
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (7): 2110-2127.doi: 10.12382/bgxb.2023.0132
Previous Articles Next Articles
TIAN Hongqing1, MA Mingtao1, ZHANG Bo1, ZHENG Xunjia2,*( )
)
Received:2023-02-24
Online:2023-11-18
Contact:
ZHENG Xunjia
CLC Number:
TIAN Hongqing, MA Mingtao, ZHANG Bo, ZHENG Xunjia. Potential Field Exploring Tree Path Planning for Intelligent Vehicle in Off-road Environment[J]. Acta Armamentarii, 2024, 45(7): 2110-2127.
Add to citation manager EndNote|Ris|BibTeX
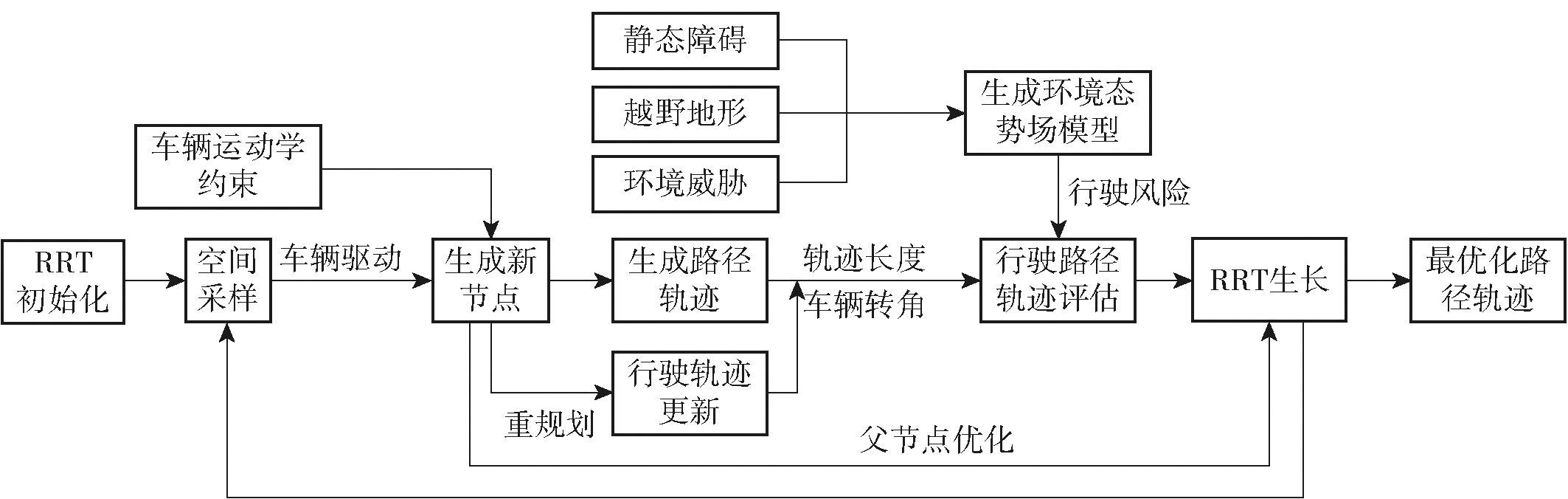
Fig.1 PFT* algorithm framework
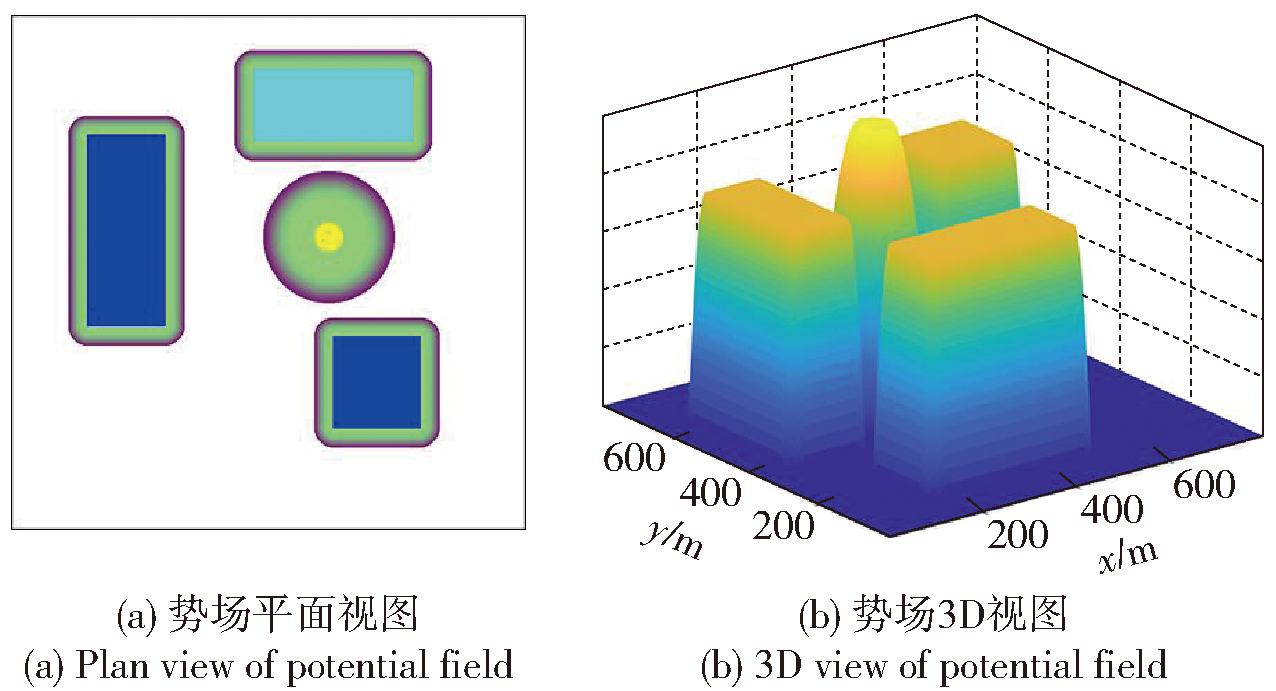
Fig.2 Scenario potential field map
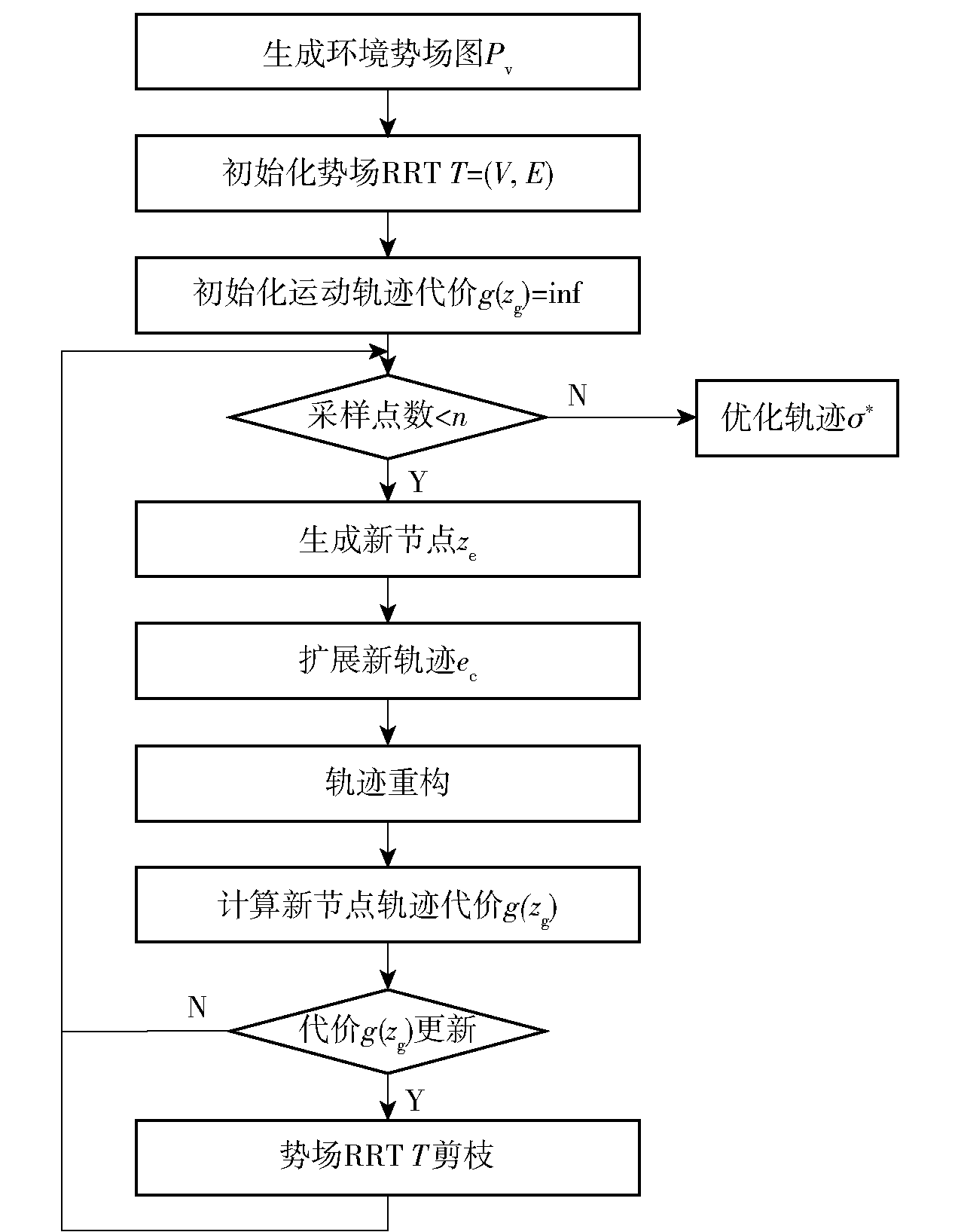
Fig.3 PFT* path planning algorithm flowchart
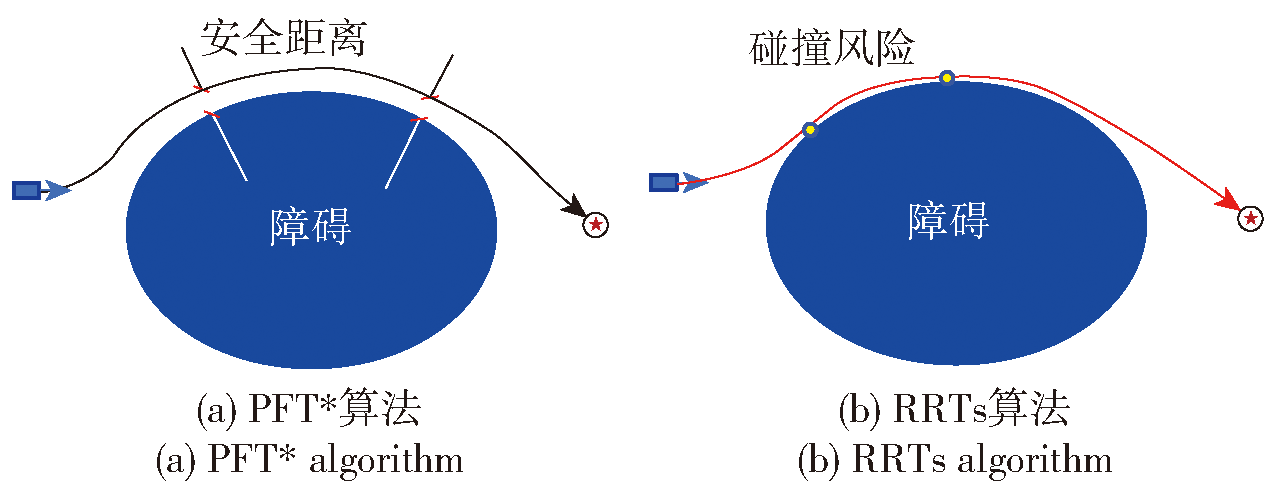
Fig.4 Comparison between PFT* and RRTs
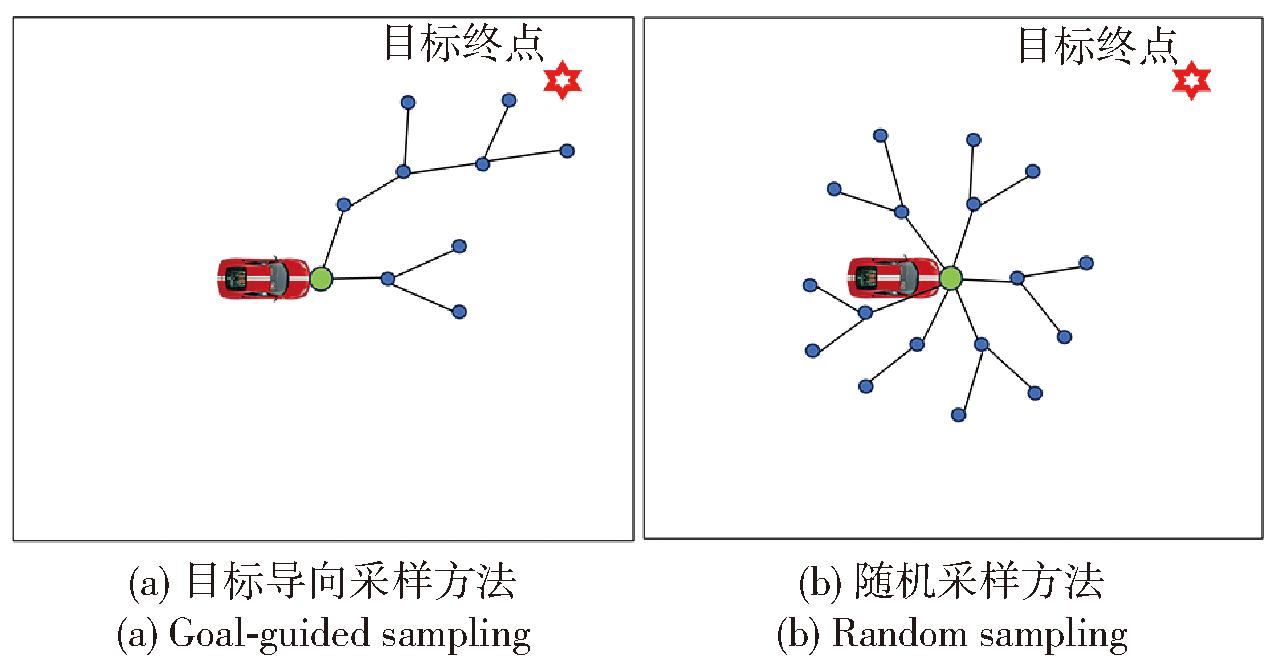
Fig.5 Comparison of searching directions of intelligent sampling and general sampling methods
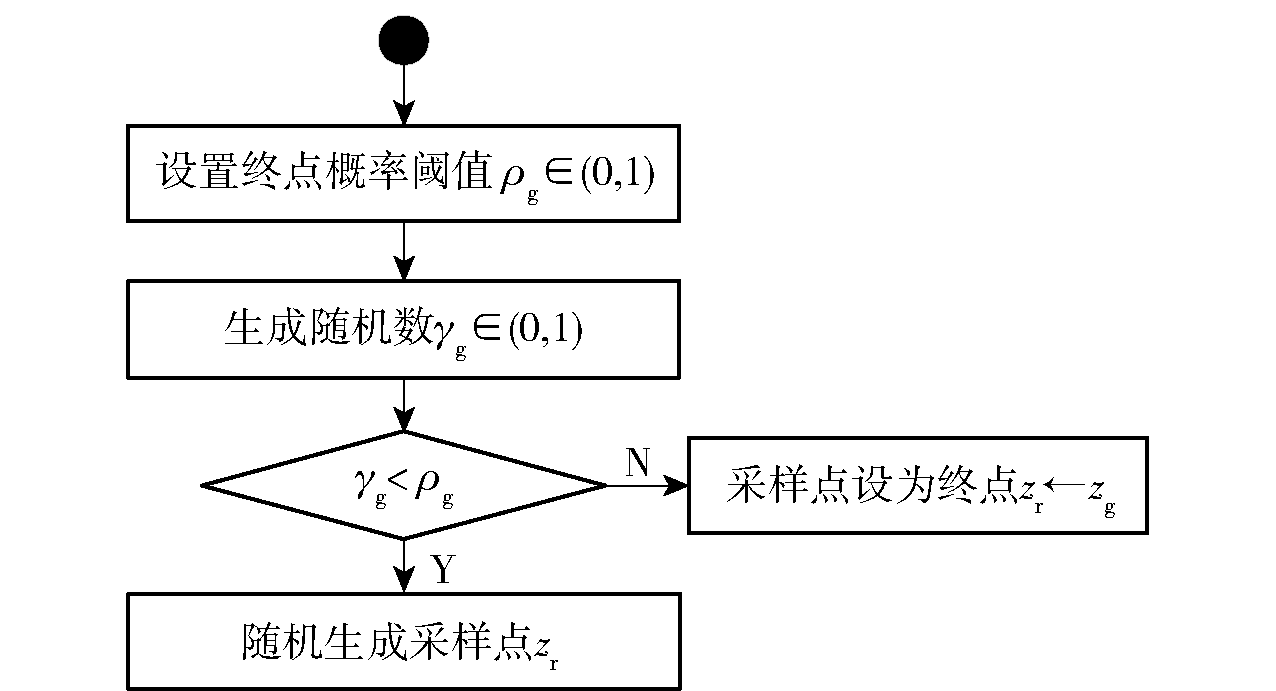
Fig.6 Intelligent sampling flowchart
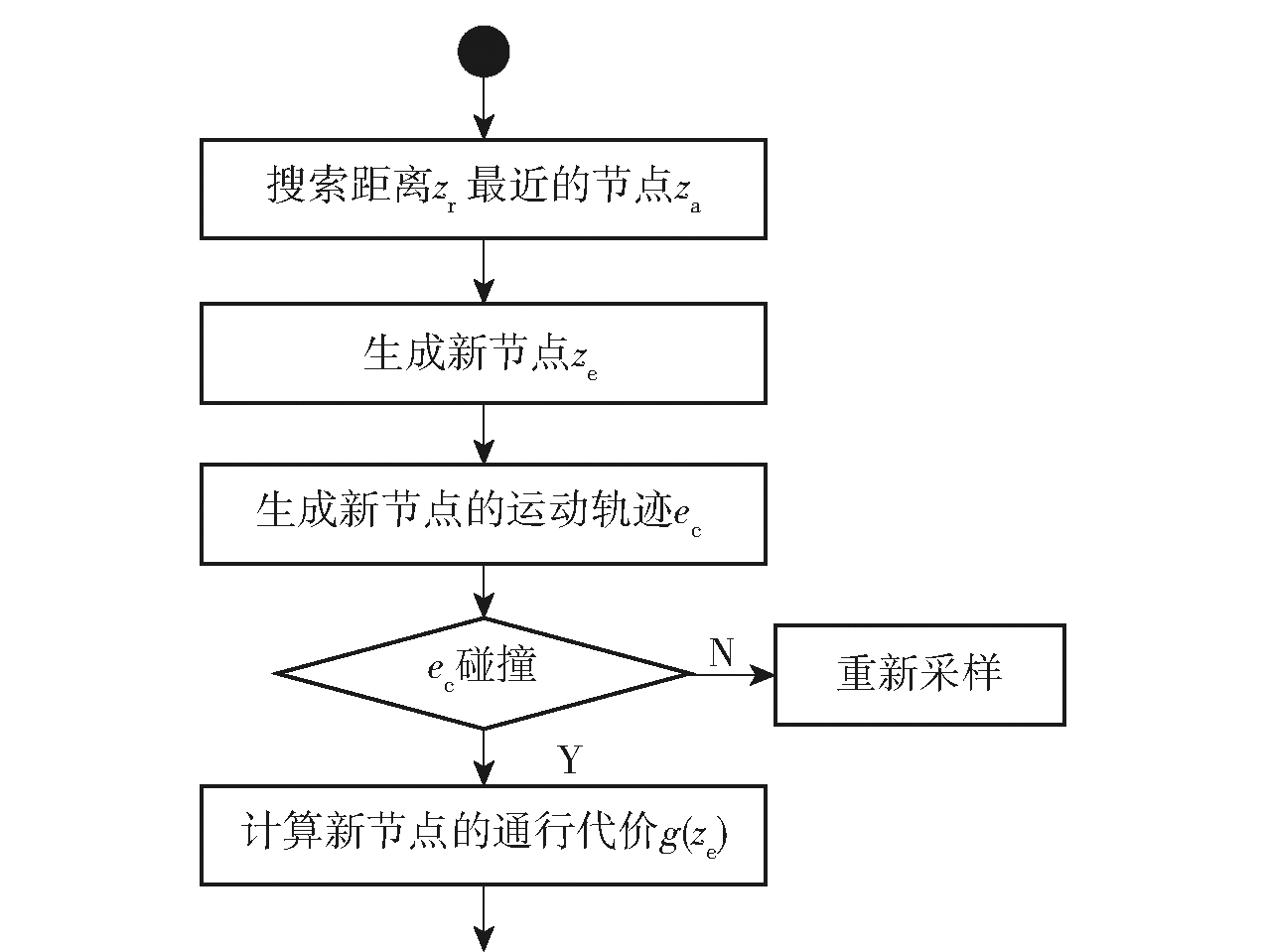
Fig.7 Vehicle trajectory generation flowchart
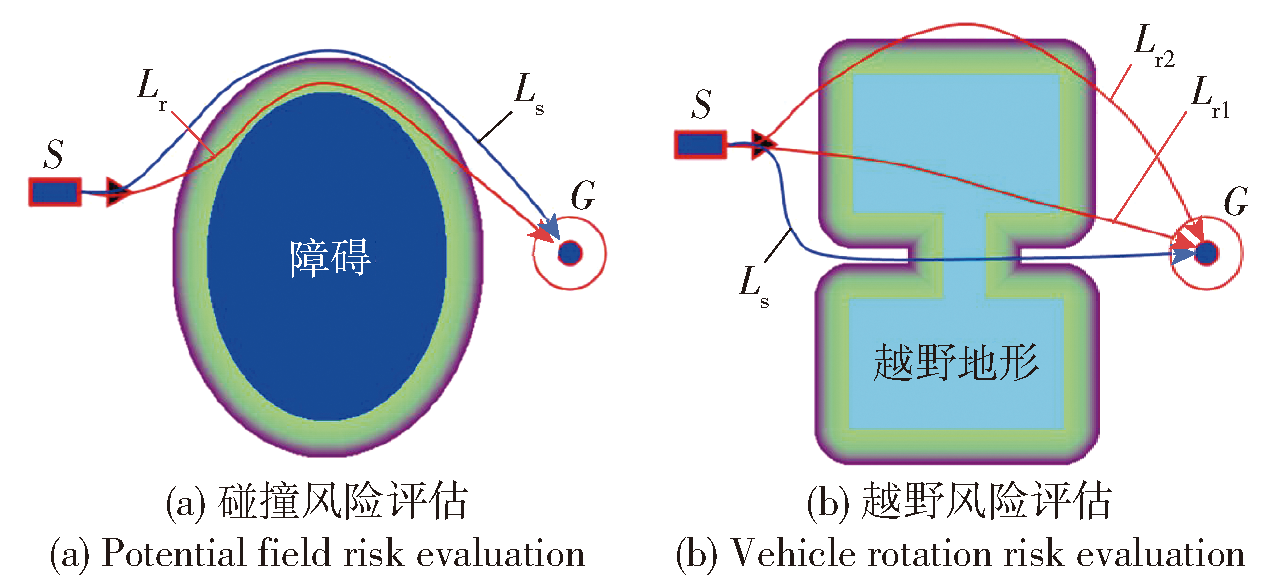
Fig.8 Vehicle path risk evaluation
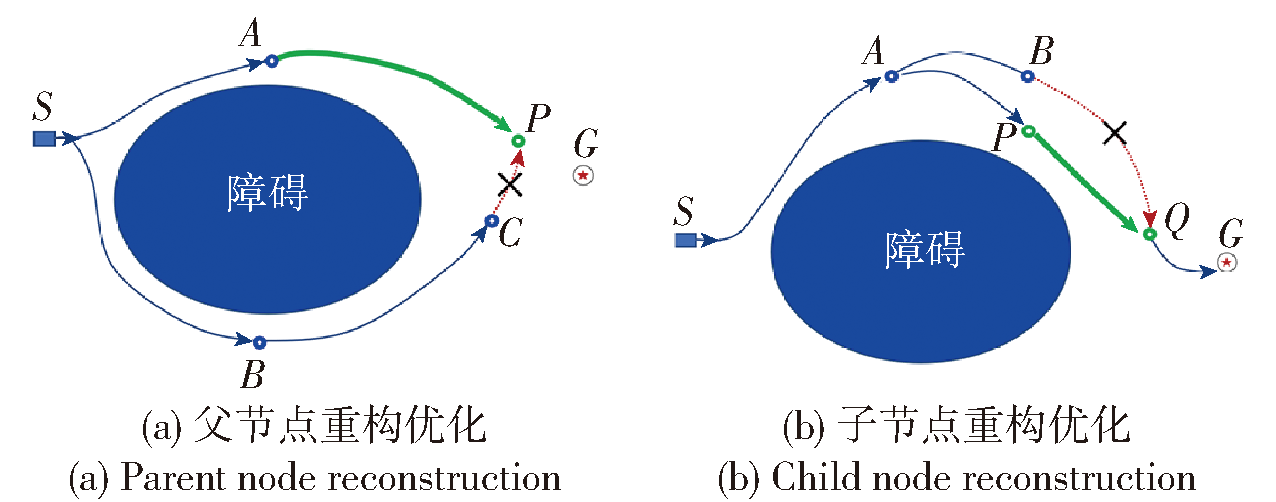
Fig.9 RRT reconstruction
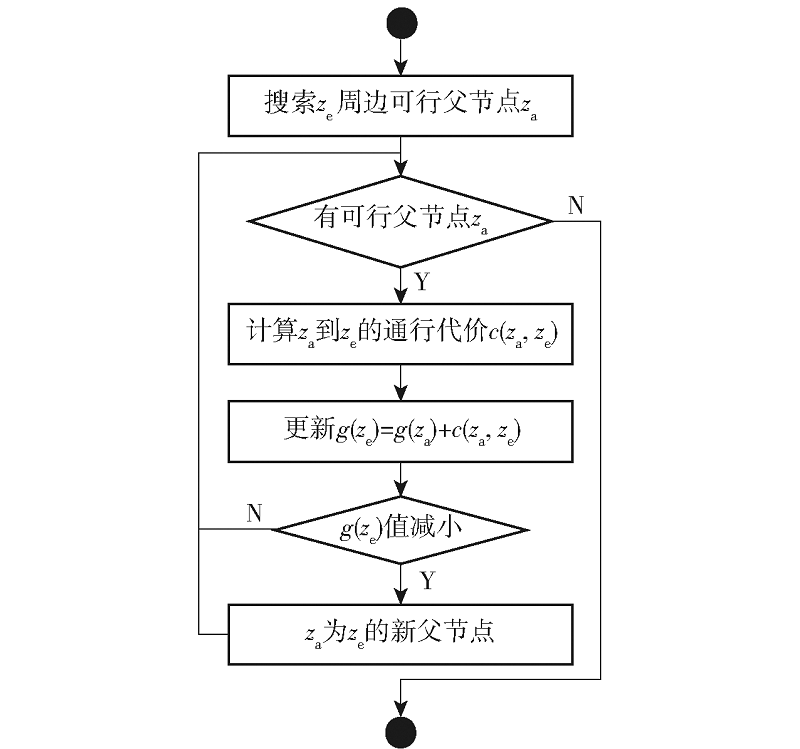
Fig.10 RRT parent node reconstruction
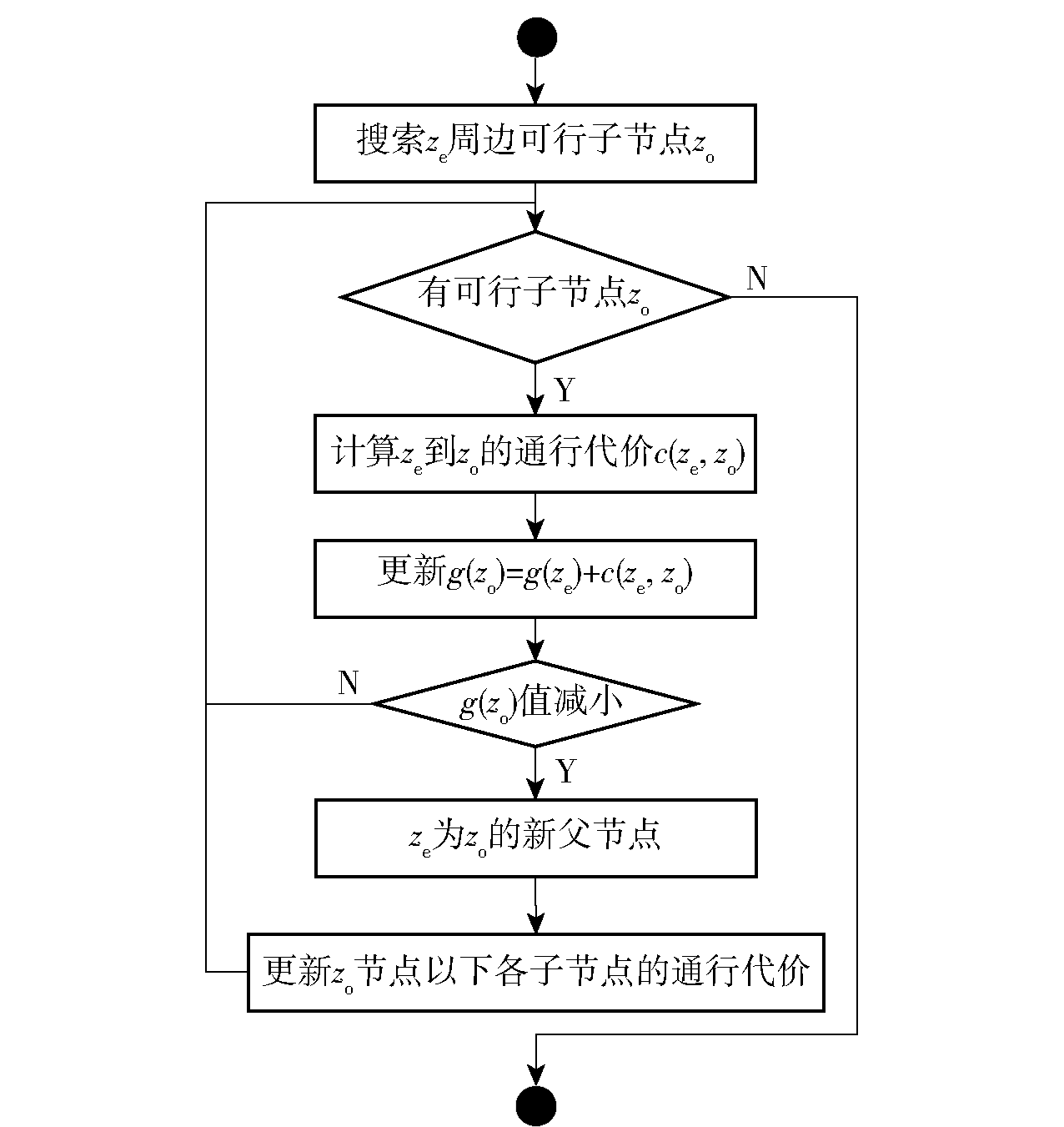
Fig.11 Flowchart of RRT child node reconstruction
