
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (2): 417-428.doi: 10.12382/bgxb.2022.0624
Previous Articles Next Articles
ZHU Qixin1,2,3,*( ), WANG Jiaqi1,2, ZHU Yonghong4
), WANG Jiaqi1,2, ZHU Yonghong4
Received:2022-04-21
Online:2024-02-29
Contact:
ZHU Qixin
CLC Number:
ZHU Qixin, WANG Jiaqi, ZHU Yonghong. Sliding Mode Feedforward Control and Disturbance Suppression for PMSM Based on Full Parameters Adaptive Smith Predictor Compensation[J]. Acta Armamentarii, 2024, 45(2): 417-428.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Structure block diagram of PMSM simplified mathematical model

Fig.2 Schematic diagram of ideal Smith predictive compensation structure
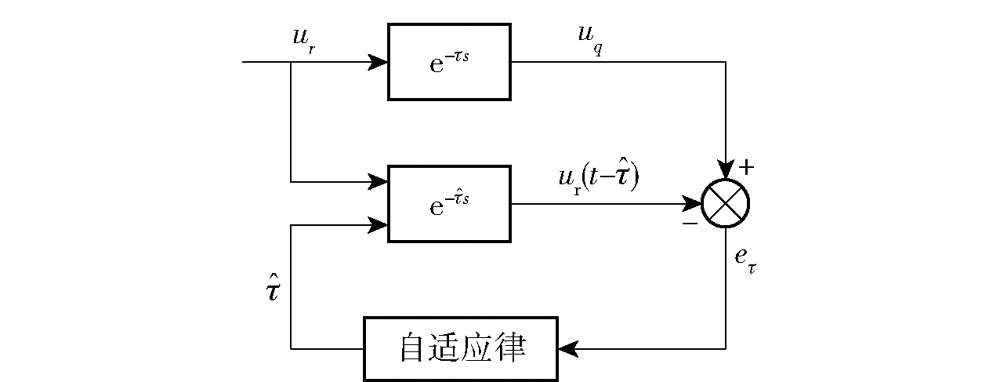
Fig.3 Schematic diagram of delay time estimation structure

Fig.4 Delay time estimation curve

Fig.5 Structural schematic diagram of model parameter estimation of controlled object

Fig.6 Schematic diagram of full parameters adaptive Smith predictive compensation structure

Fig.7 Comparison between predicted position advanced value and actual position output

Fig.8 Comparison of predicted effects of position advanced values before and after compensation

Fig.9 Comparison of predicted errors of position advanced values after multiple compensation

Fig.10 Schematic diagram of FPASPC+SMFC structure
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| L/H | 0.01869 | R/Ω | 4.78 |
| J/(kg·m2) | 0.57 | B/(N·s·m-1) | 0.0065 |
| Kt/(N·m·A-1) | 1.6 | Ke(V·s·m-1) | 1.6 |
| τ/s | 0.02 | Kp | 30 |
| kτ | 500 | kω | 100 |
| μ1 | 100 | μ2 | 350 |
| c | 5 | k | 5 |
| d0方差 | 50 | D | 50 |
Table 1 Model and controller parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| L/H | 0.01869 | R/Ω | 4.78 |
| J/(kg·m2) | 0.57 | B/(N·s·m-1) | 0.0065 |
| Kt/(N·m·A-1) | 1.6 | Ke(V·s·m-1) | 1.6 |
| τ/s | 0.02 | Kp | 30 |
| kτ | 500 | kω | 100 |
| μ1 | 100 | μ2 | 350 |
| c | 5 | k | 5 |
| d0方差 | 50 | D | 50 |

