
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (1): 166-183.doi: 10.12382/bgxb.2023.0533
Previous Articles Next Articles
LIU Jiangtao1,2, ZHOU Lelai1,2,*( ), LI Yibin1,2
), LI Yibin1,2
Received:2023-05-29
Online:2024-01-30
Contact:
ZHOU Lelai
CLC Number:
LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain[J]. Acta Armamentarii, 2024, 45(1): 166-183.
Add to citation manager EndNote|Ris|BibTeX
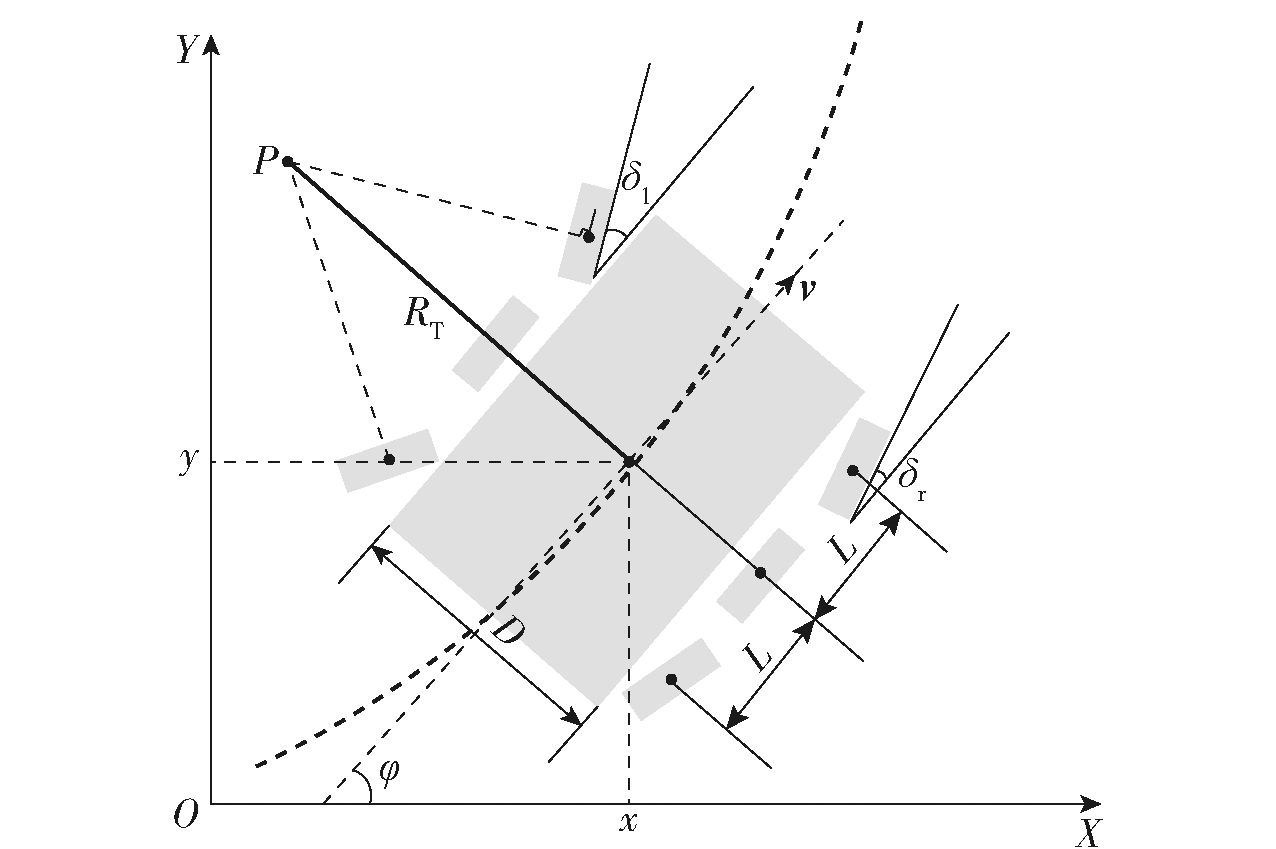
