
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (4): 240058-.doi: 10.12382/bgxb.2024.0058
Previous Articles Next Articles
HE Yang*( ), LI Gang
), LI Gang
Received:2024-01-18
Online:2025-04-30
Contact:
HE Yang
CLC Number:
HE Yang, LI Gang. Research on Trajectory Planning Control Method of Intelligent Vehicle Based on Velocity Obstacle Model[J]. Acta Armamentarii, 2025, 46(4): 240058-.
Add to citation manager EndNote|Ris|BibTeX
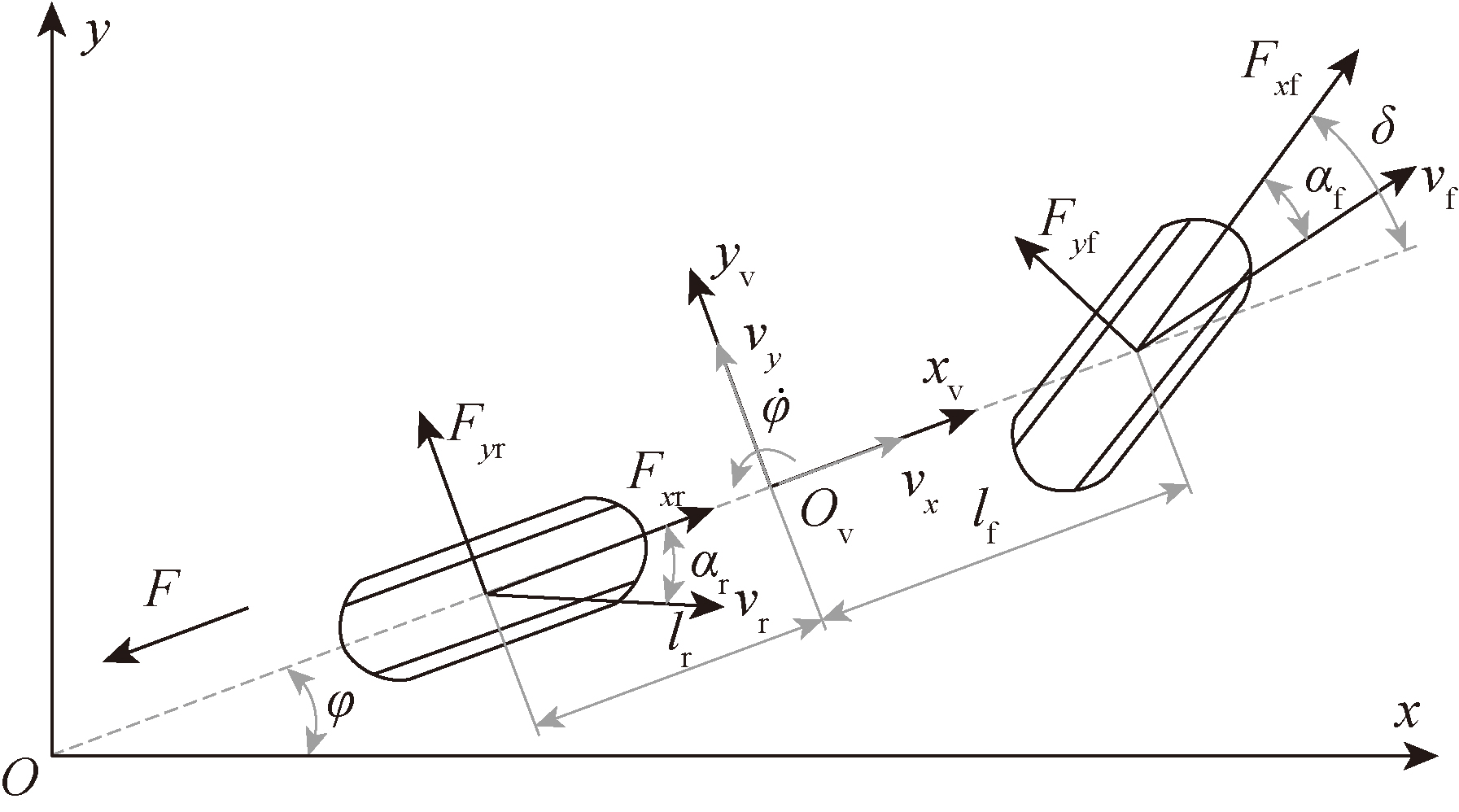
Fig.1 Vehicle yaw dynamic model
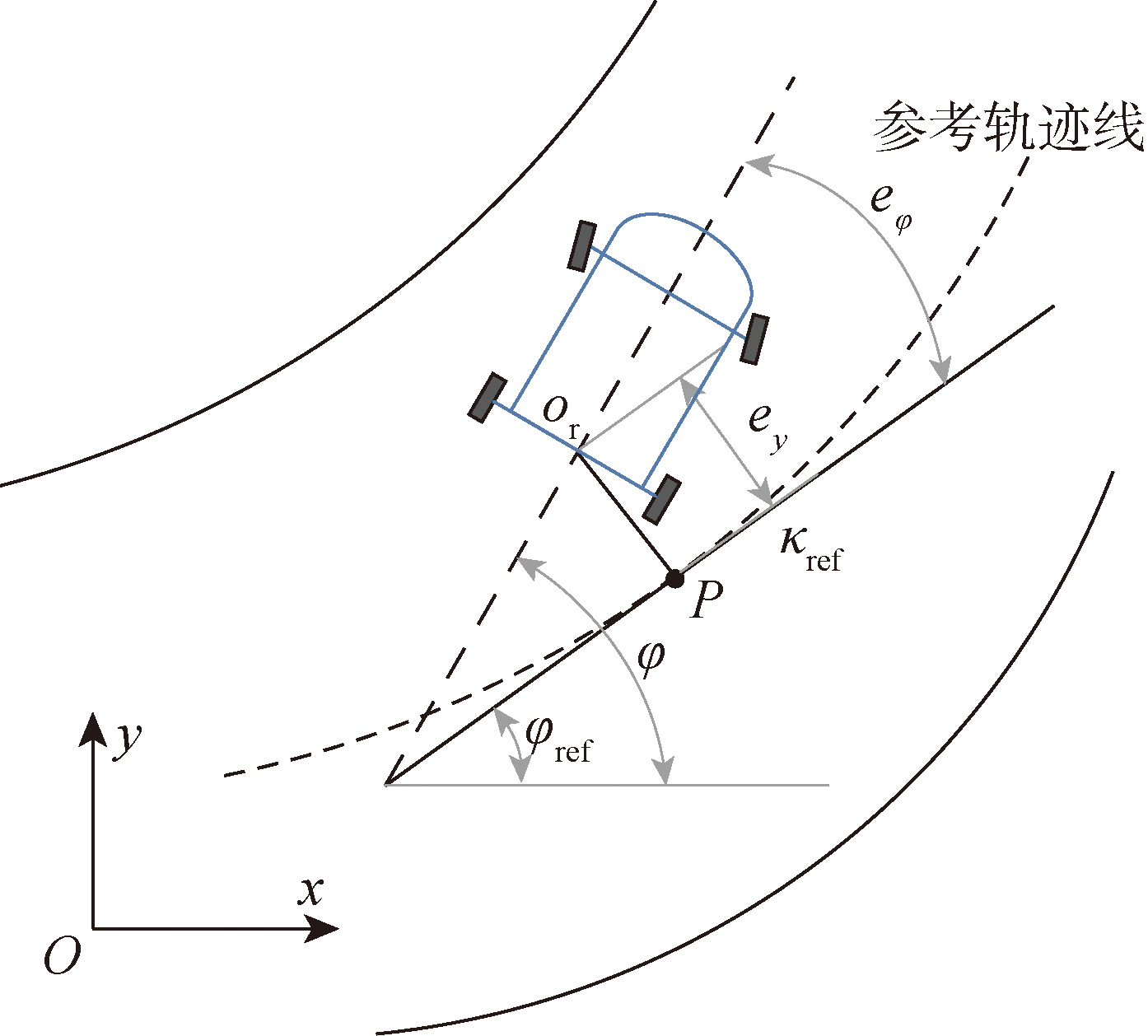
Fig.2 Trajectory tracking error model
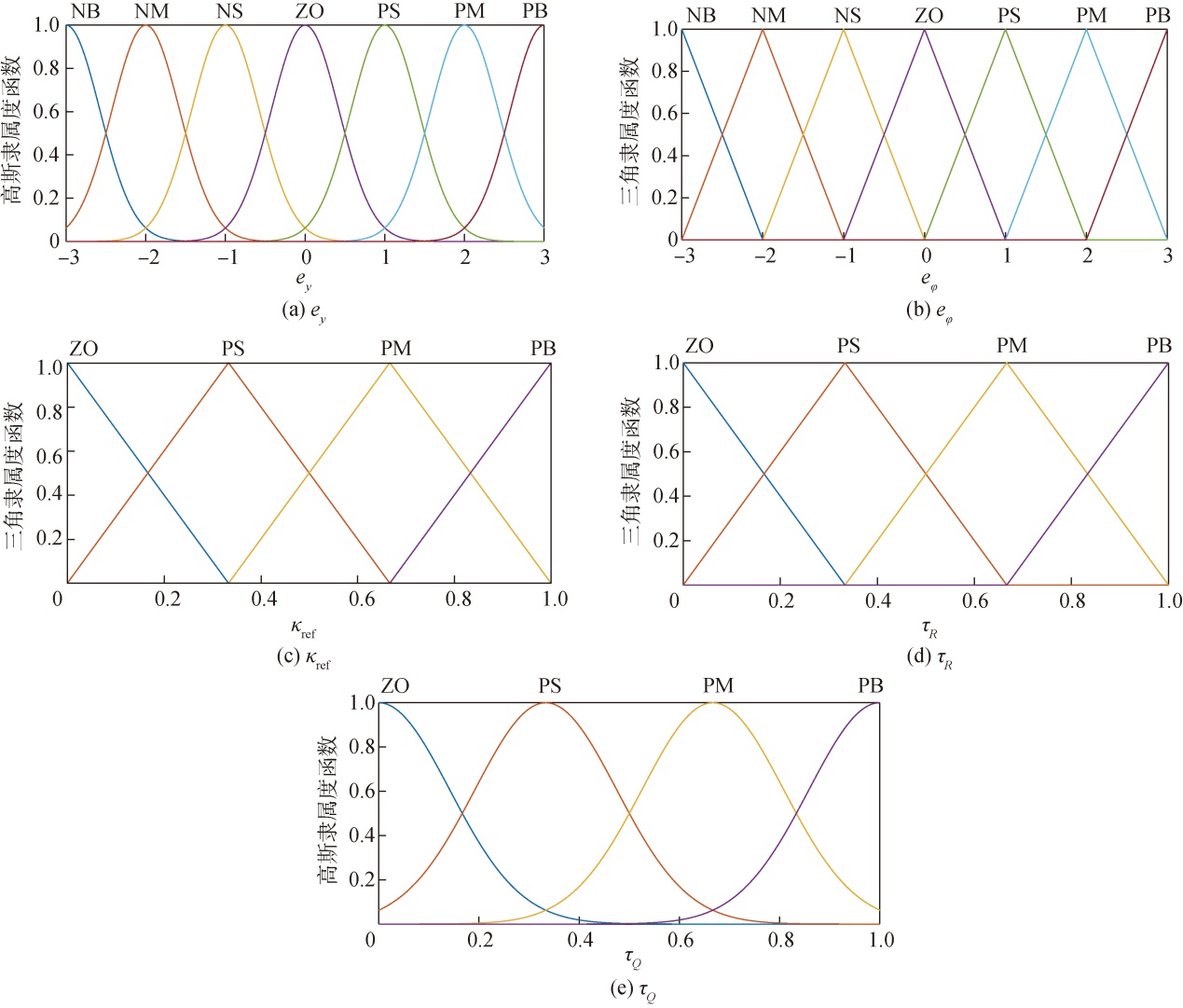
Fig.3 Membership functions of input and output
| eφ | ey | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB | PM | PM | PS | PM | PM | PB |
