
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (S1): 354-360.doi: 10.12382/bgxb.2024.0518
YAO Yu*( ), SONG Chunlin, SHAO Jiangqi
), SONG Chunlin, SHAO Jiangqi
Received:2024-07-01
Online:2024-11-06
Contact:
YAO Yu
CLC Number:
YAO Yu, SONG Chunlin, SHAO Jiangqi. Real-time Detection and Localization Algorithm for Military Vehicles in Drone Aerial Photography[J]. Acta Armamentarii, 2024, 45(S1): 354-360.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Overall architecture diagram
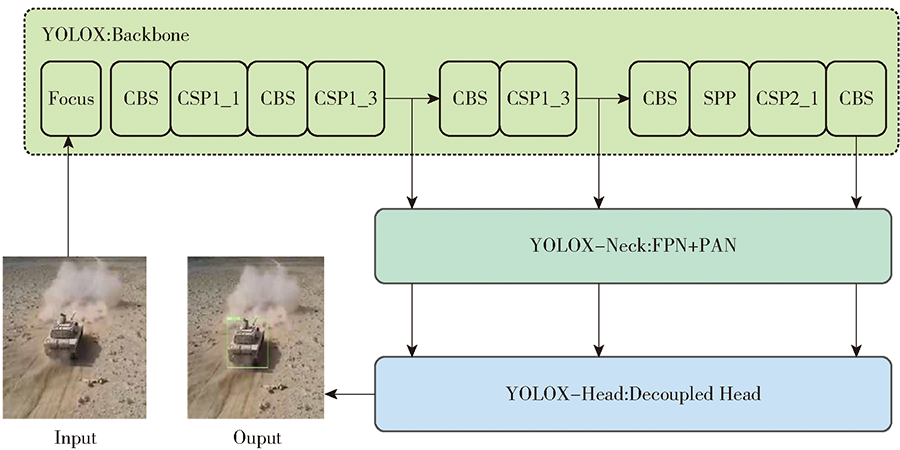
Fig.2 YOLOX-Tiny model structure
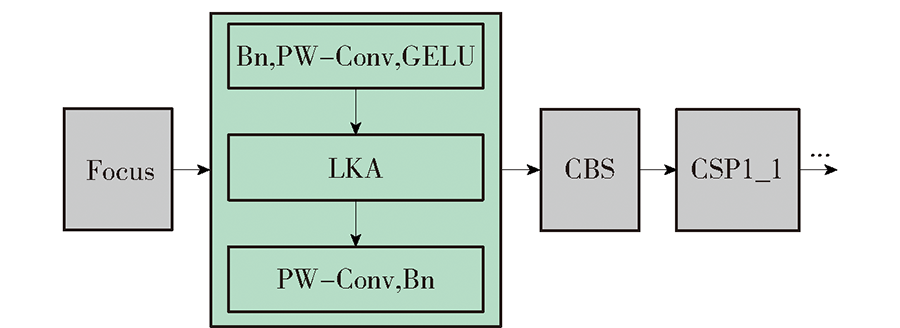
Fig.3 Improved YOLOX Tiny backbone network
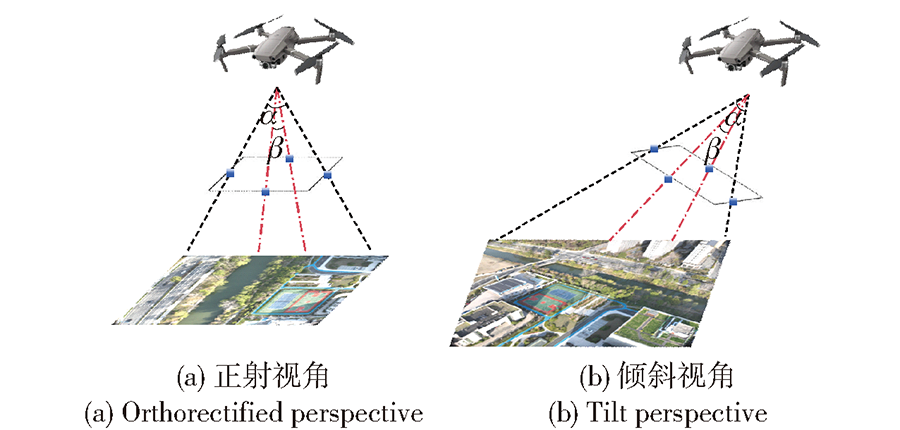
Fig.4 Drone camera field of view
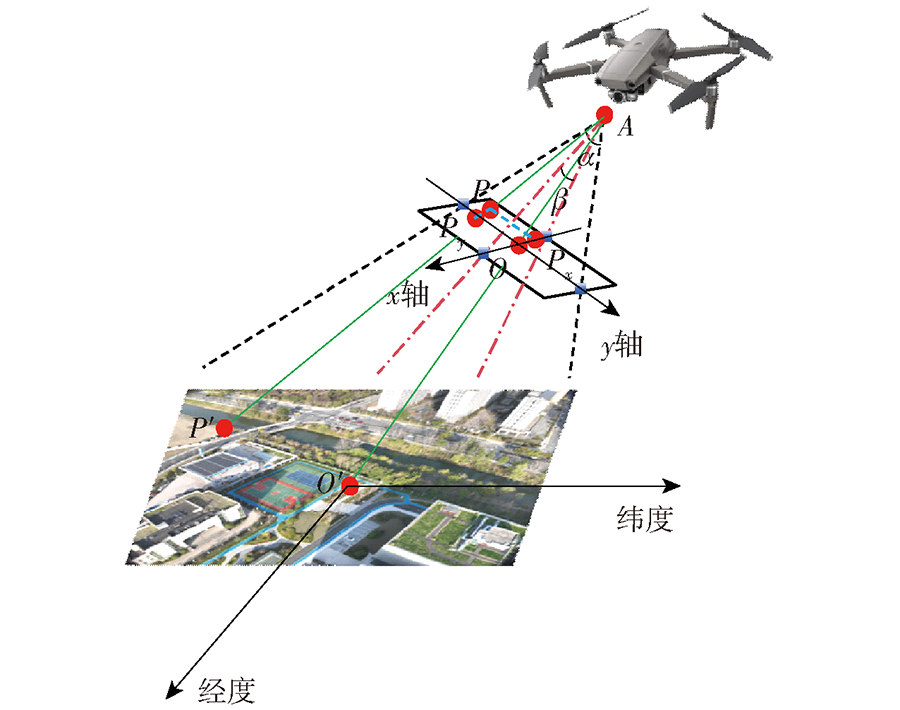
