
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (6): 240483-.doi: 10.12382/bgxb.2024.0483
Previous Articles Next Articles
MA Yuwei1, WU Weichao1,*( ), WANG Wei2, NIU Ailin1, GUO Zhiming3, YANG Jianxin4
), WANG Wei2, NIU Ailin1, GUO Zhiming3, YANG Jianxin4
Received:2024-06-18
Online:2025-06-28
Contact:
WU Weichao
CLC Number:
MA Yuwei, WU Weichao, WANG Wei, NIU Ailin, GUO Zhiming, YANG Jianxin. Map Lightweight Processing and Staircase Area Classification Method for Indoor Navigation of Unmanned Ground Platforms[J]. Acta Armamentarii, 2025, 46(6): 240483-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Map construction process

Fig.2 Distribution of environmental normal vectors
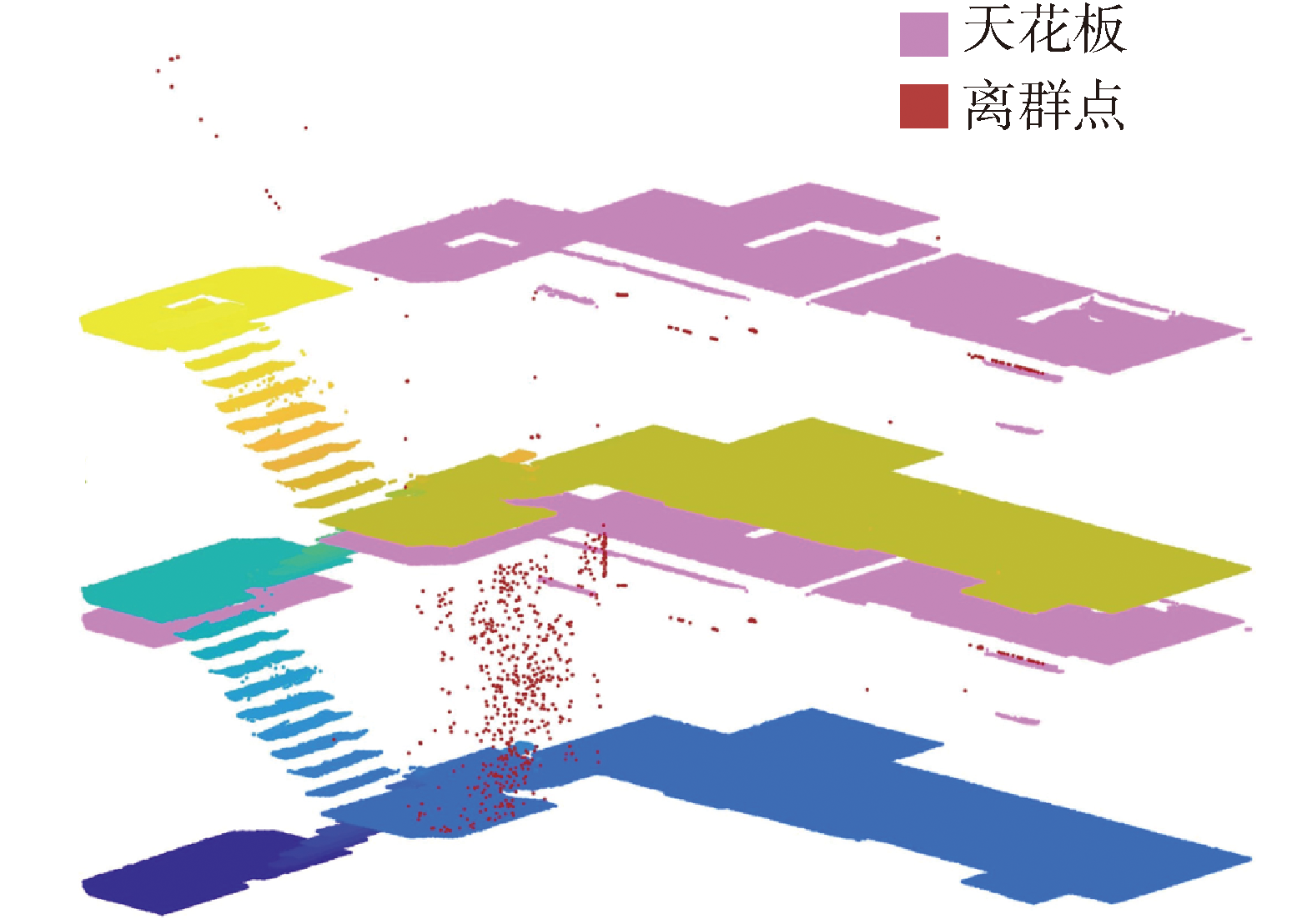
Fig.3 Extracted point cloud

Fig.4 Geometric parameters of horizontal regions and decision domain
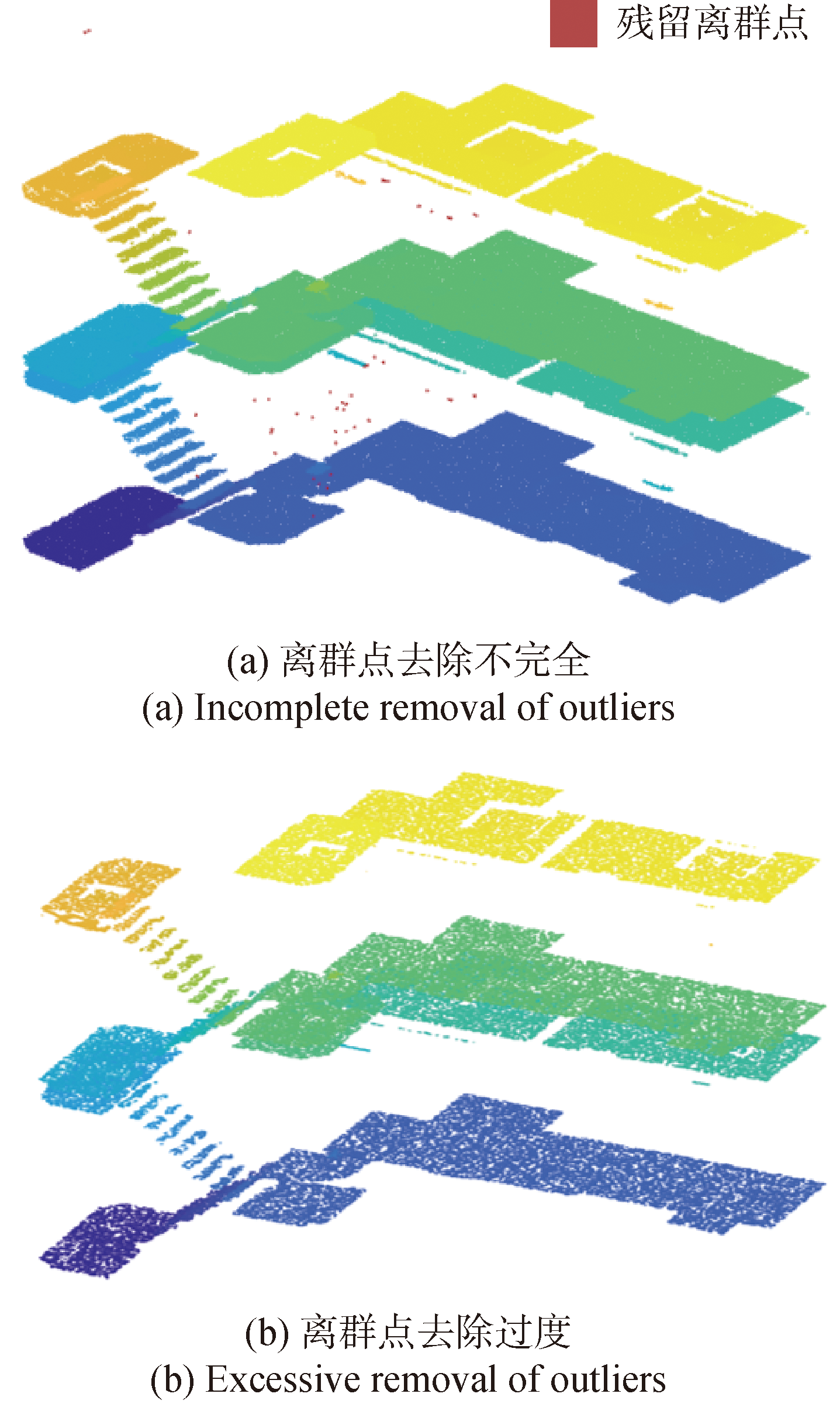
Fig.5 Diagram of outlier removal
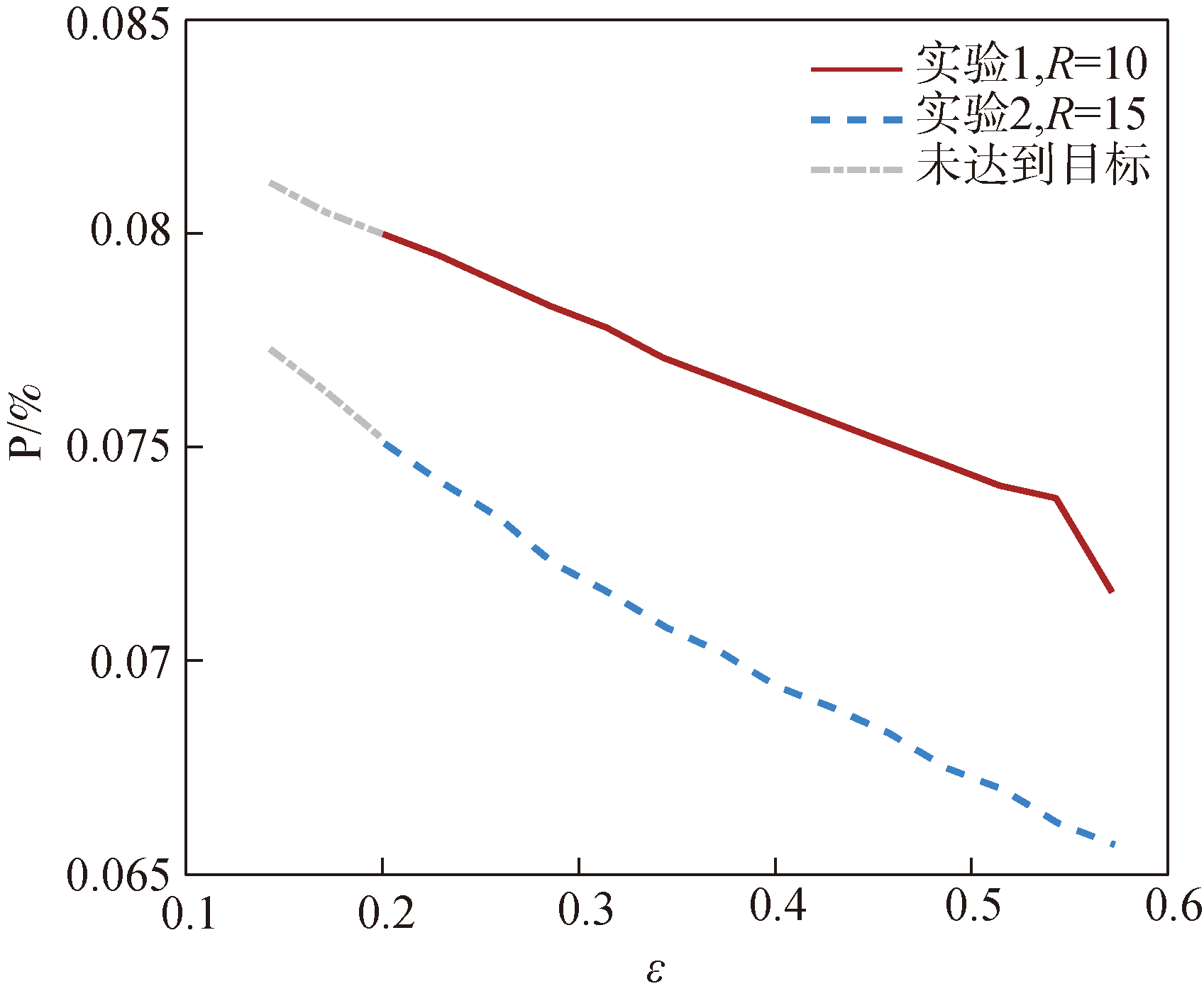
Fig.6 ε-P relationship graph for outlier filtering
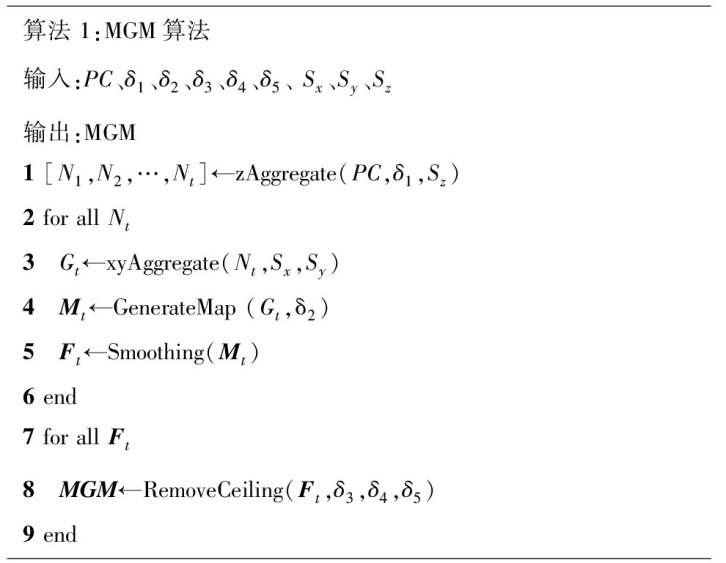
Fig.7 Pseudocode for MGM algorithm

Fig.8 Schematic diagram of Smoothing function convolution