| NM | PM | PM | PS | PS | PS | PM | PM |
| NS | PM | PS | PS | ZO | PS | PS | PM |
| ZO | PB | PS | PS | ZO | PS | PS | PB |
| PS | PM | PS | PS | ZO | PS | PS | PM |
| PM | PM | PM | PS | PS | PS | PM | PM |
| PB | PB | PM | PS | PS | PS | PM | PB |
Table 1 Fuzzy rules of τQ
| eφ | ey | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB | PM | PM | PS | PM | PM | PB |
| NM | PM | PM | PS | PS | PS | PM | PM |
| NS | PM | PS | PS | ZO | PS | PS | PM |
| ZO | PB | PS | PS | ZO | PS | PS | PB |
| PS | PM | PS | PS | ZO | PS | PS | PM |
| PM | PM | PM | PS | PS | PS | PM | PM |
| PB | PB | PM | PS | PS | PS | PM | PB |
| κref | ey | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| ZO | PB | PM | PS | ZO | PS | PM | PB |
| PS | PM | PS | PS | ZO | PS | PS | PM |
| PM | PM | PS | PS | PM | PS | PS | PM |
| PB | PB | PM | PM | PB | PM | PM | PB |
Table 2 Fuzzy rules of τR
| κref | ey | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| ZO | PB | PM | PS | ZO | PS | PM | PB |
| PS | PM | PS | PS | ZO | PS | PS | PM |
| PM | PM | PS | PS | PM | PS | PS | PM |
| PB | PB | PM | PM | PB | PM | PM | PB |

Fig.4 Response surface
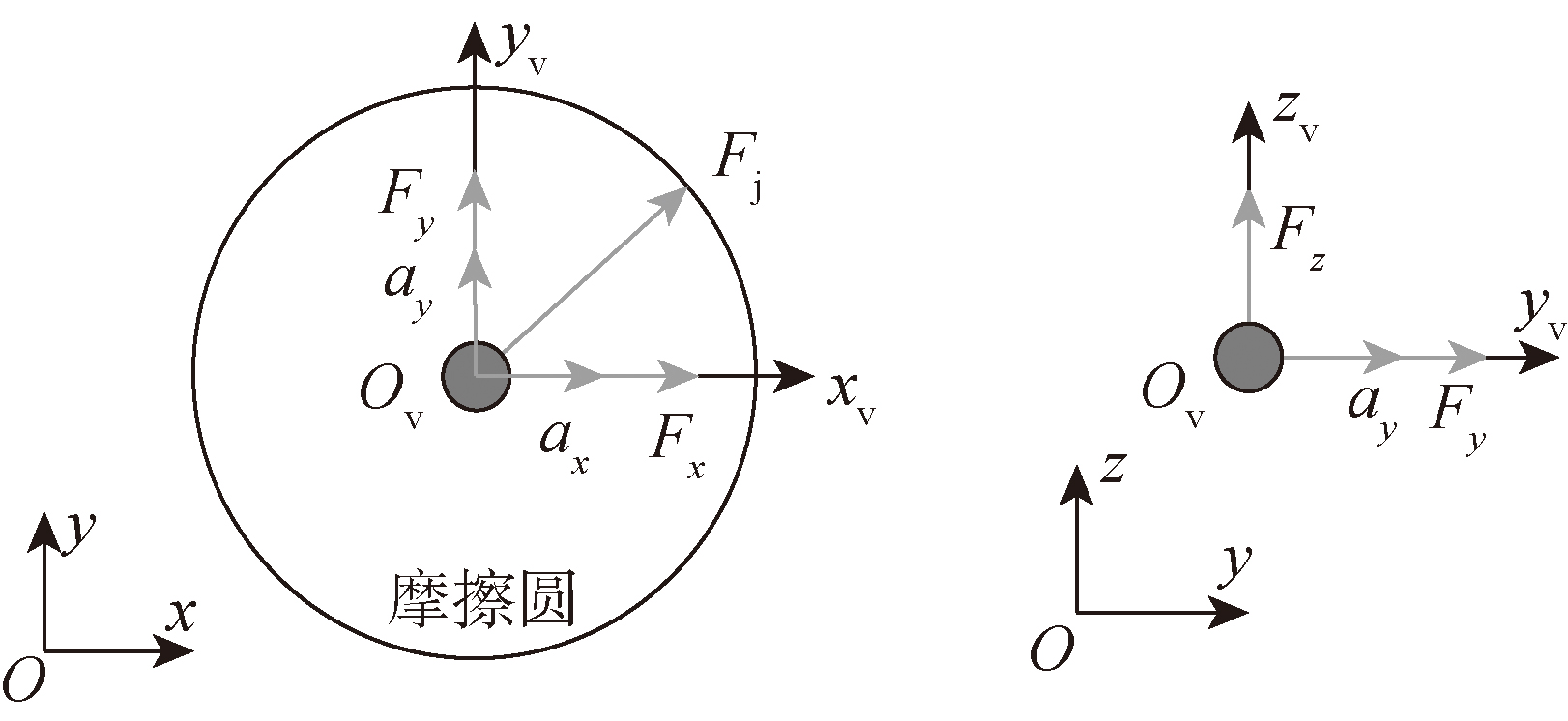
Fig.5 Vehicle point mass model
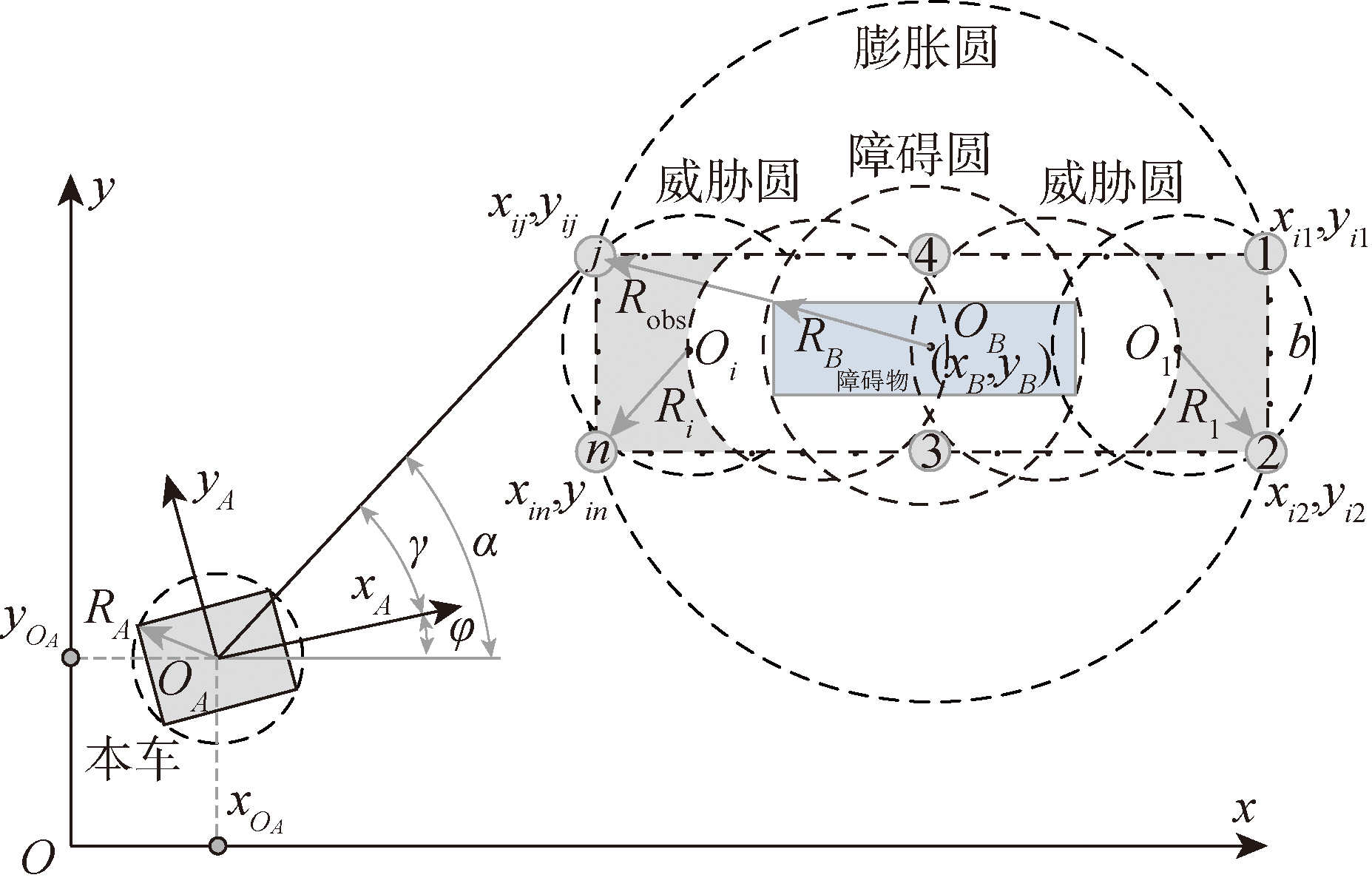
Fig.6 Obstacle expansive model
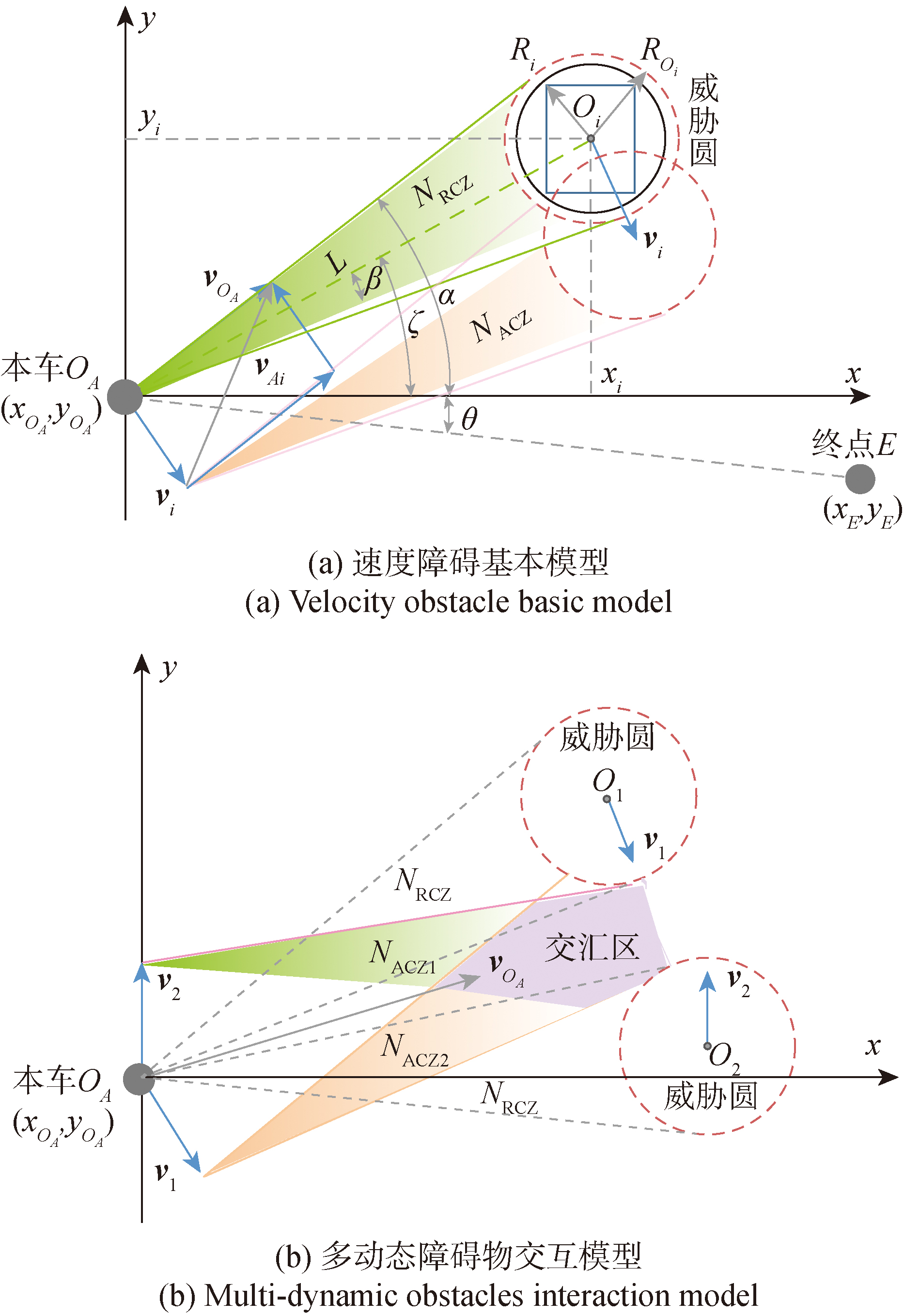
Fig.7 Velocity obstacle model of intelligent vehicle
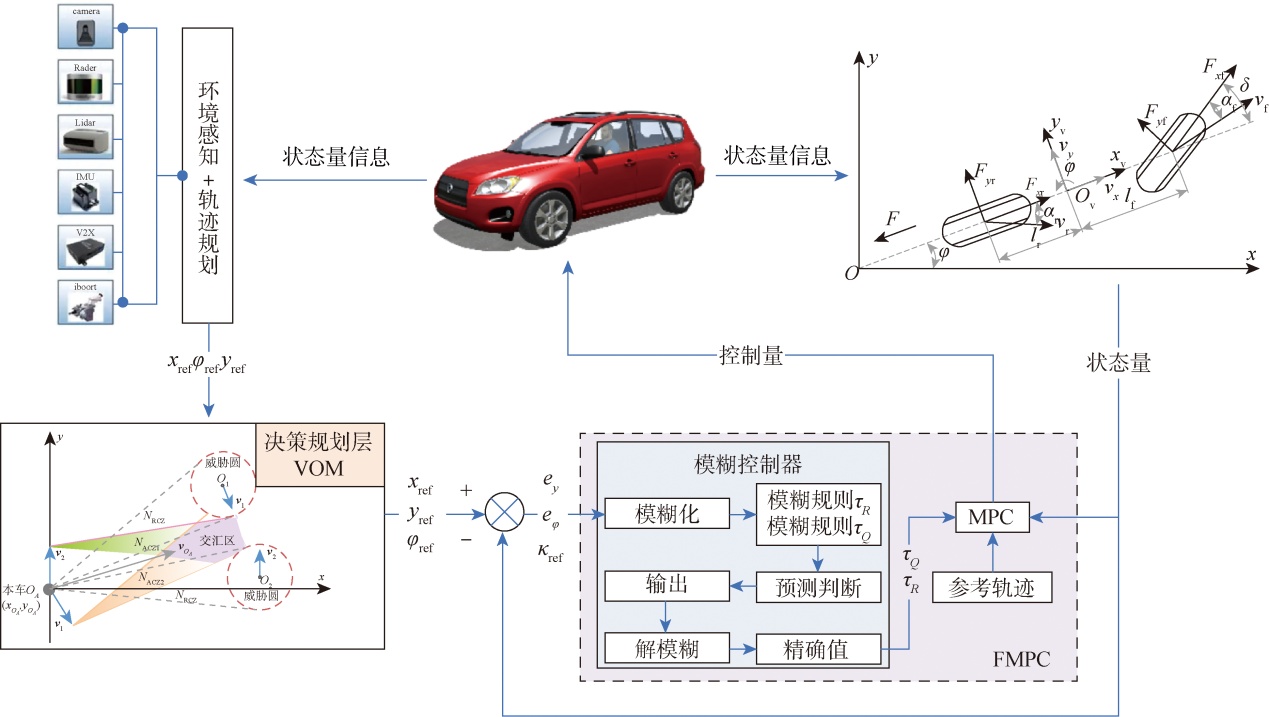
Fig.8 Logic framework of trajectory planning of intelligent vehicle based on VOM
| 参数 | 数值 |
|---|---|