Fig.11 Estimated effect diagram of model parameter K

Fig.12 Estimated effect diagram of model parameter α
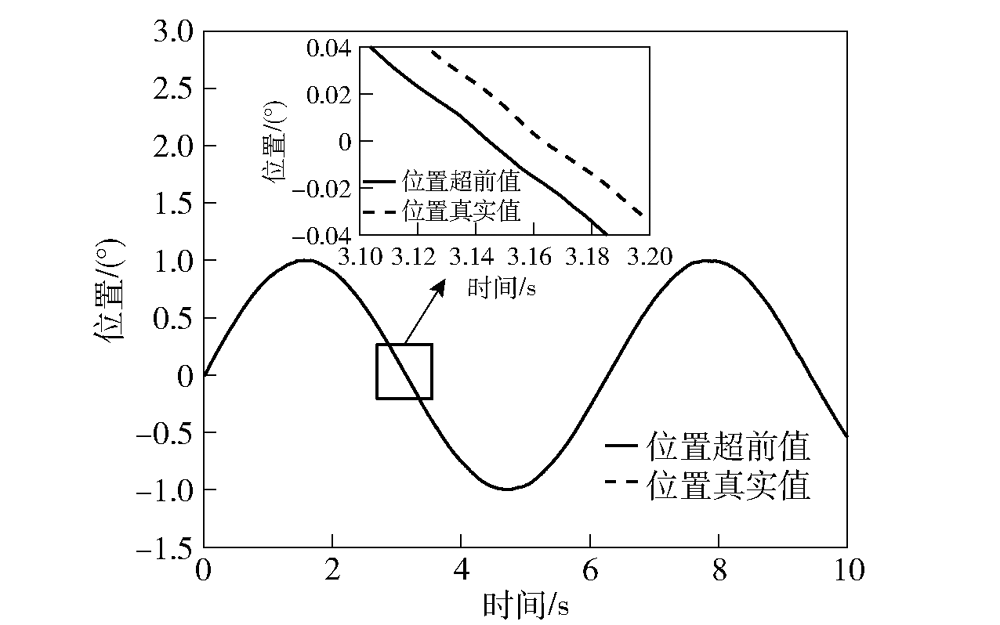
Fig.13 Predicted effect diagram of position advanced value

Fig.14 Comparison of position responses of FPASPC+SMFC and TSPC

Fig.15 Fig.15 Comparison of position response errors of FPASPC+SMFC and TSPC

Fig.16 Comparison of position responses of FPASPC+SMFC and TSPC+DFRA
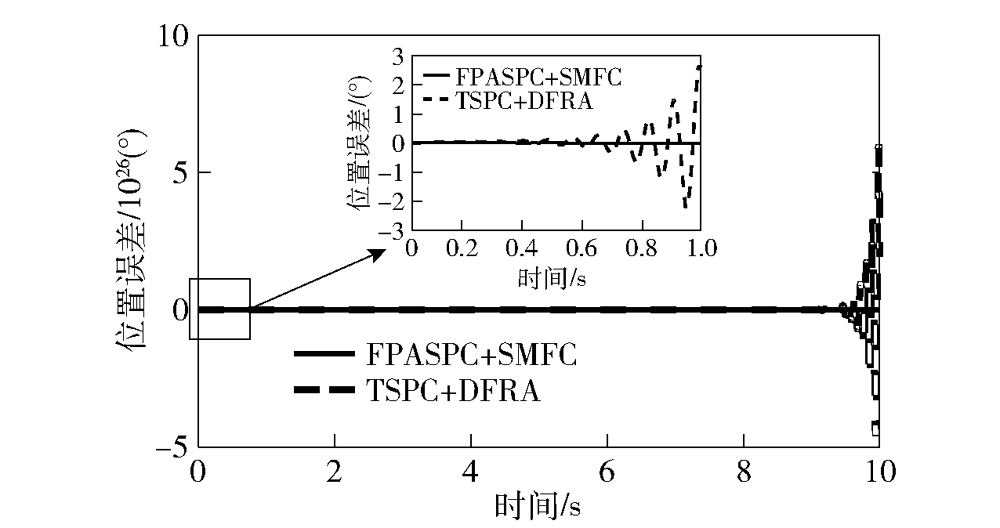
Fig.17 Comparison of position response errors of FPASPC+SMFC and TSPC+DFRA