| 车辆参数 | 数值 |
|---|---|
| 外形尺寸(长×宽×高)/mm | 4955×2137×1920 |
| 轴距/mm | 3300 |
| 整车质量/kg | 3200 |
| 行驶车速/(km·h-1) | 30 |
Table 1 Path planning simulation parameters
| 车辆参数 | 数值 |
|---|---|
| 外形尺寸(长×宽×高)/mm | 4955×2137×1920 |
| 轴距/mm | 3300 |
| 整车质量/kg | 3200 |
| 行驶车速/(km·h-1) | 30 |

Fig.12 Simulation experiment scenarios

Fig.13 Scenario simulation experiment process
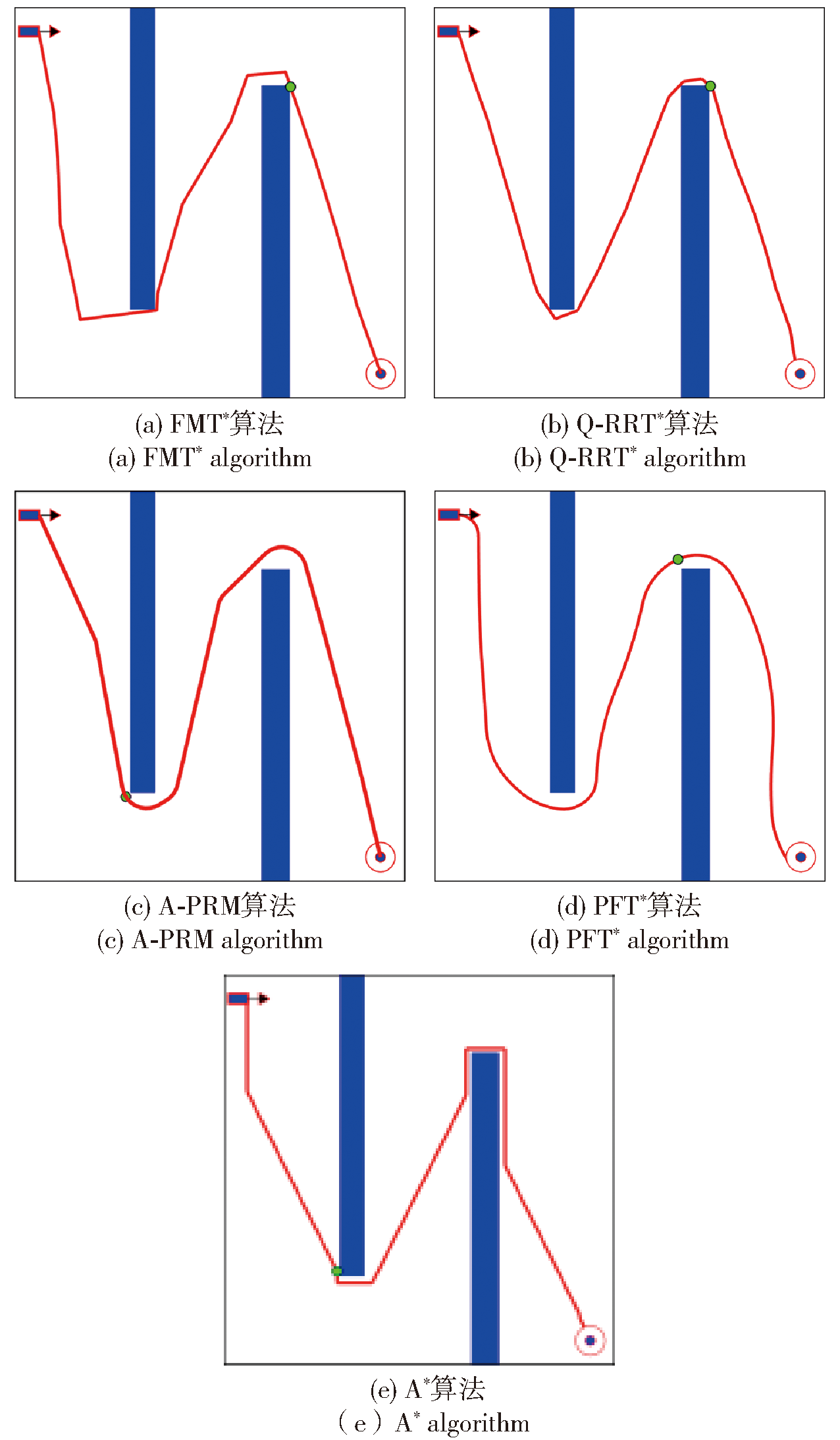
Fig.14 Comparison of simulation experimental trajectories (Scenario1)
| 算法 | 距离/m | 势场值 | 最近障碍距离/m | 通行代价 |
|---|---|---|---|---|
| FMT* | 1999 | 161 | 2.17 | 2160 |
| Q-RRT* | 1876 | 265 | 1.62 | 2141 |
| A-PRM | 2102 | 60 | 12.22 | 2162 |
| A* | 1946 | 415 | 5.0 | 2361 |
| PFT* | 2018 | 33 | 22.80 | 2051 |
Table 2 Comparisonof simulated results (Scenario 1)
| 算法 | 距离/m | 势场值 | 最近障碍距离/m | 通行代价 |
|---|---|---|---|---|
| FMT* | 1999 | 161 | 2.17 | 2160 |
| Q-RRT* | 1876 | 265 | 1.62 | 2141 |
| A-PRM | 2102 | 60 | 12.22 | 2162 |
| A* | 1946 | 415 | 5.0 | 2361 |
| PFT* | 2018 | 33 | 22.80 | 2051 |
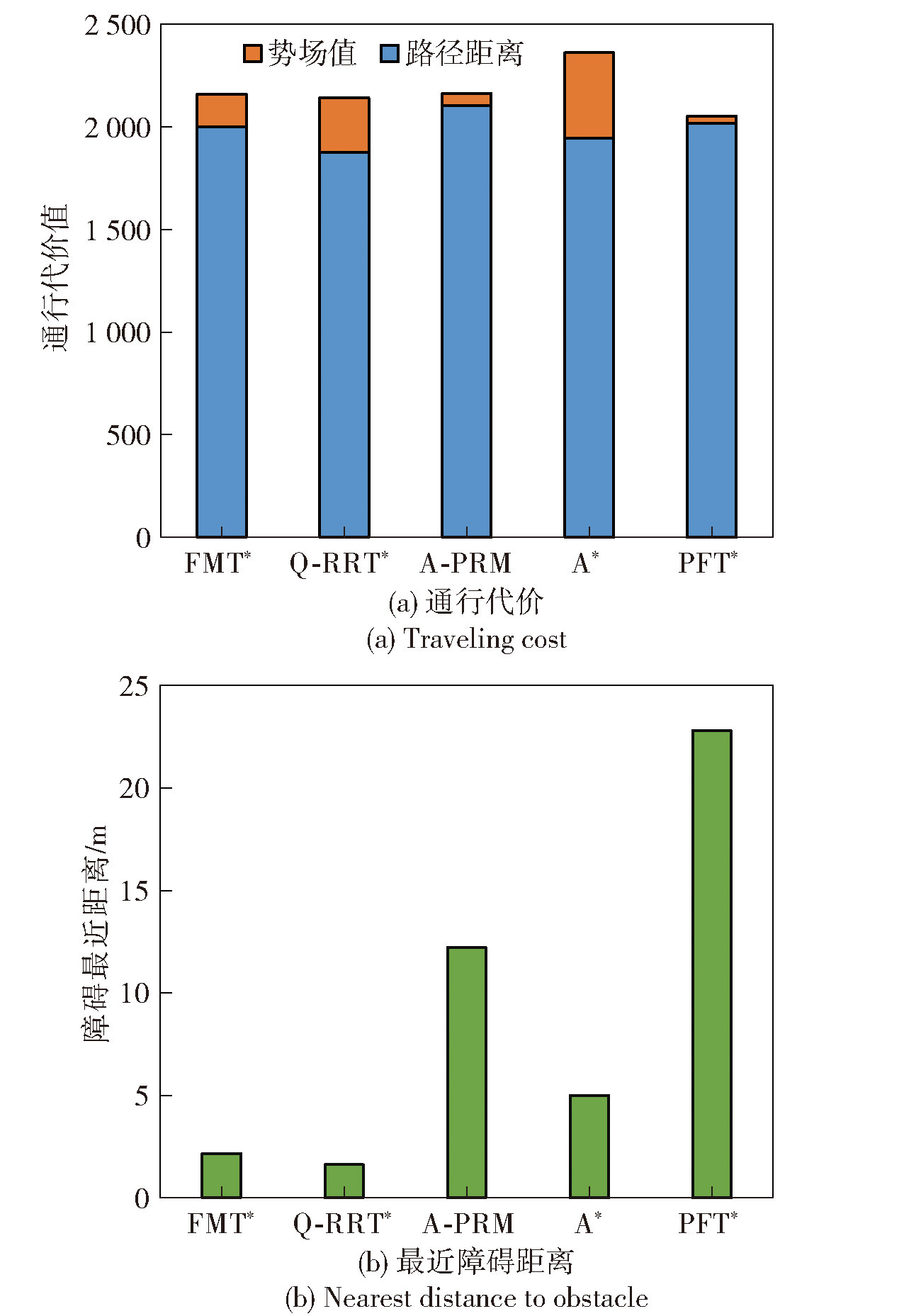
Fig.15 Comparison of simulated trajectories comparison (Scenario 1)
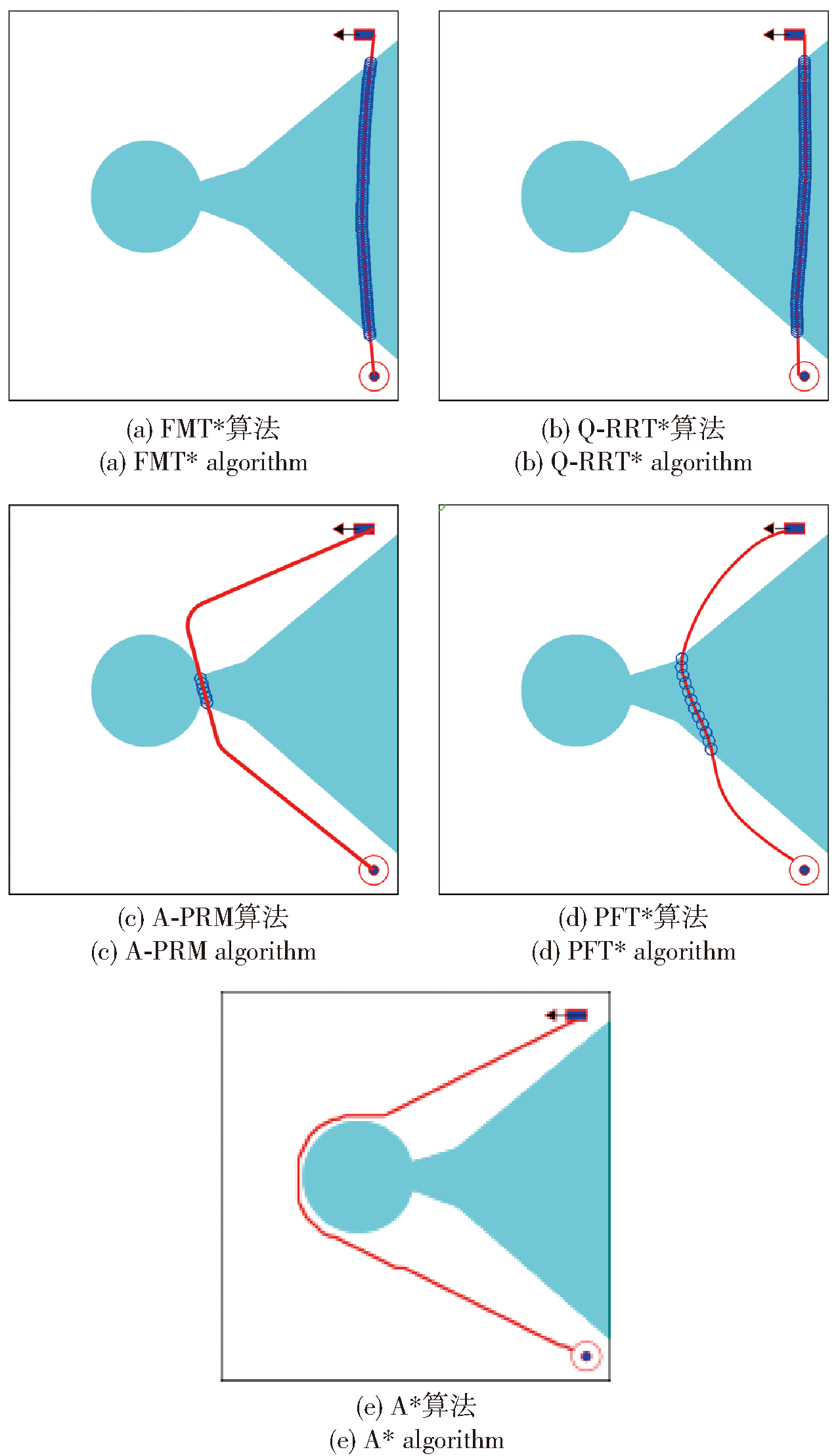
Fig.16 Comparison of simulated trajectories (Scenarios 2)
| 算法 | 距离/m | 势场值 | 越野距离/m | 通行代价 |
|---|---|---|---|---|
| FMT* | 702 | 503 | 560 | 1 205 |
| Q-RRT* | 683 | 498 | 565 | 1 181 |
| A-PRM | 1 160 | 98 | 60 | 1 258 |
