
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (5): 240404-.doi: 10.12382/bgxb.2024.0404
Previous Articles Next Articles
YE Wenbo1,2,3, FANG Yangwang1,2,3,*( ), HONG Ruiyang1,2,3, HU Qidong4
), HONG Ruiyang1,2,3, HU Qidong4
Received:2024-05-23
Online:2025-05-07
Contact:
FANG Yangwang
CLC Number:
YE Wenbo, FANG Yangwang, HONG Ruiyang, HU Qidong. Elliptical Obstacle Avoidance Guidance for Underactuated Unmanned Underwater Vehicle Based on Control Barrier Function[J]. Acta Armamentarii, 2025, 46(5): 240404-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Elliptical modeling of obstacles
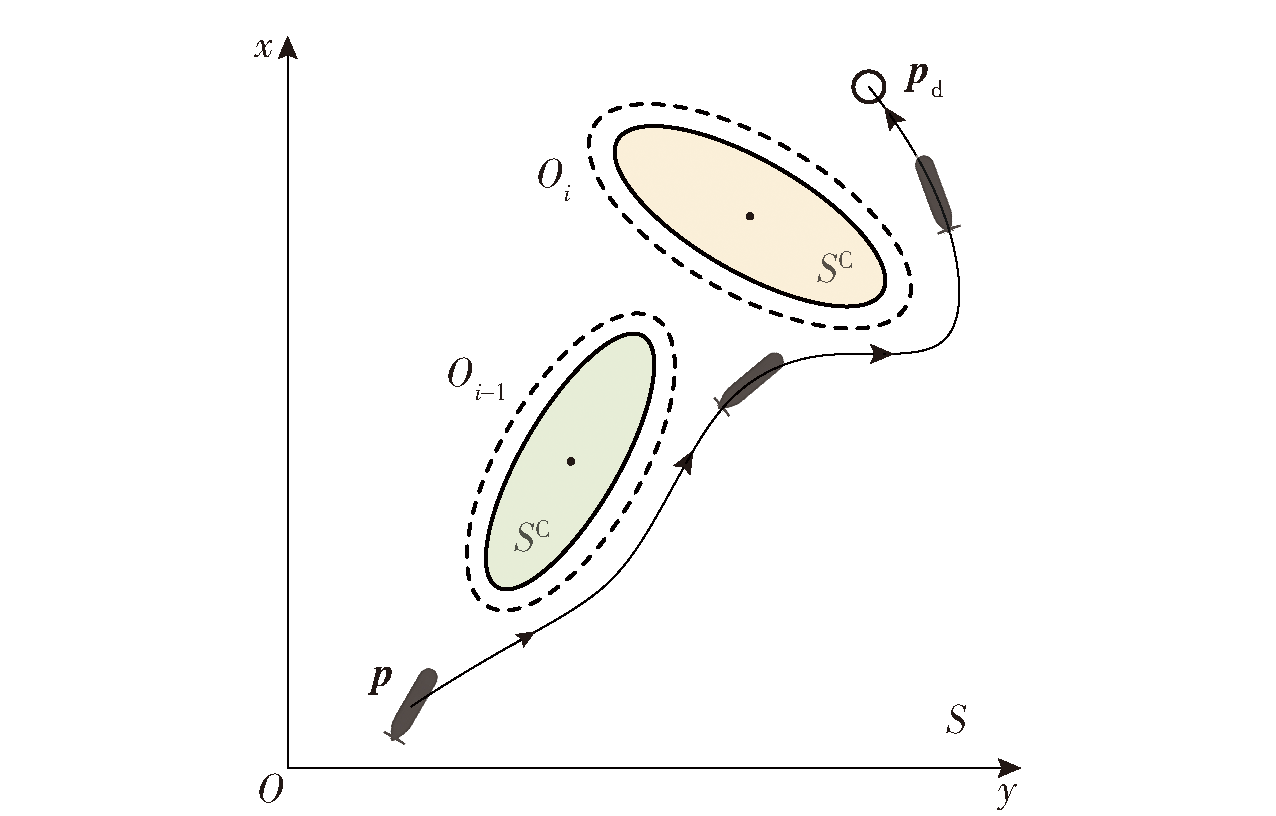
Fig.2 Guidance objective
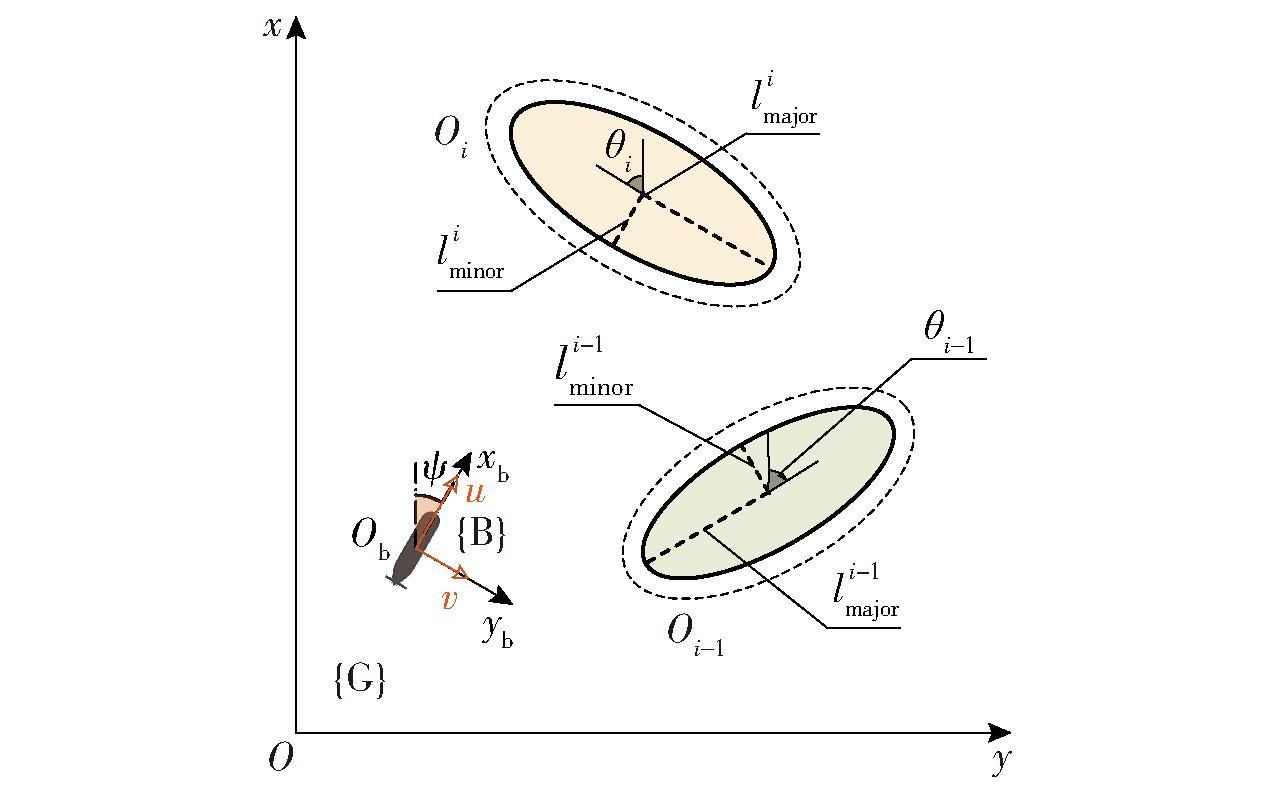
Fig.3 Coordinate system and elliptical modeling of obstacles
