
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (4): 240090-.doi: 10.12382/bgxb.2024.0090
Previous Articles Next Articles
ZHANG Senjie1,2, GONG Jianwei1, QI Jianyong1, ZANG Zheng1,3, HU Xiuzhong1, GONG Xiaojie1, XIONG Guangming1,*( )
)
Received:2024-01-30
Online:2025-04-30
Contact:
XIONG Guangming
ZHANG Senjie, GONG Jianwei, QI Jianyong, ZANG Zheng, HU Xiuzhong, GONG Xiaojie, XIONG Guangming. Lightweight Loop Closure Detection of Off-road Environment Based on Ground Features[J]. Acta Armamentarii, 2025, 46(4): 240090-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Framework of positioning system for unmanned platform
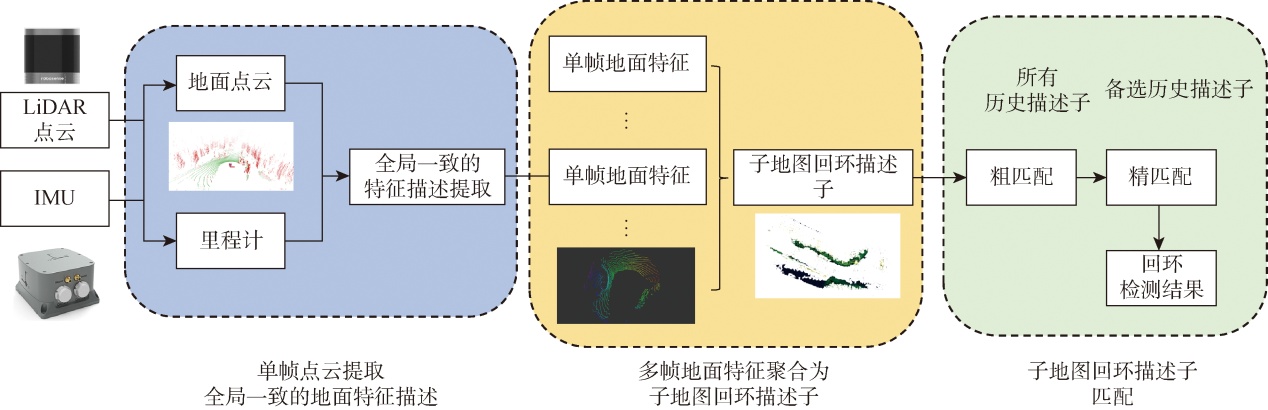
Fig.2 Lightweight loop closure detection system framework based on ground features of LiDAR point clouds

Fig.3 Extraction of ground points from LiDAR points

Fig.4 Extraction of ground points from LiDAR single frame points after the pose correction
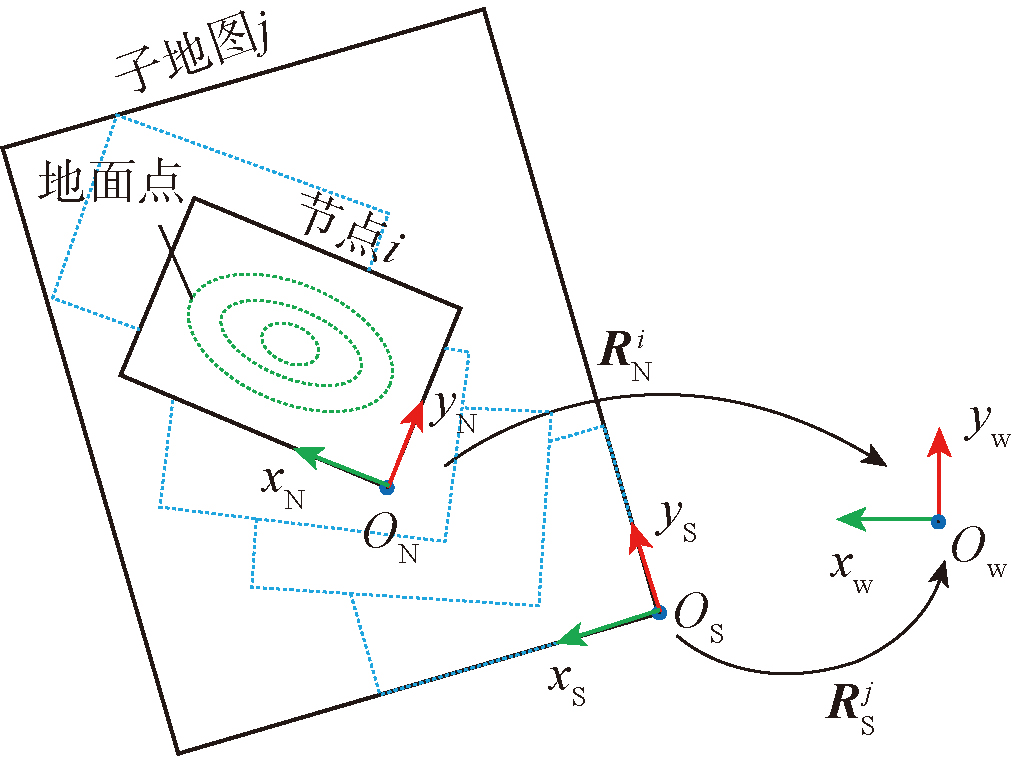
Fig.5 Conversion of single frame LiDAR point clouds to submap