| 长×宽×高/m | 4.63×1.82×1.71 |
| 簧载质量m/kg | 1430 |
| 转动惯量Ix/(kg·m2) | 717.7 |
| 转动惯量Iy/(kg·m2) | 2059.2 |
| 转动惯量Iz/(kg·m2) | 2059.2 |
| 轴距l/m | 2.68 |
| 前轮距Tf/m | 1.63 |
| 后轮距Tr/m | 1.64 |
| 质心高度h/m | 0.61 |
| 轮胎纵向刚度Csf、Csr/(N·m-1) | 8×105 |
| 前轮侧偏刚度 /(N·rad-1) | 7×104 |
| 后轮侧偏刚度 /(N·rad-1) | 6.5×104 |
| 轮胎规格 | 235/55 R18 |
Table 3 Related parameters of SUV
| 参数 | 数值 |
|---|---|
| 长×宽×高/m | 4.63×1.82×1.71 |
| 簧载质量m/kg | 1430 |
| 转动惯量Ix/(kg·m2) | 717.7 |
| 转动惯量Iy/(kg·m2) | 2059.2 |
| 转动惯量Iz/(kg·m2) | 2059.2 |
| 轴距l/m | 2.68 |
| 前轮距Tf/m | 1.63 |
| 后轮距Tr/m | 1.64 |
| 质心高度h/m | 0.61 |
| 轮胎纵向刚度Csf、Csr/(N·m-1) | 8×105 |
| 前轮侧偏刚度 /(N·rad-1) | 7×104 |
| 后轮侧偏刚度 /(N·rad-1) | 6.5×104 |
| 轮胎规格 | 235/55 R18 |
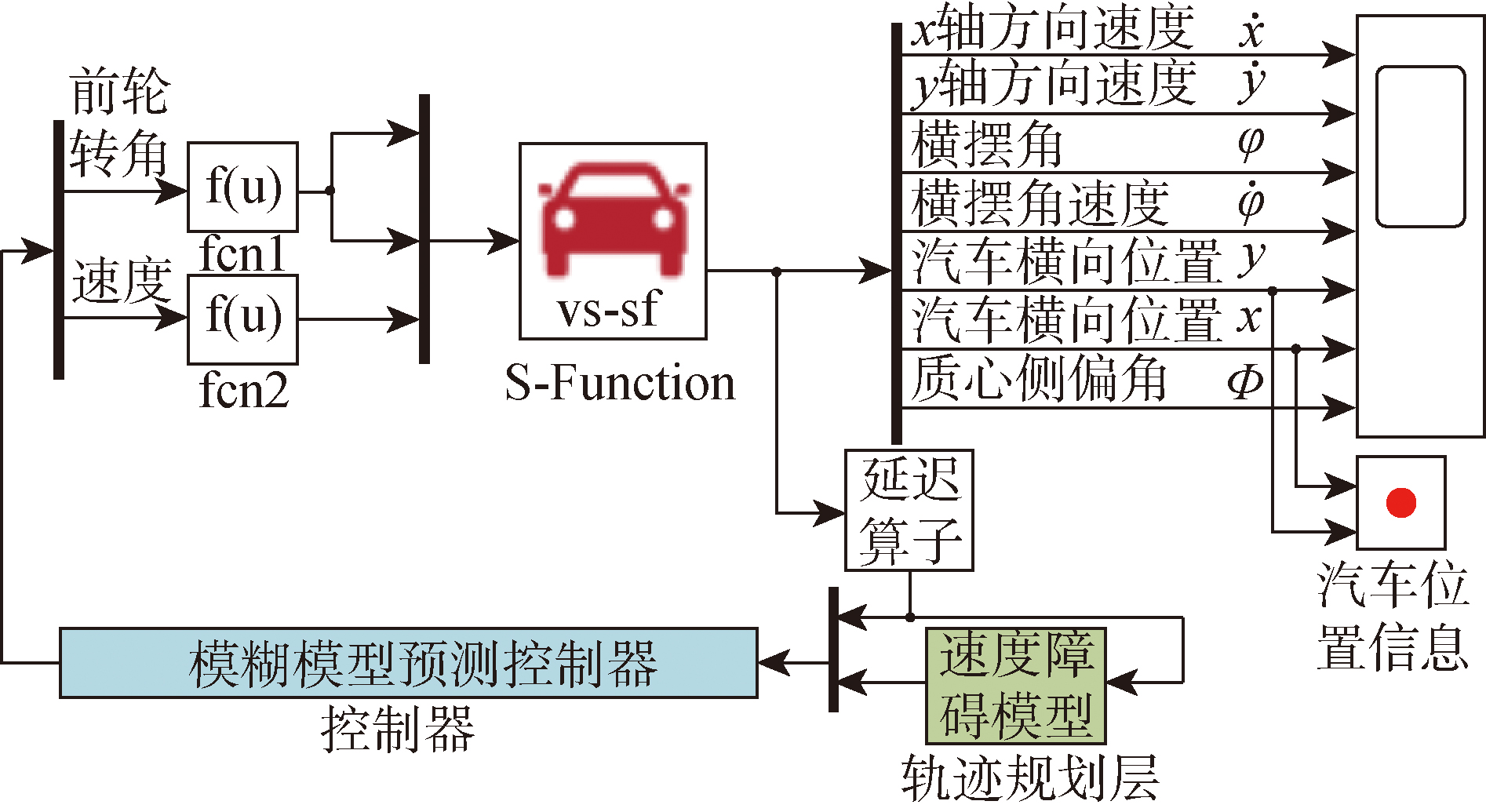
Fig.9 Simulation model