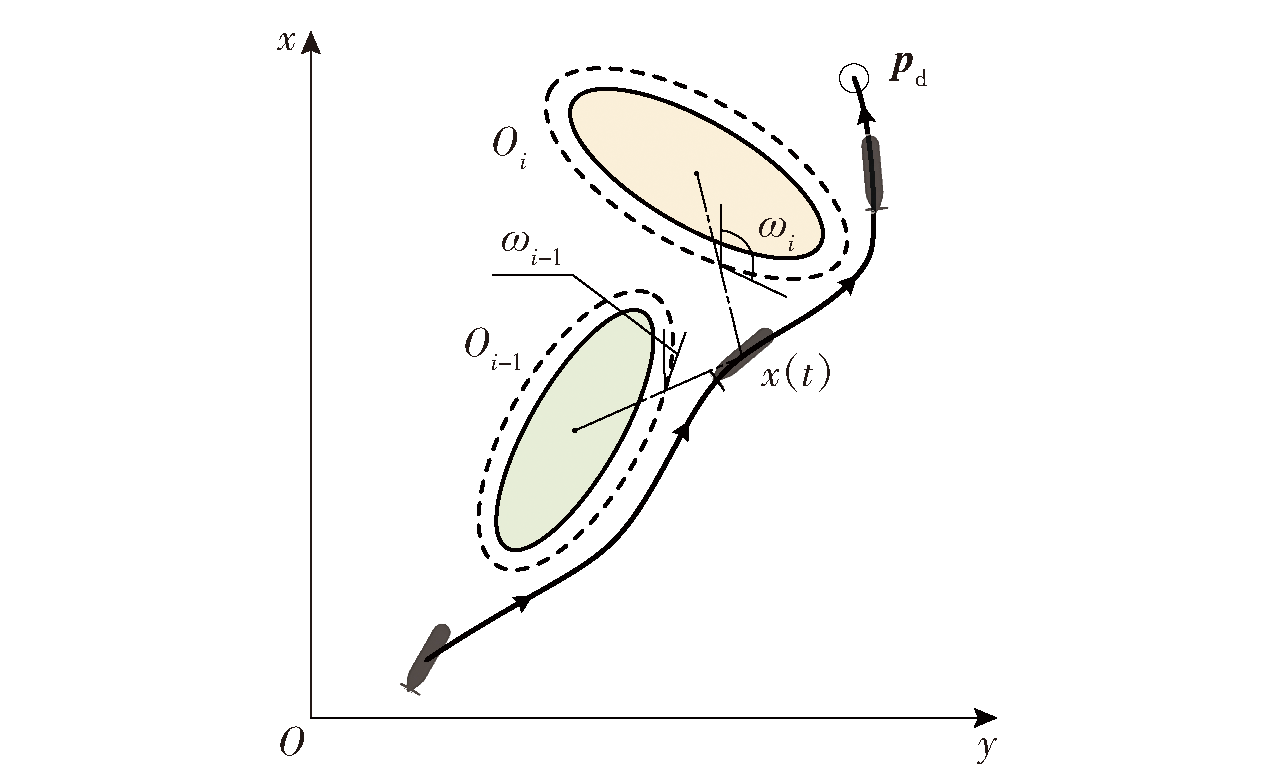
Fig.4 Tangent angle at time t

Fig.5 Comparison of obstacle avoidance trajectories

Fig.6 Comparison of guidance inputs with different parameters
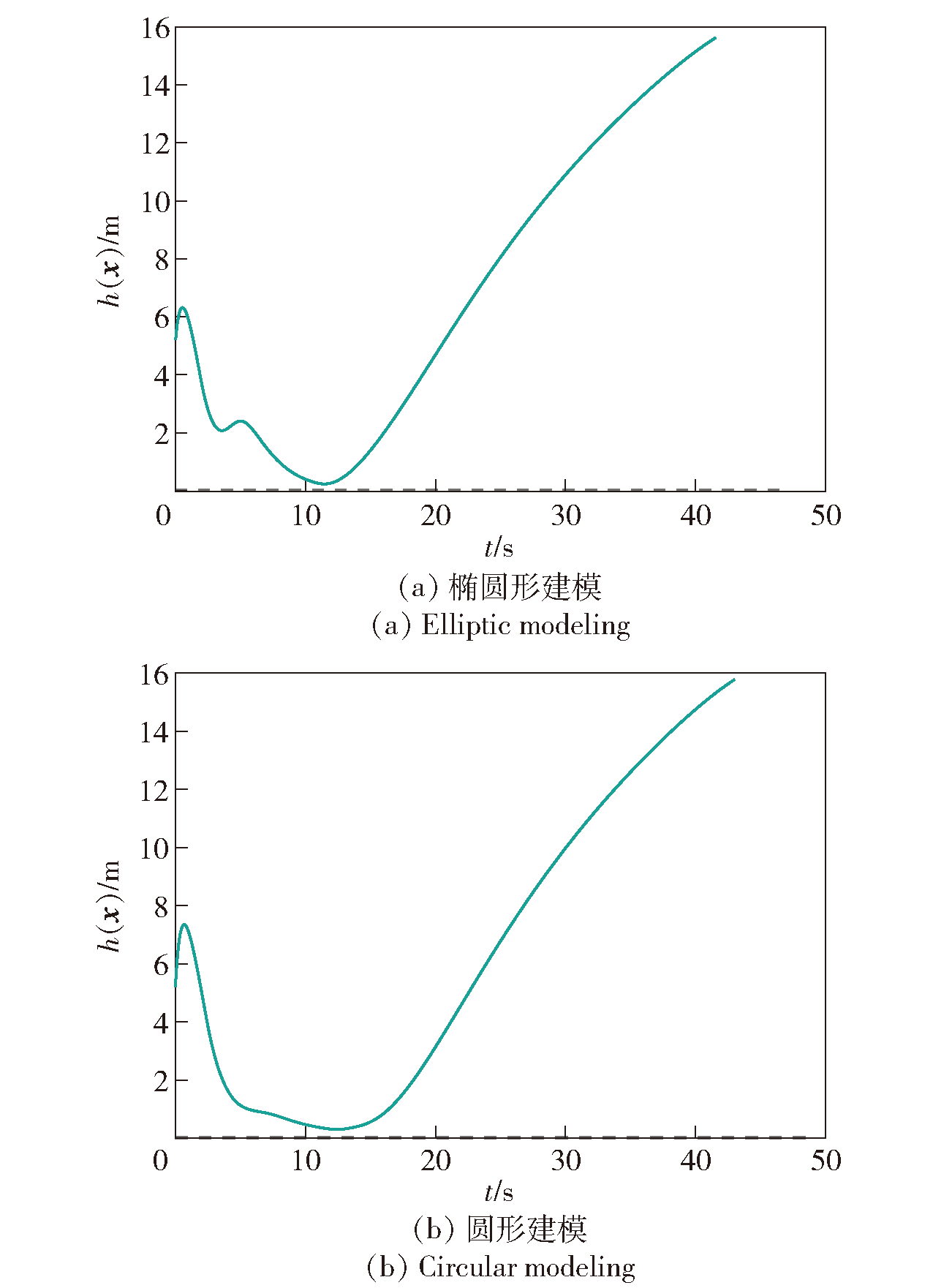
Fig.7 Comparison of obstacle avoidance constraints h(x)

Fig.8 Comparison of obstacle avoidance trajectories
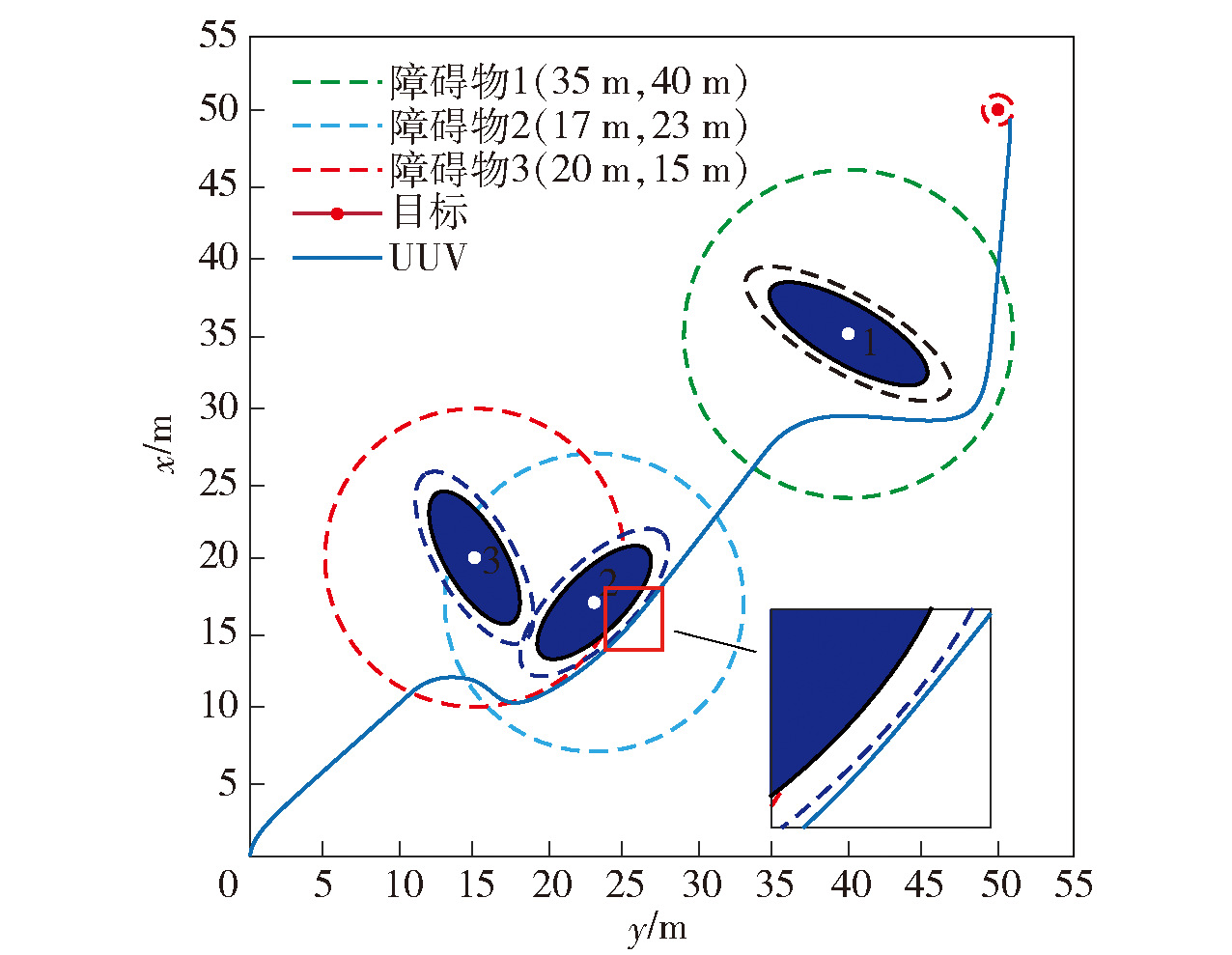
Fig.9 Obstacle avoidance trajectory for multiple obstacles

