
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (5): 240595-.doi: 10.12382/bgxb.2024.0595
Previous Articles Next Articles
YUAN Zilong1, HE Fei1,*( ), ZHAO Jianbo2,3, WANG Shaoshen3, JIANG Mingming1
), ZHAO Jianbo2,3, WANG Shaoshen3, JIANG Mingming1
Received:2024-07-18
Online:2025-05-07
Contact:
HE Fei
CLC Number:
YUAN Zilong, HE Fei, ZHAO Jianbo, WANG Shaoshen, JIANG Mingming. Optimization Method of Carrier-borne Aircraft Support Operation Assignment and Ammunition Transport Scheduling[J]. Acta Armamentarii, 2025, 46(5): 240595-.
Add to citation manager EndNote|Ris|BibTeX
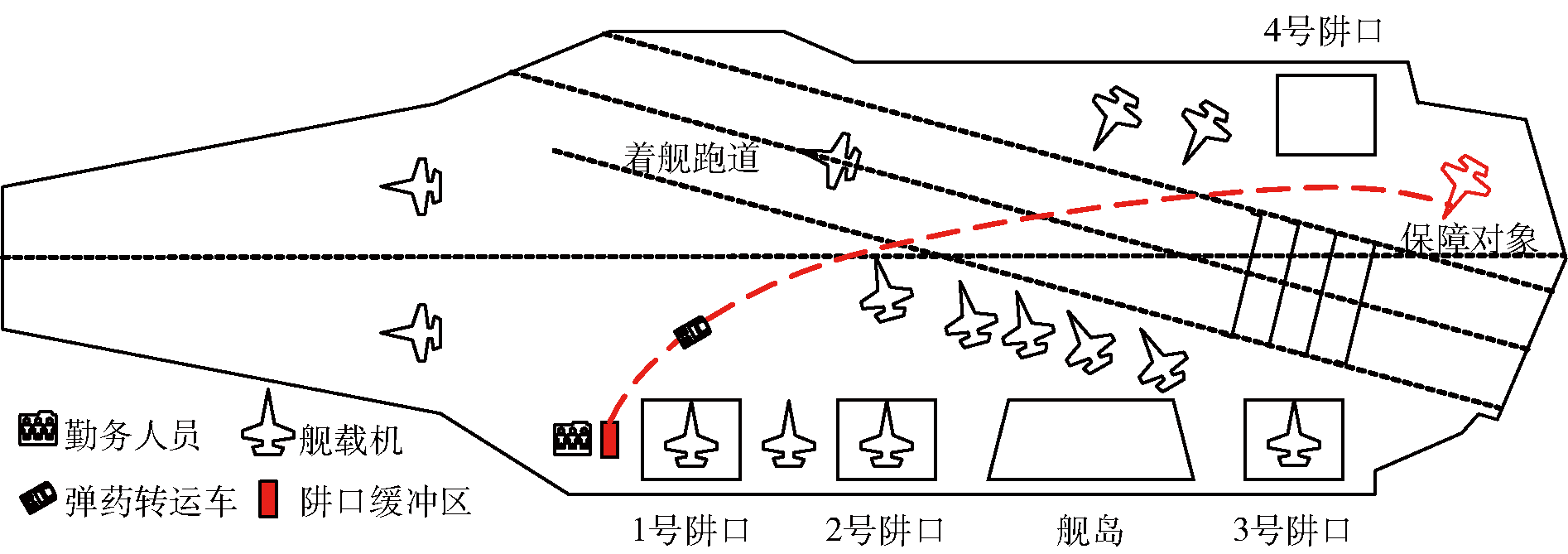
Fig.1 Schematic diagram of ammunition support operation on the aircraft carrier deck
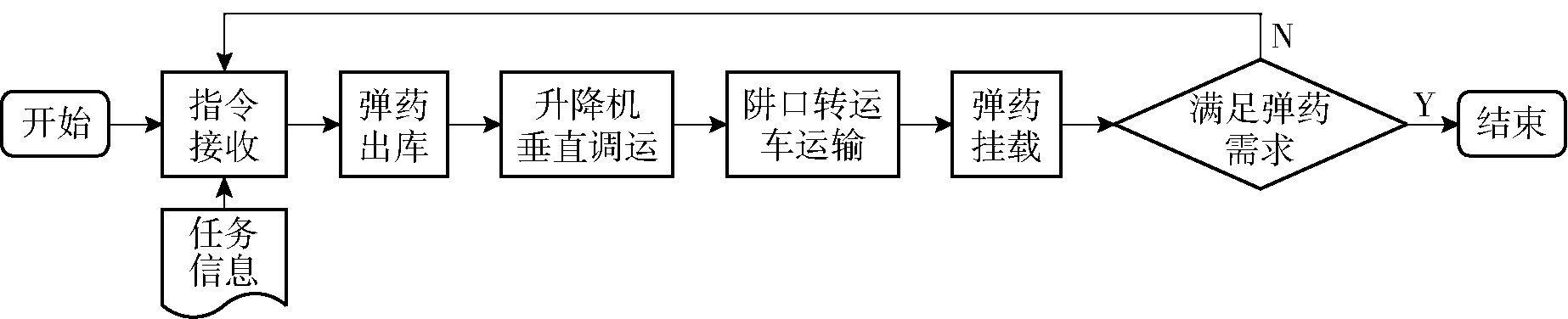
Fig.2 Schematic diagram of operation process of carrier-borne aircraft ammunition support

Fig.3 Expansion treatment of carrier-based aircraft
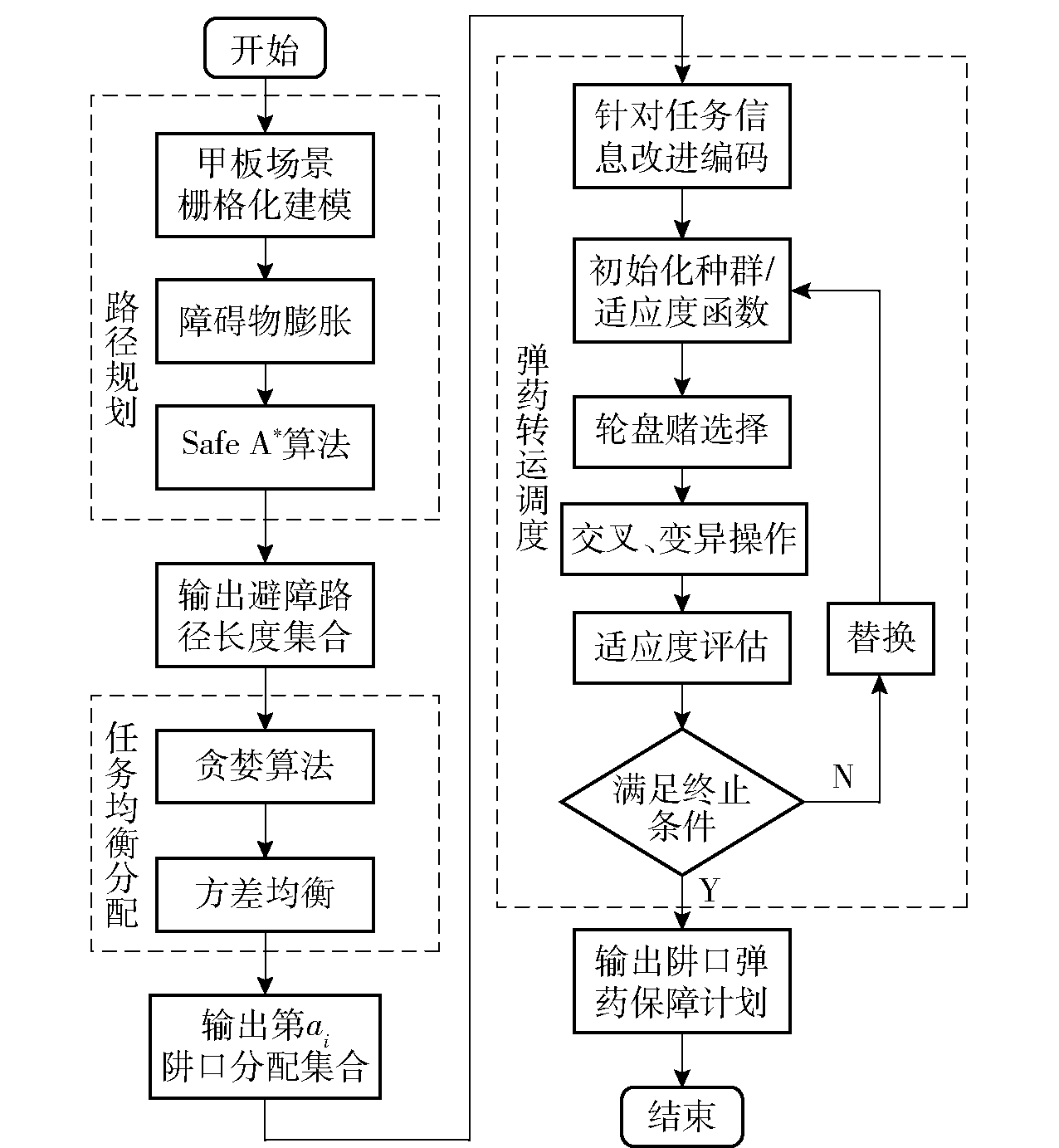
Fig.4 Algorithm flow chart

Fig.5 Example of chromosome code
| 算法: | 车辆调度冲突处理与优先级校验修正 | |
|---|---|---|
| 输入: | 任务列表tasks (包含优先级信息),车辆使用情况vehicle_usage,转运时间transport_times,车辆列表vehicles | |
| 输出: | 校正后的方案安排 | |
| 1 | 初始化车辆使用表vehicle_usage | |
| 2 | 对任务列表tasks按优先级从高到低排序 | |
| 3 | For task in tasks: | |