Fig.5 Spatial geometric relationship of pixels in aerial image

Fig.6 Armed_vehicle dataset
| 数据集属性名称 | 数据集属性描述 |
|---|---|
| 数据集名称 | 航拍军事车辆数据集Armed_vehicle |
| 图像分辨率 | 608×608 |
| 图像数量 | 1 884 |
| 军事车辆数量 | 3 408 |
| 图像类型 | RGB、灰度 |
| 军事车辆种类 | 坦克、装甲车、运输车、野战皮卡、炮弹发射车 |
| 军事车辆状态 | 正常、损伤、损毁 |
| 作战场景 | 城市、山地、河岸、荒漠、草原 |
Table 1 Basic information of the Armed_vehicle dataset
| 数据集属性名称 | 数据集属性描述 |
|---|---|
| 数据集名称 | 航拍军事车辆数据集Armed_vehicle |
| 图像分辨率 | 608×608 |
| 图像数量 | 1 884 |
| 军事车辆数量 | 3 408 |
| 图像类型 | RGB、灰度 |
| 军事车辆种类 | 坦克、装甲车、运输车、野战皮卡、炮弹发射车 |
| 军事车辆状态 | 正常、损伤、损毁 |
| 作战场景 | 城市、山地、河岸、荒漠、草原 |
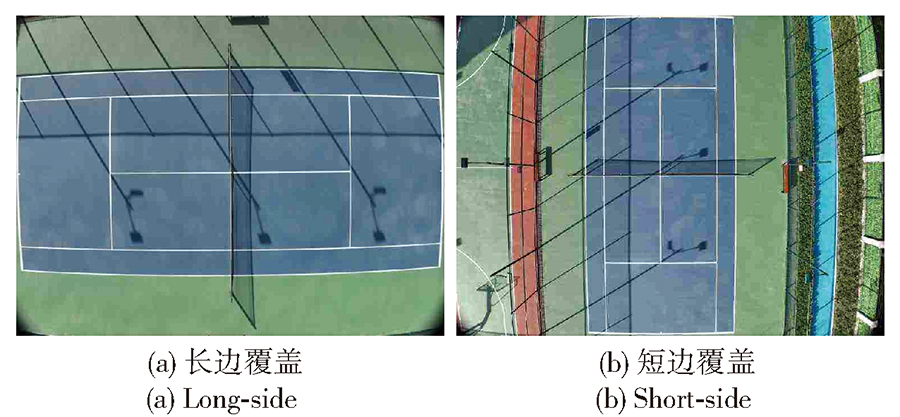
Fig.7 Perspective measurement reference

Fig.8 Aerial image annotation
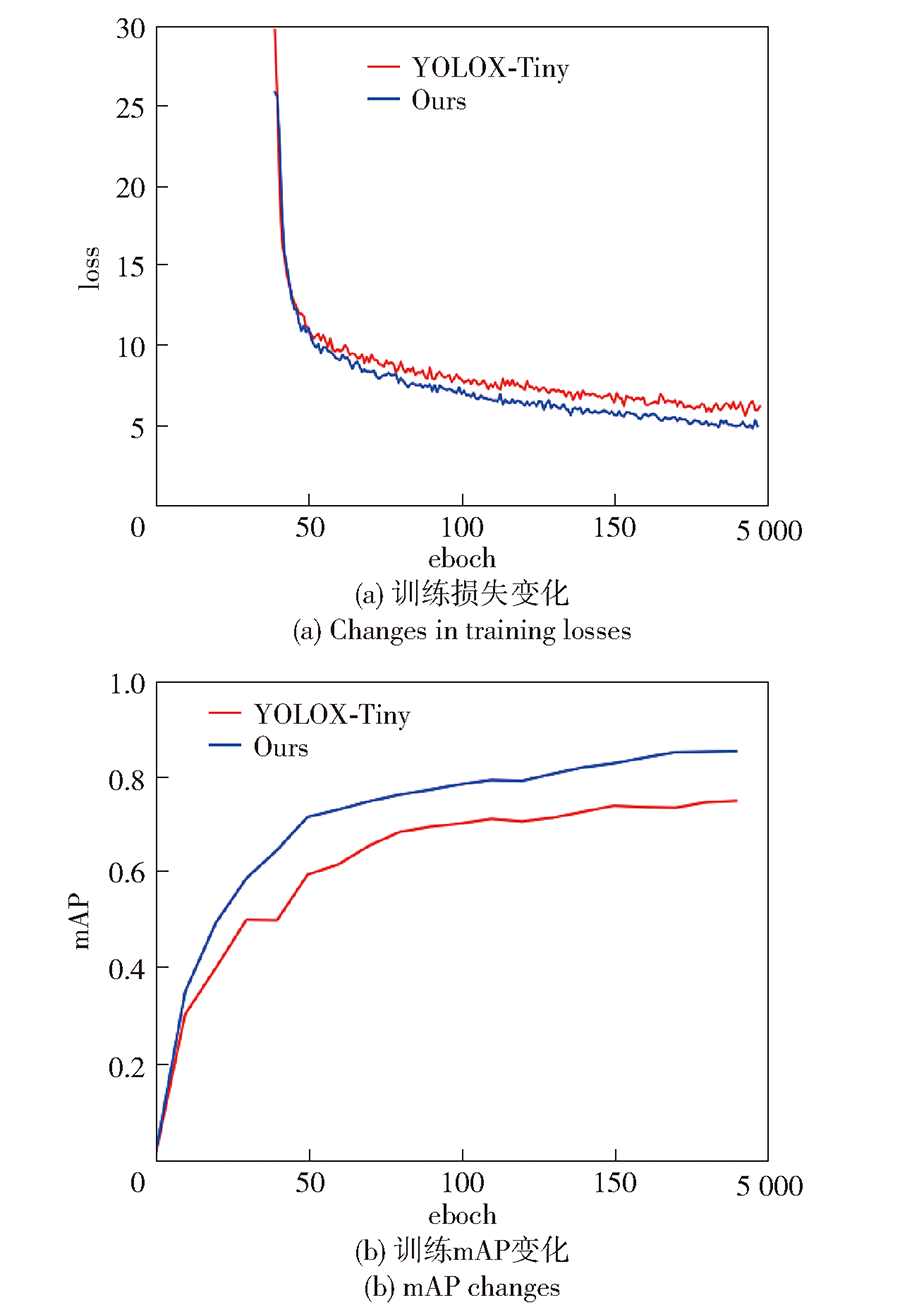