Fig.10 Guidance input for multiple obstacles

Fig.11 Obstacle avoidance constraints for multiple obstacles

Fig.12 Obstacle avoidance trajectories with different parameters

Fig.13 Guidance inputs with different parameters

Fig.14 Obstacle avoidance constraints with different parameters
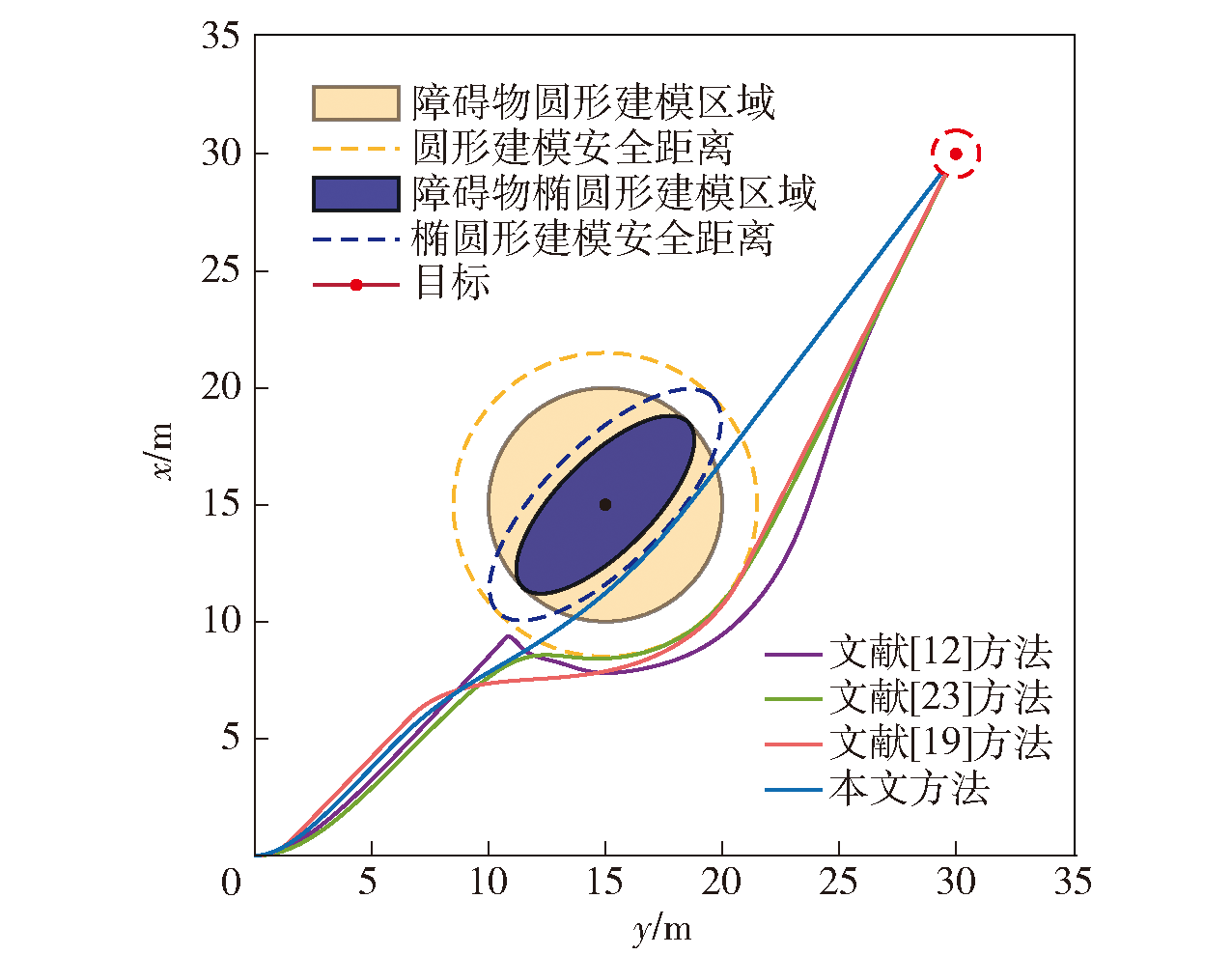
Fig.15 Comparison of trajectories for different obstacle avoidance methods