| 4 | 取出任务的转运车vehicle,开始时间start_time,优先级priority | |
| 5 | If vehicle在使用中: | |
| 6 | 获取上一次的结束时间last_end_time | |
| 7 | 计算回程空窗期=last_end_time + transport_times[vehicle] | |
| 8 | If start_time <回程空窗期: | |
| 9 | 检查当前任务与占用任务的优先级 | |
| 10 | If当前任务优先级较高: | |
| 11 | 将占用任务的start_time推迟到回程空窗期 | |
| 12 | 更新占用任务的结束时间 | |
| 13 | else | |
| 14 | 更新当前任务的start_time=回程空窗期 | |
| 15 | 检查是否有空闲车辆free_vehicle: | |
| 16 | If存在free_vehicle: | |
| 17 | 重新分配任务到free_vehicle,并更新该车辆的使用时间 | |
| 18 | else | |
| 19 | 任务必须等待,更新start_time=回程空窗期 | |
| 20 | 重新计算任务的end_time=start_time+duration | |
| 21 | 更新vehicle_usage[vehicle]=end_time | |
| 22 | Back调整后的任务时间安排 |
| 算法: | 车辆调度冲突处理与优先级校验修正 | |
|---|---|---|
| 输入: | 任务列表tasks (包含优先级信息),车辆使用情况vehicle_usage,转运时间transport_times,车辆列表vehicles | |
| 输出: | 校正后的方案安排 | |
| 1 | 初始化车辆使用表vehicle_usage | |
| 2 | 对任务列表tasks按优先级从高到低排序 | |
| 3 | For task in tasks: | |
| 4 | 取出任务的转运车vehicle,开始时间start_time,优先级priority | |
| 5 | If vehicle在使用中: | |
| 6 | 获取上一次的结束时间last_end_time | |
| 7 | 计算回程空窗期=last_end_time + transport_times[vehicle] | |
| 8 | If start_time <回程空窗期: | |
| 9 | 检查当前任务与占用任务的优先级 | |
| 10 | If当前任务优先级较高: | |
| 11 | 将占用任务的start_time推迟到回程空窗期 | |
| 12 | 更新占用任务的结束时间 | |
| 13 | else | |
