. Cooperative Combat Coalition Formation of Heterogeneous UAV Swarm Based on Dynamic Consensus-based Grouping Algorithm [J]. Acta Armamentarii, 2024, 45(9): 3177-3190. |
| [14] | HU Yanyang, HE Fan, BAI Chengchao. Cooperative Obstacle Avoidance Decision Method for the Terminal Guidance Phase of Hypersonic Vehicles [J]. Acta Armamentarii, 2024, 45(9): 3147-3160. |
| [15] | LIU Siyu, ZHANG Deyu, MING Zhiyuan, LIU Mengzhen, LIU Ziyu, CHEN Qiming, ZHANG Jian, WU Jinglong, YAN Tianyi. Remote Brain-controlled Unmanned Aerial Vehicle System Based on Brain-machine Interface and Human-machine Closed Loop [J]. Acta Armamentarii, 2024, 45(9): 3191-3203. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||