| A* | 1 457 | 267 | 0 | 1 724 |
| PFT* | 908 | 240 | 308 | 1 148 |
Table 3 Comparison of simulated results (Scenario 2)
| 算法 | 距离/m | 势场值 | 越野距离/m | 通行代价 |
|---|---|---|---|---|
| FMT* | 702 | 503 | 560 | 1 205 |
| Q-RRT* | 683 | 498 | 565 | 1 181 |
| A-PRM | 1 160 | 98 | 60 | 1 258 |
| A* | 1 457 | 267 | 0 | 1 724 |
| PFT* | 908 | 240 | 308 | 1 148 |
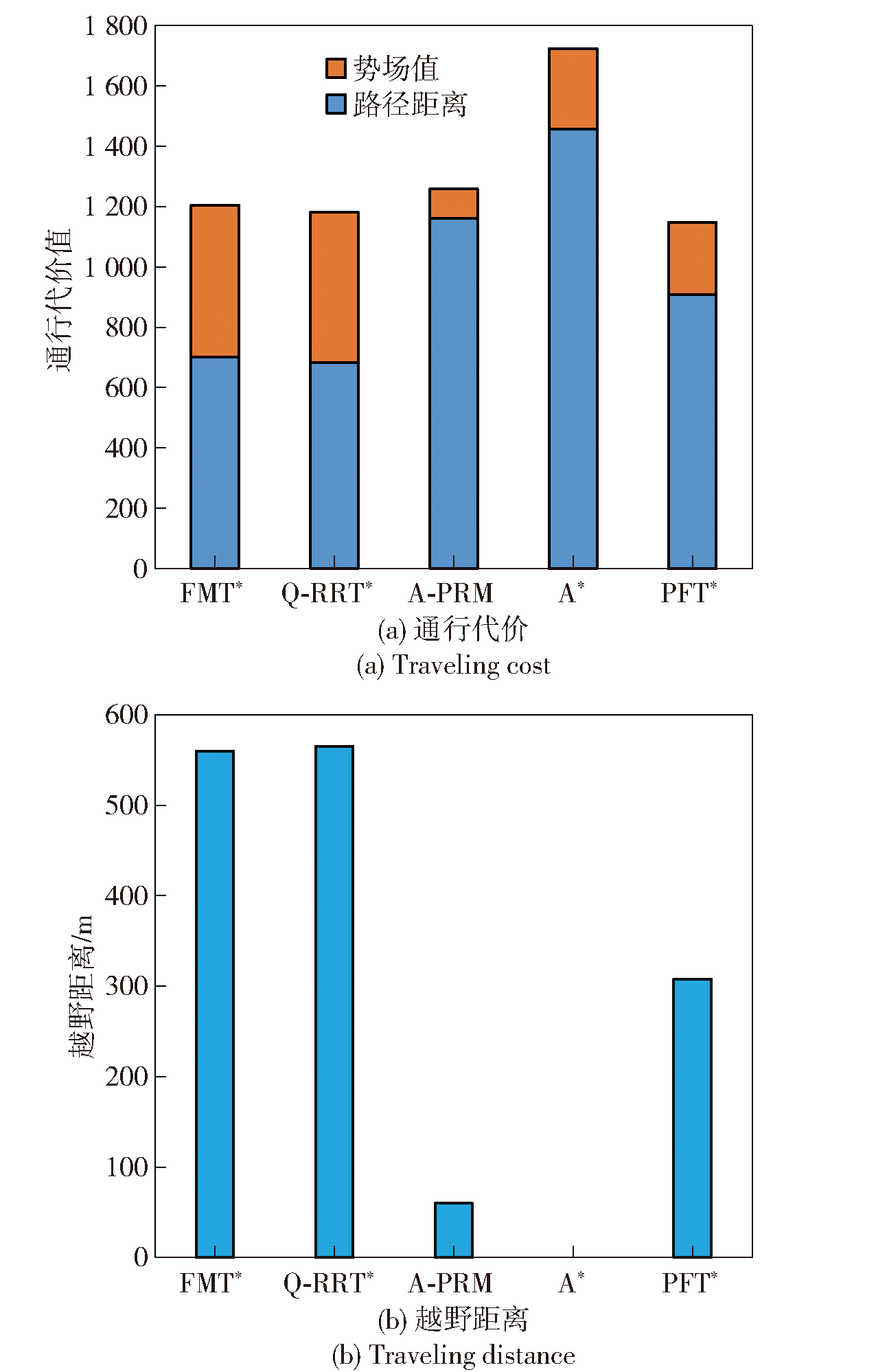
Fig.17 Comparison of simulated trajectories (Scenario 2)

Fig.18 Comparison of simulated trajectories (Scenario 3)
| 算法 | 距离/m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 通行 代价 |
|---|---|---|---|---|---|
| FMT* | 1417 | 971 | 2.95 | 235 | 2389 |
| Q-RRT* | 1341 | 676 | 1.82 | 200 | 2017 |
| A-PRM | 1628 | 318 | 17.04 | 70 | 1946 |
| A* | 1616 | 326 | 13.41 | 0 | 1942 |
| PFT* | 1629 | 109 | 23.30 | 42 | 1738 |
Table 4 Comparison of simulated results (Scenario 3)
| 算法 | 距离/m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 通行 代价 |
|---|---|---|---|---|---|
| FMT* | 1417 | 971 | 2.95 | 235 | 2389 |
| Q-RRT* | 1341 | 676 | 1.82 | 200 | 2017 |
| A-PRM | 1628 | 318 | 17.04 | 70 | 1946 |
| A* | 1616 | 326 | 13.41 | 0 | 1942 |
| PFT* | 1629 | 109 | 23.30 | 42 | 1738 |
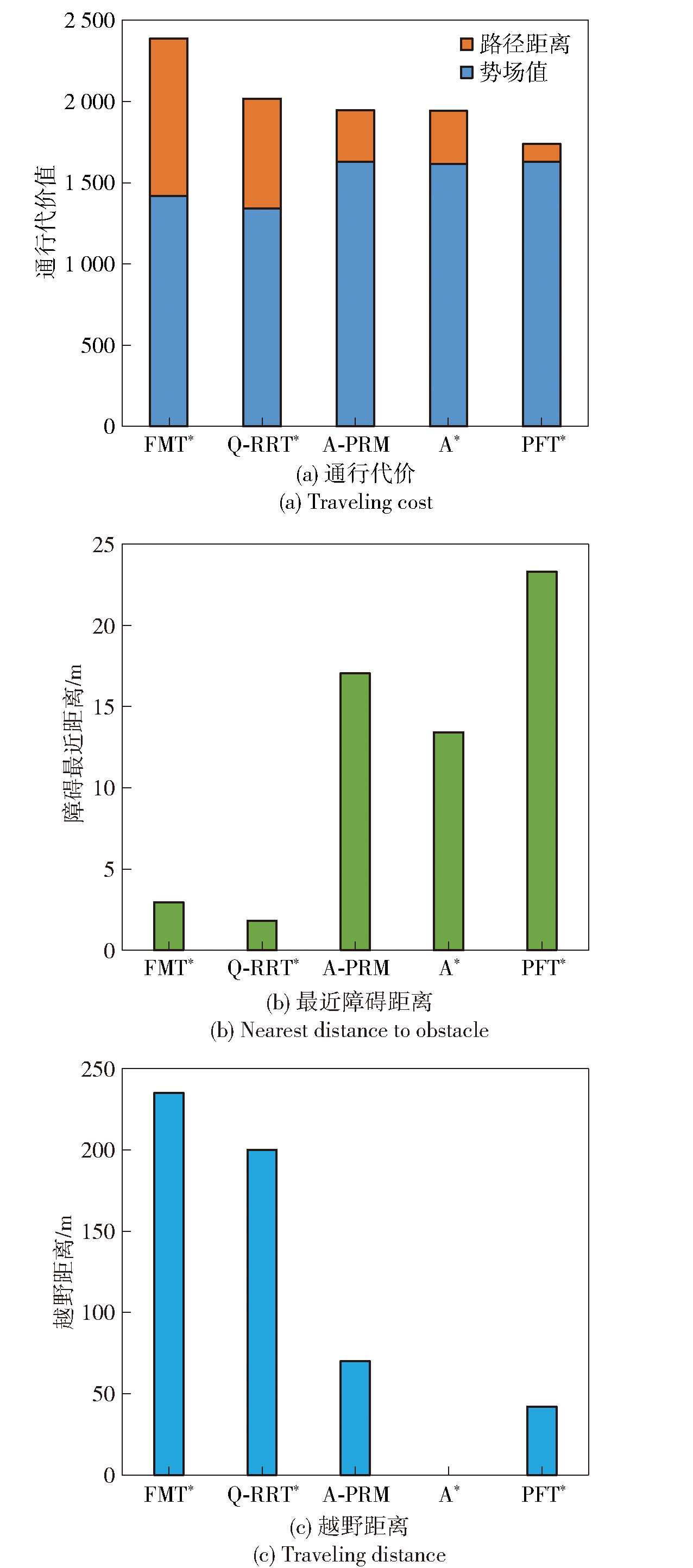
Fig.19 Comparison of simulated trajectories (Scenario 3)

Fig.20 Comparison of simulated trajectories (Scenario 4)
| 算法 | 距离/ m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 最近威胁 距离/m | 通行 代价 |