Fig.9 Illustration of the results of removing the ceiling operation
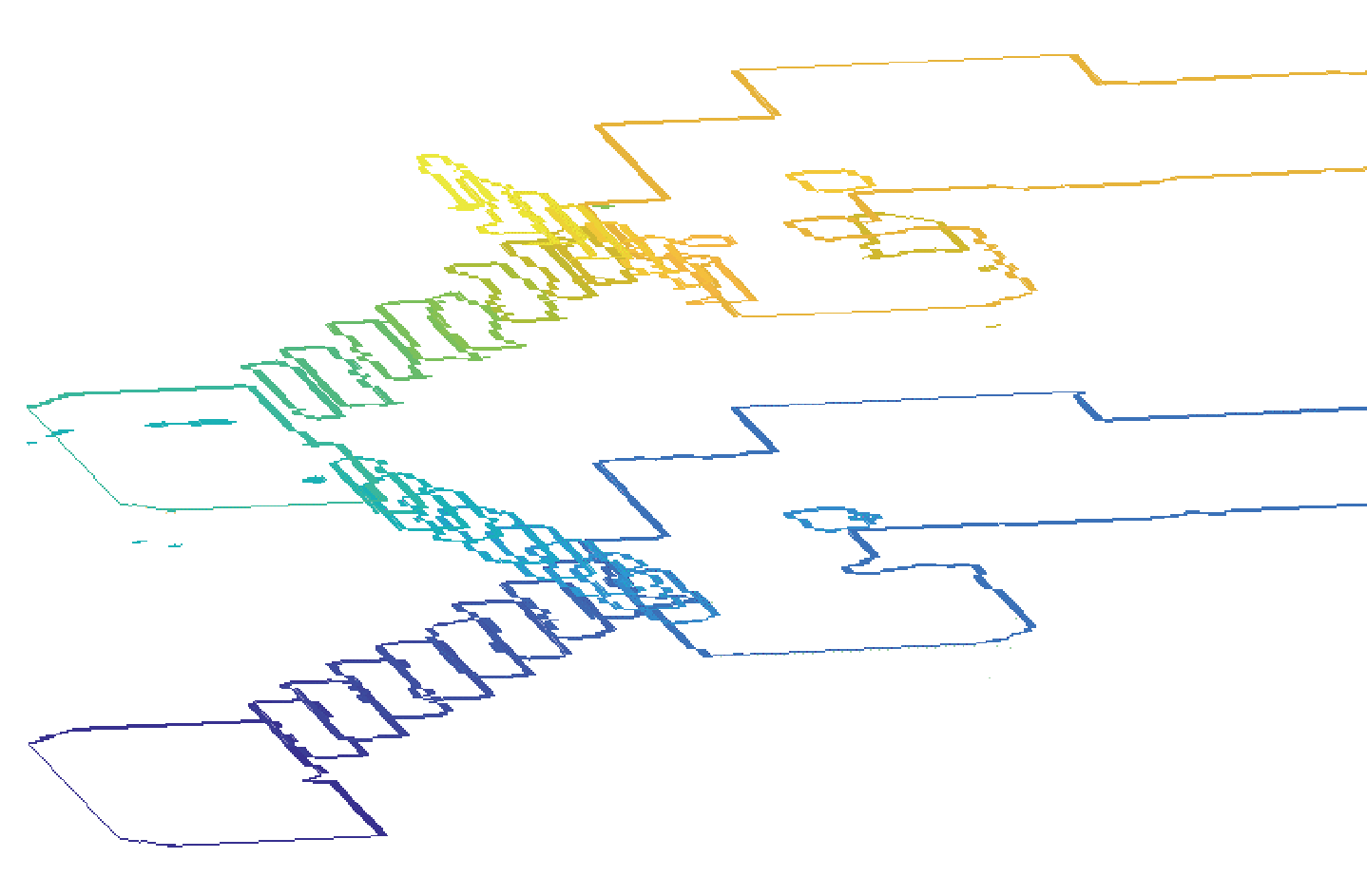
Fig.10 Ground edge grid map

Fig.11 The statistical results of ground edge grid map
| 真实类别 | 预测类别 | |||
|---|---|---|---|---|
| c1 | c2 | … | ck | |
| c1 | … | |||
| c2 | … | |||
| ︙ | ︙ | ︙ | ︙ | |
| ck | … | |||
Table 1 Confusion matrix for multi-class classification
| 真实类别 | 预测类别 | |||
|---|---|---|---|---|
| c1 | c2 | … | ck | |
| c1 | … | |||
| c2 | … | |||
| ︙ | ︙ | ︙ | ︙ | |
| ck | … | |||
| 评价指标 | 评价值 |
|---|---|
| PM | 0.913 |
| RM | 0.837 |