Fig.18 Comparison of position responses of FPASPC+SMFC and TSPC+MRAC

Fig.19 Comparison of position response errors of FPASPC+SMFC and TSPC+MRAC

Fig.20 Comparison of position responses of FPASPC+SMFC and ISPC+ADC

Fig.21 Comparison of position response errors of FPASPC+SMFC and ISPC+ADC

Fig.22 Comparison of position responses of FPASPC+SMFC and ASPTDCC

Fig.23 Comparison of position response error between FPASPC+SMFC and ASPTDCC
| [1] |
李冬辉, 高峰. 基于扰动观测器的压缩式制冷系统改进Smith预估解耦控制[J]. 上海交通大学学报, 2019, 53(5):593-599.
doi: 10.16183/j.cnki.jsjtu.2019.05.012 |
|
|
|
| [2] |
doi: 10.1109/JSEN.2018.2835147 URL |
| [3] |
doi: 10.1016/j.actaastro.2018.04.010 URL |
| [4] |
doi: 10.1007/s12555-018-0612-x |
| [5] |
张腾飞, 方星, 刘飞, 等. 基于改进Smith预估补偿的制冷系统抗干扰控制[J]. 控制工程, 2020, 27(7):1204-1209.
|
|
|
|
| [6] |
doi: 10.1177/0142331219862978 URL |
| [7] |
|
| [8] |
|
| [9] |
doi: 10.1016/j.jprocont.2019.03.003 URL |
| [10] |
潘子昊, 卜飞飞, 轩富强, 等. 基于Smith预估器的永磁电机高动态响应电流环控制策略[J]. 电工技术学报, 2020, 35(9):1921-1929.
|
|
|
|
| [11] |
doi: 10.1177/0142331220947568 URL |
| [12] |
doi: 10.1016/j.apm.2020.07.026 URL |
| [13] |
doi: 10.1109/TVT.2018.2886467 URL |
| [14] |
doi: 10.1108/WJE-11-2018-0402 URL |
| [15] |
doi: 10.1016/j.isatra.2020.08.018 pmid: 32829887 |
| [16] |
doi: 10.1016/j.autcon.2019.102987 URL |
| [17] |
doi: 10.1016/j.isatra.2020.10.007 pmid: 33039166 |
| [18] |
doi: 10.1016/j.ejcon.2020.01.005 URL |
| [19] |
|
| [20] |
赵志诚, 徐娜, 张井岗. 多变量时滞非方系统的分数阶Smith预估控制[J]. 控制与决策, 2019, 34(6):1331-1337.
|
|
|
|
| [21] |
doi: 10.1007/s42452-020-2034-7 |
| [22] |
尹成强, 高洁, 孙群, 等. 基于改进Smith预估控制结构的二自由度PID控制[J]. 自动化学报, 2020, 46(6):1274-1282.
|
|
|
|
| [23] |
张皓, 高瑜翔. 前馈反馈Smith预估模糊PID组合温度控制算法[J]. 中国测试, 2020, 46(11):132-138,168.
|
|
|
|
| [24] |
doi: 10.1016/j.aeue.2017.05.014 URL |
| [25] |
doi: 10.1109/Access.6287639 URL |
| [26] |
doi: S0019-0578(19)30482-3 pmid: 31727323 |
| [27] |
doi: 10.1016/j.jfranklin.2018.07.012 URL |
| [28] |
郑仰东. 采用Smith预估器模型的时滞系统自适应控制[J]. 控制理论与应用, 2021, 38(3):416-424.
|
|
|
|
| [29] |
寇发荣, 李冬, 许家楠, 等. EHA半主动悬架自适应Smith 预估时变时滞补偿控制[J]. 西安科技大学学报, 2018, 38(6):1005-1012.
|
|
|
|
| [30] |
|
| [1] | TU Qun-zhang, LIN Jia-kun, ZENG Fan-qi, ZOU Shi-chao, LU Ying. Research on Flux-weakening Control Strategy with Overmodulation of PMSM Control System [J]. Acta Armamentarii, 2016, 37(5): 953-960. |
| [2] | CHEN Fu-hong1, MA Da-wei1, YANG Bi-wu2, ZHU Zhong-ling1. Global Sliding Mode Control for Rocket Launcher AC Servo System [J]. Acta Armamentarii, 2012, 33(6): 641-646. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||