| 14 | 更新当前任务的start_time=回程空窗期 | |
| 15 | 检查是否有空闲车辆free_vehicle: | |
| 16 | If存在free_vehicle: | |
| 17 | 重新分配任务到free_vehicle,并更新该车辆的使用时间 | |
| 18 | else | |
| 19 | 任务必须等待,更新start_time=回程空窗期 | |
| 20 | 重新计算任务的end_time=start_time+duration | |
| 21 | 更新vehicle_usage[vehicle]=end_time | |
| 22 | Back调整后的任务时间安排 |
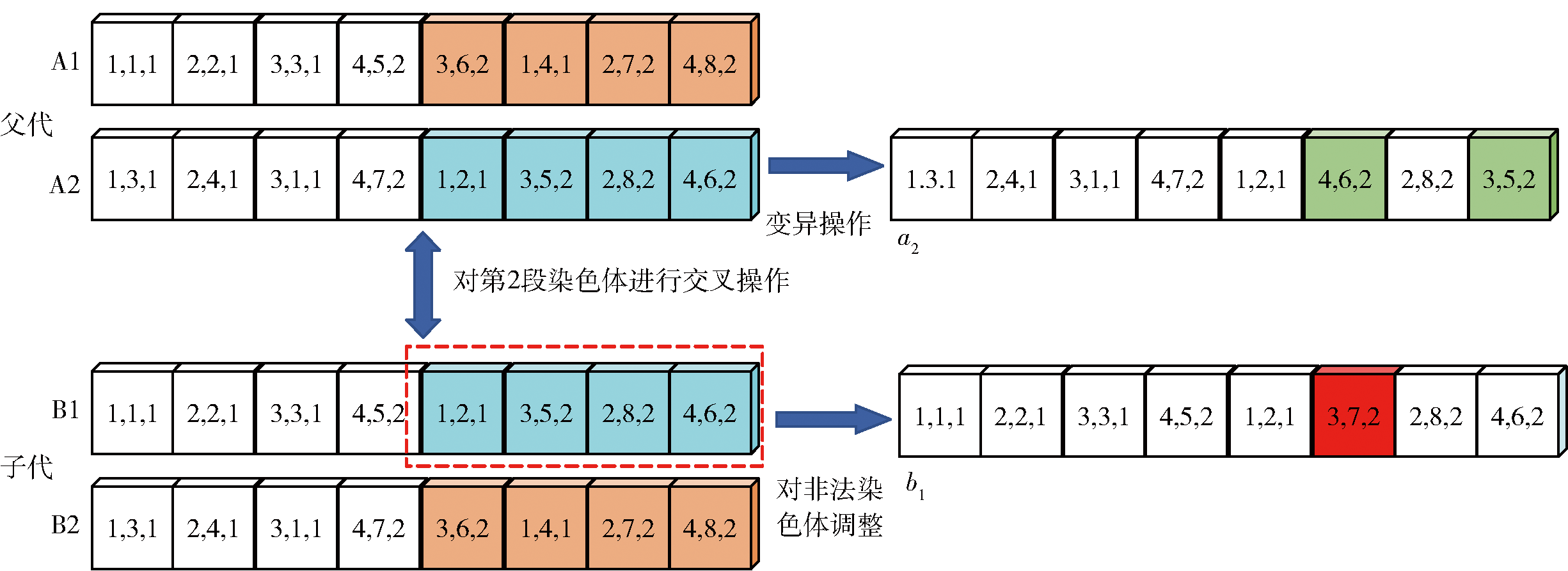
Fig.6 Schematic diagram of crossover and variant operation
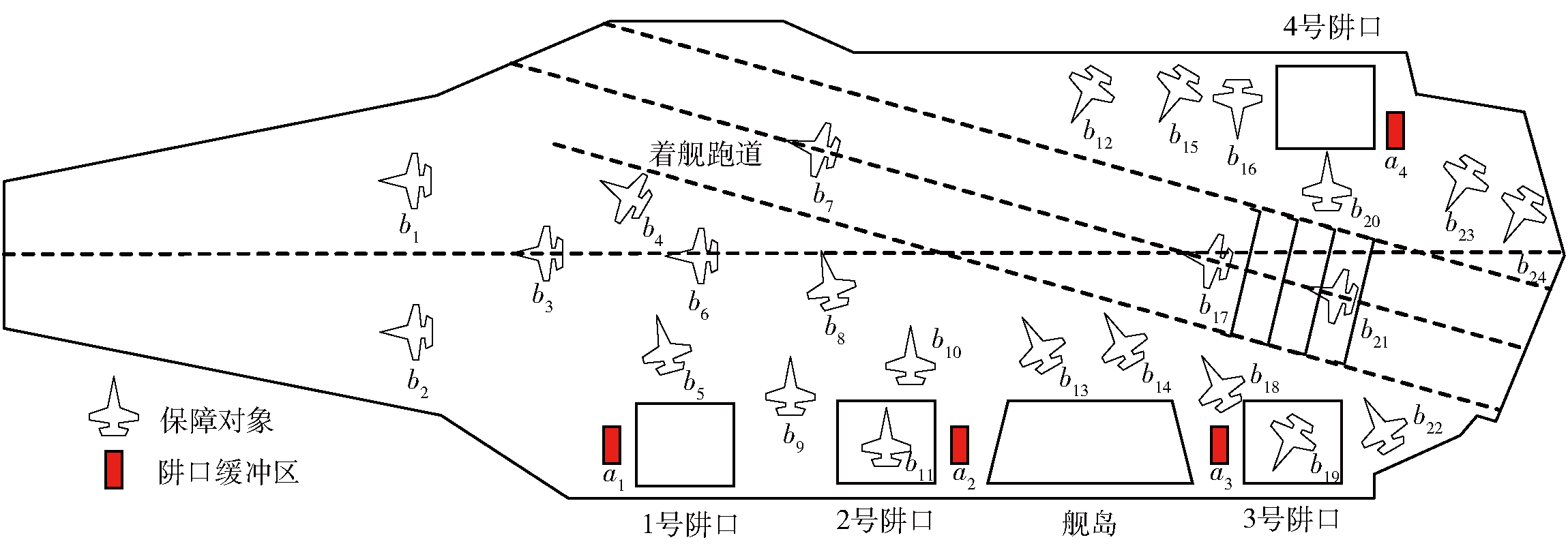
Fig.7 Scene diagram of ammunition support mission on aircraft carrier deck
| 弹药转运车 类型cg | 弹药运输 类型dk | 弹药运输 类型数量cgk | 运输速度cg,v/ (m·min-1) |
|---|---|---|---|
| Ⅰ | AAM/AGM/ASM | 2/2/1 | 20 |
| Ⅱ | AGM/ASM | 2/1 | 30 |
| Ⅲ | ASM | 1 | 25 |
Table 1 Information table of ammunition transfer vehicle
| 弹药转运车 类型cg | 弹药运输 类型dk | 弹药运输 类型数量cgk | 运输速度cg,v/ (m·min-1) |
|---|---|---|---|
| Ⅰ | AAM/AGM/ASM | 2/2/1 | 20 |
| Ⅱ | AGM/ASM | 2/1 | 30 |
| Ⅲ | ASM | 1 | 25 |
| 阱口 缓冲区 | 中心 坐标/cm | 转运车数量/辆 | 车辆 编号cs | ||
|---|---|---|---|---|---|
| 类型Ⅰ | 类型Ⅱ | 类型Ⅲ | |||
| a1 | (37.5,25) | 2 | 4 | 4 | 1~10 |
| a2 | (58.5,25) | 1 | 5 | 4 | 11~20 |
| a3 | (77.5,25) | 3 | 3 | 4 | 21~30 |
| a4 | (87.5,8) | 2 | 2 | 6 | 31~40 |
Table 2 Mission information table of elevator hatch buffer areas