| F1M | 0.872 |
Table 2 Classification result evaluation value
| 评价指标 | 评价值 |
|---|---|
| PM | 0.913 |
| RM | 0.837 |
| F1M | 0.872 |

Fig.12 Experiment on constructing multi-layer grid map
| 地图 模型 | 数据集 | 能否直接 用于路径 规划 | 占用存储 空间 | 面向地面无 人平台的可通 行区域占比/% |
|---|---|---|---|---|
| 点云 | S3DIS | 否 | 82111KB | |
| BIT3DIS | 否 | 2263MB | ||
| 体素 | S3DIS | 是 | 4691KB | 33.5 |
| BIT3DIS | 是 | 33.5MB | 22.0 | |
| 三维网格 | S3DIS | 是 | 7505KB | 40.0 |
| BIT3DIS | 是 | 47.1MB | 39.9 | |
| 八叉树 | S3DIS | 是 | 1519KB | 33.6 |
| BIT3DIS | 是 | 13.8MB | 22.3 | |
| MGM | S3DIS | 是 | 3028KB | 99.2 |
| BIT3DIS | 是 | 25MB | 96.4 |
Table 3 Comparison of parameters of different map models
| 地图 模型 | 数据集 | 能否直接 用于路径 规划 | 占用存储 空间 | 面向地面无 人平台的可通 行区域占比/% |
|---|---|---|---|---|
| 点云 | S3DIS | 否 | 82111KB | |
| BIT3DIS | 否 | 2263MB | ||
| 体素 | S3DIS | 是 | 4691KB | 33.5 |
| BIT3DIS | 是 | 33.5MB | 22.0 | |
| 三维网格 | S3DIS | 是 | 7505KB | 40.0 |
| BIT3DIS | 是 | 47.1MB | 39.9 | |
| 八叉树 | S3DIS | 是 | 1519KB | 33.6 |
| BIT3DIS | 是 | 13.8MB | 22.3 | |
| MGM | S3DIS | 是 | 3028KB | 99.2 |
| BIT3DIS | 是 | 25MB | 96.4 |
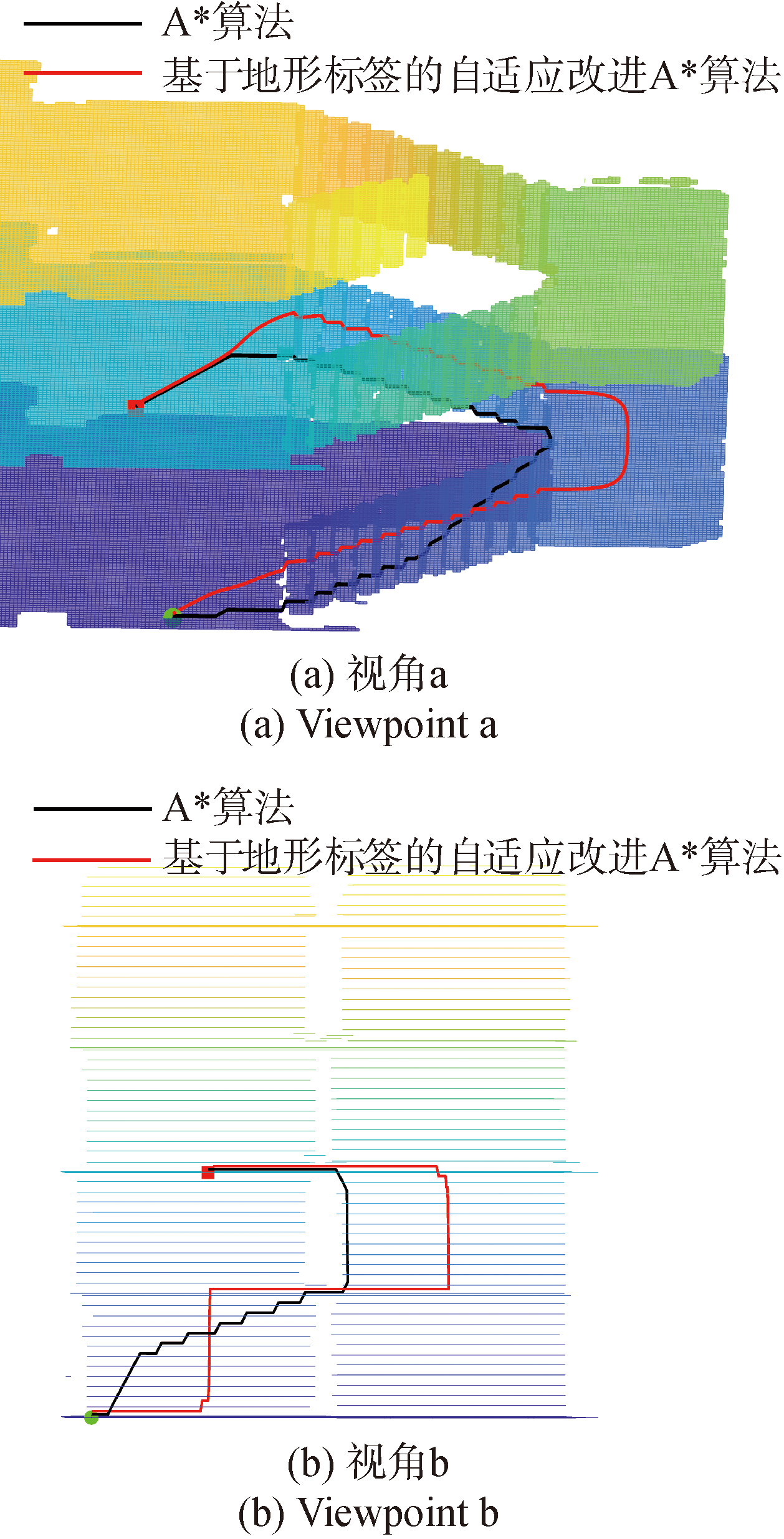