Fig.9 Changes in training loss and average accuracy before and after improvement
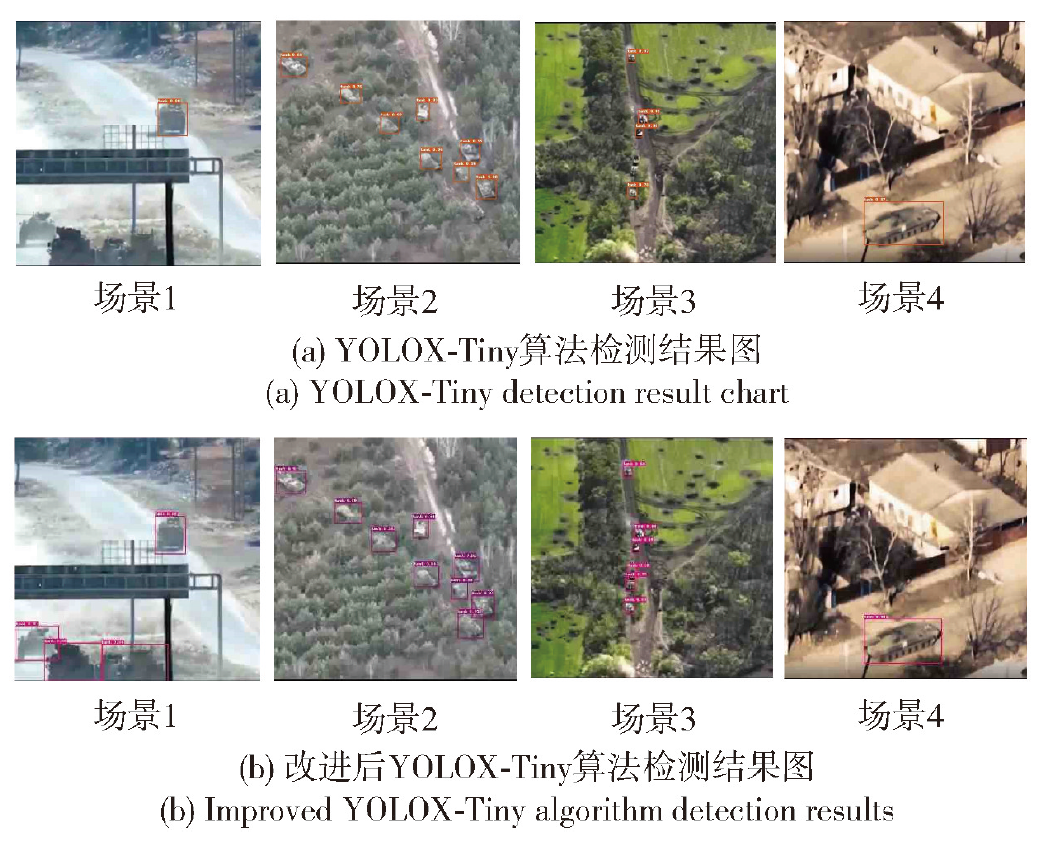
Fig.10 Comparison of detection effects before and after improvement
| 算法 | mAP/% | FPS | Params/106 | Weights/MB |
|---|---|---|---|---|
| SSD | 87.31 | 11 | 24.7 | 188 |
| CenterNet | 89.67 | 12 | 32.7 | 124 |
| YOLOv3_MobileNetV3 | 81.39 | 26 | 29.1 | 88.6 |
| YOLOv5-S | 82.28 | 20 | 7.3 | 28.1 |
| YOLOX-S | 85.66 | 19 | 9.0 | 34.2 |
| YOLOX-Tiny | 82.59 | 21 | 5.1 | 19.3 |
| 本文算法 | 85.82 | 21 | 5.1 | 19.3 |
Table 2 Comparison of the detected results of the proposed algorithm and other detection algorithms
| 算法 | mAP/% | FPS | Params/106 | Weights/MB |
|---|---|---|---|---|
| SSD | 87.31 | 11 | 24.7 | 188 |
| CenterNet | 89.67 | 12 | 32.7 | 124 |
