
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (6): 240035-.doi: 10.12382/bgxb.2025.0035
• Special Topics of Academic Papers at the 27th Annual Meeting of the China Association for Science and technology • Previous Articles Next Articles
YU Mingjun1,2, ZHANG Jialiang2,3, SHEN Haidong1,2,*( ), LIU Yanbin1,2, CHEN Jinbao1,2
), LIU Yanbin1,2, CHEN Jinbao1,2
Received:2025-01-09
Online:2025-06-28
Contact:
SHEN Haidong
CLC Number:
YU Mingjun, ZHANG Jialiang, SHEN Haidong, LIU Yanbin, CHEN Jinbao. Intelligent Hypersonic Gliding Vehicle Trajectory Prediction Based on Aerodynamic Acceleration Estimation[J]. Acta Armamentarii, 2025, 46(6): 240035-.
Add to citation manager EndNote|Ris|BibTeX
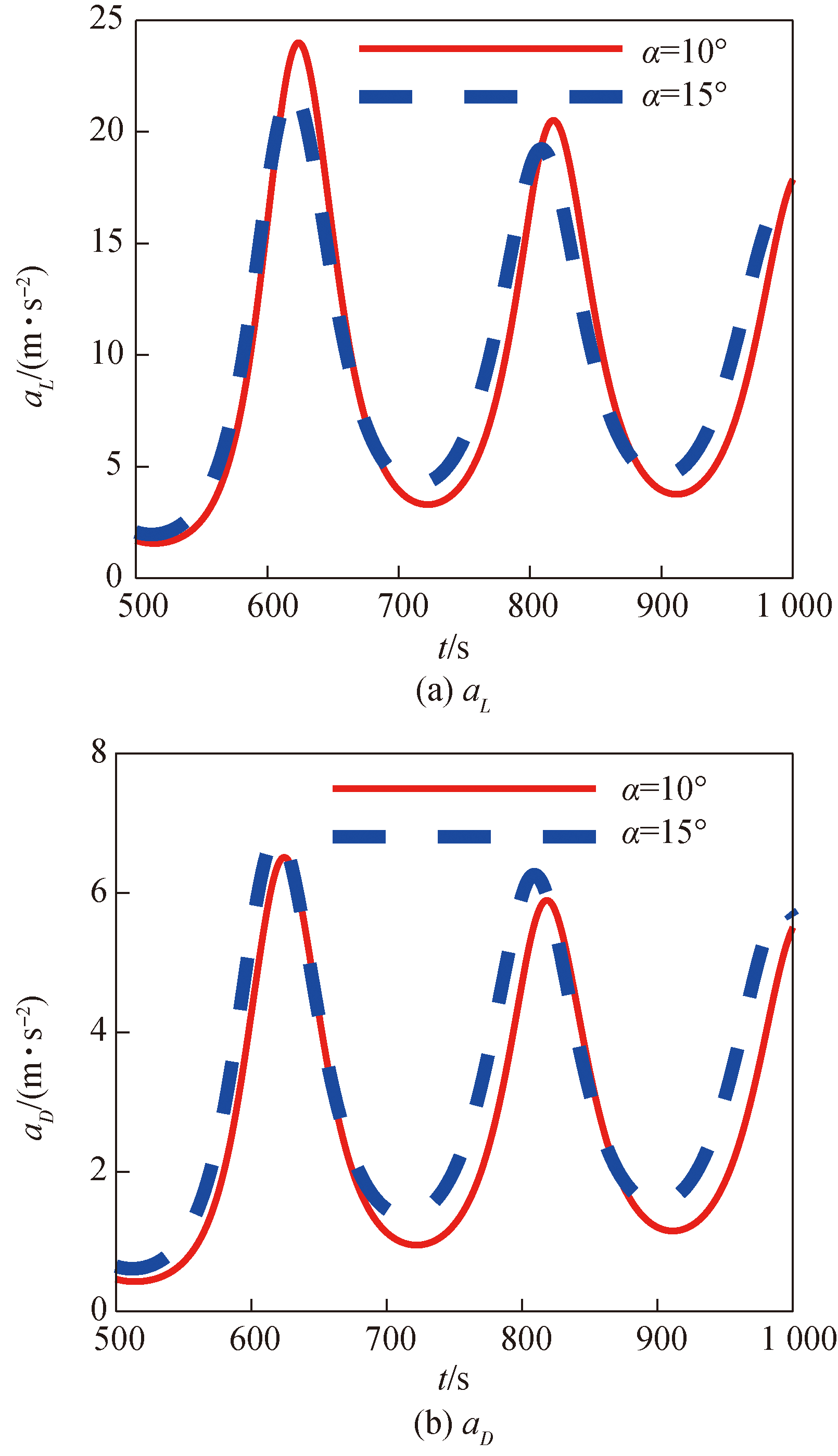
Fig.1 Aerodynamic accelerations at different angles of attack
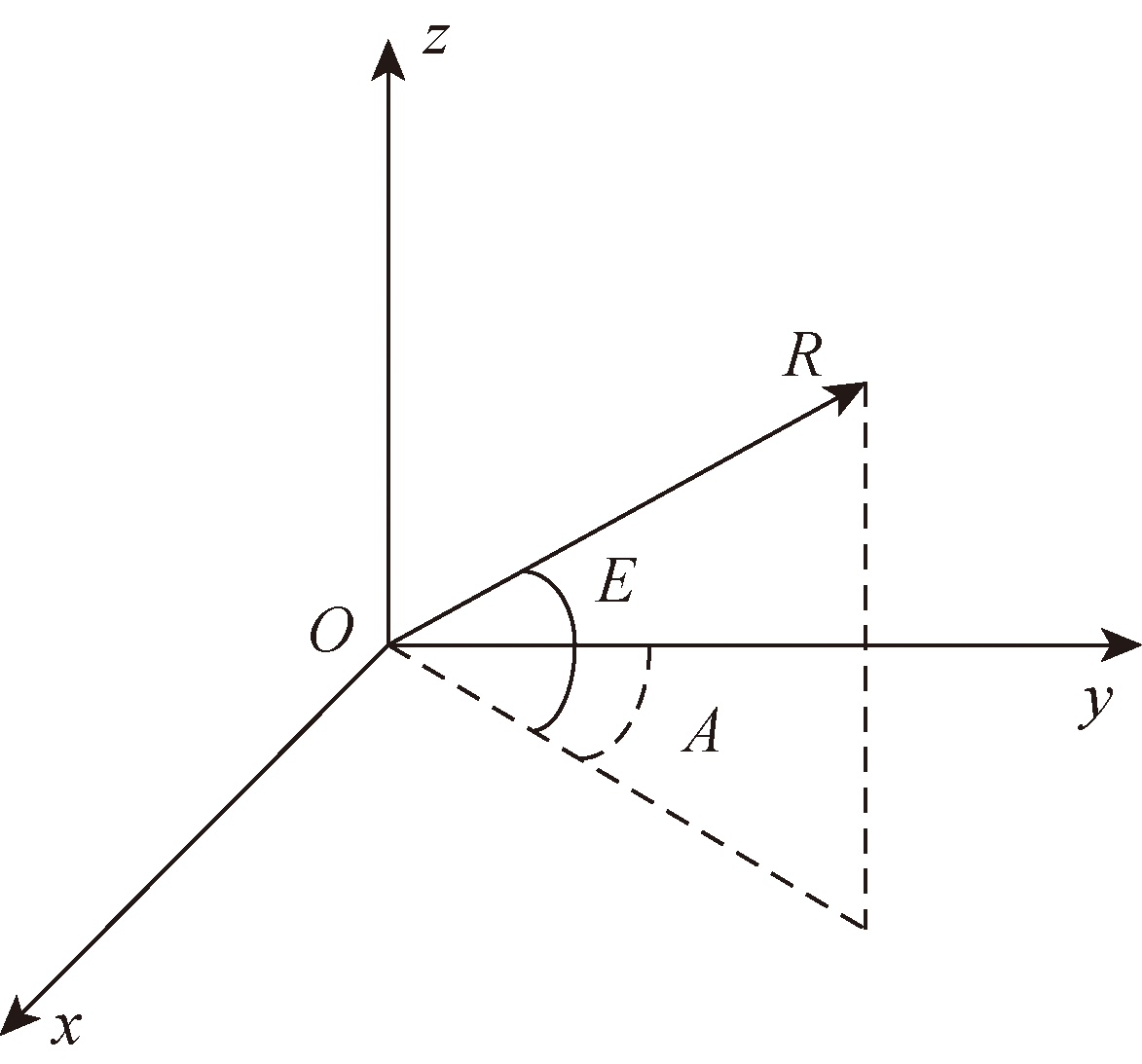
Fig.2 Radar observation model