Fig.16 Comparison of guidance inputs u for different obstacle avoidance methods

Fig.17 Comparison of guidance inputs r for different obstacle avoidance methods
| [1] |
doi: 10.1016/j.oceaneng.2019.04.011 |
| [2] |
邱志明, 孟祥尧, 马焱, 等. 海上无人系统发展及关键技术研究[J]. 中国工程科学, 2023, 25(3): 74-83.
doi: 10.15302/J-SSCAE-2023.03.005 |
|
doi: 10.15302/J-SSCAE-2023.03.005 |
|
| [3] |
徐同乐, 刘方, 肖玉杰, 等. 国外无人反水雷装备及技术发展[J]. 兵工学报, 2022, 43(增刊2): 64-70.
|
|
doi: 10.12382/bgxb.2022.B019 |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
郭银景, 刘琦, 鲍建康, 等. 基于人工势场法的AUV避障算法研究综述[J]. 计算机工程与应用, 2020, 56(4): 16-23.
doi: 10.3778/j.issn.1002-8331.1910-0464 |
|
doi: 10.3778/j.issn.1002-8331.1910-0464 |
|
| [11] |
潘无为, 姜大鹏, 庞永杰, 等. 人工势场和虚拟结构相结合的多水下机器人编队控制[J]. 兵工学报, 2017, 38(2): 326-334.