Fig.10 Response characteristics of steering angle
| 参数 | 车速/(km·h-1) | MPC | FMPC | FMPC优化量/% |
|---|---|---|---|---|
| 超调量/% | 60 | 12.2 | 7.9 | 4.3 |
| 100 | 27.1 | 14.7 | 12.4 | |
| 上升时间/s | 60 | 0.43 | 0.35 | 18.6 |
| 100 | 0.44 | 0.37 | 15.9 | |
| 峰值时间/s | 60 | 0.93 | 0.71 | 23.6 |
| 100 | 0.95 | 0.81 | 14.7 | |
| 过度时间/s | 60 | 1.92 | 0.98 | 48.9 |
| 100 | 2.27 | 1.21 | 46.7 |
Table 4 Statistical values
| 参数 | 车速/(km·h-1) | MPC | FMPC | FMPC优化量/% |
|---|---|---|---|---|
| 超调量/% | 60 | 12.2 | 7.9 | 4.3 |
| 100 | 27.1 | 14.7 | 12.4 | |
| 上升时间/s | 60 | 0.43 | 0.35 | 18.6 |
| 100 | 0.44 | 0.37 | 15.9 | |
| 峰值时间/s | 60 | 0.93 | 0.71 | 23.6 |
| 100 | 0.95 | 0.81 | 14.7 | |
| 过度时间/s | 60 | 1.92 | 0.98 | 48.9 |
| 100 | 2.27 | 1.21 | 46.7 |
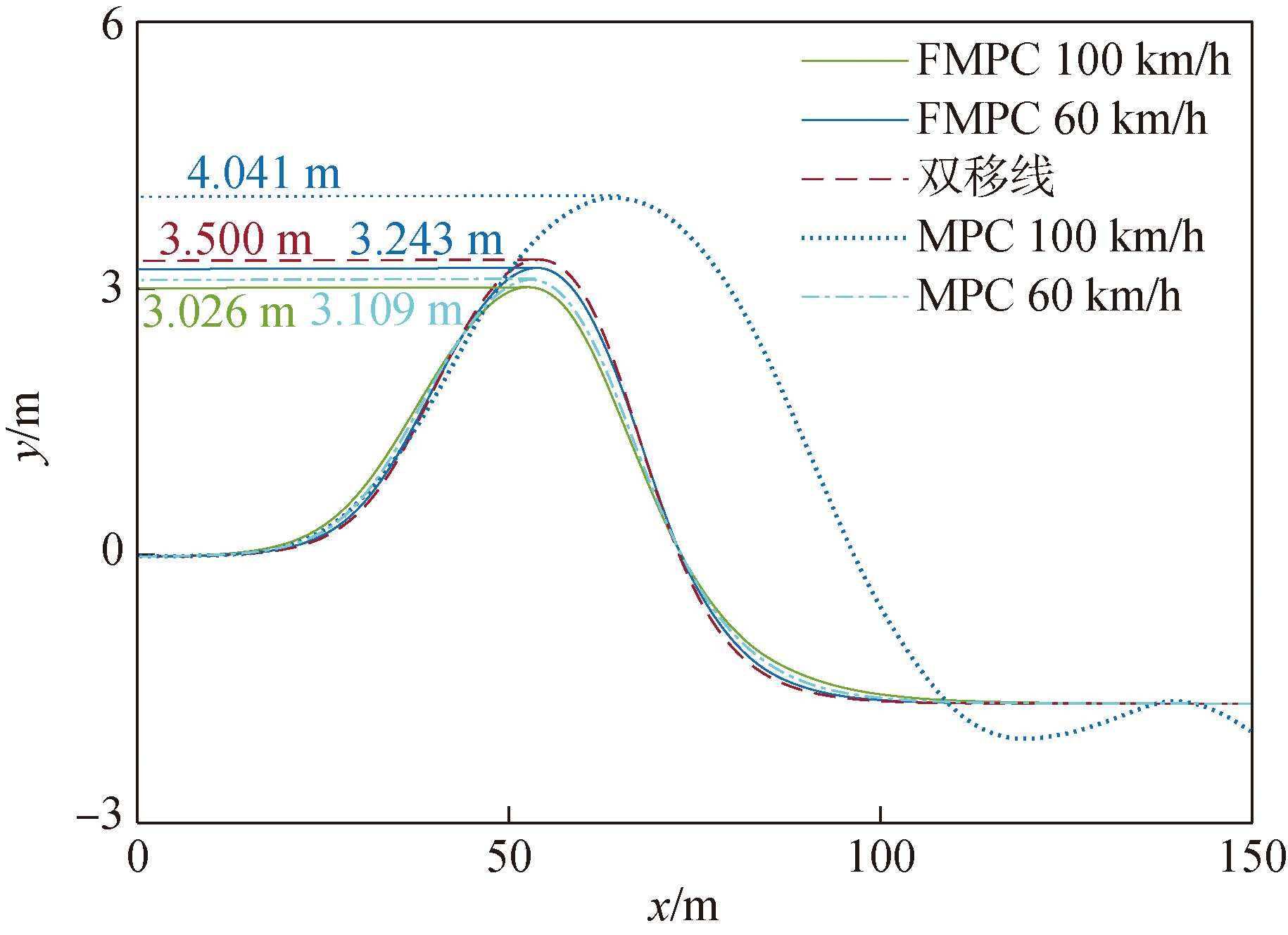