Fig.3 Overall scheme of trajectory prediction method based on LSTM parameter identification
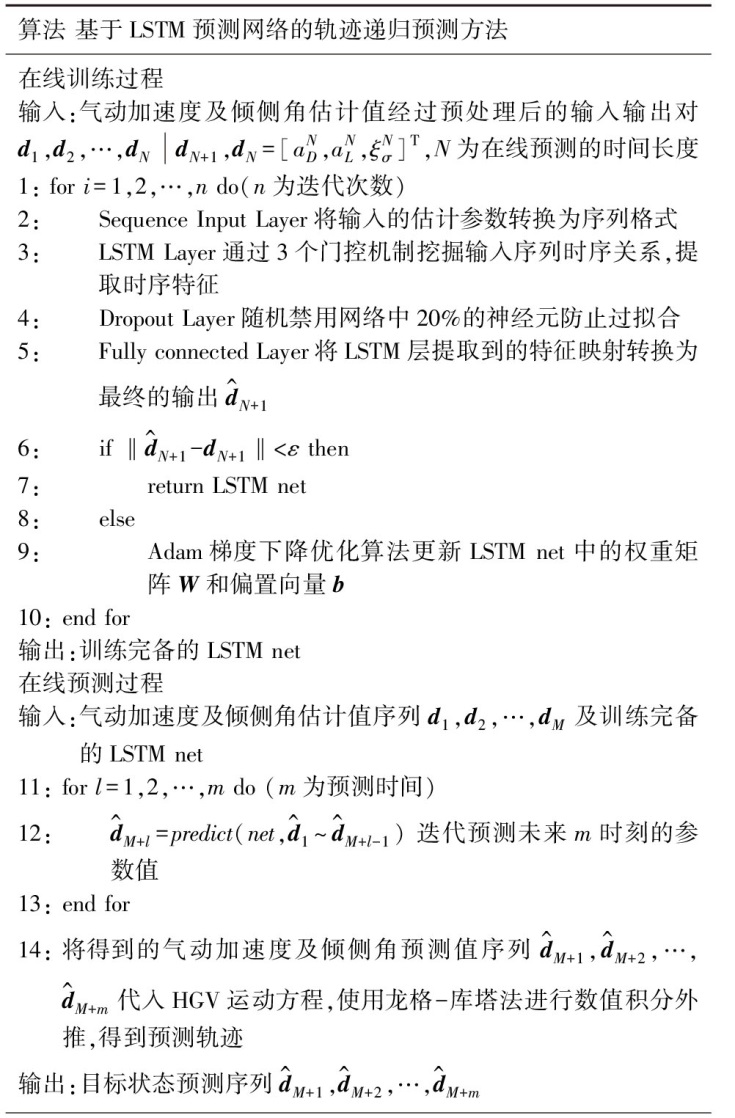
Fig.4 LSTM network-based trajectory recursive prediction
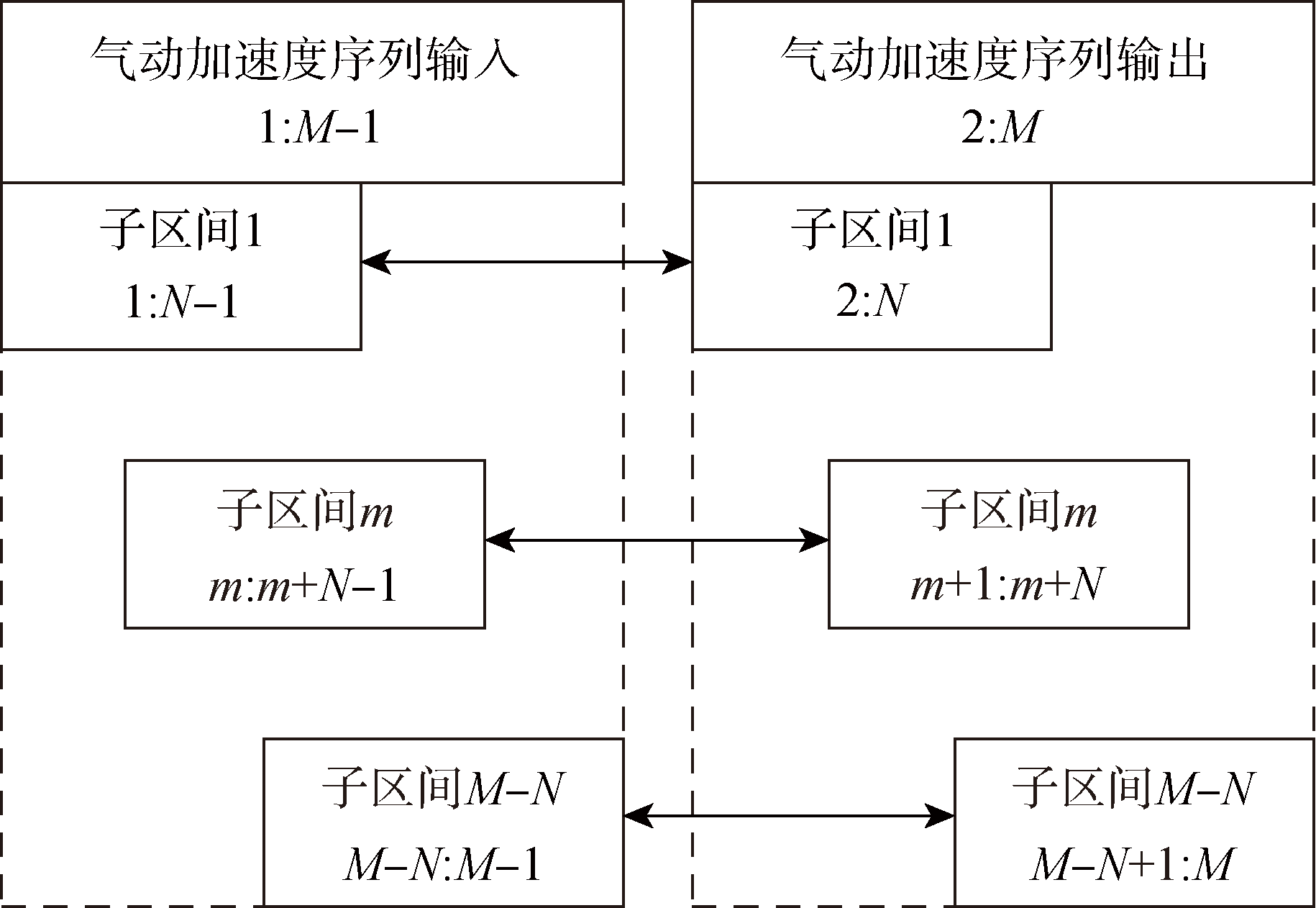
Fig.5 Data segmentation procedure
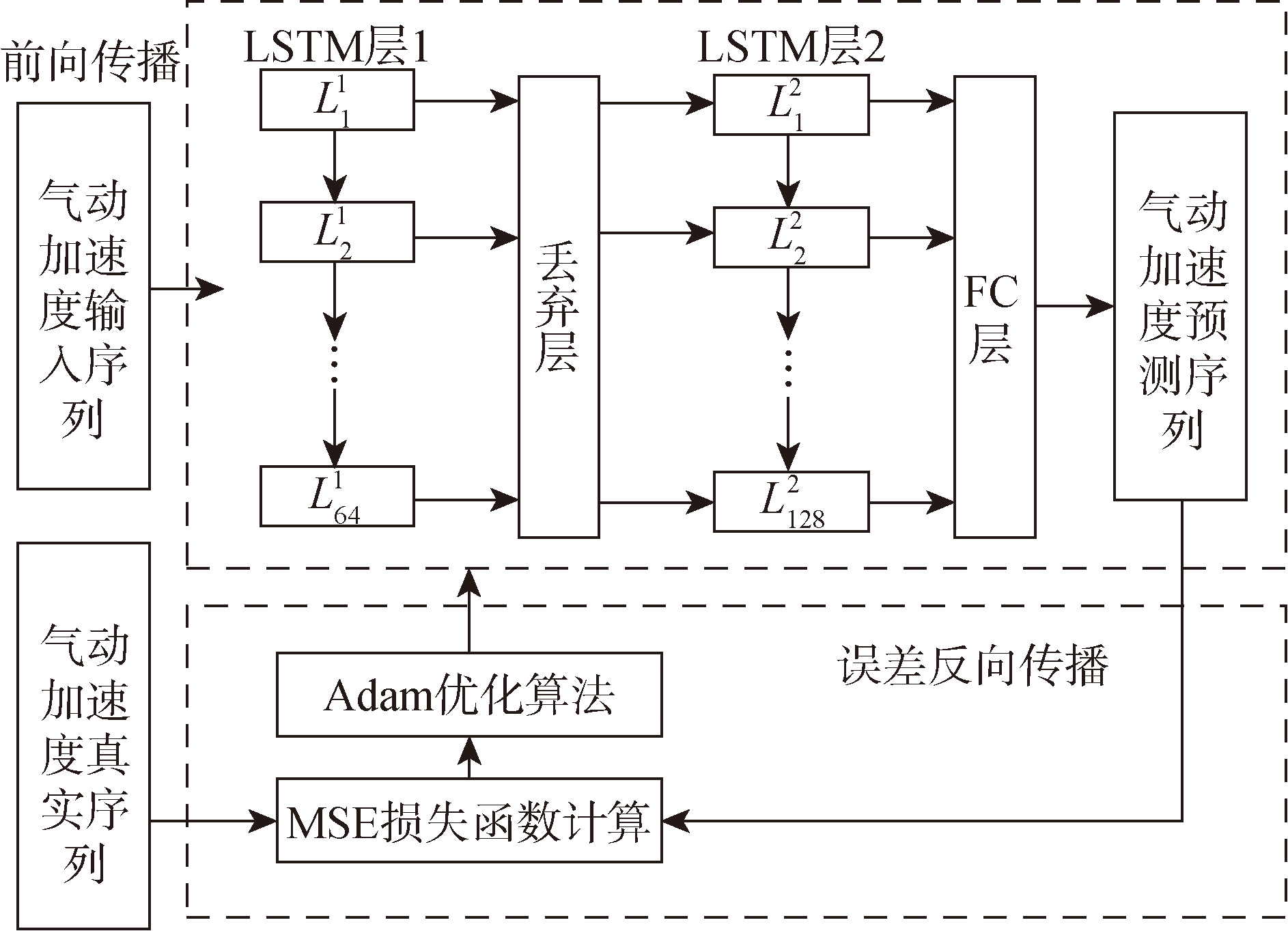
Fig.6 LSTM network structure
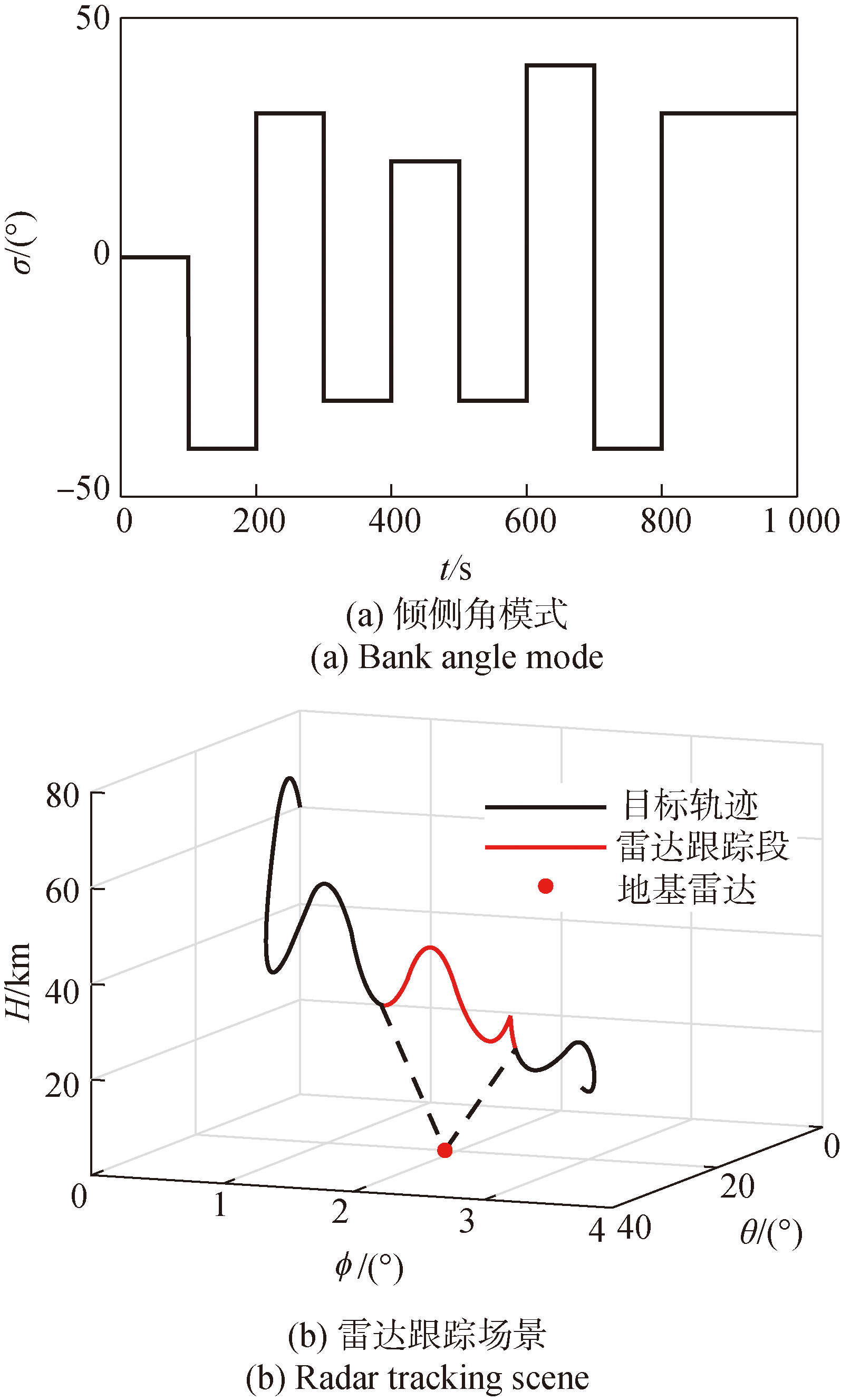
Fig.7 Simulation scene
| 网络层 | 神经元个数 |
|---|---|
| LSTM层1 | 64 |
| LSTM层2 | 128 |
| 输入层1 | 64 |
| 输入层2 | 3 |
Table 1 Neuron node number Settings
| 网络层 | 神经元个数 |
|---|---|
| LSTM层1 | 64 |
| LSTM层2 | 128 |
| 输入层1 | 64 |
| 输入层2 | 3 |
| 参数 | 取值 |
|---|---|
| 最大训练迭代次数 | 100 |
| 最小批次 | 128 |
| 初始学习率 | 0.005 |
| 学习率下降因子 | 0.2 |
| 正则化系数 | 0.1 |
| 优化器 | Adam |
Table 2 Network training hyperparameter settings
| 参数 | 取值 |
|---|---|
| 最大训练迭代次数 | 100 |
| 最小批次 | 128 |
| 初始学习率 | 0.005 |
| 学习率下降因子 | 0.2 |
| 正则化系数 | 0.1 |
| 优化器 | Adam |
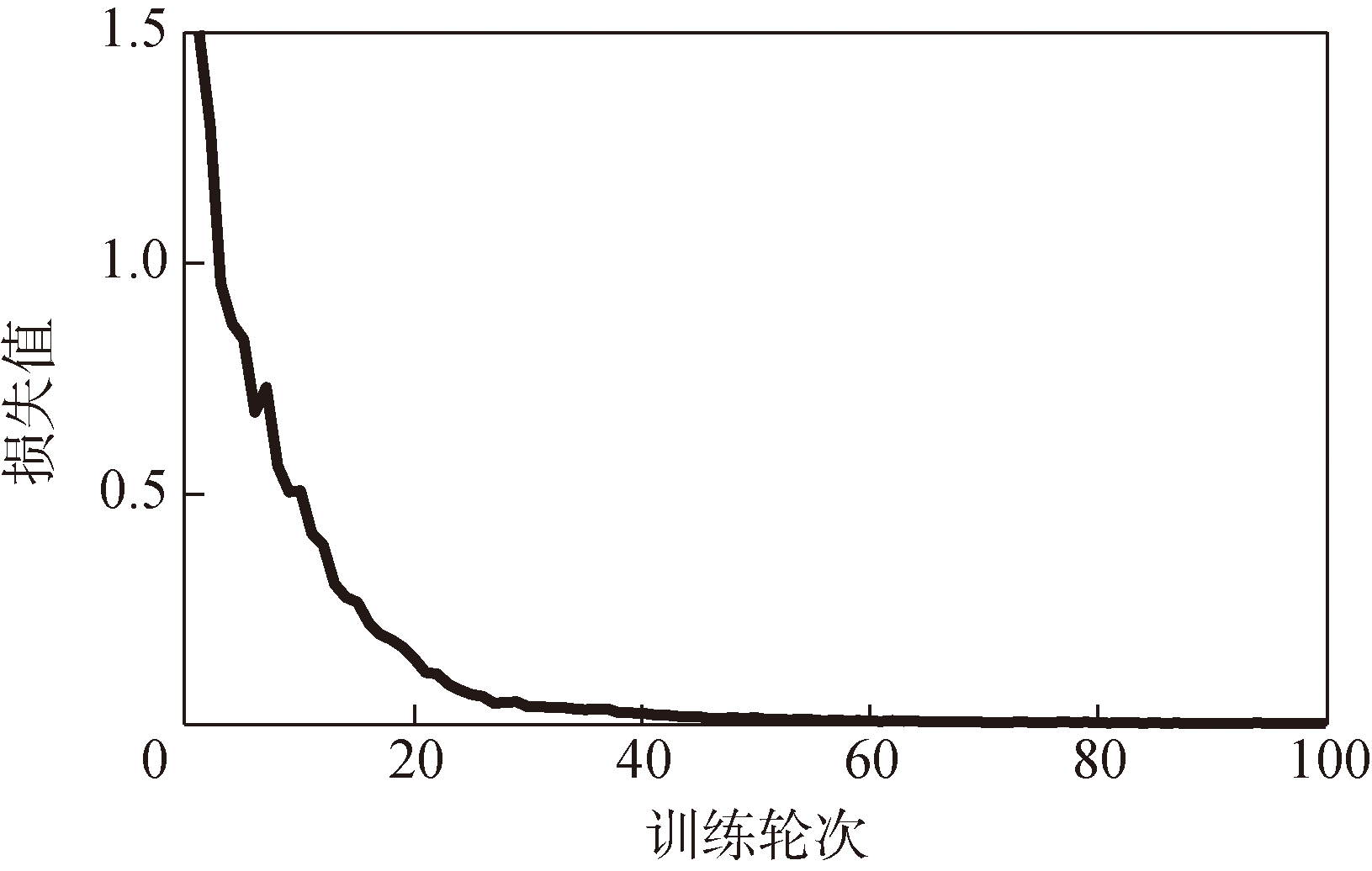