| 阱口 缓冲区 | 中心 坐标/cm | 转运车数量/辆 | 车辆 编号cs | ||
|---|---|---|---|---|---|
| 类型Ⅰ | 类型Ⅱ | 类型Ⅲ | |||
| a1 | (37.5,25) | 2 | 4 | 4 | 1~10 |
| a2 | (58.5,25) | 1 | 5 | 4 | 11~20 |
| a3 | (77.5,25) | 3 | 3 | 4 | 21~30 |
| a4 | (87.5,8) | 2 | 2 | 6 | 31~40 |
| 舰载机 保障站位 | 中心 坐标/cm | 弹药需求 (AAM,AGM,ASM) |
|---|---|---|
| b1 | (24.5,11.5) | (0,2,2) |
| b2 | (24.5,19.5) | (2,0,2) |
| b3 | (32.5,14.5) | (0,2,2) |
| b4 | (38.5,11.5) | (2,0,2) |
| b5 | (40.5,19.5) | (0,2,2) |
| b6 | (42.5,14.5) | (0,2,2) |
| b7 | (44.5,9.5) | (2,0,2) |
| b8 | (50.5,16.5) | (2,2,0) |
| b9 | (48.5,22.5) | (2,2,0) |
| b10 | (55.5,20.5) | (2,0,2) |
| b11 | (54,25) | (2,2,0) |
| b12 | (66.5,6.5) | (0,2,2) |
| b13 | (63.5,19.5) | (2,0,2) |
| b14 | (69.5,20.5) | (2,2,0) |
| b15 | (72.5,6.5) | (0,2,2) |
| b16 | (76.5,6.5) | (2,2,0) |
| b17 | (72.5,15.5) | (0,2,2) |
| b18 | (74.5,21.5) | (2,0,2) |
| b19 | (81,25) | (0,2,2) |
| b20 | (83.5,11.5) | (2,0,2) |
| b21 | (83.5,17.5) | (2,0,2) |
| b22 | (86.5,24.5) | (0,2,2) |
| b23 | (91.5,10.5) | (0,2,2) |
| b24 | (95.5,12.5) | (2,2,0) |
Table 3 Mission information table of carrier-borne aircraft
| 舰载机 保障站位 | 中心 坐标/cm | 弹药需求 (AAM,AGM,ASM) |
|---|---|---|
| b1 | (24.5,11.5) | (0,2,2) |
| b2 | (24.5,19.5) | (2,0,2) |
| b3 | (32.5,14.5) | (0,2,2) |