doi: 10.3969/j.issn.1000-1093.2017.02.017 |
|
|
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
徐彦平. 基于控制障碍函数的无人艇集群制导及实验验证[D]. 大连: 大连海事大学, 2023.
|
|
|
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
高剑. 无人水下航行器自适应非线性控制技术[M]. 西安: 西北工业大学出版社, 2016.
|
|
|
|
| [32] |
|
| [33] |
杜宏宝, 王正杰, 唐礼喜, 等. 基于控制障碍函数的飞行器避障与制导控制[J]. 兵工学报, 2023, 44(9): 2814-2823.
doi: 10.12382/bgxb.2022.1002 |
|
doi: 10.12382/bgxb.2022.1002 |
| [1] | WU Junqi, WU Bi, DENG Hongbin, ZHOU Zhiqian. Time-varying UAV Formation Optimal Tracking Control with Dynamic Parameter Extended Control Barrier Functions [J]. Acta Armamentarii, 2025, 46(4): 240260-. |
| [2] | XIAN Sujie, WANG Kang, ZENG Xin, SONG Jie, WU Zhilin. An Impact Angle and Field of View Constraints Guidance Law Based on Deep Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(4): 240435-. |
| [3] | PAN Yunwei, LI Min, ZENG Xiangguang, HUANG Ao, ZHANG Jiaheng, REN Wenzhe, PENG Bei. AUV Obstacle Avoidance and Path Planning Based on Artificial Potential Field and Improved Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(4): 240300-. |
| [4] | LI Yaxuan, LIU Xinfu. Real-time Trajectory Planning for Fixed-wing UAVs Based on Exact Convex Relaxation [J]. Acta Armamentarii, 2025, 46(3): 240362-. |
| [5] | LI Shiying, DING Yinghe, SUN Haiwen, XU Zheng, LI Ye, TANG Enbo. Consensus Model and Collaborative Control Method of Large-scale Unmanned Cluster [J]. Acta Armamentarii, 2024, 45(S2): 113-122. |
| [6] | HU Yanyang, HE Fan, BAI Chengchao. Cooperative Obstacle Avoidance Decision Method for the Terminal Guidance Phase of Hypersonic Vehicles [J]. Acta Armamentarii, 2024, 45(9): 3147-3160. |
| [7] | CHEN Wenjie, CUI Xiaohong, WANG Binrui. Safety Optimal Tracking Control Algorithm and Robot Arm Simulation [J]. Acta Armamentarii, 2024, 45(8): 2688-2697. |
| [8] | WU Hao, LI Dongguang, WANG Yong’an. Time-to-go Estimation Method for Anti-ship Missiles with Large Lead Angle in Three-dimensional Space [J]. Acta Armamentarii, 2024, 45(5): 1449-1459. |
| [9] | REN Hongbin, SUN Jiyu, Chih-Keng CHEN, ZHAO Yuzhuang, YANG Lin. LTV-MPC-based Real-time and Anti-noise Motion Control for High-speed Vehicle [J]. Acta Armamentarii, 2024, 45(12): 4311-4322. |
| [10] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [11] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [12] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| [13] | ZHAO Junmin, HE Haozhe, WANG Shaoqi, NIE Cong, JIAO Yingjie. Joint Trajectory Planning for Multiple UAVs Target Tracking and Obstacle Avoidance in a Complicated Environment [J]. Acta Armamentarii, 2023, 44(9): 2685-2696. |
| [14] | WANG Yuchen, WANG Wei, LIN Shiyao, YANG Jing, WANG Shaolong, YIN Zhao. Three-dimensional Adaptive Sliding Mode Cooperative Guidance Law with Impact Time and Angle Constraints [J]. Acta Armamentarii, 2023, 44(9): 2778-2790. |
| [15] | DU Hongbao, WANG Zhengjie, TANG Lixi, ZHANG Xiaoning. Control Barrier Function-based Control for Aircraft Avoidance and Guidance with Dynamic Obstacles [J]. Acta Armamentarii, 2023, 44(9): 2814-2823. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||