|---|---|---|---|---|---|---|
| FMT* | 1138 | 230 | 3.41 | 0 | 105 | 1368 |
| Q-RRT* | 1046 | 158 | 1.76 | 0 | 150 | 1204 |
| A-PRM | 1147 | 326 | 1.94 | 98 | 139 | 1473 |
| A* | 1102 | 126 | 13.44 | 0 | 123 | 1228 |
| PFT* | 1128 | 41 | 18.21 | 0 | 110 | 1169 |
Table 5 Comparison of simulated results (Scenario 4)
| 算法 | 距离/ m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 最近威胁 距离/m | 通行 代价 |
|---|---|---|---|---|---|---|
| FMT* | 1138 | 230 | 3.41 | 0 | 105 | 1368 |
| Q-RRT* | 1046 | 158 | 1.76 | 0 | 150 | 1204 |
| A-PRM | 1147 | 326 | 1.94 | 98 | 139 | 1473 |
| A* | 1102 | 126 | 13.44 | 0 | 123 | 1228 |
| PFT* | 1128 | 41 | 18.21 | 0 | 110 | 1169 |
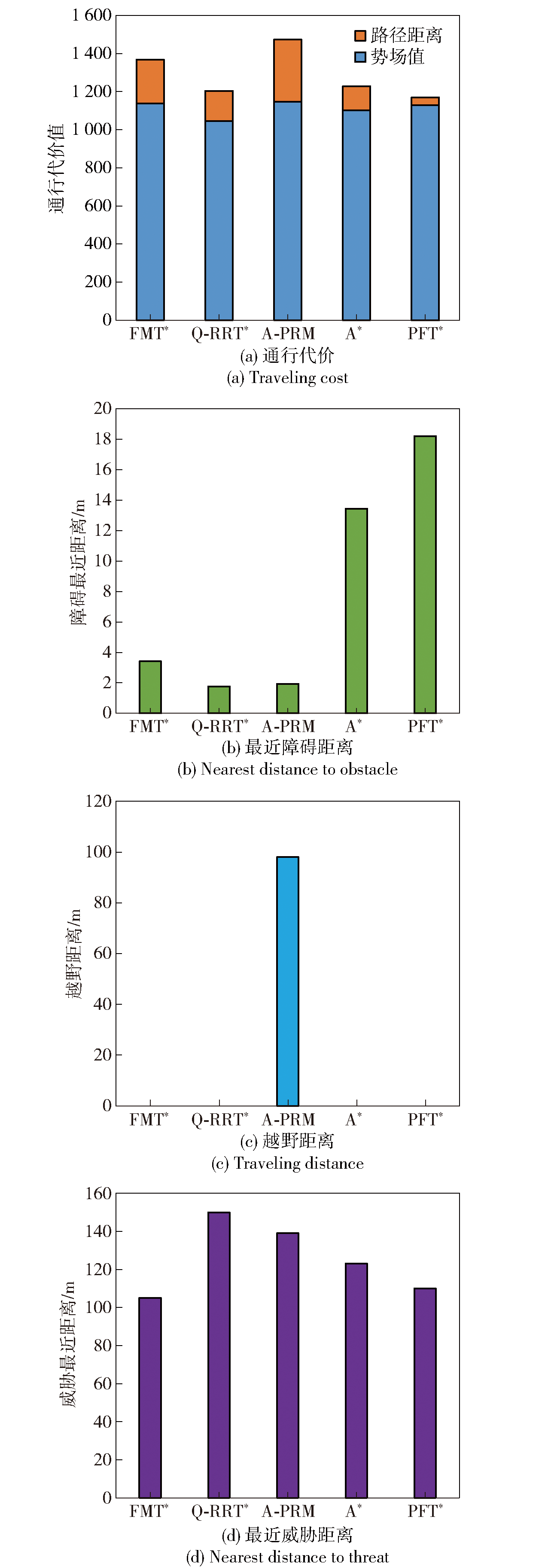
Fig.21 Comparison of simulated trajectories (Scenario 3)

Fig.22 Comparison of simulated trajectories (Scenario 5)
| 算法 | 距离/m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 通行 代价 |
|---|---|---|---|---|---|
| FMT* | 1 302 | 668 | 3.30 | 80 | 1 970 |
| Q-RRT* | 1 244 | 530 | 1.96 | 0 | 1 774 |
| A-PRM | 1 276 | 236 | 11.11 | 0 | 1 512 |
| A* | 1 262 | 186 | 5.01 | 0 | 1 448 |
| PFT* | 1 338 | 97 | 18.12 | 0 | 1 435 |
Table 6 Comparison of simulated results (Scenario 5)
| 算法 | 距离/m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 通行 代价 |
|---|---|---|---|---|---|
| FMT* | 1 302 | 668 | 3.30 | 80 | 1 970 |
| Q-RRT* | 1 244 | 530 | 1.96 | 0 | 1 774 |
| A-PRM | 1 276 | 236 | 11.11 | 0 | 1 512 |