| b4 | (38.5,11.5) | (2,0,2) |
| b5 | (40.5,19.5) | (0,2,2) |
| b6 | (42.5,14.5) | (0,2,2) |
| b7 | (44.5,9.5) | (2,0,2) |
| b8 | (50.5,16.5) | (2,2,0) |
| b9 | (48.5,22.5) | (2,2,0) |
| b10 | (55.5,20.5) | (2,0,2) |
| b11 | (54,25) | (2,2,0) |
| b12 | (66.5,6.5) | (0,2,2) |
| b13 | (63.5,19.5) | (2,0,2) |
| b14 | (69.5,20.5) | (2,2,0) |
| b15 | (72.5,6.5) | (0,2,2) |
| b16 | (76.5,6.5) | (2,2,0) |
| b17 | (72.5,15.5) | (0,2,2) |
| b18 | (74.5,21.5) | (2,0,2) |
| b19 | (81,25) | (0,2,2) |
| b20 | (83.5,11.5) | (2,0,2) |
| b21 | (83.5,17.5) | (2,0,2) |
| b22 | (86.5,24.5) | (0,2,2) |
| b23 | (91.5,10.5) | (0,2,2) |
| b24 | (95.5,12.5) | (2,2,0) |

Fig.8 Support path of elevator hatch buffer area
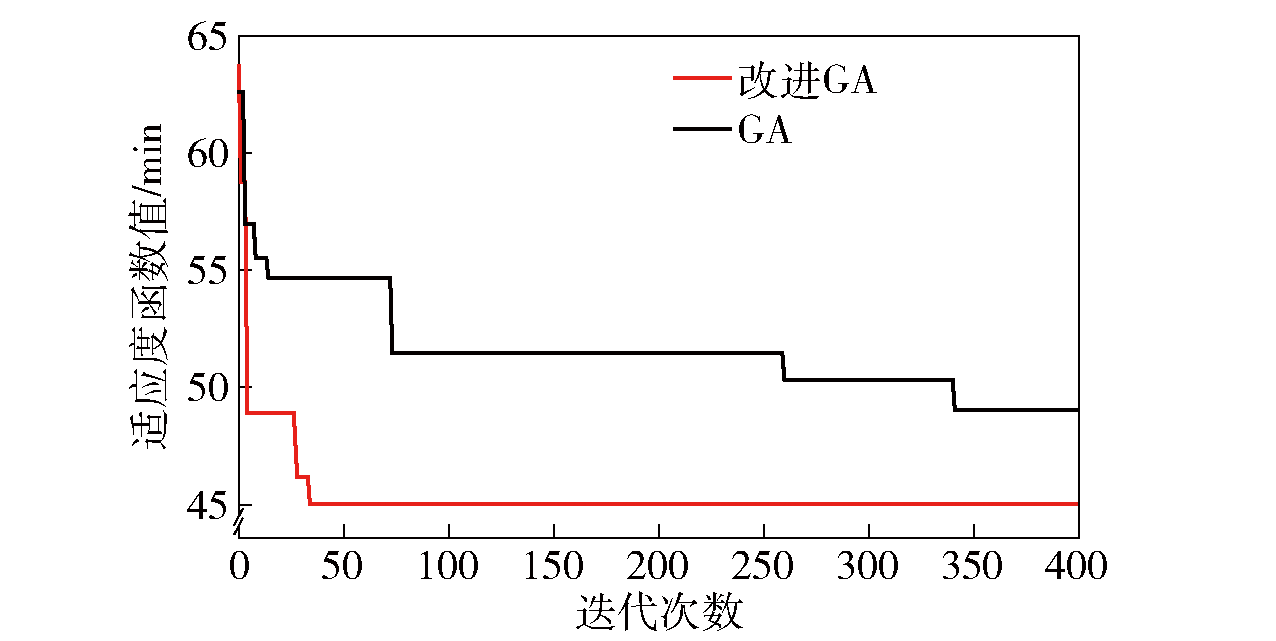
Fig.9 Comparison chart of algorithm iteration process
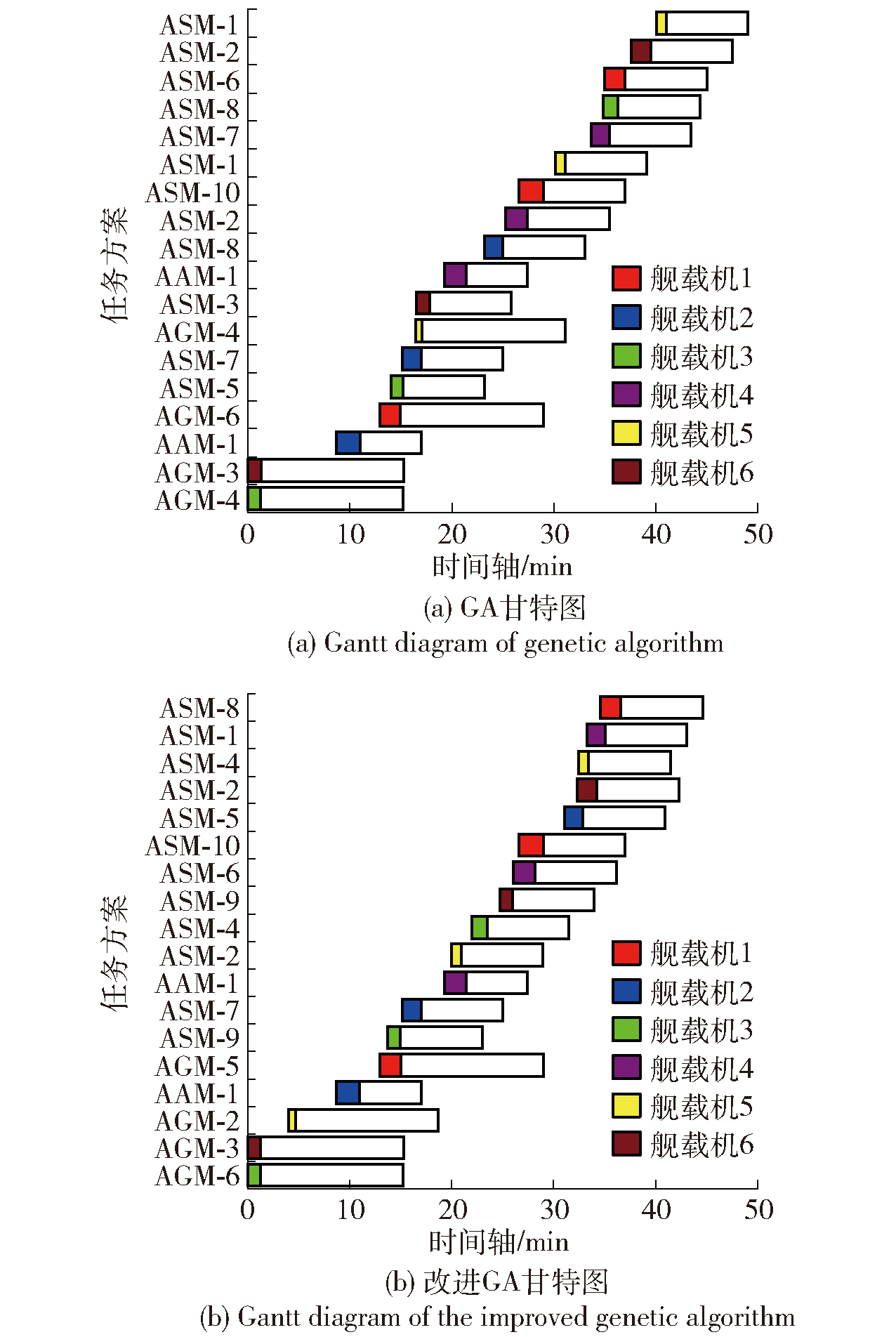
Fig.10 Gantt diagram of carrier-borne aircraft ammunition transfer and scheduling scheme
| 结果 | 改进GA | 传统GA |
|---|---|---|
| 车辆平均利用率/% | 43.01 | 39.46 |
| 舰载机等待总耗时/min | 24.62 | 31.25 |
| 最优解耗时/min | 45.00 | 49.03 |
| 最优解收敛代数 | 34 | 341 |
| 算法平均执行时间/s | 1.24 | 1.67 |
Table 4 Comparison of the example results
| 结果 | 改进GA | 传统GA |
|---|---|---|
| 车辆平均利用率/% | 43.01 | 39.46 |