| YOLOv3_MobileNetV3 | 81.39 | 26 | 29.1 | 88.6 |
| YOLOv5-S | 82.28 | 20 | 7.3 | 28.1 |
| YOLOX-S | 85.66 | 19 | 9.0 | 34.2 |
| YOLOX-Tiny | 82.59 | 21 | 5.1 | 19.3 |
| 本文算法 | 85.82 | 21 | 5.1 | 19.3 |
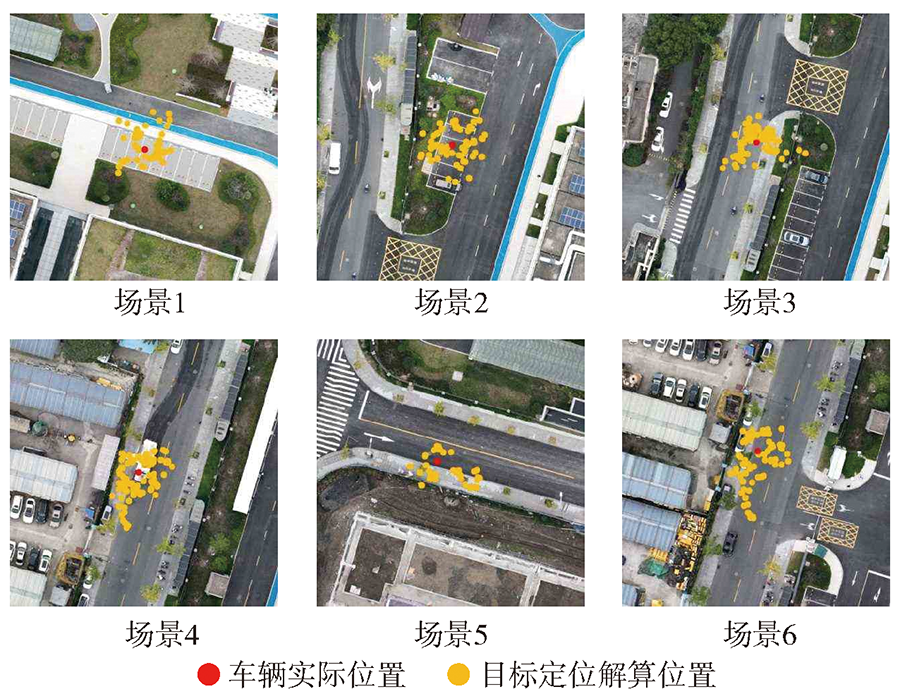
Fig.11 Positioning effect of monocular visual localization algorithm
| 参数 | 目标车辆 | 总和 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B | C | D | E | F | G | H | I | J | K | ||
| 验证数目 | 51 | 45 | 27 | 66 | 79 | 25 | 88 | 69 | 39 | 43 | 33 | 565 |
| 最大误差/m | 7.19 | 8.65 | 6.23 | 6.76 | 8.60 | 8.51 | 9.76 | 11.75 | 8.03 | 10.59 | 9.06 | 11.75 |
| 平均误差/m | 3.25 | 3.44 | 3.77 | 3.55 | 2.99 | 2.84 | 3.88 | 4.49 | 4.05 | 4.32 | 3.79 | 3.69 |
Table 3 Accuracy verification of target localization algorithm