Fig.6 Loop closure detection descriptor made with point clouds in submap
| 通道 | 内容 |
|---|---|
| B | 地面点云回波强度,并从0~255归一化至0~155 |
| G | 3.1中计算的角度中大于5°的部分,并从5°~90°归一化至0~255 |
| R | 3.1中计算的角度中大于15°的部分,并从15°~90°归一化至0~255 |
Table 1 Content of each channel of submap loop closure detection descriptor
| 通道 | 内容 |
|---|---|
| B | 地面点云回波强度,并从0~255归一化至0~155 |
| G | 3.1中计算的角度中大于5°的部分,并从5°~90°归一化至0~255 |
| R | 3.1中计算的角度中大于15°的部分,并从15°~90°归一化至0~255 |

Fig.7 Submap loop closure detection descriptor
| 名称 | 编号 | LiDAR数据来源 | 环境路况描述 |
|---|---|---|---|
| 测试Ⅰ | Ⅰ | Velodye_HDL_64 | 城市环境 |
| 测试Ⅱ | Ⅱ | RS_Helios_32 | 轨迹1 |
| 测试Ⅲ | Ⅲ-1 | RS_Helios_32 | 轨迹4 |
| Ⅲ-2 | RS_Helios_32 | 轨迹4反向 | |
| Ⅲ-3 | RS_LiDAR_M1 | 轨迹4 | |
| Ⅲ-4 | RS_LiDAR_M1 | 轨迹4反向 | |
| 测试Ⅳ | Ⅳ-1 | RS_Helios_32 | 轨迹2 |
| Ⅳ-2 | RS_Helios_32 | 轨迹3 |
Table 2 Simulation experiment and real vehicle test conditions
| 名称 | 编号 | LiDAR数据来源 | 环境路况描述 |
|---|---|---|---|
| 测试Ⅰ | Ⅰ | Velodye_HDL_64 | 城市环境 |
| 测试Ⅱ | Ⅱ | RS_Helios_32 | 轨迹1 |
| 测试Ⅲ | Ⅲ-1 | RS_Helios_32 | 轨迹4 |
| Ⅲ-2 | RS_Helios_32 | 轨迹4反向 | |
| Ⅲ-3 | RS_LiDAR_M1 | 轨迹4 | |
| Ⅲ-4 | RS_LiDAR_M1 | 轨迹4反向 | |
| 测试Ⅳ | Ⅳ-1 | RS_Helios_32 | 轨迹2 |
| Ⅳ-2 | RS_Helios_32 | 轨迹3 |