| 舰载机等待总耗时/min | 24.62 | 31.25 |
| 最优解耗时/min | 45.00 | 49.03 |
| 最优解收敛代数 | 34 | 341 |
| 算法平均执行时间/s | 1.24 | 1.67 |
| 分配策略 | 考虑优先级 | 最优解/min |
|---|---|---|
| 路径均衡 | 是 | 45.00 |
| 否 | 34.10 | |
| 路径最近 | 是 | 49.27 |
| 否 | 36.64 | |
| 对象轮询 | 是 | 50.15 |
| 否 | 37.26 |
Table 5 Optimal solutions of different strategies (priority)
| 分配策略 | 考虑优先级 | 最优解/min |
|---|---|---|
| 路径均衡 | 是 | 45.00 |
| 否 | 34.10 | |
| 路径最近 | 是 | 49.27 |
| 否 | 36.64 | |
| 对象轮询 | 是 | 50.15 |
| 否 | 37.26 |
| 3种分配策略 | 8架舰载机 最优解/min | 16架舰载机 最优解/min | 24架舰载机 最优解/min |
|---|---|---|---|
| 路径均衡 | 33.07 | 36.77 | 45.00 |
| 路径最近 | 34.82 | 38.80 | 48.27 |
| 对象轮询 | 35.13 | 40.25 | 50.15 |
Table 6 Optimal solutions of different strategies (guaranteed quantity)
| 3种分配策略 | 8架舰载机 最优解/min | 16架舰载机 最优解/min | 24架舰载机 最优解/min |
|---|---|---|---|
| 路径均衡 | 33.07 | 36.77 | 45.00 |
| 路径最近 | 34.82 | 38.80 | 48.27 |
| 对象轮询 | 35.13 | 40.25 | 50.15 |
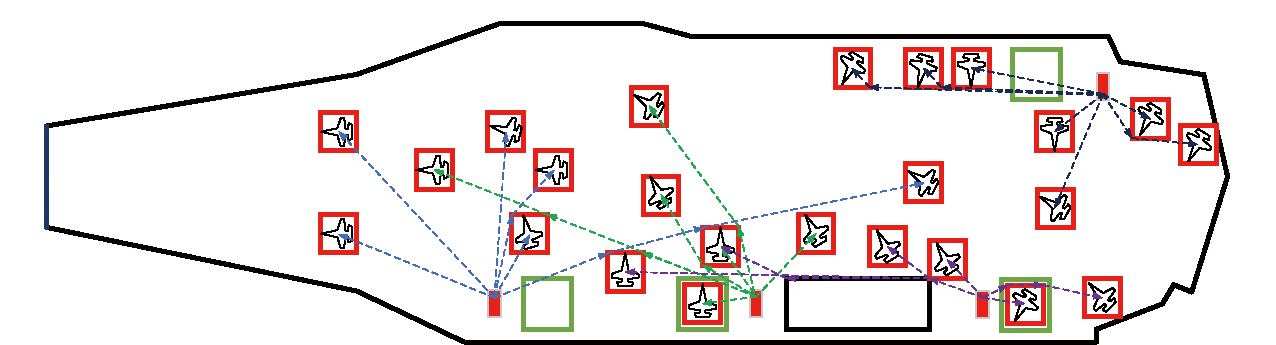
Fig.11 The elevator hatch distribution scheme of 24 carrier-borne aircrafts
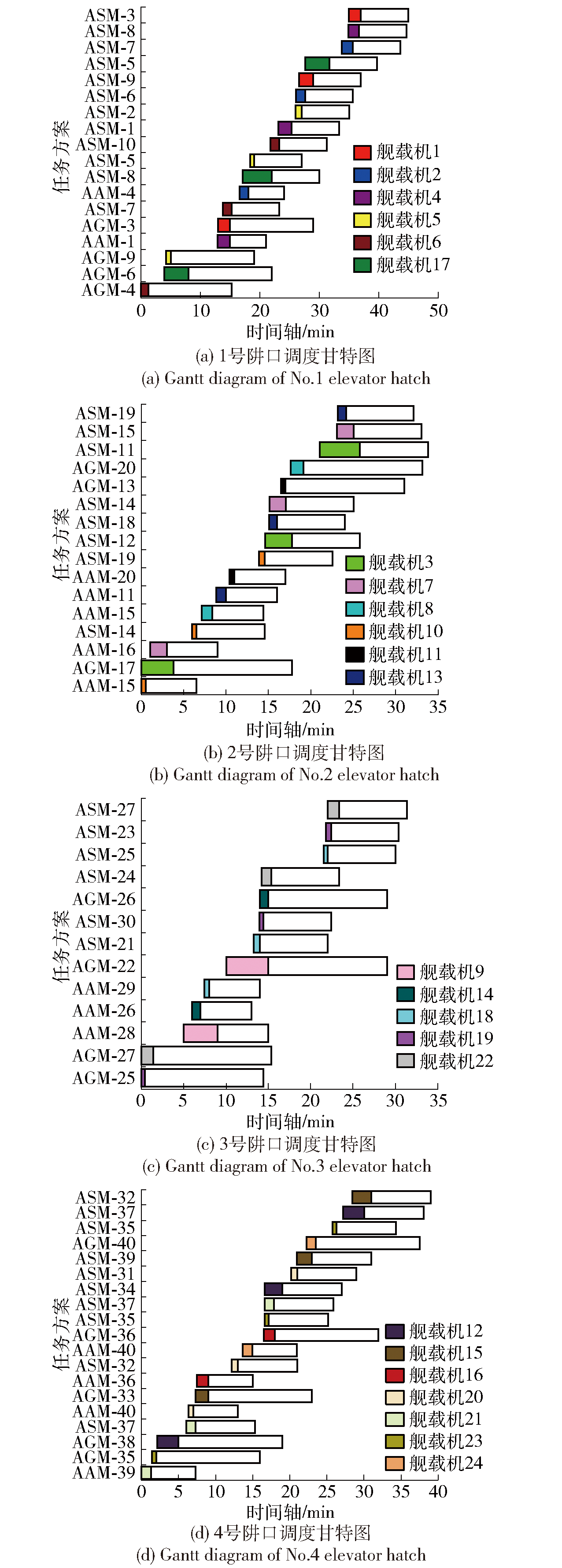
Fig.12 Gantt diagram of elevator hatch scheduling scheme
| [1] |
李亚飞, 吴庆顺, 徐明亮, 等. 基于强化学习的舰载机保障作业实时调度方法[J]. 中国科学:信息科学, 2021, 51(2):247-262.
|
|
|
|
| [2] |