| 参数 | 目标车辆 | 总和 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B | C | D | E | F | G | H | I | J | K | ||
| 验证数目 | 51 | 45 | 27 | 66 | 79 | 25 | 88 | 69 | 39 | 43 | 33 | 565 |
| 最大误差/m | 7.19 | 8.65 | 6.23 | 6.76 | 8.60 | 8.51 | 9.76 | 11.75 | 8.03 | 10.59 | 9.06 | 11.75 |
| 平均误差/m | 3.25 | 3.44 | 3.77 | 3.55 | 2.99 | 2.84 | 3.88 | 4.49 | 4.05 | 4.32 | 3.79 | 3.69 |
| [1] |
朱家辉, 苏维均, 于重重, 等. 基于RGB图像的坦克损伤目标三维检测研究与应用[J]. 火力与指挥控制, 2022, 47(4):169-175.
|
|
|
|
| [2] |
童雪东. 面向无人作战车辆的图像敏感目标检测技术的研究与实现[D]. 南京: 南京理工大学, 2019.
|
|
|
|
| [3] |
褚文杰. 基于YOLOv5的坦克装甲车辆目标检测关键技术的研究[D]. 北京: 北京交通大学, 2022.
|
|
|
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
GEVORGYAN Z SIoU loss: more powerful learning for bounding box regression:arXiv:2205.12740[R].Ithaca,NY,US: Cornell University, 2022:2205.12740.