Fig.8 Loss during training of LSTM network
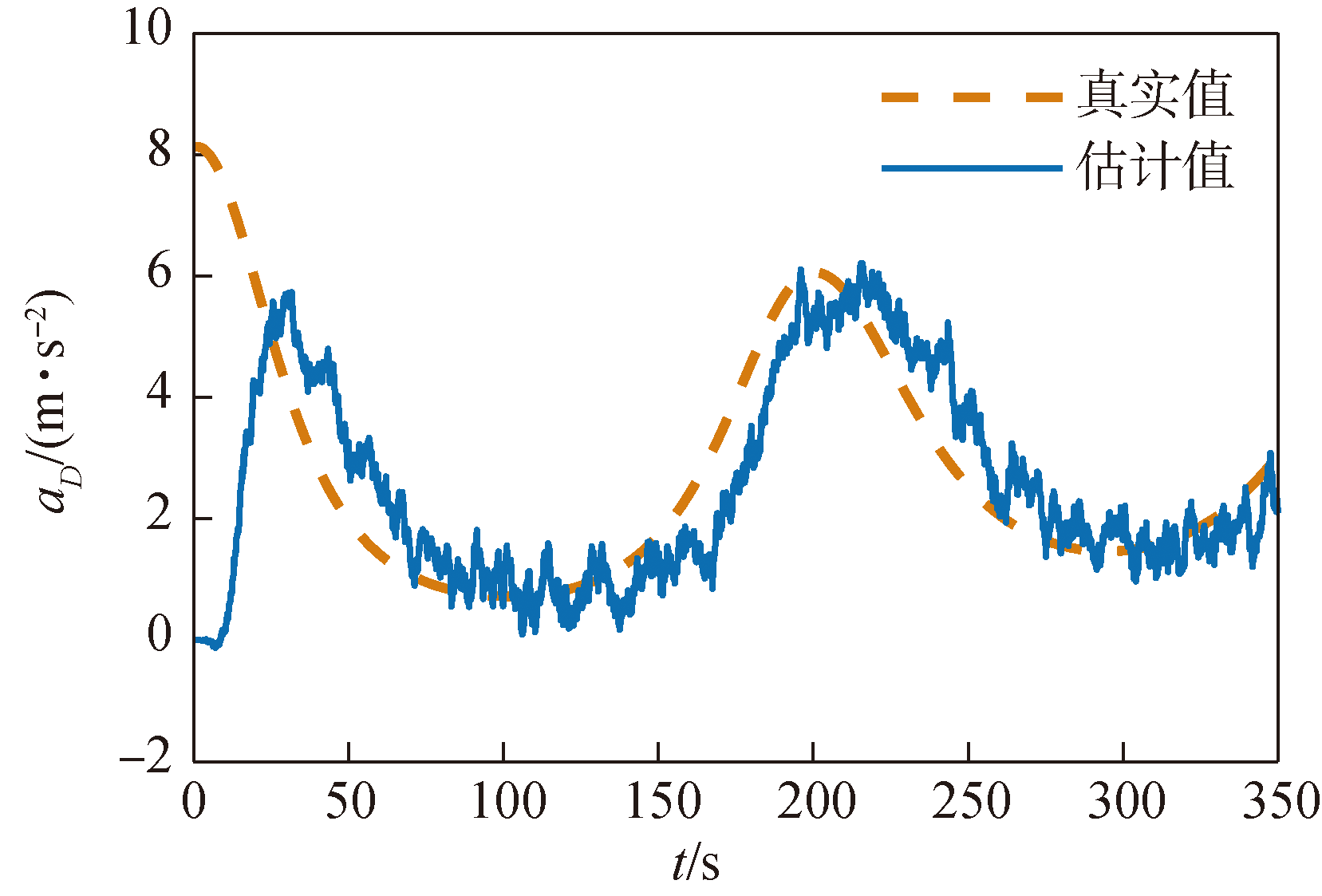
Fig.9 Tracking results of aerodynamic drag acceleration
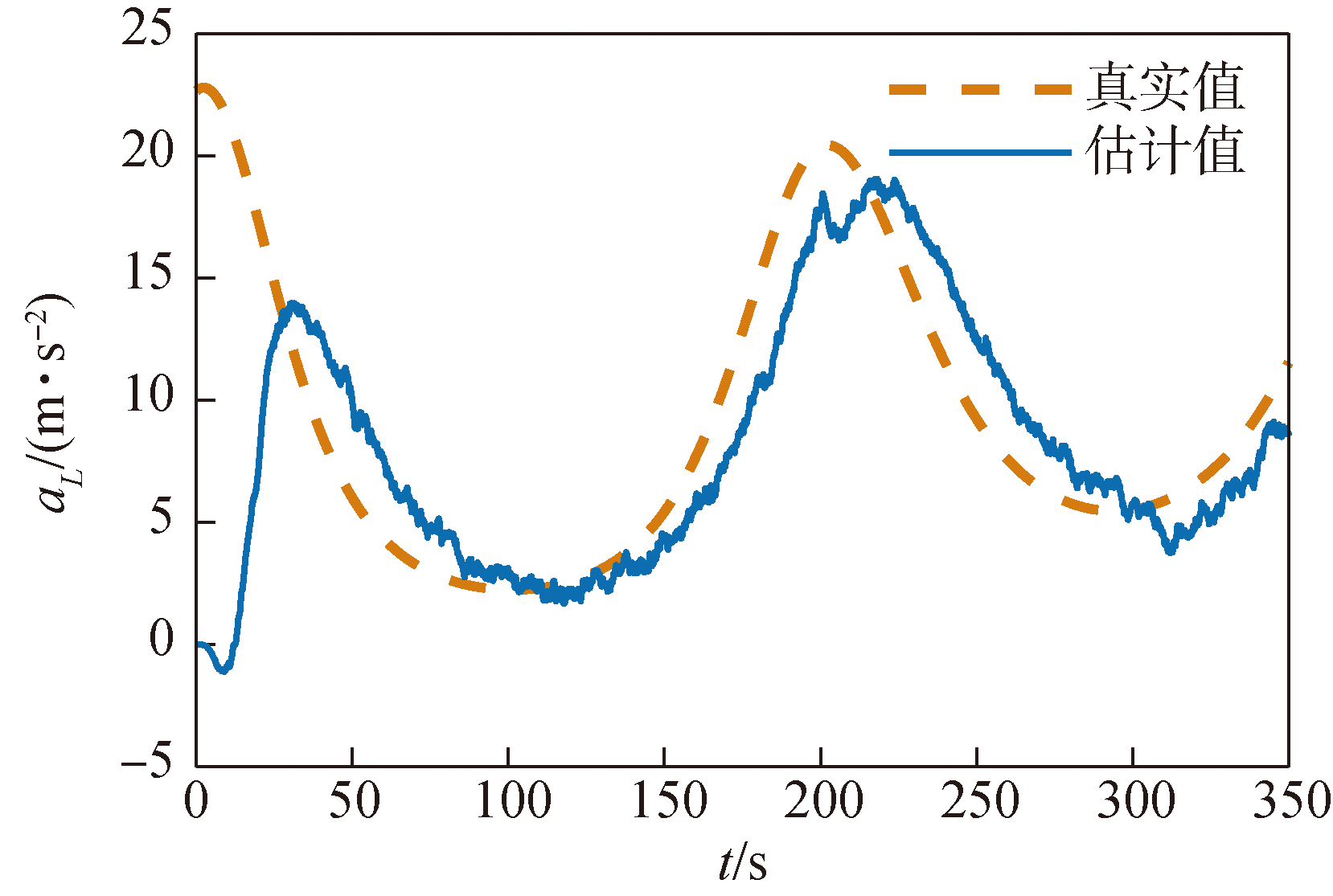
Fig.10 Tracking results of aerodynamic lift acceleration
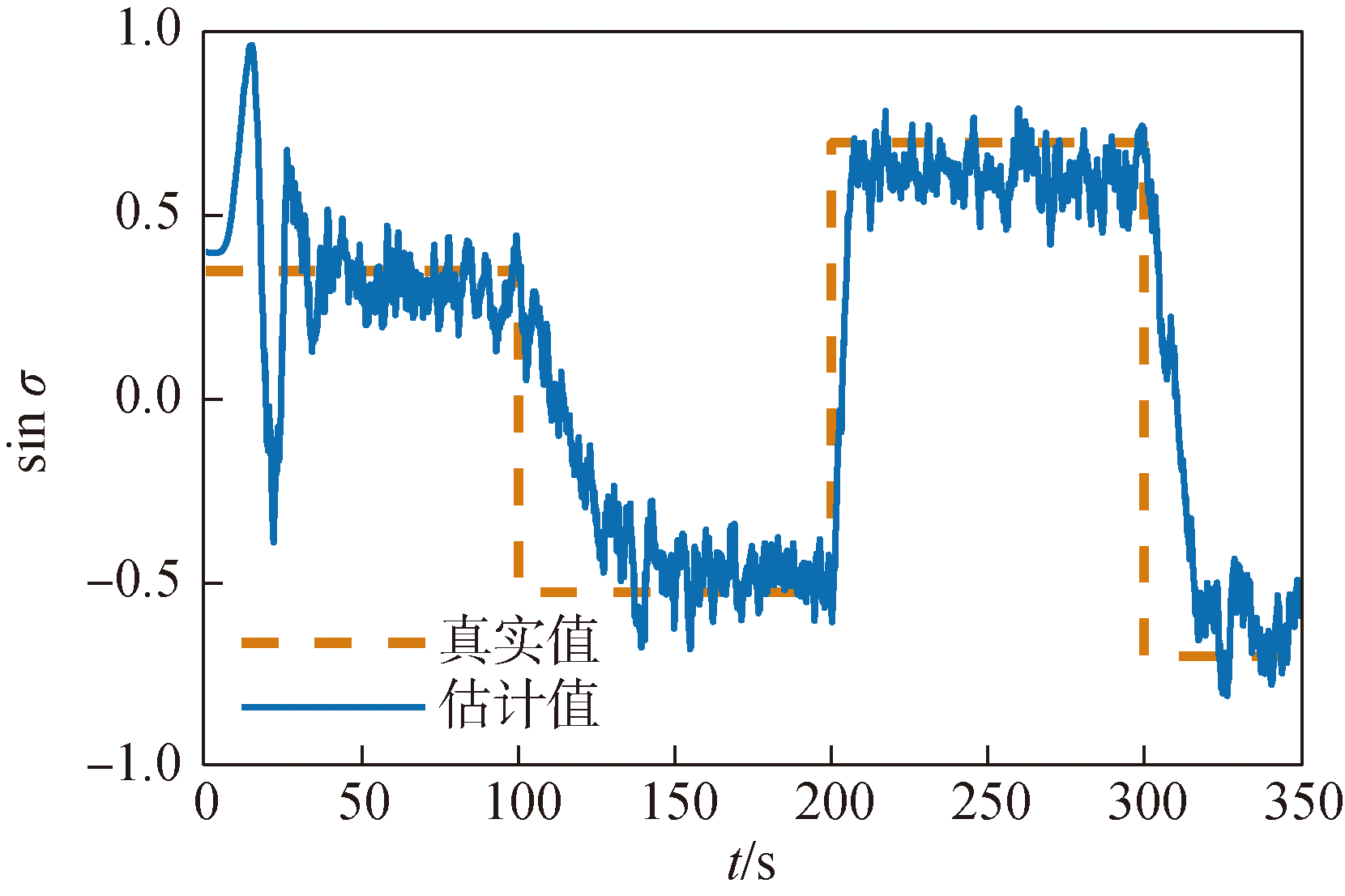
Fig.11 Tracking results of sinusoidal quantity of bank angle
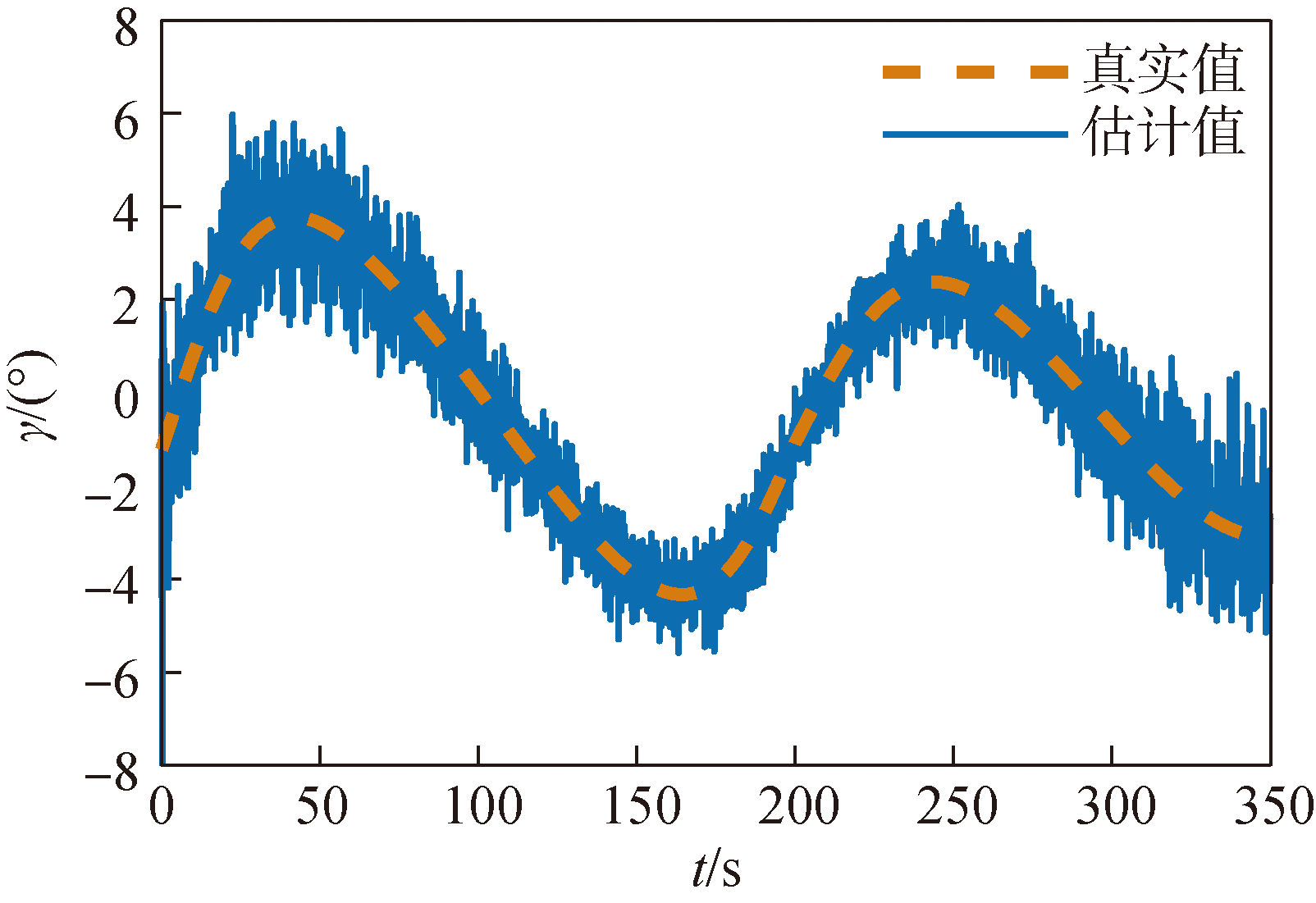
Fig.12 Estimated result of target flight-path angle
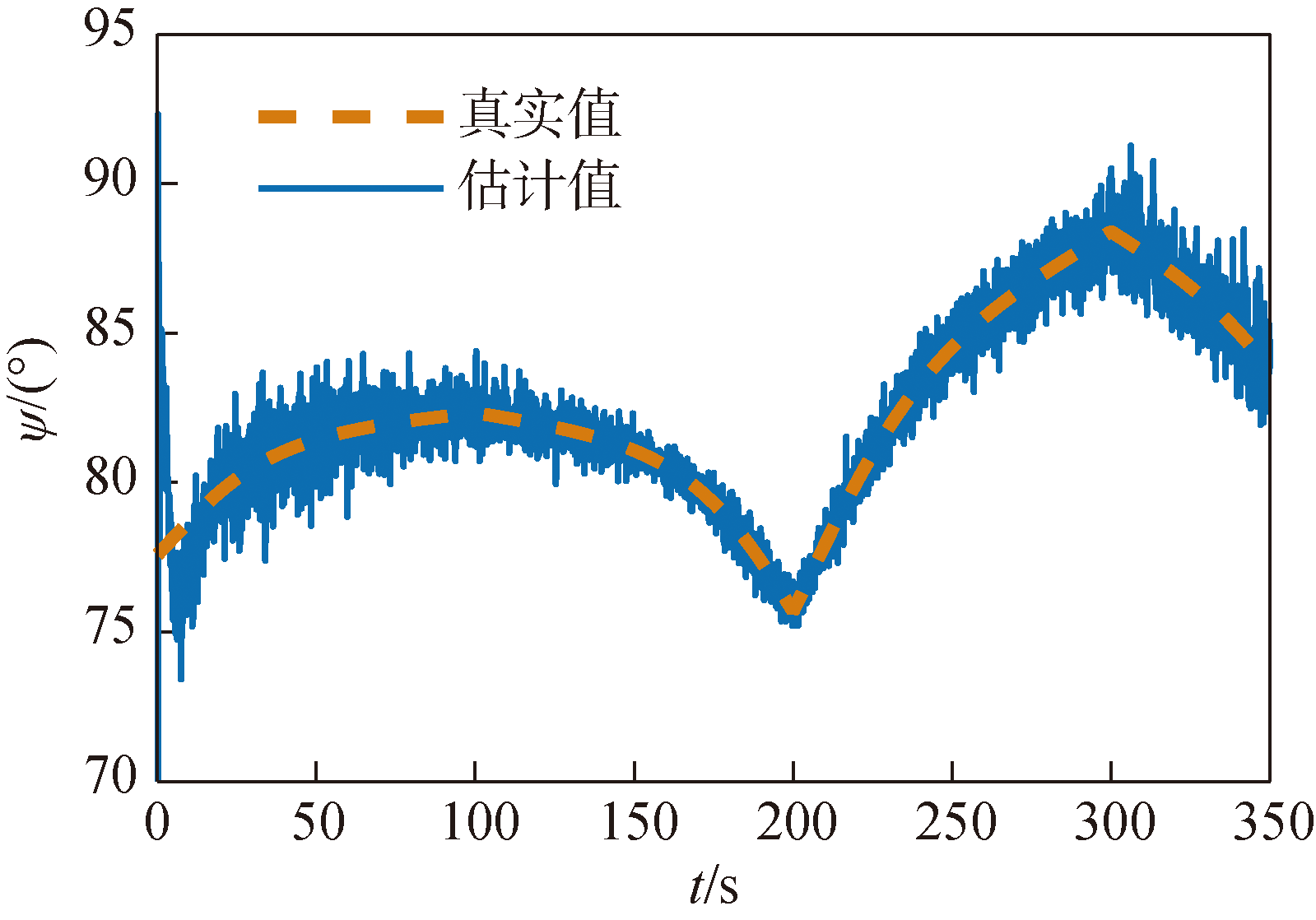
Fig.13 Estimated result of target heading angle
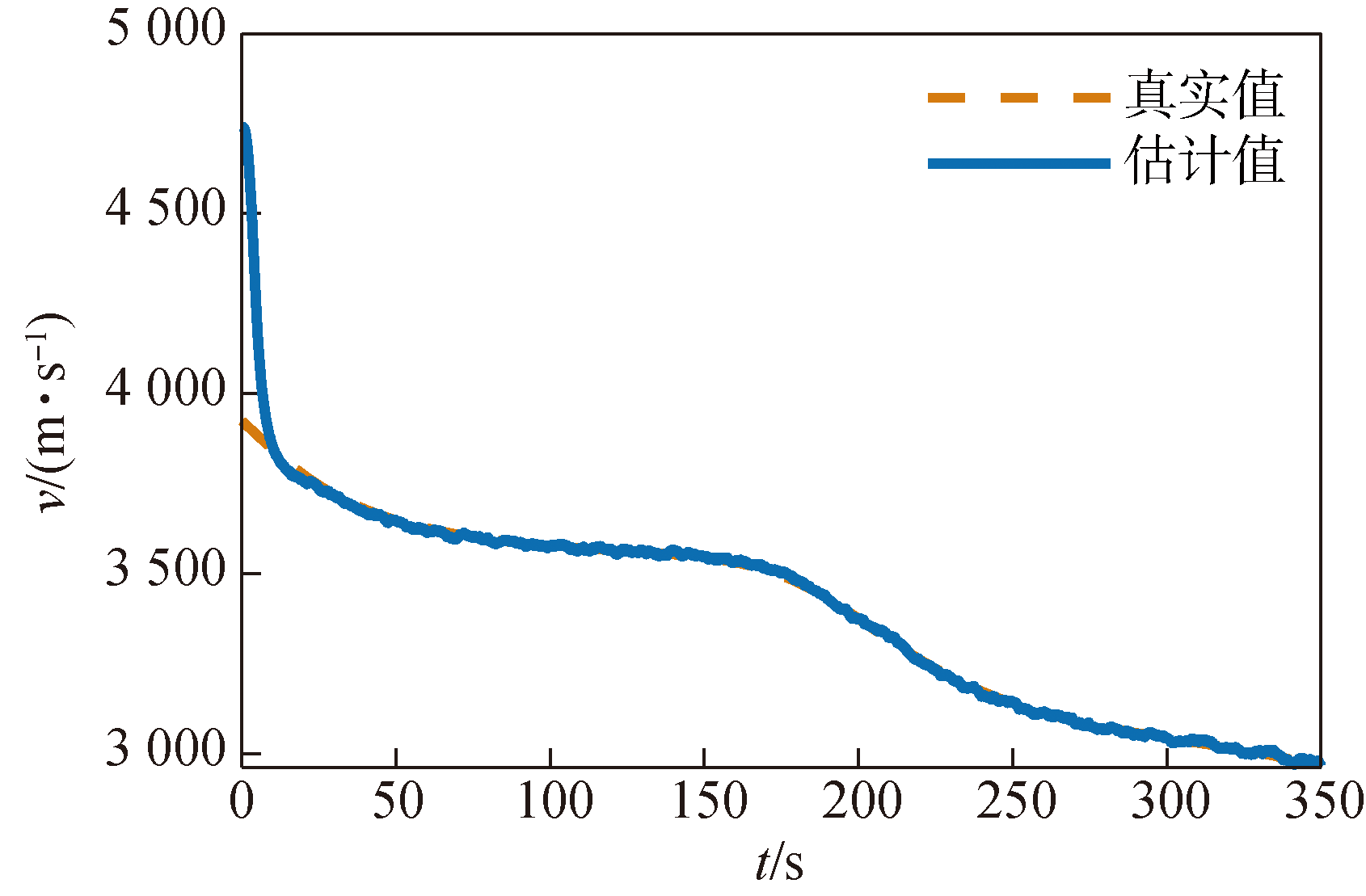
Fig.14 Estimated result of target speed
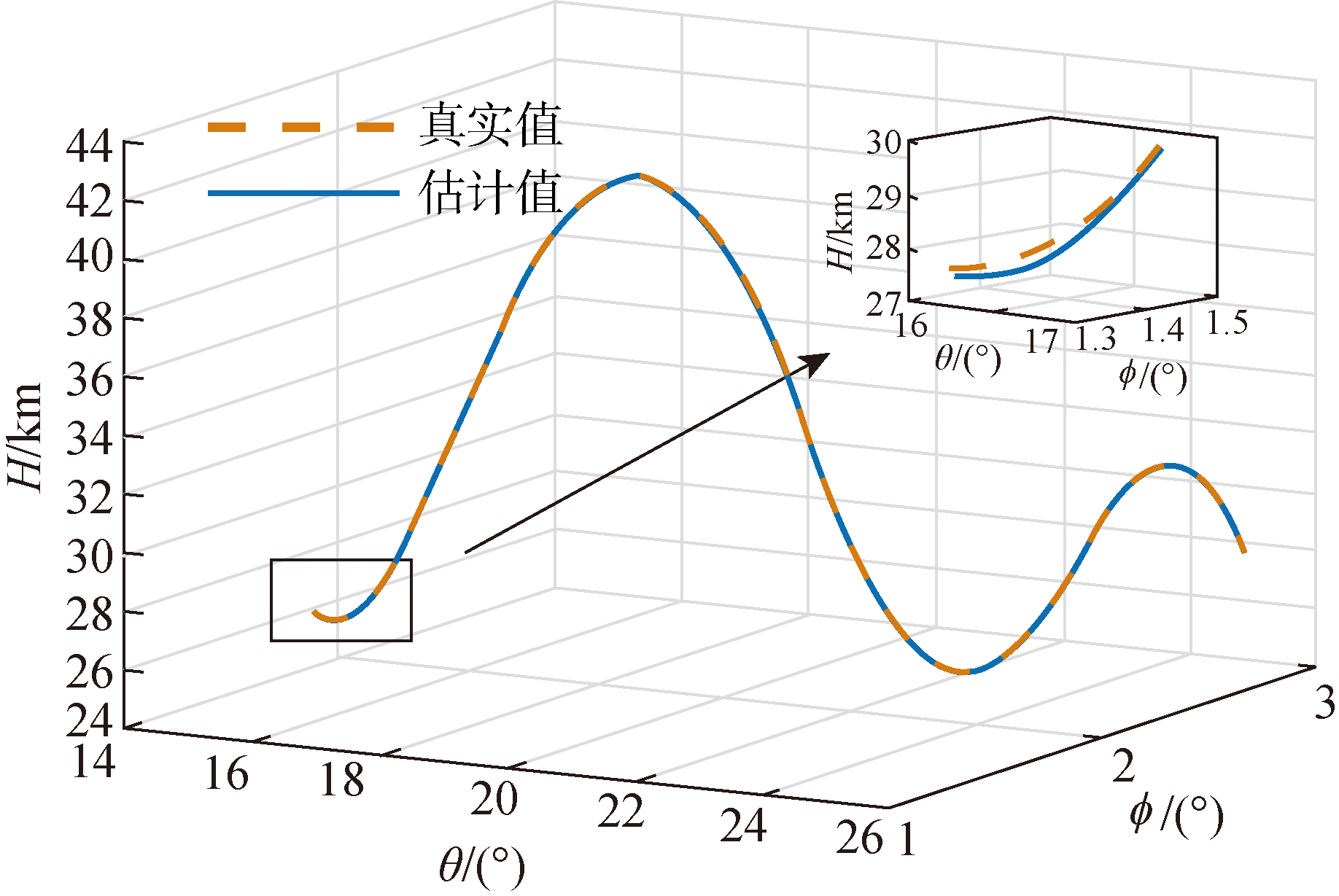
Fig.15 Estimated result of target spatial location
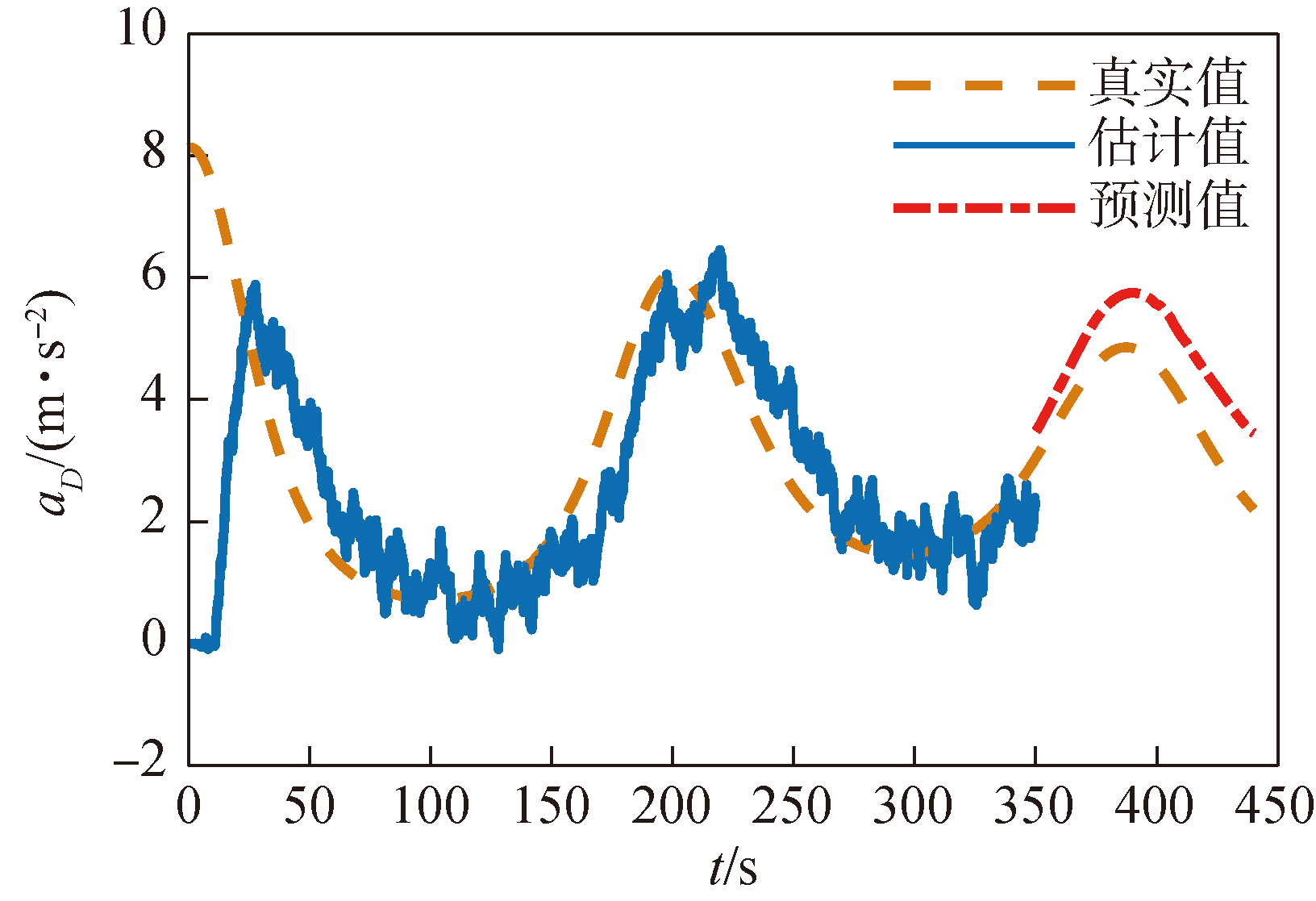
Fig.16 Predicted results of aerodynamic drag acceleration
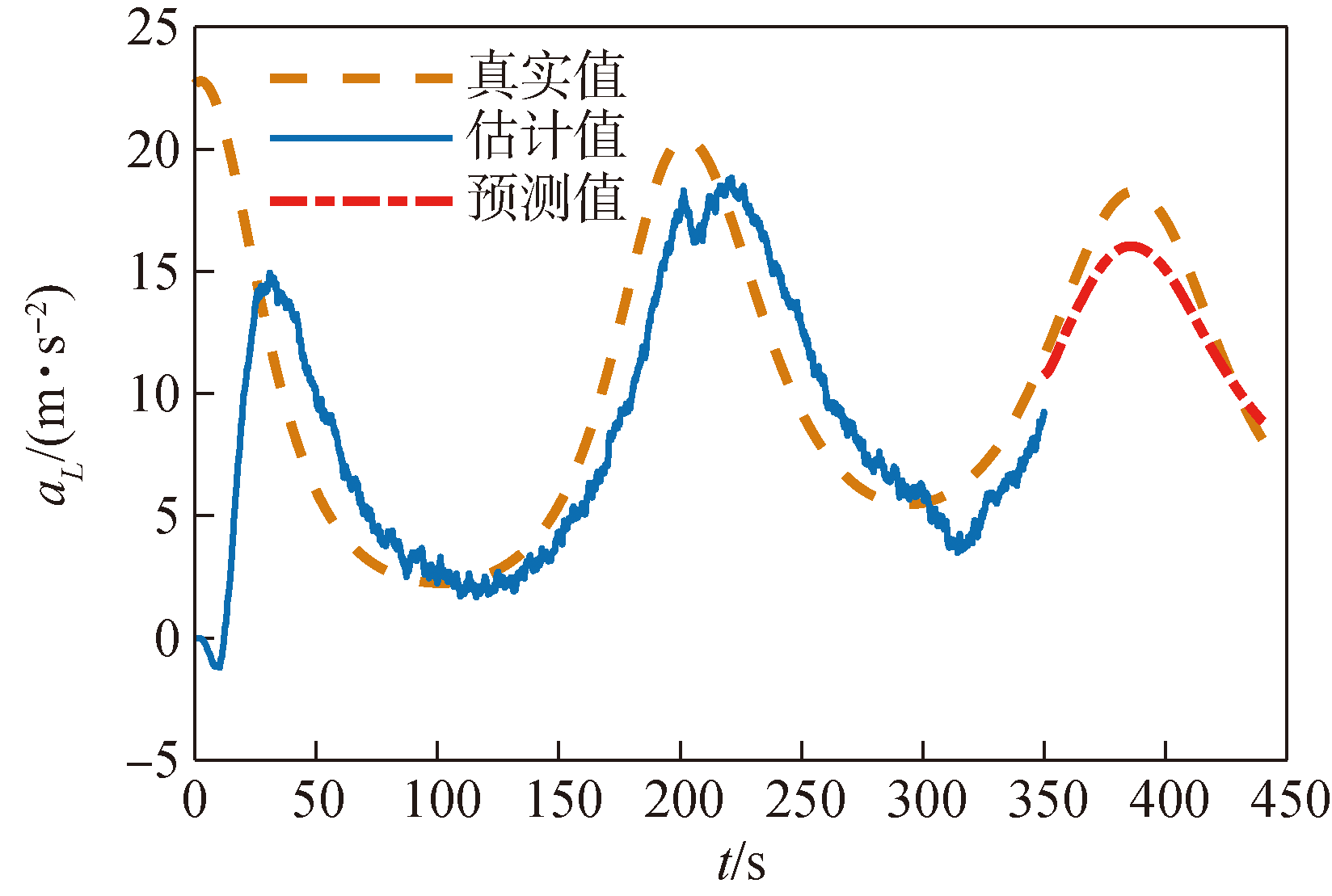
Fig.17 Predicted result of aerodynamic lift acceleration
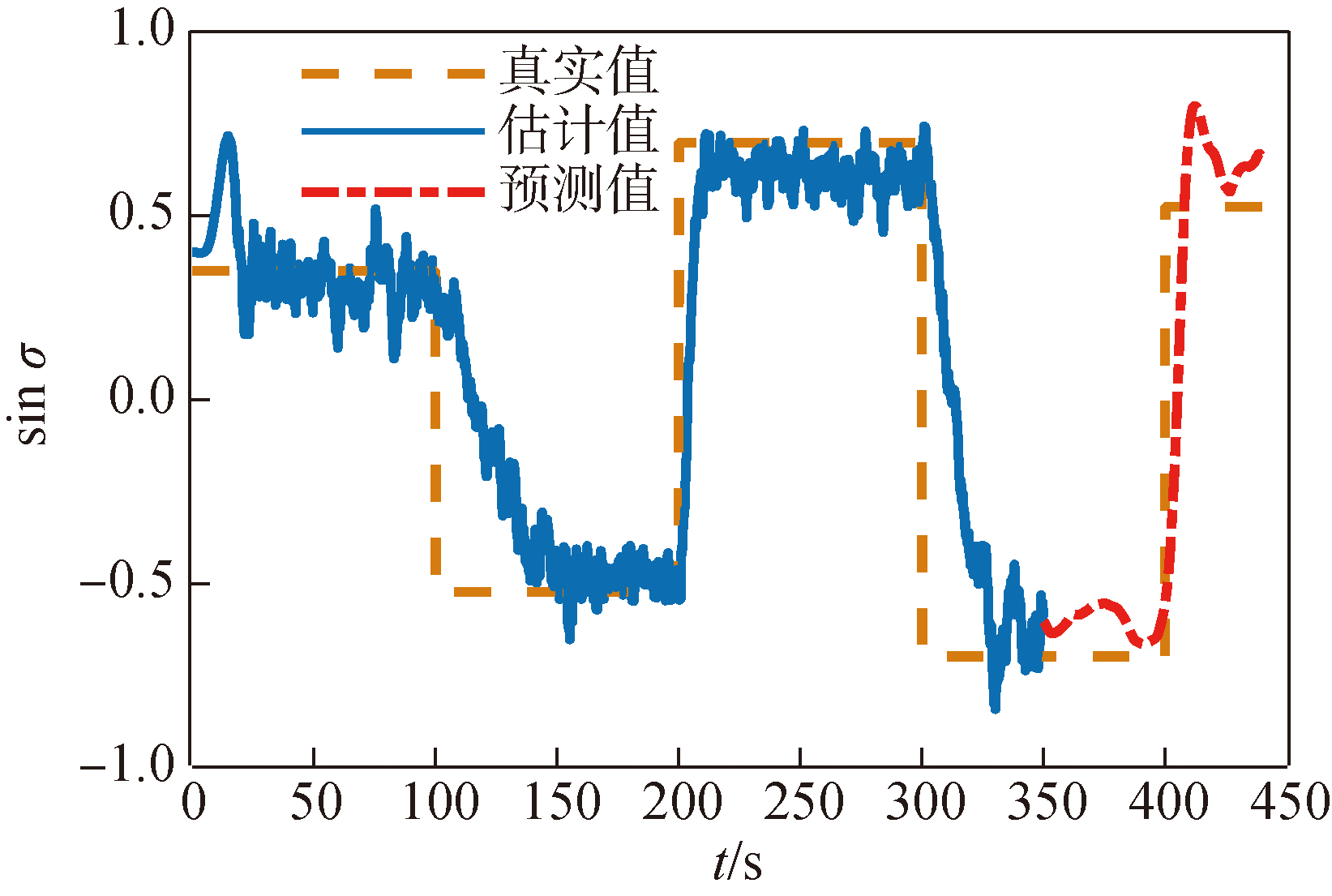