Fig.1 Kinematic model of non-complete constraint six-wheel independent drive independent steering robot
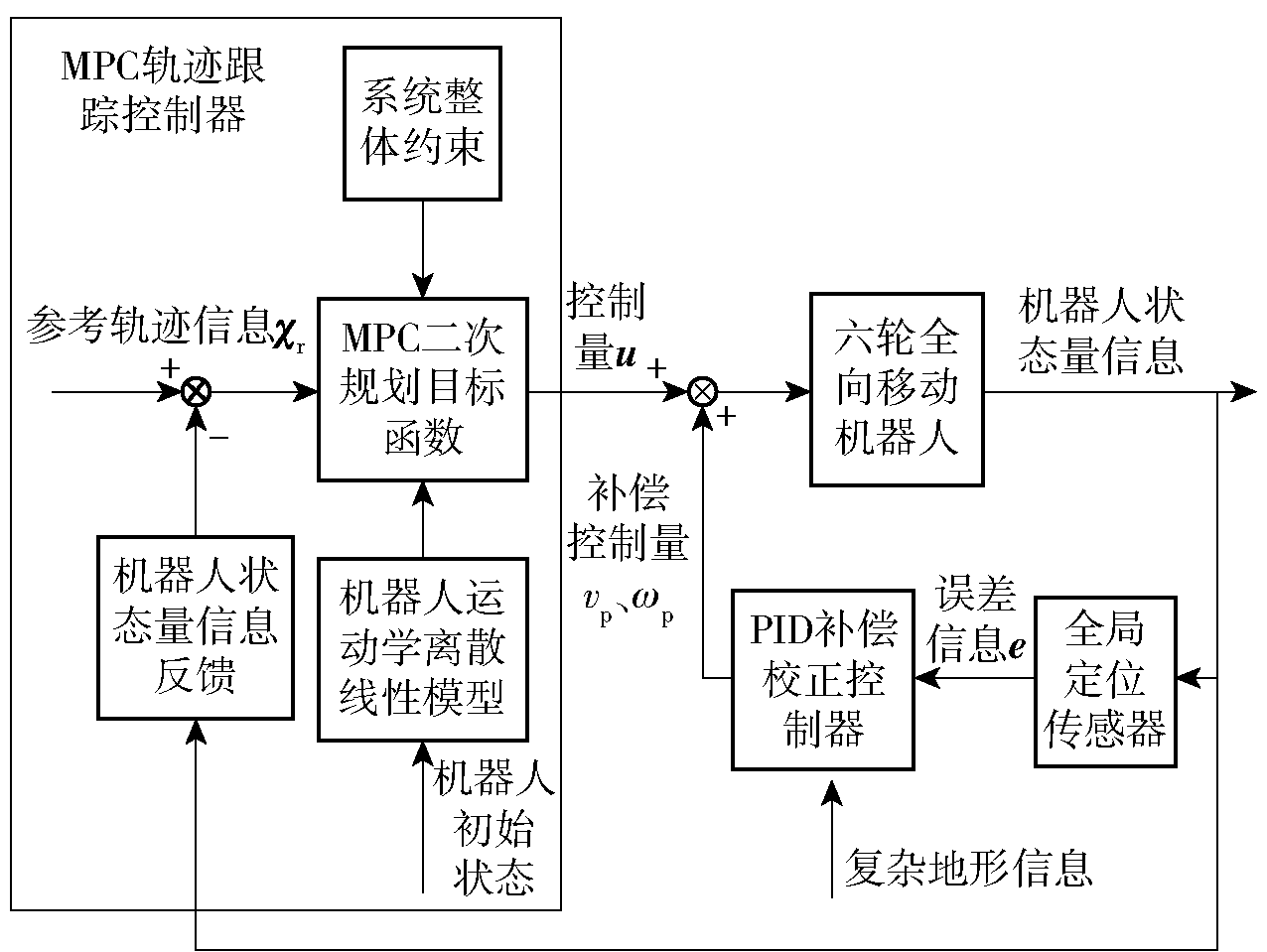
Fig.2 Block diagram of robot trajectory tracking control in complex terrain