Fig.11 Double lane change trajectory tracking
| 车速/(km·h-1) | MPC | FMPC | FMPC优化量/% |
|---|---|---|---|
| 60 | 0.23 | 0.10 | 56.5 |
| 100 | 0.69 | 0.31 | 55.1 |
Table 5 Trajectory tracking error m
| 车速/(km·h-1) | MPC | FMPC | FMPC优化量/% |
|---|---|---|---|
| 60 | 0.23 | 0.10 | 56.5 |
| 100 | 0.69 | 0.31 | 55.1 |
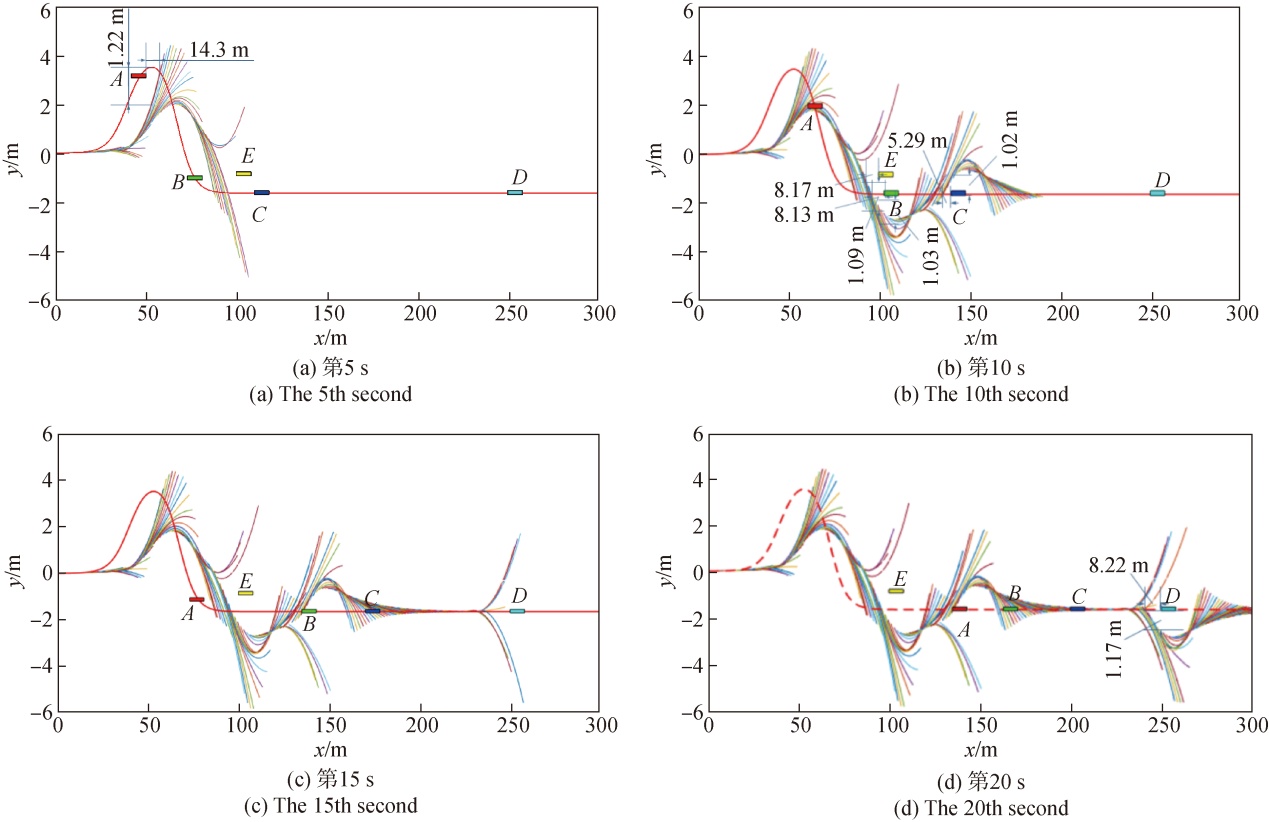
Fig.12 Dynamic and static obstacles avoidance at 60km/h
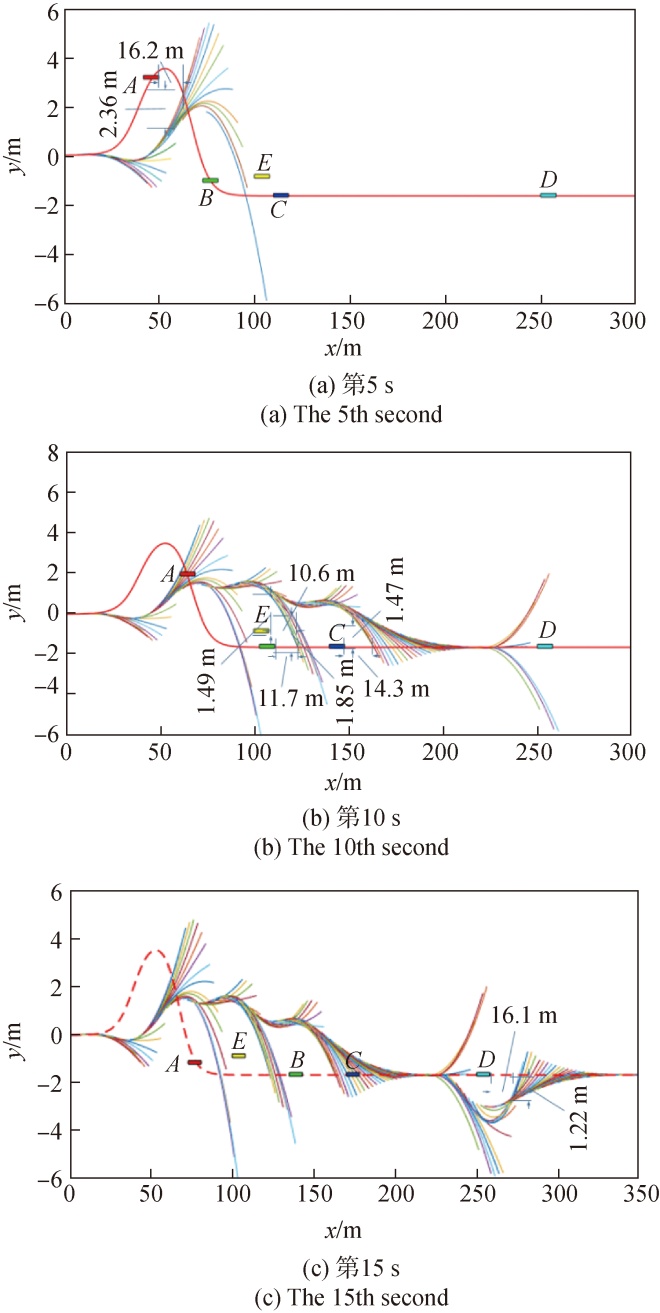
Fig.13 Dynamic and static obstacles avoidance at 100km/h
| 障碍物 | 方向 | 车速/(km·h-1) | |
|---|---|---|---|
| 60 | 100 | ||
| A | 纵向 | 14.3 | 16.2 |
| 横向 | 1.22 | 2.36 | |
| B | 纵向 | 8.13 | 11.7 |
| 横向 | 1.03 | 1.85 | |
| C | 纵向 | 5.29 | 14.3 |
| 横向 | 1.02 | 1.47 | |
| D | 纵向 | 8.22 | 16.1 |
| 横向 | 1.17 | 1.22 | |