Fig.18 Predicted results of sinusoidal quantity of bank angle
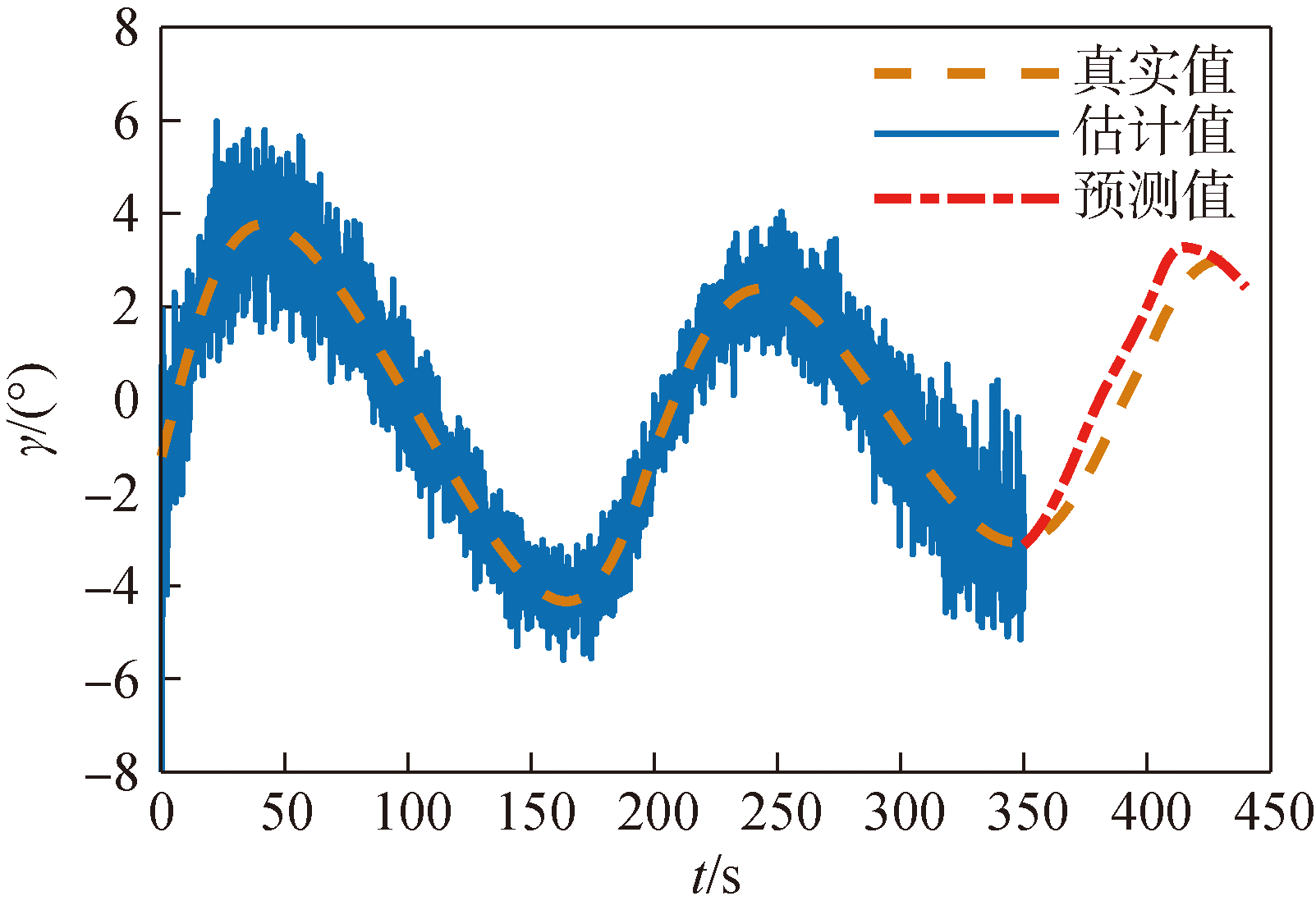
Fig.19 Predicted result of target flight-path angle
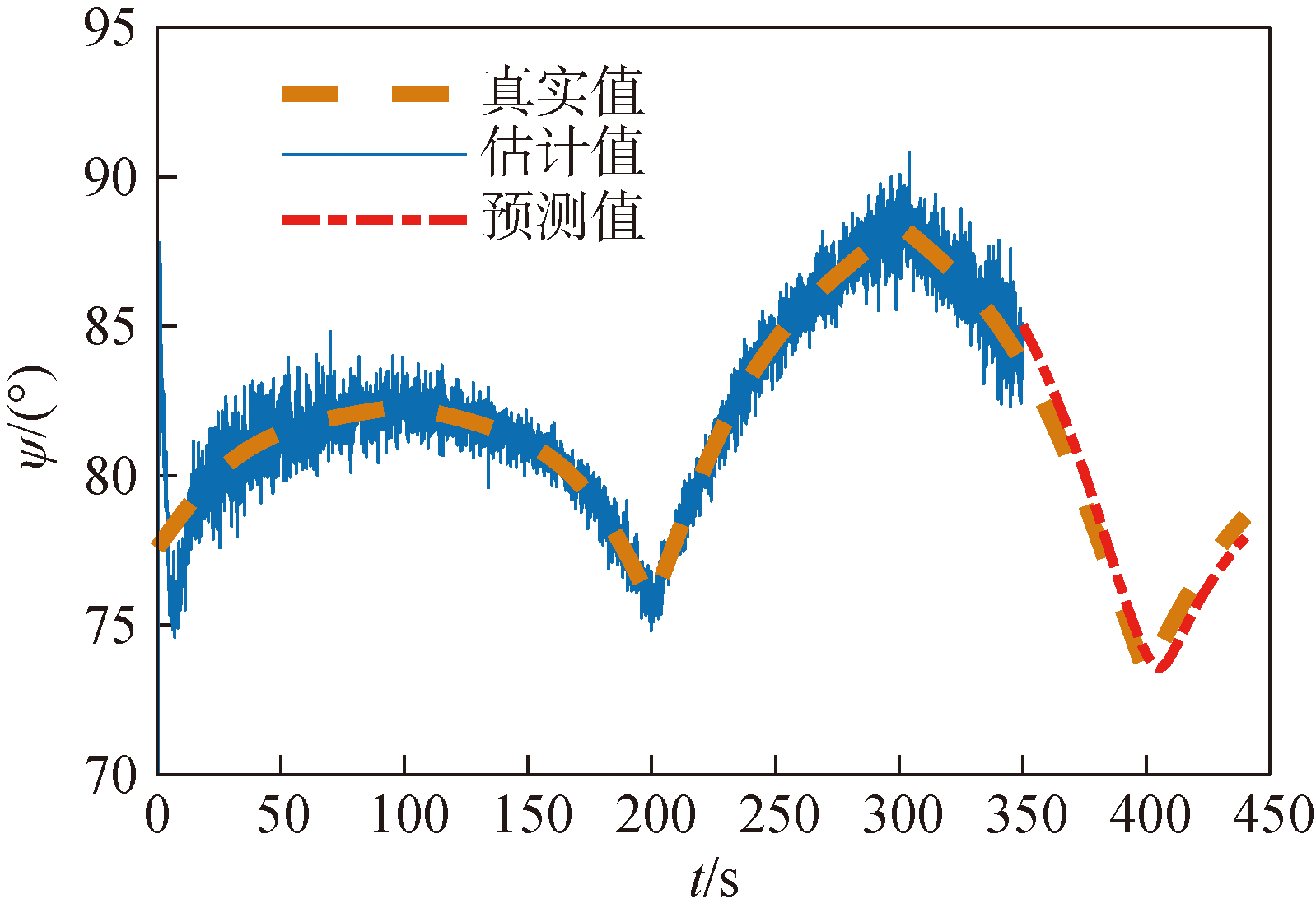
Fig.20 Predicted result of target heading angle
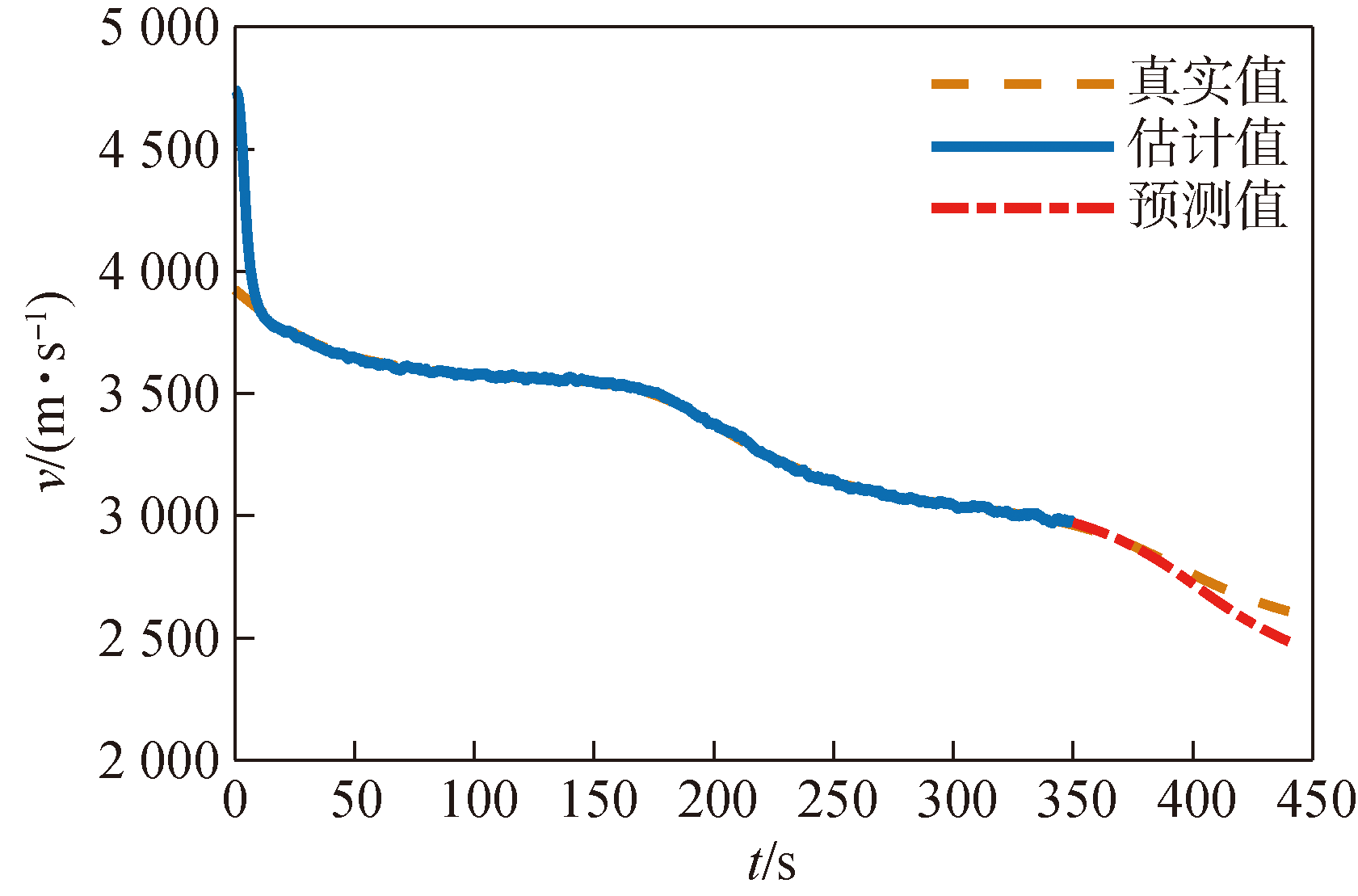
Fig.21 Predicted result of target speed
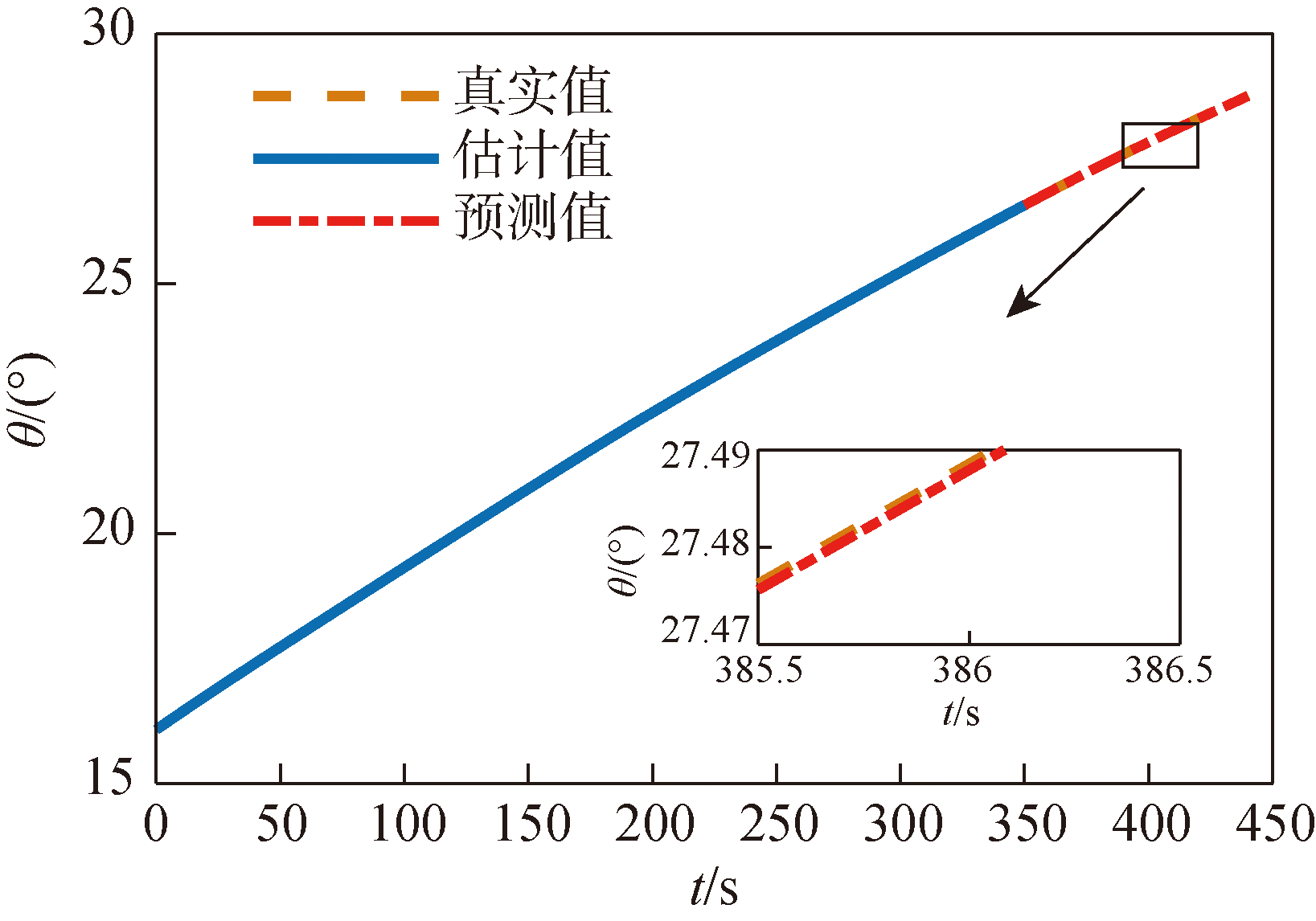
Fig.22 Variation of target trajectory longitude over time
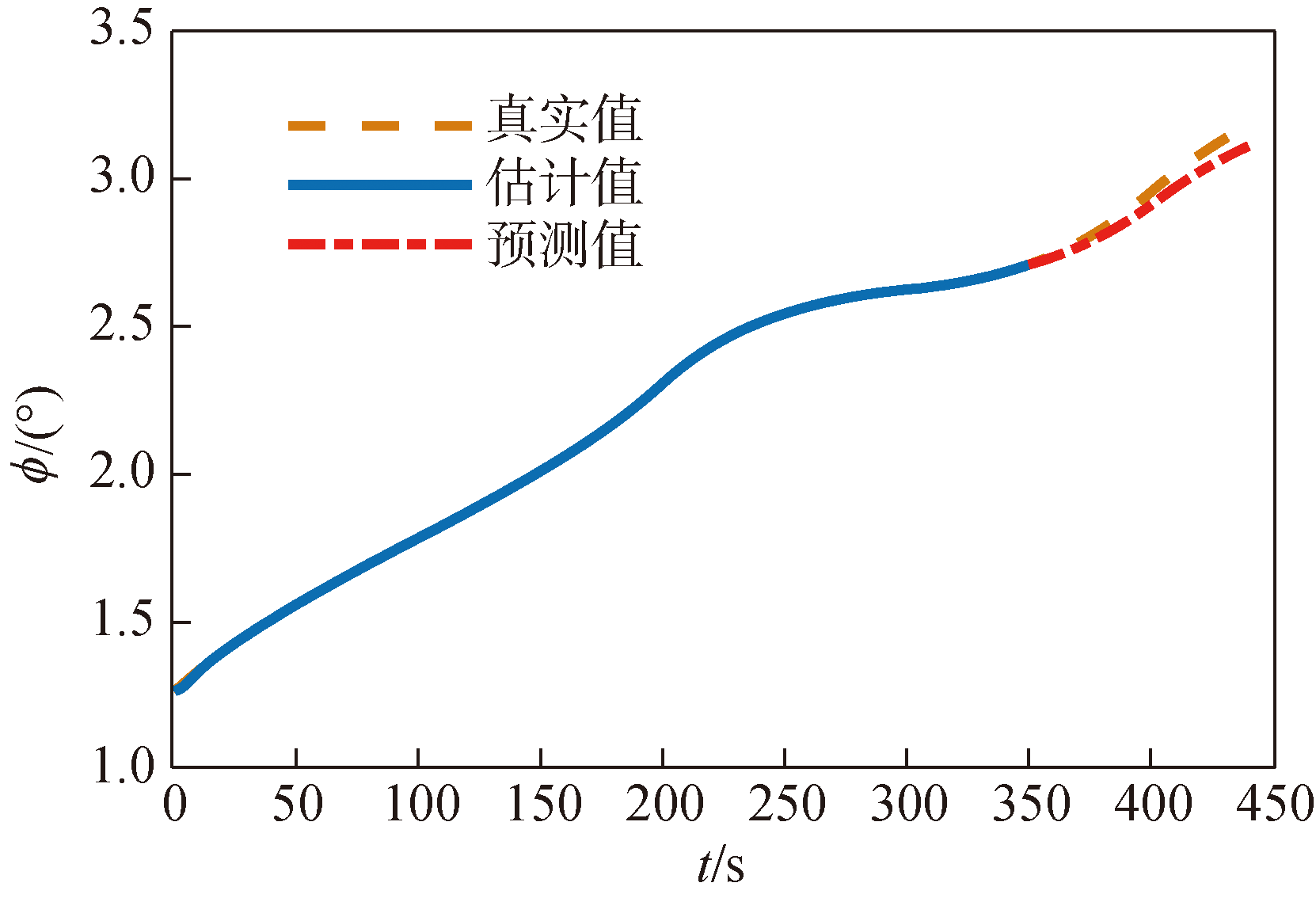
Fig.23 Variation of target trajectory latitude over time
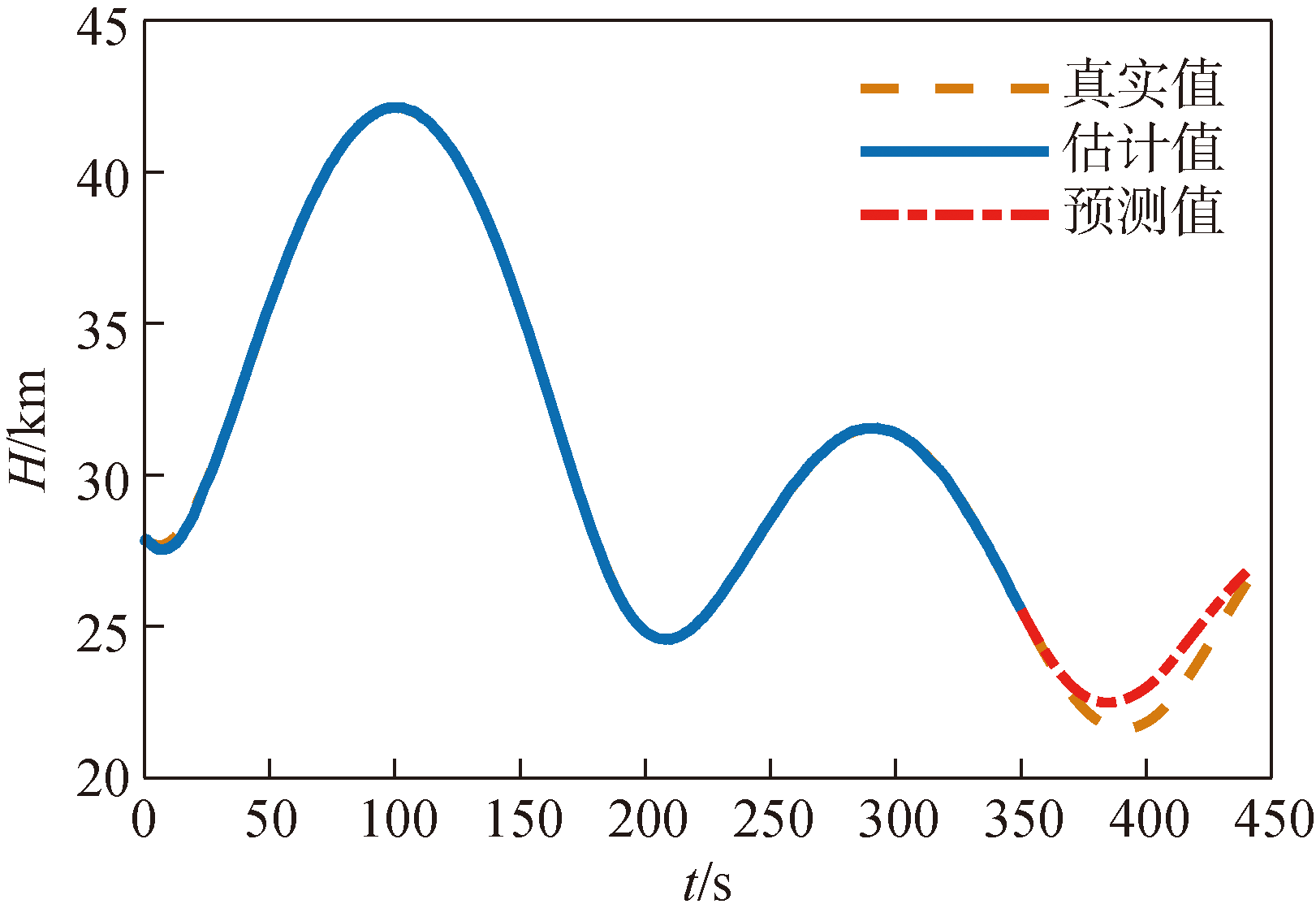
Fig.24 Variation of target trajectory height over time
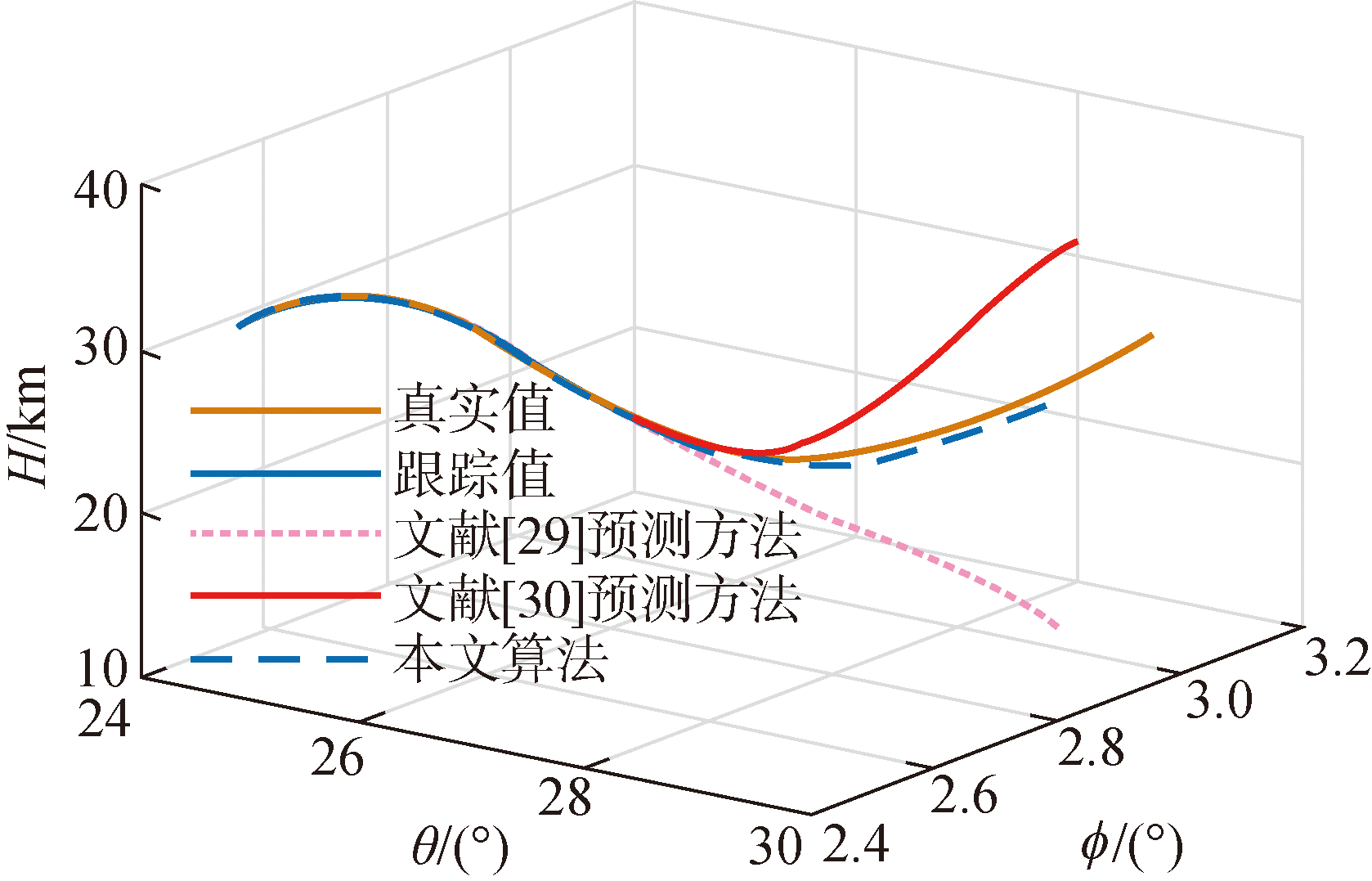
Fig.25 Result comparison of different predicting methods

Fig.26 Results of Monte Carlo simulations

Fig.27 Monte Carlo simulation results of horizontal plane

Fig.28 RMSEs corresponding to Monte Carlo simulations
| 方法 | 在线训练耗时/s | 在线预测耗时/s |
|---|---|---|