Fig.13 Schematic diagram of path planning
| [1] |
田野, 陈宏巍, 王法胜, 等. 室内移动机器人的SLAM算法综述[J]. 计算机科学, 2021, 48(9):223-234.
|
|
|
|
| [2] |
|
| [3] |
张福斌, 张炳烁, 杨玉帅. 基于单目/IMU/里程计融合的SLAM算法[J]. 兵工学报, 2022, 43(11):2810-2818.
|
|
|
|
| [4] |
张耀, 吴一全, 陈慧娴. 基于深度学习的视觉同时定位与建图研究进展[J]. 仪器仪表学报, 2023, 44(7):214-241.
|
|
|
|
| [5] |
李娇娇, 孙红岩, 董雨, 等. 基于深度学习的3维点云处理综述[J]. 计算机研究与发展, 2022, 59(5):1160-1179.
|
|
|
|
| [6] |
|
| [7] |
杨阳. 基于多线激光雷达的地图构建技术研究[J]. 计算机科学与应, 2022, 12(10):2249-2258.
|
|
|
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
张韵, 王淑营, 郑庆, 等. 保持细节几何特征的三维网格模型轻量化算法[J]. 计算机应用, 2023, 43(4):1226-1232
|
|
|
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
赵艺博, 霍冬浩, 陈彦钦, 等. 基于单目视觉的四轴飞行器体素地图重建系统的研究[J]. 电子技术与软件工程, 2022(9):172-175.
|
|
|
|
| [17] |
蔡志宏, 赵慧, 周亮, 等. 一种多线激光雷达室外小范围导航算法设计[J]. 机械设计与制造, 2022, 374(4):258-261.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
熊光明, 于全富, 胡秀中, 等. 考虑平台特性的多层建筑物内履带式无人平台运动规划[J]. 兵工学报, 2023, 44 (3):841-850.
|
|
|
|
| [22] |
张萸, 吕品, 赖际舟, 等. 基于激光雷达的多层楼梯检测和建模方法[J]. 导航定位与授时, 2024, 11(4):94-106.
|
|
|
|
| [23] |
|
| [24] |
虎玲, 常霞, 纪峰. 图像边缘检测方法研究新进展[J]. 现代电子技术. 2018, 41(23):32-37.