| E | 纵向 | 8.17 | 10.6 |
| 横向 | 1.09 | 1.49 | |
Table 6 Safety margin
| 障碍物 | 方向 | 车速/(km·h-1) | |
|---|---|---|---|
| 60 | 100 | ||
| A | 纵向 | 14.3 | 16.2 |
| 横向 | 1.22 | 2.36 | |
| B | 纵向 | 8.13 | 11.7 |
| 横向 | 1.03 | 1.85 | |
| C | 纵向 | 5.29 | 14.3 |
| 横向 | 1.02 | 1.47 | |
| D | 纵向 | 8.22 | 16.1 |
| 横向 | 1.17 | 1.22 | |
| E | 纵向 | 8.17 | 10.6 |
| 横向 | 1.09 | 1.49 | |

Fig.14 Speed tracking curve
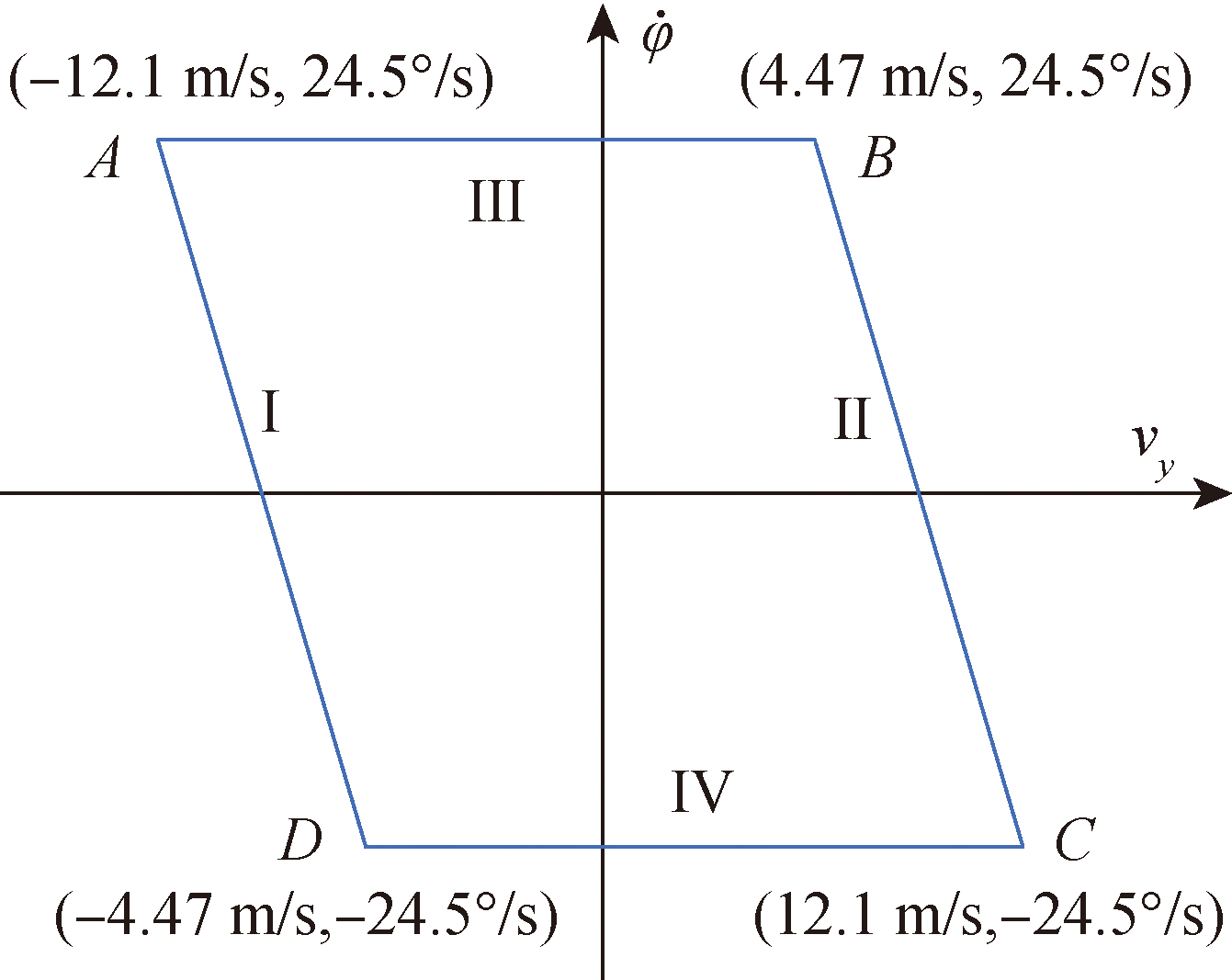
Fig.15 Schematic diagram of vehicle yaw envelope region
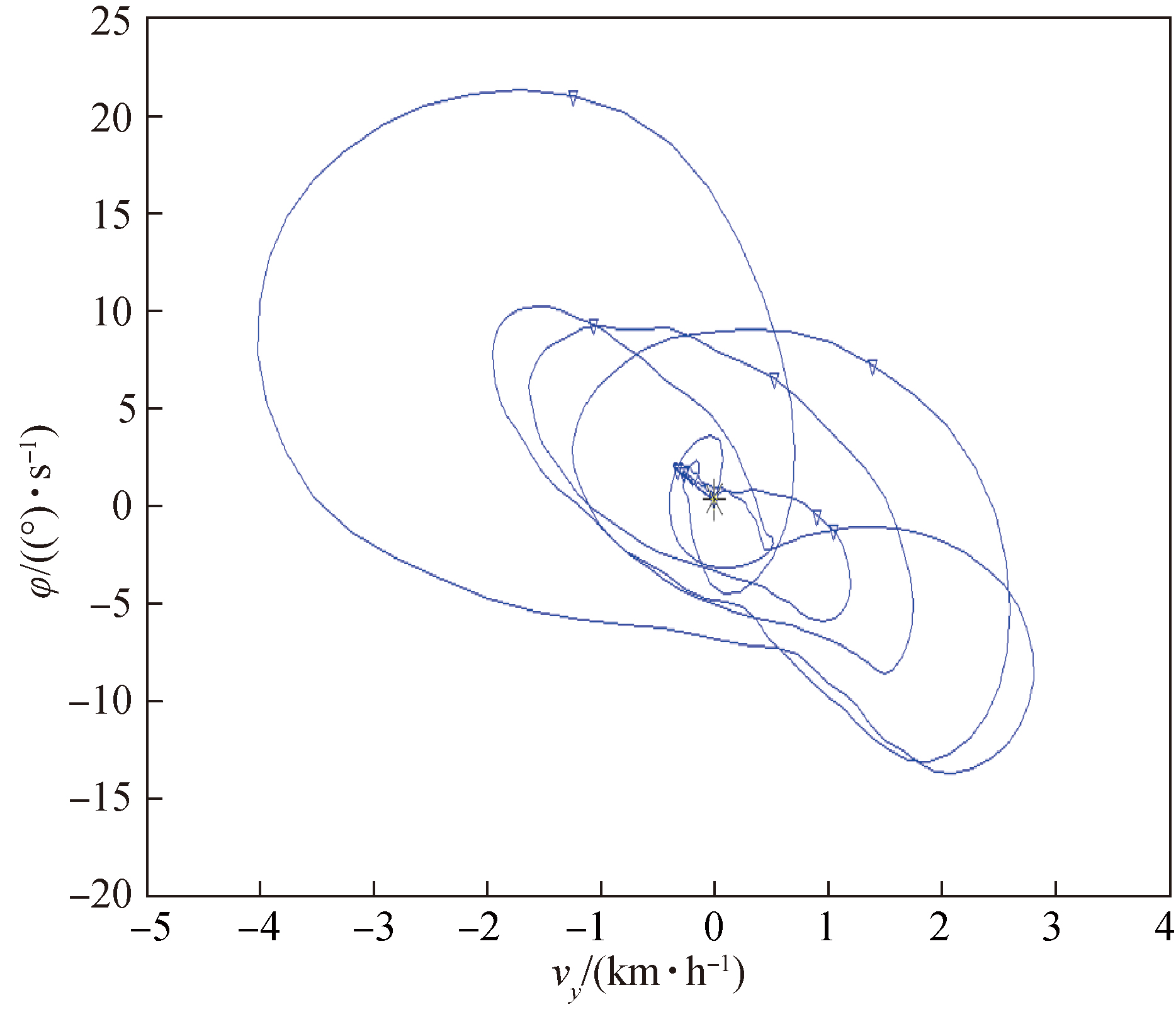
Fig.16 Relation between lateral velocity and yaw rate
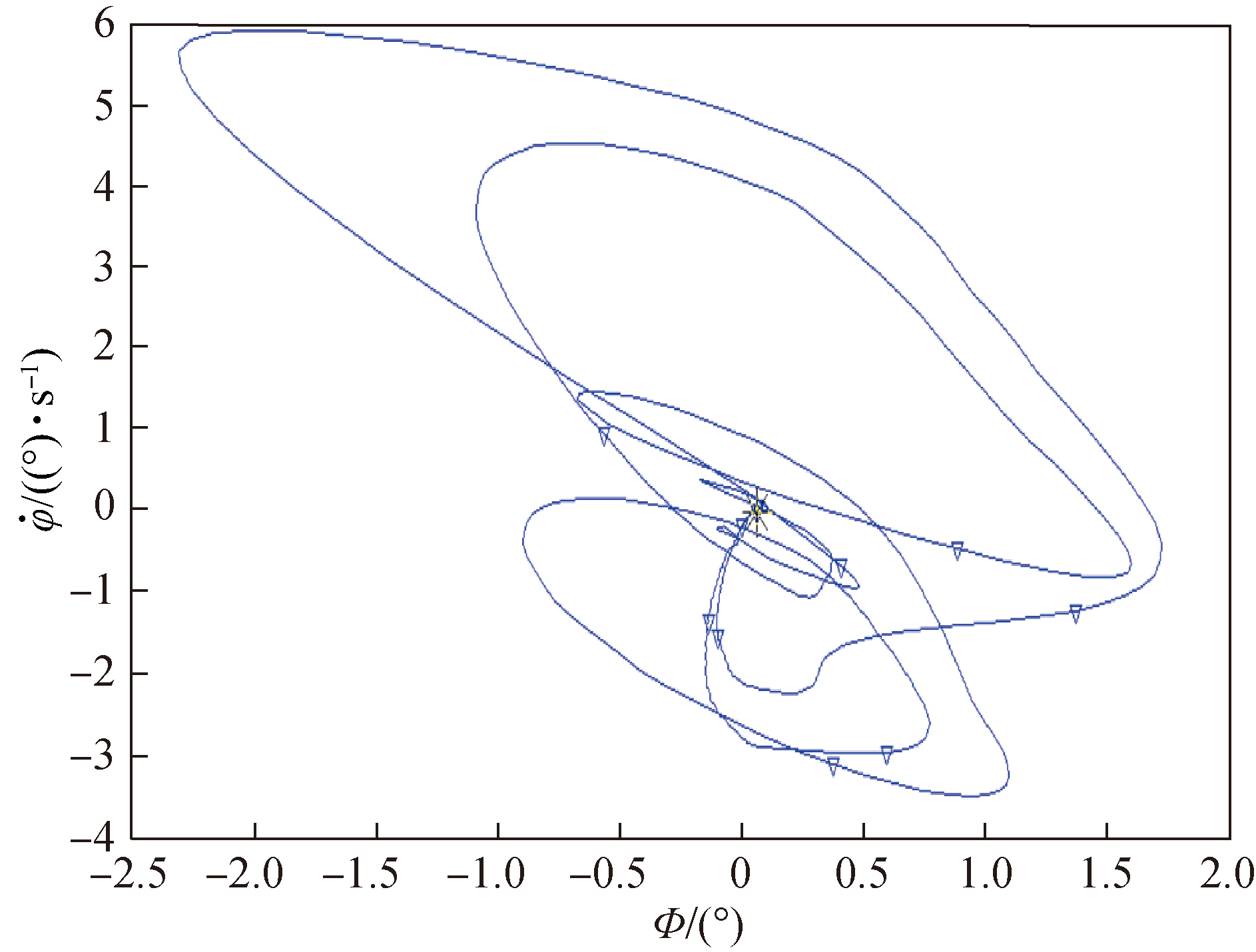
Fig.17 Relation between centroid side slip angle and yaw rate
| [1] |
龚建伟, 龚乘, 林云龙, 等. 智能车辆规划与控制策略学习方法综述[J]. 北京理工大学学报, 2022, 42(7):665-674.