| 文献[ | 0.0089 | |
| 文献[ | 0.2117 | |
| 本文方法 | 13.6 | 0.2932 |
Table 3 Average online prediction time for three methods
| 方法 | 在线训练耗时/s | 在线预测耗时/s |
|---|---|---|
| 文献[ | 0.0089 | |
| 文献[ | 0.2117 | |
| 本文方法 | 13.6 | 0.2932 |
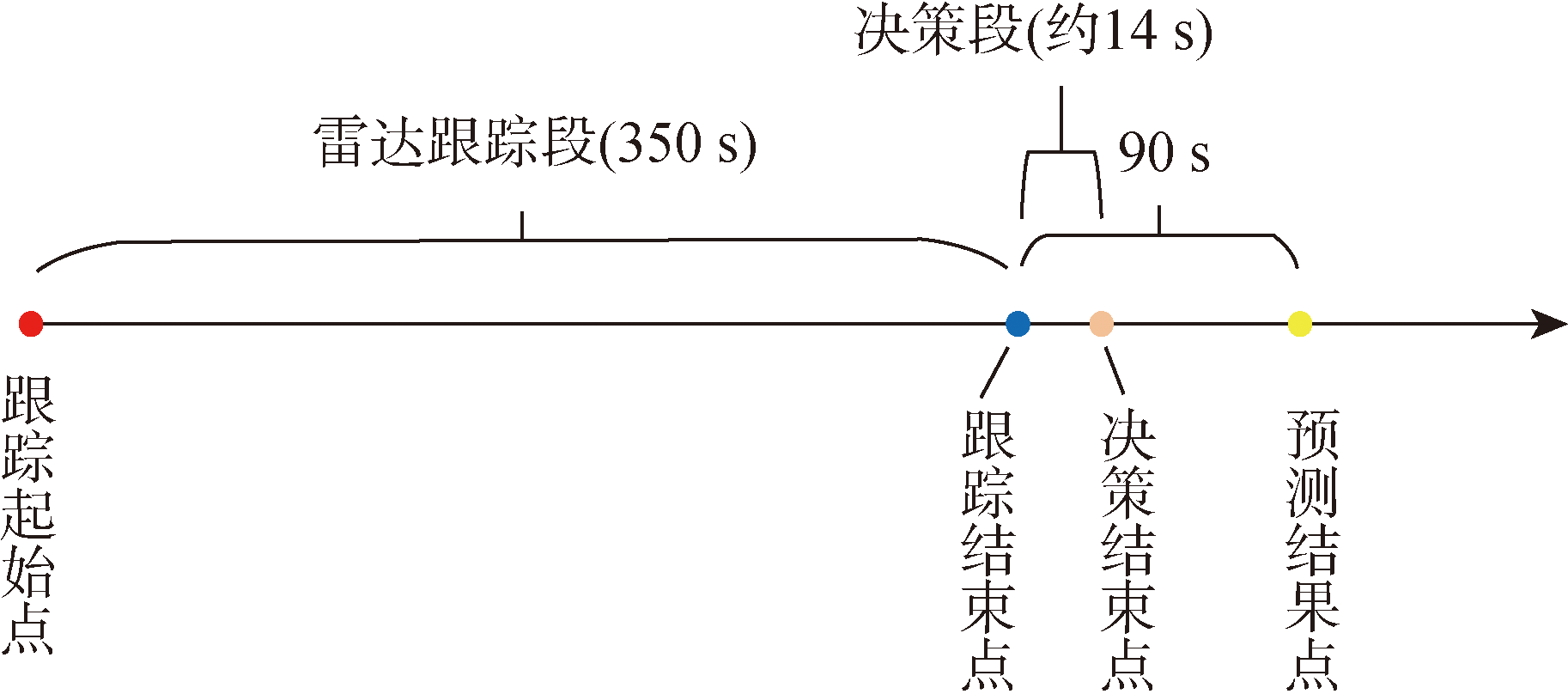
Fig.29 Tracking-decision-Pprediction timeline
| [1] |
|
| [2] |
|
| [3] |
邵雷, 雷虎民, 赵锦. 临近空间高超声速飞行器轨迹预测方法研究进展[J] 航空兵器, 2021, 28(2):34-39.
|
|
|
|
| [4] |
张凯, 熊家军, 李凡, 等. 基于意图推断的高超声速滑翔目标贝叶斯轨迹预测[J]. 宇航学报, 2018, 39(11):1258-1265.
|
|
|
|
| [5] |
|
| [6] |
韩宇辰, 王松艳, 权申明, 等. 基于贝叶斯推断的高超声速滑翔目标轨迹预测方法[J]. 控制与决策, 2024, 39(11):3736-3744.
|
|
|
|
| [7] |
李佳丽, 郭杰, 唐胜景. 面向高超声速滑翔目标的多模型多意图融合轨迹预测[J]. 宇航学报, 2024, 45(2):167-180.
|
|
|
|
| [8] |
韩春耀, 熊家军, 张凯, 等. 高超声速飞行器分解集成轨迹预测算法[J]. 系统工程与电子技术, 2018, 40(1):151-158.
|
|
|
|
| [9] |
寇英信, 奚之飞, 徐安, 等. 基于改进核极限学习机和集成学习理论的目标机动轨迹预测[J]. 国防科技大学学报, 2021, 43(5):23-35.
|
|
|
|
| [10] |
胡星志, 王旭, 江雄, 等. 基于高斯过程回归的高超声速飞行器不确定轨迹预测[J]. 空天技术, 2022(4):49-61.