| A* | 1 262 | 186 | 5.01 | 0 | 1 448 |
| PFT* | 1 338 | 97 | 18.12 | 0 | 1 435 |
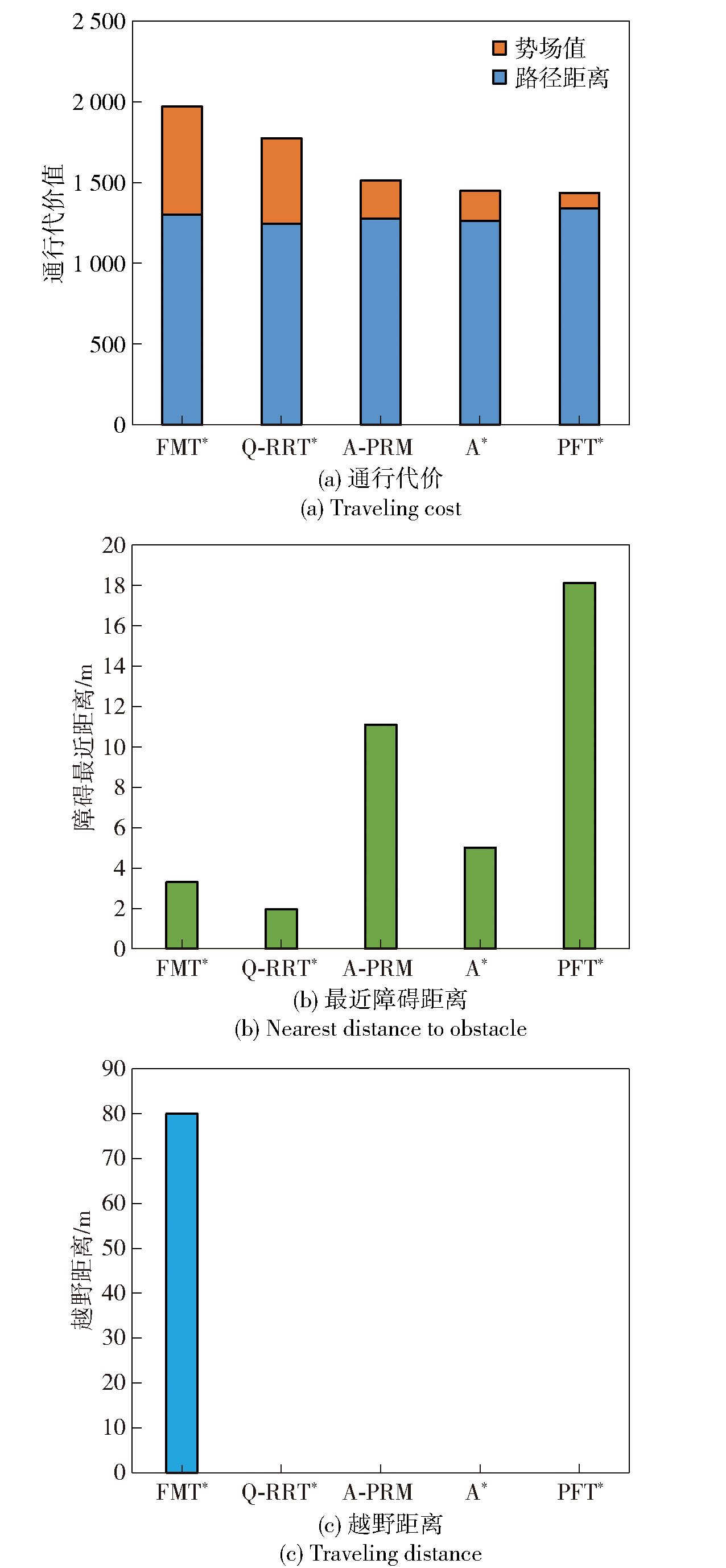
Fig.23 Comparison of simulated trajectories (Scenario 5)
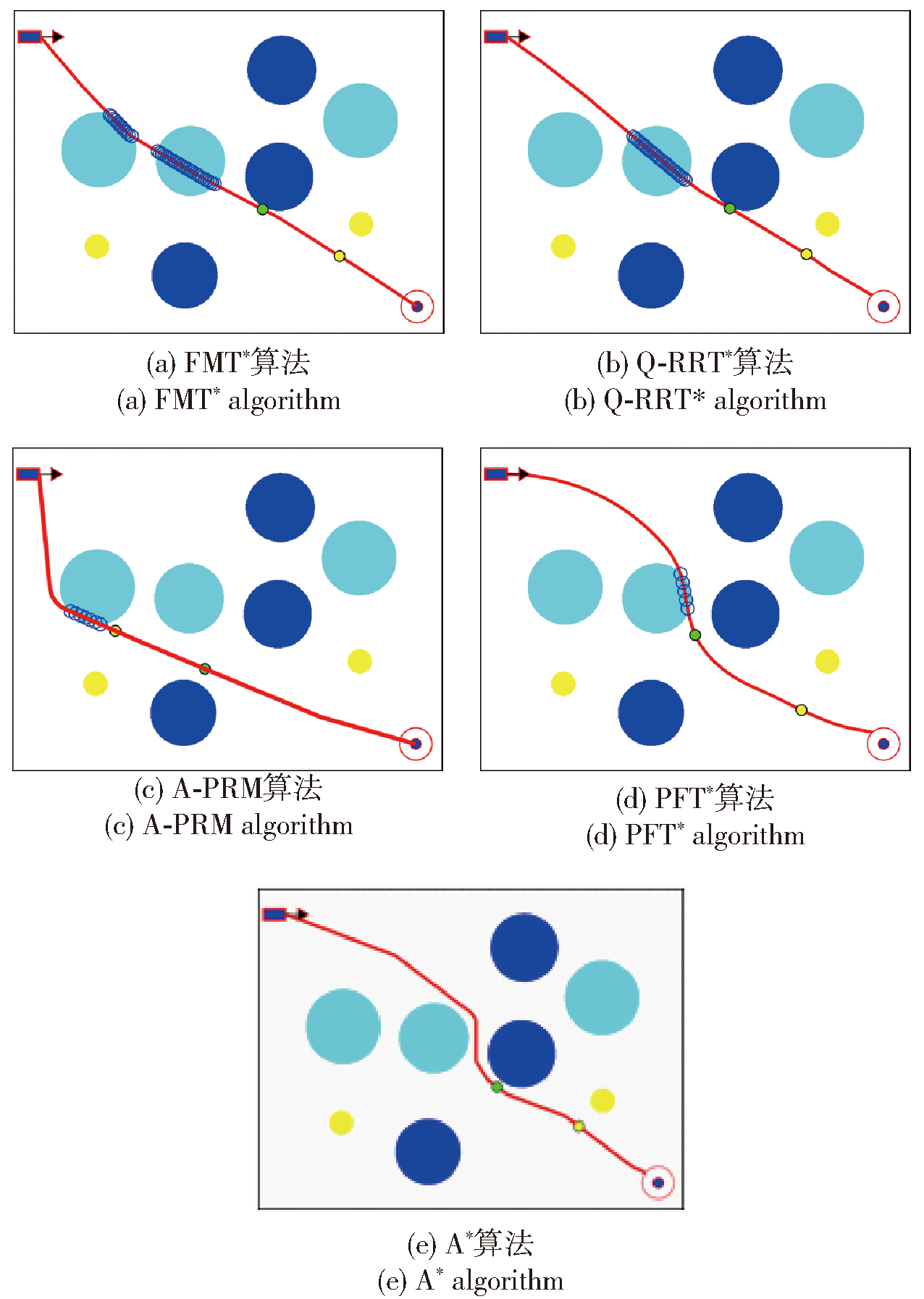
Fig.24 Comparison of simulated trajectories (Scenario 6)
| 算法 | 距离/m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 最近威胁 距离/m | 通行 代价 |
|---|---|---|---|---|---|---|
| FMT* | 868 | 514 | 4.89 | 185 | 49 | 1382 |
| Q-RRT* | 838 | 438 | 9.89 | 125 | 50 | 1276 |
| A-PRM | 967 | 232 | 29.31 | 70 | 82 | 1199 |
| A* | 915 | 490 | 13 | 0 | 0.45 | 1405 |
| PFT* | 914 | 132 | 34.15 | 60 | 89 | 1046 |
Table 7 Comparison of simulated results (Scenario 6)
| 算法 | 距离/m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 最近威胁 距离/m | 通行 代价 |
|---|---|---|---|---|---|---|
| FMT* | 868 | 514 | 4.89 | 185 | 49 | 1382 |
| Q-RRT* | 838 | 438 | 9.89 | 125 | 50 | 1276 |
| A-PRM | 967 | 232 | 29.31 | 70 | 82 | 1199 |
| A* | 915 | 490 | 13 | 0 | 0.45 | 1405 |
| PFT* | 914 | 132 | 34.15 | 60 | 89 | 1046 |
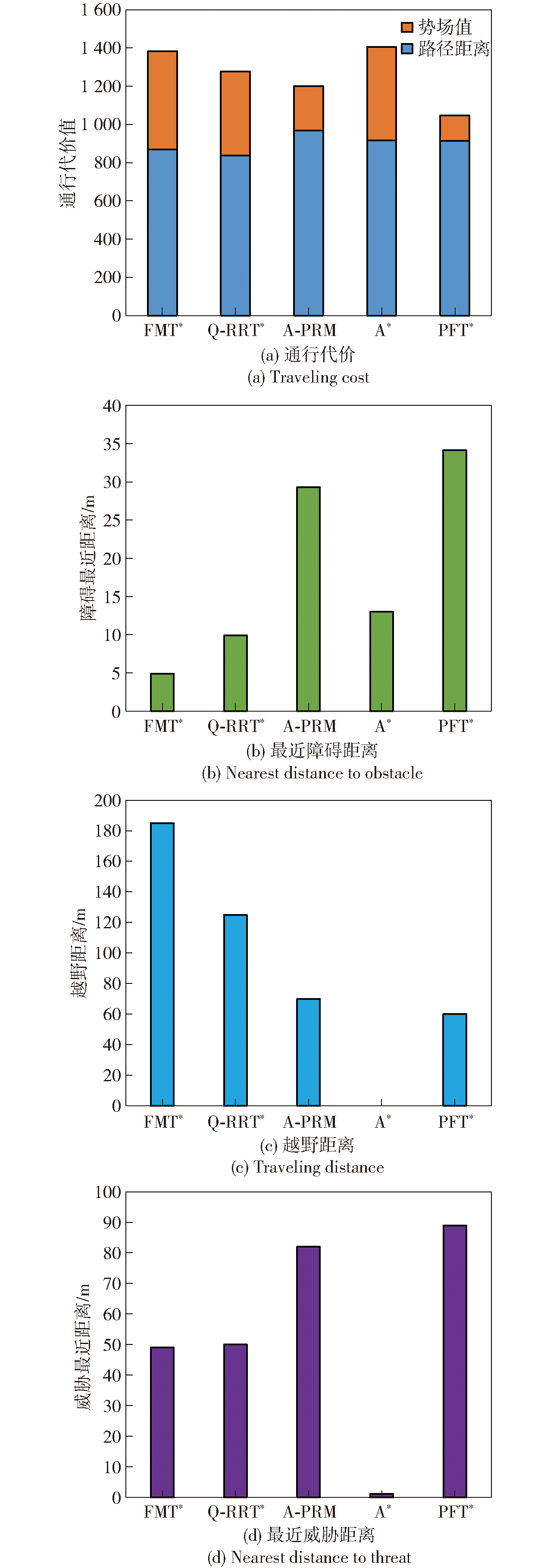
Fig.25 Comparison of simulated trajectories(Scenario 6)
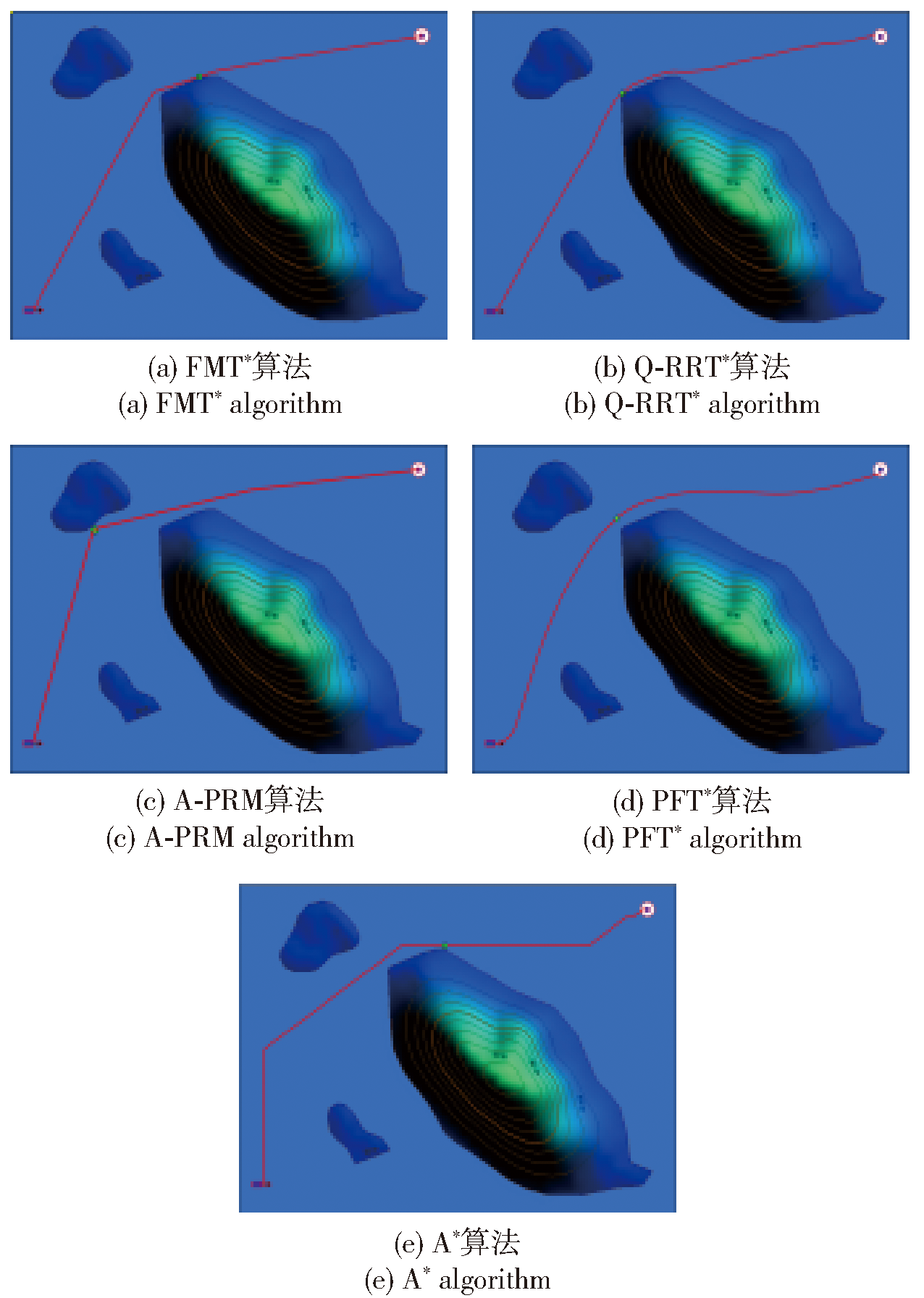
Fig.26 Trajectory comparison in elevation map (Scenario7)
| 算法 | 距离/m | 势场值 | 最近障碍距离/m | 通行代价 |
|---|---|---|---|---|
| FMT* | 2 218 | 410 | 2.9 | 2 628 |
| Q-RRT* | 2 188 | 144 | 3.3 | 2 332 |
| A-PRM | 2 359 | 180 | 16.1 | 2 539 |
| A* | 2 403 | 144 | 13.4 | 2 547 |