Fig.8 Real test trajectory 1

Fig.9 Real test trajectories 2,3 and 4
| 回环检测模块 | LiDAR数据来源 | ||
|---|---|---|---|
| Velodye_HDL_64 | RS_Helios_32 | RS_LiDAR_M1 | |
| 提取地面点 | 10.44 | 3.67 | 3.87 |
| 计算法向量 | 13.47 | 5.46 | 7.17 |
| 地面点插补至子地图 | 1.10 | 0.36 | 0.35 |
| 计算子地图描述子(每5s) | 80 | 52.83 | 37.05 |
| 粗匹配 | 2.73 | 2.67 | 2.23 |
| 精匹配 | →0 | →0 | →0 |
| 平均每帧总耗时 | 29.34 | 13.21 | 14.36 |
Table 3 Time consumption statistics of the proposed algorithm ms
| 回环检测模块 | LiDAR数据来源 | ||
|---|---|---|---|
| Velodye_HDL_64 | RS_Helios_32 | RS_LiDAR_M1 | |
| 提取地面点 | 10.44 | 3.67 | 3.87 |
| 计算法向量 | 13.47 | 5.46 | 7.17 |
| 地面点插补至子地图 | 1.10 | 0.36 | 0.35 |
| 计算子地图描述子(每5s) | 80 | 52.83 | 37.05 |
| 粗匹配 | 2.73 | 2.67 | 2.23 |
| 精匹配 | →0 | →0 | →0 |
| 平均每帧总耗时 | 29.34 | 13.21 | 14.36 |
| 算法 | 回环检测 模块 | LiDAR数据来源 | ||
|---|---|---|---|---|
| Velodye_HDL_64 | RS_Helios_32 | RS_LiDAR_M1 | ||
| SC 算法 | 描述子构建 | 2.76 | 0.36 | 0.17 |
| 寻找回环 | 73.16 | 2.45 | 1.89 | |
| IRIS 算法 | 描述子构建 | 7.61 | 9.68 | 6.51 |
| 寻找回环 | 1913.51 | 1957.55 | 1945.35 | |
| M2DP 算法 | 描述子构建 | 1225.96 | 36.09 | 18.88 |
| 寻找回环 | 7.637 | 2.97 | 2.41 | |
Table 4 Time consumption statistics of open source algorithms ms
| 算法 | 回环检测 模块 | LiDAR数据来源 | ||
|---|---|---|---|---|
| Velodye_HDL_64 | RS_Helios_32 | RS_LiDAR_M1 | ||
| SC 算法 | 描述子构建 | 2.76 | 0.36 | 0.17 |
| 寻找回环 | 73.16 | 2.45 | 1.89 | |
| IRIS 算法 | 描述子构建 | 7.61 | 9.68 | 6.51 |
| 寻找回环 | 1913.51 | 1957.55 | 1945.35 | |
| M2DP 算法 | 描述子构建 | 1225.96 | 36.09 | 18.88 |
| 寻找回环 | 7.637 | 2.97 | 2.41 | |

Fig.10 Precision-recall
| [1] |
陈慧岩, 张玉. 军用地面无人机动平台技术发展综述[J]. 兵工学报, 2014, 35(10):1696-1706.
doi: 10.3969/j.issn.1000-1093.2014.10.026 |
|
|
|
| [2] |
郑壮壮, 曹万科, 邹渊, 等. 动态环境下无人地面无人平台点云地图快速重定位方法[J]. 兵工学报, 2020, 41(8):1581-1589.
doi: 10.3969/j.issn.1000-1093.2020.08.013 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.013 |
|
| [3] |
|
| [4] |
张福斌, 张炳烁, 杨玉帅. 基于单目/IMU/里程计融合的SLAM算法[J]. 兵工学报, 2022, 43(11):2810-2817.
|
|
doi: 10.12382/bgxb.2022.0240 |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
蒋旭东. 基于多传感器融合的紧耦合SLAM算法的设计与实现[D]. 长春: 吉林大学, 2023.
|
|
|
|
| [14] |
张凯钧. 基于复杂场景的高精度地图生成算法研究[D]. 长春: 吉林大学, 2023.
|
|
|
|
| [15] |
|
| [16] |
刘忠泽, 陈慧岩, 崔星, 等. 无人平台越野环境下同步定位与地图创建[J]. 兵工学报, 2019, 40(12):2399-2406.
doi: 10.3969/j.issn.1000-1093.2019.12.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.12.002 |
|
| [17] |
高馨雨. 起伏路环境激光SLAM算法设计与实现[D]. 长春: 吉林大学, 2023.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [1] | TIAN Hongqing, MA Mingtao, ZHANG Bo, ZHENG Xunjia. Potential Field Exploring Tree Path Planning for Intelligent Vehicle in Off-road Environment [J]. Acta Armamentarii, 2024, 45(7): 2110-2127. |
| [2] | LI Zhaodong, ZHAO Xijun, YANG Tingting, QI Xiaolong, ZHOU Changyi, ZHANG Liming. Key Technologies and Application Prospects for High-definition Map in Off-road Environments [J]. Acta Armamentarii, 2023, 44(S2): 1-11. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||