|
|
|
|
| [11] |
张洪波, 黄景帅, 李广华, 等. 典型控制规律滑翔飞行器的轨迹预测方法[J]. 现代防御技术, 2017, 45(4):112-118.
|
|
|
|
| [12] |
魏喜庆, 顾龙飞, 李瑞康. 基于Singer模型的高超声速飞行器轨迹跟踪与预测[J]. 航天控制, 2017, 35(4):62-72.
|
|
|
|
| [13] |
翟岱亮, 雷虎民, 李炯, 等. 基于自适应IMM的高超声速飞行器轨迹预测[J]. 航空学报, 2016, 37(11):3466-3475.
|
|
|
|
| [14] |
|
| [15] |
吉瑞萍, 张程祎, 梁彦, 等. 基于LSTM的弹道导弹主动段轨迹预报[J]. 系统工程与电子技术, 2022, 44(6):1968-1976.
|
|
|
|
| [16] |
杨春伟, 刘炳琪, 王继平, 等. 基于注意力机制的高超声速飞行器LSTM智能轨迹预测[J]. 兵工学报, 2022, 43(增刊2):78-86.
|
|
|
|
| [17] |
|
| [18] |
张堃, 杜睿怡, 时昊天, 等. 基于Mogrifier-BiGRU的飞行器轨迹预测[J]. 兵工学报, 2024, 45(2):373-384.
|
|
|
|
| [19] |
李强. 高超声速滑翔飞行器再入制导控制技术研究[D]. 北京: 北京理工大学, 2015.
|
|
|
|
| [20] |
张君彪, 熊家军, 兰旭辉, 等. 一种高超声速滑翔飞行器轨迹智能预测方法[J]. 宇航学报, 2022, 43(4):413-422.
|
|
|
|
| [21] |
朱建文. 助推-滑翔飞行器自适应全程制导方法研究[D]. 长沙: 国防科学技术大学, 2016.
|
|
|
|
| [22] |
兰旭辉, 熊家军, 张君彪, 等. 临近空间高超声速飞行器轨迹预测技术[M]. 武汉: 华中科技大学出版社, 2022.
|
|
|
|
| [23] |