张少辉, 刘舜, 李亚飞, 等. 航空母舰舰载机弹药保障作业调度优化算法[J]. 航空学报, 2023, 44(20): 228485.
doi: 10.7527/S1000-6893.2023.28485 |
|
doi: 10.7527/S1000-6893.2023.28485 |
|
| [3] |
苏析超, 伍恒, 崔荣伟, 等. 基于边际-人工蜂群算法的舰载机机群出动保障人员配置-调度联合优化方法[J]. 北京航空航天大学学报, 2020, 46(11): 2056-2068.
|
|
|
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
刘东, 吴家仁, 周一舟, 等. 舰载机综合保障技术实践及发展展望[J]. 航空学报, 2021, 42(8): 525802.
doi: 10.7527/S1000-6893.2021.25802 |
|
doi: 10.7527/S1000-6893.2021.25802 |
|
| [8] |
吴勇, 潘星, 康锐, 等. 基于图示评审技术的舰载机航空保障时间分析[J]. 兵工学报, 2013, 34(12): 1611-1615.
doi: 10.3969/j.issn.1000-1093.2013.12.018 |
|
doi: 10.3969/j.issn.1000-1093.2013.12.018 |
|
| [9] |
金钊, 金璐, 张博闻, 等. 舰载机弹药保障作业调度的形式化建模与验证[J]. 软件学报, 2024, 35(9): 1-23.
|
|
|
|
| [10] |
|
| [11] |
陶俊权, 苏析超, 韩维, 等. 基于EDA算法的航母弹药调度优化研究[J]. 兵器装备工程学报, 2022, 43(5): 125-131.
|
|
|
|
| [12] |
范加利, 黄葵, 朱兴动, 等. 基于禁忌算法的舰载机甲板作业动态调度优化算法[J]. 系统工程与电子技术, 2023, 45(10):3172-3182.
doi: 10.12305/j.issn.1001-506X.2023.10.22 |
|
doi: 10.12305/j.issn.1001-506X.2023.10.22 |
|
| [13] |
刘子玄, 万兵, 苏析超, 等. 基于HA算法的舰载机出动作业调度方法[J]. 系统工程与电子技术, 2024, 46(5): 1691-1702.
doi: 10.12305/j.issn.1001-506X.2024.05.22 |
|
doi: 10.12305/j.issn.1001-506X.2024.05.22 |
|
| [14] |
罗湘勇, 冯浩源, 潘星, 等. 面向流程的保障体系集成建模方法研究[J]. 系统工程与电子技术, 2013, 35(11):2314-2319.