|
|
|
|
| [25] |
肖扬, 周军. 图像边缘检测综述[J]. 计算机工程与应用, 2023, 59(5):40-54.
|
|
|
|
| [26] |
|
| [1] | XU Tunan, GAO Ang, CHEN Yucheng, YAN Shoucheng, DENG Bin. A Lightweight Recognition Method for Low Altitude Targets in the Battlefield [J]. Acta Armamentarii, 2025, 46(2): 240170-. |
| [2] | ZHAO Chunbo, MO Bo, LI Dawei, ZHAO Jie. Research on Motion Blur Object Detection Technology for Imaging Guidance [J]. Acta Armamentarii, 2025, 46(2): 240376-. |
| [3] | LIU Chengzhe, WANG Haifu, ZHANG Jiahao, ZHENG Yuanfeng. Research on Behavior of Lightweight High-entropy Alloy Jet Penetrating Concrete Targets [J]. Acta Armamentarii, 2024, 45(S1): 60-69. |
| [4] | YIN Guohua, QI Yongsheng, LIU Liqiang, SU Jianqiang, ZHANG Lijie. Lightweight and Fast Target Tracking Algorithm Based on Ghost-TiFPN [J]. Acta Armamentarii, 2024, 45(5): 1703-1716. |
| [5] | ZHAO Xiaoqiang, CHENG Wei. Lightweight Image Super-resolution Reconstruction Based on Cross-fusion of Spatial Features [J]. Acta Armamentarii, 2024, 45(4): 1273-1284. |
| [6] | YUAN Mingzheng, PAN Teng, BIAN Xiaobing, YANG Lei, ZHOU Hongyuan, HUANG Guangyan, ZHANG Hong. Response Characteristics of Curved Fiber Composite Protective Shelter under the action of Explosive Shock Wave [J]. Acta Armamentarii, 2023, 44(12): 3909-3920. |
| [7] | LI Zuoxuan, JIA Liangyue, HAO Jia, WANG Chao, WANG Guoxin, MING Zhenjun, YAN Yan. Lightweight Optimization Design of Unmanned Vehicle Body Structure Based on Multi-working Conditions Correlation [J]. Acta Armamentarii, 2023, 44(11): 3529-3542. |
| [8] | CAO Haozhe, LIU Quanpan. Unmanned Swarm Collaborative Visual SLAM Algorithm Based on Semi-direct Method [J]. Acta Armamentarii, 2023, 44(11): 3345-3358. |
| [9] | CUI Lingfei, GUO Yonghong, XIU Quanfa, SHI Chao, ZHANG Shuoyang. UAV Detection Method Based on Domestic Embedded Intelligent Computing Platform [J]. Acta Armamentarii, 2022, 43(S1): 146-154. |
| [10] | YAN Jiwei, SU Juan, LI Yihong. Building Detection Algorithm in SAR Images Based on Ghost Convolution and Attention Mechanisms [J]. Acta Armamentarii, 2022, 43(7): 1667-1675. |
| [11] | MA Yuehong, KONG Mengyao. A Lightweight Target Detection Algorithm Based on the Improved Faster-RCNN [J]. Acta Armamentarii, 2021, 42(12): 2664-2674. |
| [12] | ZOU Tiangang, YAN Qingdong, GAI Jiangtao, HOU Wei, WANG Zhitao, SHUAI Zhibin, SUN Xueyan. The Scheme of Lightweight Integrated Mixing Transmission Based on Flat Motor for Tracked Vehicle [J]. Acta Armamentarii, 2021, 42(10): 2233-2241. |
| [13] | LIANG Jie, REN Jun, LI Lei, QI Hang, ZHOU Hongli. Airport Runway Detection Agorithm Based on Accurate Regression of Typical Geometric Shapes [J]. Acta Armamentarii, 2020, 41(10): 2045-2054. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||