程云鹏. 高超声速滑翔飞行器轨迹估计和预报方法研究[D]. 西安: 西北工业大学, 2021.
|
|
|
|
| [24] |
黄景帅. 高超声速滑翔目标跟踪与拦截制导方法研究[D]. 长沙: 国防科学技术大学, 2020.
|
|
|
|
| [25] |
李佳兴, 袁利, 张聪. 天基单视线测量目标轨道可观性分析及确定方法[J]. 航空学报, 2025, 46(3):629484.
|
|
|
|
| [26] |
|
| [27] |
|
| [28] |
李广华. 高超声速滑翔飞行器运动特性分析及弹道跟踪预报方法研究[D]. 长沙: 国防科学技术大学, 2016.
|
|
|
|
| [29] |
李世杰, 雷虎民, 周池军, 等. 基于控制变量估计的高超声速再入滑翔目标轨迹预测算法[J]. 系统工程与电子技术, 2020, 42(10):2320-2327.
|
|
|
|
| [30] |
苏雨, 张龙政腾, 赵国宏, 等. 基于GRU-KAN的高速飞行器轨迹预测方法[J]. 航空兵器, 2024, 31(6):44-49.
|
|
|
|
| [31] |
郑建成, 谭贤四, 曲智国, 等. 高超声速滑翔飞行器特性分析与防御发展趋势[J]. 飞航导弹, 2021(11):52-57,70.
|
|
|
|
| [32] |
赵良玉, 雍恩米, 王波兰. 反临近空间高超声速飞行器若干研究进展[J]. 宇航学报, 2020, 41(10):1239-1250.
|
|
|
| [1] | XIAO Liujun, LI Yaxuan, LIU Xinfu. Adaptive Terminal Guidance for Hypersonic Gliding Vehicles Using Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(2): 240222-. |
| [2] | ZHANG Kun, DU Ruiyi, SHI Haotian, HUA Shuai. Prediction of Aircraft Trajectory Based on Mogrifier-BiGRU [J]. Acta Armamentarii, 2024, 45(2): 373-384. |
| [3] | CHEN Gang, WANG Guoxin, MING Zhenjun, CHEN Wang, SHANG Xiwen, YAN Yan. Armored Vehicle Cluster Trajectory Prediction Method Based on DBSCAN Clustering Algorithm and LSTM Network [J]. Acta Armamentarii, 2024, 45(12): 4295-4310. |
| [4] | LIAN Jing, DING Rongqi, LI Linhui, WANG Xuecheng, ZHOU Yafu. Vehicle Trajectory Prediction Method Based on Graph Models and Attention Mechanism [J]. Acta Armamentarii, 2023, 44(7): 2162-2170. |
| [5] | REN Jihuan, WU Xiang, BO Yuming, WU Panlong, HE Shan. Ballistic Trajectory Prediction Based on Context-enhanced Long Short-Term Memory Network [J]. Acta Armamentarii, 2023, 44(2): 462-471. |
| [6] | ZHENG Zhiwei, GUAN Xueyuan, FU Jian, MA Xunqiong, YIN Shang. Projectile Trajectory Prediction Based on CNN-LSTM Model [J]. Acta Armamentarii, 2023, 44(10): 2975-2983. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||