|
|
|
|
| [15] |
韩维, 苏析超, 陈俊锋. 舰载机多机一体化机务保障调度方法[J]. 系统工程与电子技术, 2015, 37(4): 809-816.
|
|
|
|
| [16] |
|
| [17] |
|
| [18] |
陈宝童, 王丽清, 蒋晓敏, 等. 群智协同任务分配研究综述[J]. 计算机工程与应用, 2021, 57(20):1-12.
doi: 10.3778/j.issn.1002-8331.2105-0396 |
|
doi: 10.3778/j.issn.1002-8331.2105-0396 |
|
| [19] |
李彦征, 陈浩, 赵文政, 等. 多工位多机器人装配过程的分布式点焊任务分配方法[J]. 计算机集成制造系统, 2023, 29(3):781-788.
|
|
|
|
| [20] |
|
| [21] |
杜伟伟, 陈小伟. 陆军战术级作战任务分配及优化方法[J]. 兵工学报, 2023, 44(5):1431-1442.
|
|
doi: 10.12382/bgxb.2022.0007 |
|
| [22] |
裘镓荣, 曾鹏飞, 邵伟平, 等. 基于PSO-LSSVM弹药装配质量预测方法[J]. 兵工学报, 2022, 43(9):2379-2387.
|
|
doi: 10.12382/bgxb.2021.0867 |
|
| [23] |
吕晓峰, 杨东泽, 马羚, 等. 基于改进遗传算法的舰载机弹药挂载调度[J]. 电光与控制, 2024, 31(1): 82-86.
|
|
|
|
| [24] |
张韬, 项祺, 郑婉文, 等. 基于改进A*算法的路径规划在海战兵棋推演中的应用[J]. 兵工学报, 2022, 43(4): 960-968.
doi: 10.12382/bgxb.2021.0209 |
|
|
|
| [25] |
赵鹏程, 宋保维, 毛昭勇, 等. 基于改进的复合自适应遗传算法的UUV水下回收路径规划[J]. 兵工学报, 2022, 43(10):2598-2608.
|
|
doi: 10.12382/bgxb.2021.0474 |
|
| [26] |
|
| [1] | YE Wenbo, FANG Yangwang, HONG Ruiyang, HU Qidong. Elliptical Obstacle Avoidance Guidance for Underactuated Unmanned Underwater Vehicle Based on Control Barrier Function [J]. Acta Armamentarii, 2025, 46(5): 240404-. |
| [2] | HE Yang, LI Gang. Research on Trajectory Planning Control Method of Intelligent Vehicle Based on Velocity Obstacle Model [J]. Acta Armamentarii, 2025, 46(4): 240058-. |
| [3] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [4] | LIU Jinrong, LI Wei. Non-magnetic Heating and High-precision Temperature Control of the Alkali-metal Vapor Cell in SERF Atomic Spin Gyroscope [J]. Acta Armamentarii, 2024, 45(9): 3288-3296. |
| [5] | SHEN Cheng, ZHANG Lianchao, ZHANG Zhuo, ZHU Wenliang, CHEN Yukang. Fire Control Correction and Line-of-sight Filtering Prediction of Lightweight Ballistic Calculation System [J]. Acta Armamentarii, 2024, 45(2): 429-442. |
| [6] | DING Wengjun, ZHANG Guozong, LIU Haimin, CHAI Yajun, WANG Chiyu, MAO Zhaoyong. Tracking Control of Underactuated Autonomous Underwater Vehicle Formation under Current Disturbance and Communication Delay [J]. Acta Armamentarii, 2024, 45(1): 184-196. |
| [7] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| [8] | HUANG Xin, CHANG Chenxu, LI Xiaohang, SU Qingyu. An Approach for Reconstructing False Data Injection Attack Signal Based on Cooperative Interaction Observer [J]. Acta Armamentarii, 2023, 44(11): 3359-3368. |
| [9] | ZHANG Cong, LIU Shuang, JIANG Siyuan, LIU Shiji. Driving Leveling Control Method with Multi-Actuator Cooperation for Special Vehicles [J]. Acta Armamentarii, 2023, 44(1): 98-107. |
| [10] | QIAN Linfang, SUN Le, CHEN Guangsong, TONG Minghao, ZOU Quan. Investigation of the Sensorless Motor Control Technology for Gun Autoloading [J]. Acta Armamentarii, 2022, 43(10): 2417-2428. |
| [11] | XIU Yang, DENG Hongbin, WEI Yiran, LI Dongfang. Adaptive Robust Path Following Controller for Quadrotor UAVs Based on Parameter Estimation [J]. Acta Armamentarii, 2022, 43(8): 1926-1938. |
| [12] | JI Guang, HAO Jianguo, ZHANG Zhenwei. Design Scheme of Virtual Twin System for UAV Combat [J]. Acta Armamentarii, 2022, 43(8): 1902-1912. |
| [13] | GUO Bo, KE Fang, YU Xiao, GAO Xinyang, SUN Aixian. Control Strategy for Photoelectric Stabilized Platform Based on Sliding Mode Variable Structure Control [J]. Acta Armamentarii, 2022, 43(8): 1874-1880. |
| [14] | MIAO Shuangquan, ZHANG Baoquan, WANG Mingchao, WANG Xinwei, SHEN Yu. Adaptive Exponential Time-varying Sliding Mode Control based on Disturbance Observer for Photoelectric Stabilized AirbornePlatform [J]. Acta Armamentarii, 2022, 43(7): 1636-1645. |
| [15] | GUO Wei, WU Kai, ZHOU Yue, SUN Hongming, XU Gaofei, GAO Sen. Path Planning of Deep-sea Landing Vehicle Based on Ant Colony Algorithm [J]. Acta Armamentarii, 2022, 43(6): 1387-1394. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||