|
|
|
|
| [2] |
|
| [3] |
李新凯, 虎晓诚, 马萍, 等. 基于改进DDPG的无人驾驶避障跟踪控制[J]. 华南理工大学学报(自然科学版), 2023, 51(11):44-55.
doi: 10.12141/j.issn.1000-565X.220747 |
|
doi: 10.12141/j.issn.1000-565X.220747 |
|
| [4] |
|
| [5] |
王国栋, 刘立, 孟宇, 等. 一体式车辆避撞轨迹规划与跟踪控制[J]. 交通运输系统工程与信息, 2022, 22(2):127-136.
|
|
|
|
| [6] |
李耀华, 范吉康, 刘洋, 等. 自适应双时域参数MPC的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4):528-539.
|
|
|
|
| [7] |
|
| [8] |
李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7):1174-1183.
|
|
|
|
| [9] |
方秋雨, 张蕴霖, 麻壮壮, 等. 未知环境下基于控制障碍函数的无人车轨迹规划[J]. 兵工学报, 2023, 44(增刊2):90-100.
|
|
doi: 10.12382/bgxb.2023.0882 |
|
| [10] |
王明强, 王震坡, 张雷. 基于碰撞风险评估的智能汽车局部路径规划方法研究[J]. 机械工程学报, 2021, 57(10):28-40.
doi: 10.3901/JME.2021.10.028 |
|
doi: 10.3901/JME.2021.10.028 |
|
| [11] |
|
| [12] |
|
| [13] |
张利鹏, 苏泰, 严勇. 基于采样区域优化的智能车辆轨迹规划方法[J]. 机械工程学报, 2022, 58(14):276-287.
doi: 10.3901/JME.2022.14.276 |
|
doi: 10.3901/JME.2022.14.276 |
|
| [14] |
杨彬, 宋学伟, 高振海. 考虑车辆运动约束的最优避障轨迹规划算法[J]. 汽车工程, 2021, 43(4):562-570.
|
|
|
|
| [15] |
肖宏宇, 付志强, 陈慧勇. 面向低速自动驾驶车辆的避障规划研究[J]. 同济大学学报(自然科学版), 2019, 47(增刊1):164-170.
|
|
|
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
陈虹, 申忱, 郭洪艳, 等. 面向动态避障的智能汽车滚动时域路径规划[J]. 中国公路学报, 2019, 32(1):162-172.
|
|
|
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
裴红蕾. 智能汽车换道避障路径规划与跟踪方法[J]. 中国安全科学学报, 2018, 28(9):26-32.
doi: 10.16265/j.cnki.issn1003-3033.2018.09.005 |
|
doi: 10.16265/j.cnki.issn1003-3033.2018.09.005 |
|
| [26] |
|
| [27] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3):585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
| [28] |
王嘉文, 孙晨晨, 赵靖, 等. 交通事件下路段通行能力多层模糊估计方法[J]. 交通运输系统工程与信息, 2023, 23(6):100-110.
|
|
|
|
| [29] |
|
| [30] |
|
| [31] |
刘凯, 龚建伟, 陈舒平, 等. 高速无人驾驶车辆最优运动规划与控制的动力学建模分析[J]. 机械工程学报, 2018, 54(14):141-151.
doi: 10.3901/JME.2018.14.141 |
|
doi: 10.3901/JME.2018.14.141 |
| [1] | QIN Boyu, ZHANG Dong, TANG Shuo. A Discussion on Key Issues and Technologies of Aircraft Swarm Safety Control [J]. Acta Armamentarii, 2025, 46(4): 240215-. |
| [2] | NAN Wenjiang, YAN Xunliang, YANG Yuxuan, WANG Peichen. Rapid Planning of Longitudinal-lateral Comprehensive Control Reentry Gliding Trajectory Considering Time Constraints [J]. Acta Armamentarii, 2025, 46(3): 240154-. |
| [3] | LI Yaxuan, LIU Xinfu. Real-time Trajectory Planning for Fixed-wing UAVs Based on Exact Convex Relaxation [J]. Acta Armamentarii, 2025, 46(3): 240362-. |
| [4] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [5] | WANG Dongzhen, ZHANG Yue, ZHAO Yu, HUANG Daqing. A UAV Trajectory Optimization Method Based on RRT-Dubins [J]. Acta Armamentarii, 2024, 45(8): 2761-2773. |
| [6] | WANG Peichen, YAN Xunliang, NAN Wenjiang, LI Xinguo. A Rapid and Near Analytic Planning Method for Gliding Trajectory under Time Constraints [J]. Acta Armamentarii, 2024, 45(7): 2294-2305. |
| [7] | YIN Qiulin, CHEN Qi, WANG Zhongyuan, WANG Qinghai. Rapid Trajectory Planning for Glide-guided Projectiles in Single-gun Multi-shot Scenarios Considering Time-spatial Coordination [J]. Acta Armamentarii, 2024, 45(3): 798-809. |
| [8] | MEI Zewei, LI Tianren, ZHU Jialin, SHAO Xingling, DING Tianyun, LIU Jun. A Trajectory Planning Method Based on DQN Variable Dynamic Intelligent Decision [J]. Acta Armamentarii, 2024, 45(12): 4395-4406. |
| [9] | DING Tianyun, XIA Yi, MEI Zewei, SHAO Xingling, LIU Jun. A DDPG-based Trajectory Planning Method for Collision Avoidance of Morphing Spacecraft [J]. Acta Armamentarii, 2024, 45(11): 3903-3914. |
| [10] | PEI Xinyue, YU Yong, LI Zheng, LI Jiaxun, YU Jianqiao. Control of Quick Turning of Missile with Lateral Thrust and Aerodynamics Based on Neural Network [J]. Acta Armamentarii, 2024, 45(10): 3564-3576. |
| [11] | JIA Yifei, JIANG Chaoyang. Dynamic Reconfigurable Adaptive UGV Formation System [J]. Acta Armamentarii, 2024, 45(10): 3654-3673. |
| [12] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| [13] | ZHAO Junmin, HE Haozhe, WANG Shaoqi, NIE Cong, JIAO Yingjie. Joint Trajectory Planning for Multiple UAVs Target Tracking and Obstacle Avoidance in a Complicated Environment [J]. Acta Armamentarii, 2023, 44(9): 2685-2696. |
| [14] | ZHANG Tian, JIN Shuxin, WANG Qiang, DUAN Xiaobo, LIU Tiecheng, NIU Haitao, HOU Zeng, YANG Yi, LIU Tong. High-Sensitivity Follow-up Control Technology Based on Micro-Inertial Sensors [J]. Acta Armamentarii, 2023, 44(2): 566-576. |
| [15] | ZHOU Xiaotian, REN Hongbin, SU Bo, QI Zhiquan, WANG Yang. Hierarchical Trajectory Planning Algorithm based on Differential Flatness [J]. Acta Armamentarii, 2023, 44(2): 394-405. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||