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
doi: 10.1038/s41598-024-53498-y pmid: 38310143 |
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [1] | ZHAO Zhixin, CAO Yulong, CHEN Yuanshuai, ZHOU Huilin, WANG Yuhao. A Time-invariant Sparse Model and a Deep Unrolling Network for Target Detection of Passive Radar [J]. Acta Armamentarii, 2024, 45(8): 2806-2816. |
| [2] | CHANG Tianqing, ZHANG Jie, ZHAO Liyang, HAN Bin, ZHANG Lei. Research on Armored Vehicle Detection Algorithm Based on Visible and Infrared Image Fusion [J]. Acta Armamentarii, 2024, 45(7): 2085-2096. |
| [3] | LIU Peng, XIONG Zeyu, JING Wenbo, FENG Xuan, ZHANG Junhao, LIU Tongbo, WU Xueni, XIA Xuan, WAN Linlin, ZHAO Haili. Degrad Target Detection Algorithm [J]. Acta Armamentarii, 2024, 45(6): 2065-2075. |
| [4] | LIANG Guolong, LUO Junge, HAO Yu, FU Jin. An Array Extension Method Based on Combination of Sub-array Covariance Matrices [J]. Acta Armamentarii, 2024, 45(5): 1717-1724. |
| [5] | SHEN Ying, LIU Xiancai, WANG Shu, HUANG Feng. Real-time Detection of Low-altitude Camouflaged Targets Based on Polarization Encoded Images [J]. Acta Armamentarii, 2024, 45(5): 1374-1383. |
| [6] | SHEN Ying, HUANG Weida, ZHOU Zebing, HUANG Feng, WANG Shu. Contrast Enhancement for Camouflage Target Detection Based on Feature Band Polarization Imaging [J]. Acta Armamentarii, 2024, 45(10): 3488-3498. |
| [7] | HUI Kanghua, YANG Wei, LIU Haohan, ZHANG Zhi, ZHENG Jin, BAI Xiao. Enhanced Multi-scale Target Detection Method Based on YOLOv5 [J]. Acta Armamentarii, 2023, 44(9): 2600-2610. |
| [8] | ZHOU Yu, CAO Ronggang, LI Ping, MA Xiao. A Fuze Burst Point Detection Method for Outfield Test Images [J]. Acta Armamentarii, 2023, 44(8): 2453-2464. |
| [9] | WANG Xuemin, YU Hongbo, ZHANG Xiangyu, AN Shu, LI Wenhai. Underwater Multi-target Detection Method Based on Hough Transform Track-before-detect Technique [J]. Acta Armamentarii, 2023, 44(7): 2114-2121. |
| [10] | LIU Song, YAO Zhixiang, LU Daiqiang, YUAN Jun. An Automatic Detection Algorithm Based on Wideband Spatial Spectrum of Passive Sonar [J]. Acta Armamentarii, 2023, 44(6): 1764-1774. |
| [11] | MA Pengge, WEI Hongguang, SUN Junling, TAO Ran, PANG Dongdong, SHAN Tao, CAI Zhiyong, LIU Zhaoyu. A LOG Filter Based Enhanced Local Contrast Algorithm to Detect Infrared Small Targets [J]. Acta Armamentarii, 2023, 44(4): 1041-1049. |
| [12] | SUN Qiang, ZHANG Jiawei, YU Peng. Analysis of Electric Field Interference Characteristics and Signal Detection Method Based on Ocean Buoys [J]. Acta Armamentarii, 2023, 44(3): 857-864. |
| [13] | WANG Qiang, WU Letian, LI Hong, WANG Yong, WANG Huan, YANG Wankou. An Infrared Small Target Detection Method via Dual Network Collaboration [J]. Acta Armamentarii, 2023, 44(10): 3165-3176. |
| [14] | WU Huan, LI Yinong, ZHANG Zhida, ZHANG Ziwei, PU Huayan, LUO Jun. Design of a Full-Length Effective Automotive Magnetorheological Damper with magnetically Conductive Ring of Trapezoidal Cross Section [J]. Acta Armamentarii, 2023, 44(1): 61-73. |
| [15] | WANG Zhong-mei, YANG Xiao-mei , GU Xing-fa. Small Target Detection in a Single Infrared Image Based on RPCA [J]. Acta Armamentarii, 2016, 37(9): 1753-1760. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||