| PFT* | 2 274 | 0 | 44.2 | 2 274 |
Table 8 Planning data comparison in elevation map (Scenario 7)
| 算法 | 距离/m | 势场值 | 最近障碍距离/m | 通行代价 |
|---|---|---|---|---|
| FMT* | 2 218 | 410 | 2.9 | 2 628 |
| Q-RRT* | 2 188 | 144 | 3.3 | 2 332 |
| A-PRM | 2 359 | 180 | 16.1 | 2 539 |
| A* | 2 403 | 144 | 13.4 | 2 547 |
| PFT* | 2 274 | 0 | 44.2 | 2 274 |
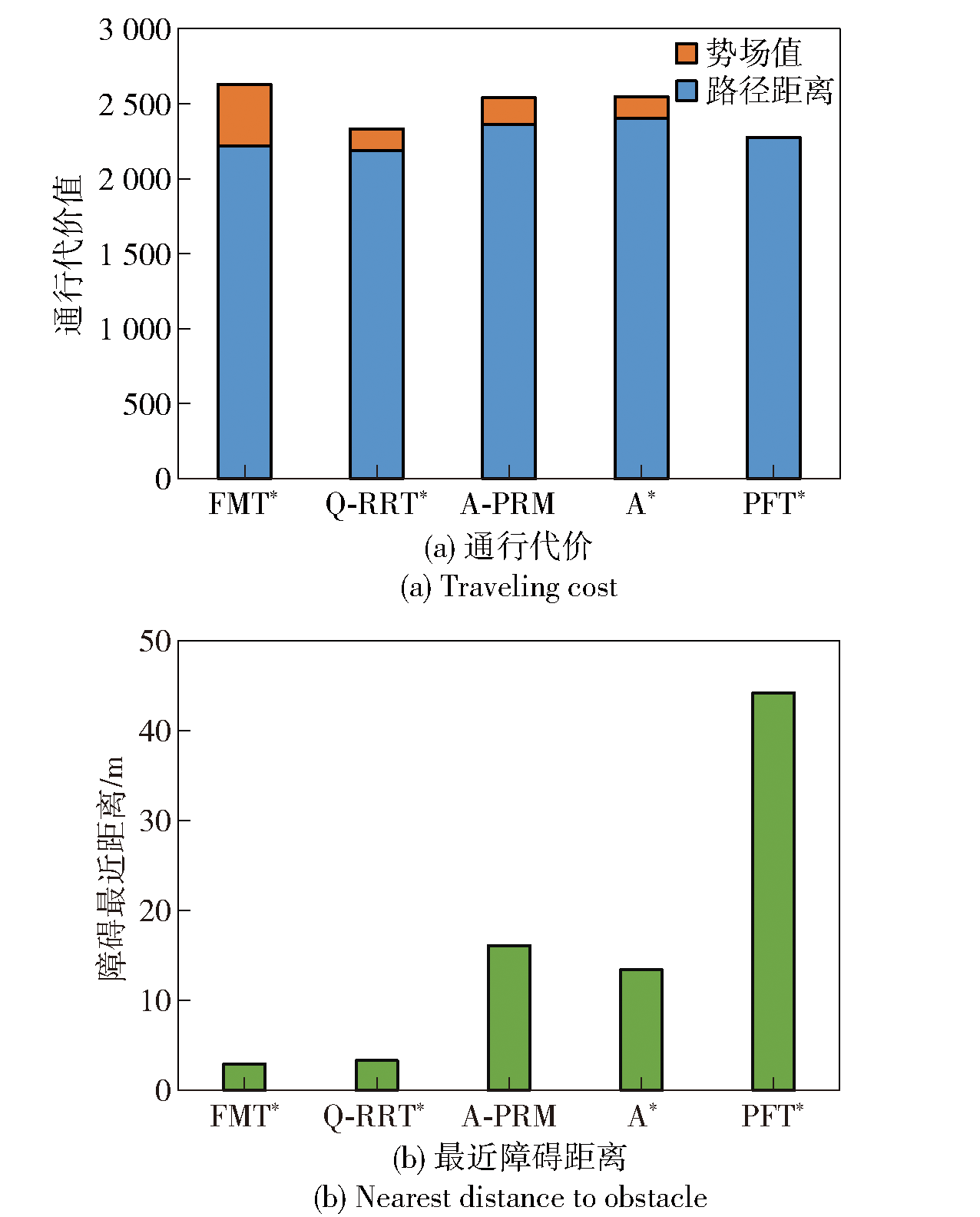
Fig.27 Planning data comparison in elevation map(Scenario 7)
| [1] |
陈慧岩, 张玉. 军用地面无人机动平台技术发展综述[J]. 兵工学报, 2014, 35(10):1696-1706.
doi: 10.3969/j.issn.1000-1093.2014.10.026 |
|
|
|
| [2] |
李立, 徐志刚, 赵祥模, 等. 智能网联汽车运动规划方法研究综述[J]. 中国公路学报, 2019, 32(6):20-33.
doi: 10.19721/j.cnki.1001-7372.2019.06.002 |
|
doi: 10.19721/j.cnki.1001-7372.2019.06.002 |
|
| [3] |
采国顺, 刘昊吉, 冯吉伟, 等. 智能汽车的运动规划与控制研究综述[J]. 汽车安全与节能学报, 2021, 12(3): 279-297.
|
|
|
|
| [4] |
孔国杰, 冯时, 于会龙, 等. 无人集群系统协同运动规划技术综述[J]. 兵工学报, 2023, 44(1):11-26.
doi: 10.12382/bgxb.2022.0930 |
|
doi: 10.12382/bgxb.2022.0930 |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
田洪清, 王建强, 黄荷叶, 等. 越野环境下基于势能场模型的智能车概率图路径规划方法[J]. 兵工学报, 2021, 42(7):1496-1505.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
周维, 过学迅, 裴晓飞, 等. 基于RRT与MPC的智能车辆路径规划与跟踪控制研究[J]. 汽车工程, 2020, 42(9): 1151-1158.
|
|
|
|
| [18] |
冯来春, 梁华为, 杜明博, 等. 基于A*引导域的RRT智能车辆路径规划算法[J]. 计算机系统应用, 2017, 26(8):127-133.
|
|
|
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
张立彬, 林后凯, 谭大鹏. 基于栅格空间的自适应GB_RRT*机械臂路径规划[J]. 计算机集成制造系统, 2022, 28(6):28-37.
|
|
|
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
潘作栋, 周悦, 郭威, 等. 基于CB-RRT*算法的滩涂履带车路径规划[J]. 兵工学报, 2023, 2023, 21(4):1496-1505.
|
|
|
|
| [32] |
|
| [33] |
|
| [34] |
李爱娟, 李舜酩, 李殿荣, 等. 智能车运动轨迹规划中的关键技术研究现状[J]. 机械科学与技术, 2013, 32(7):1022-1026.
|
|
|
|
| [35] |
田洪清, 丁峰, 郑讯佳, 等. 基于势能场虚拟力的智能网联车辆运动规划[J]. 汽车工程, 2021, 43(4):518-526.
|
|
|
| [1] | JI Peng, GUO Minghao. Local Path Planning for Unmanned Ground Vehicles Based on Improved Artificial Potential Field Method in Frenet Coordinate System [J]. Acta Armamentarii, 2024, 45(7): 2097-2109. |
| [2] | WANG Xiaolong, CHEN Yang, HU Mian, LI Xudong. Robot Path Planning for Persistent Monitoring Based on Improved Deep Q Networks [J]. Acta Armamentarii, 2024, 45(6): 1813-1823. |
| [3] | PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [4] | LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare [J]. Acta Armamentarii, 2023, 44(S2): 146-156. |
| [5] | LI Song, MA Zhuangzhuang, ZHANG Yunlin, SHAO Jinliang. Multi-agent Coverage Path Planning Based on Security Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(S2): 101-113. |
| [6] | LI Zhaodong, ZHAO Xijun, YANG Tingting, QI Xiaolong, ZHOU Changyi, ZHANG Liming. Key Technologies and Application Prospects for High-definition Map in Off-road Environments [J]. Acta Armamentarii, 2023, 44(S2): 1-11. |
| [7] | YIN Yiyi, WANG Xiaofang, ZHOU Jian. Q-Learning-based Multi-UAV Cooperative Path Planning Method [J]. Acta Armamentarii, 2023, 44(2): 484-495. |
| [8] | FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy [J]. Acta Armamentarii, 2023, 44(11): 3394-3406. |
| [9] | WANG Kang, SI Peng, CHEN Li, LI Zhongxin, WU Zhilin. 3D Path Planning of Unmanned Aerial Vehicle Based on Enhanced Sand Cat Swarm Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(11): 3382-3393. |
| [10] | TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation [J]. Acta Armamentarii, 2023, 44(11): 3320-3332. |
| [11] | JIANG Yan, DING Yuyan, ZHANG Xinglong, XU Xin. A Human-machine Collaborative Control Algorithm for Intelligent Vehicles Based on Model Prediction and Policy Learning [J]. Acta Armamentarii, 2023, 44(11): 3465-3477. |
| [12] | ZHANG Lei, FANG Yang-wang, CHAI Dong, YONG Xiao-ju. Cruise Missile Path Planning Based on Improved Quantum Evolutionary Algorithm [J]. Acta Armamentarii, 2014, 35(11): 1820-1827. |
| [13] | FU Yang-guang, ZHOU Cheng-ping2, HU Han-ping2. Research on Differential Evolution Algorithm for Path Planning for Unmanned Aerial Vehicle inOcean Environment [J]. Acta Armamentarii, 2012, 33(3): 295-300. |
| [14] | JIANG Yan-hua, XIONG Guang-ming, JIANG Yan, GONG Jian-wei, CHEN Hui-yan. A Review of Visual Odometry for Intelligent Vehicles [J]. Acta Armamentarii, 2012, 33(2): 214-220. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||