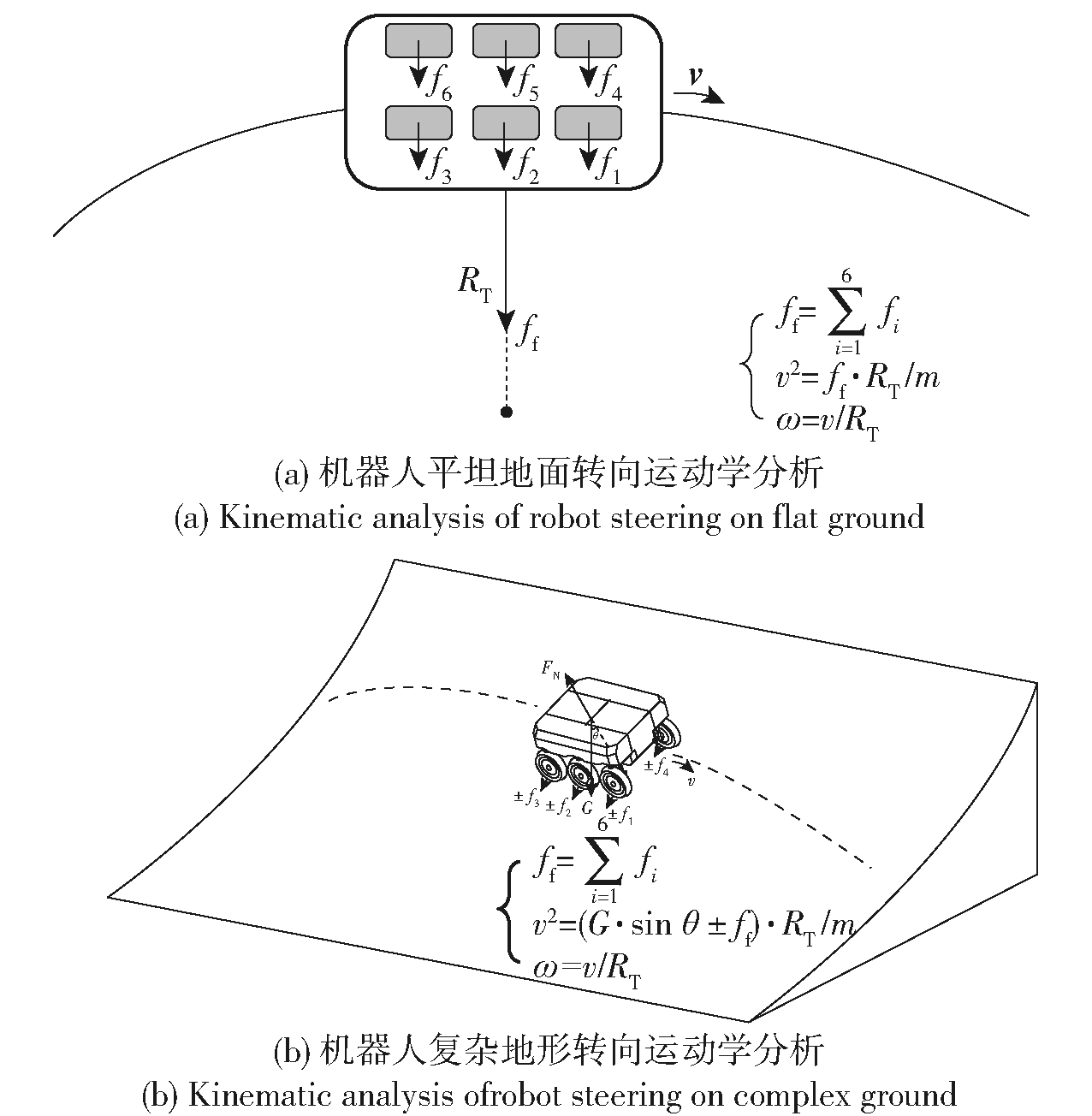
Fig.3 Comparison of robot steerings in different terrain environments
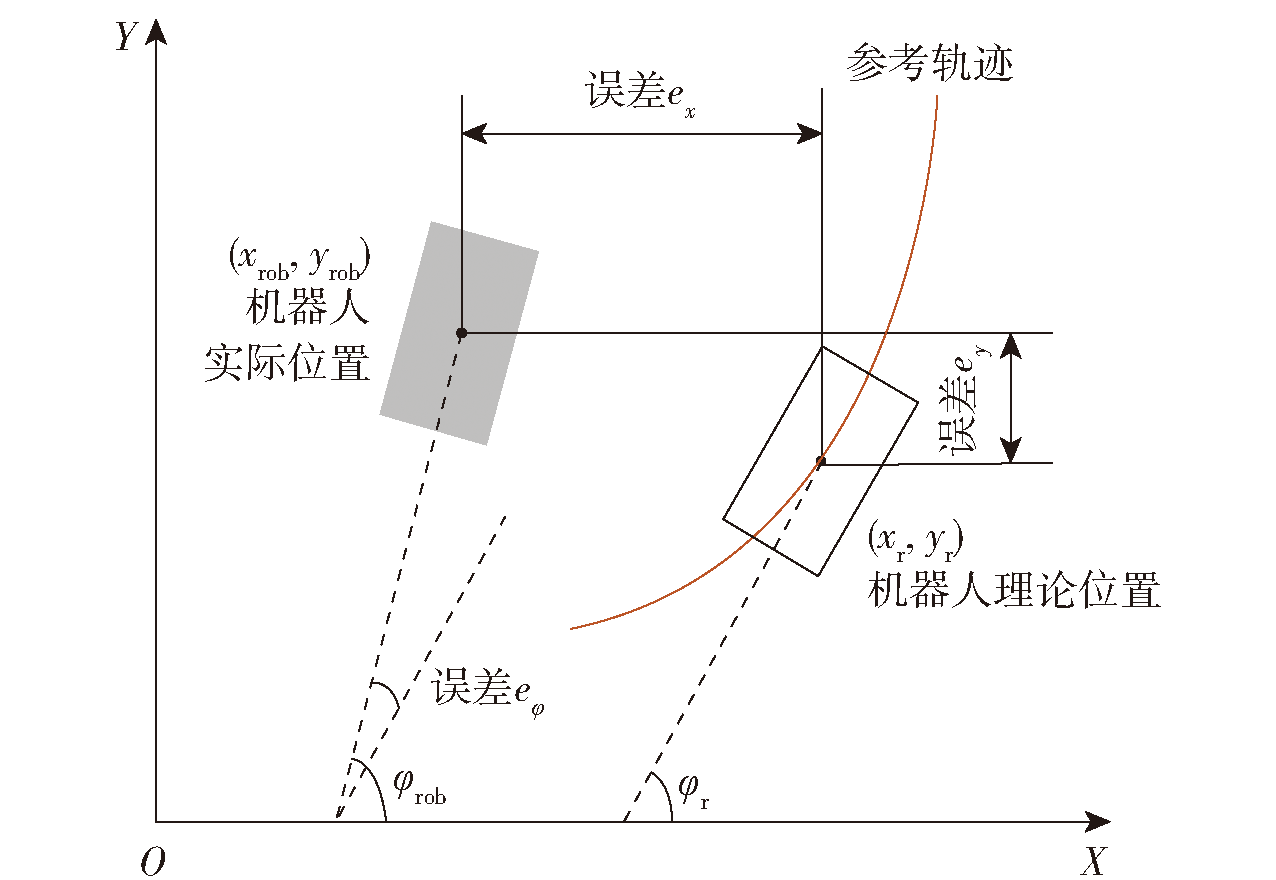
Fig.4 Deviation of robot from the reference trajectory
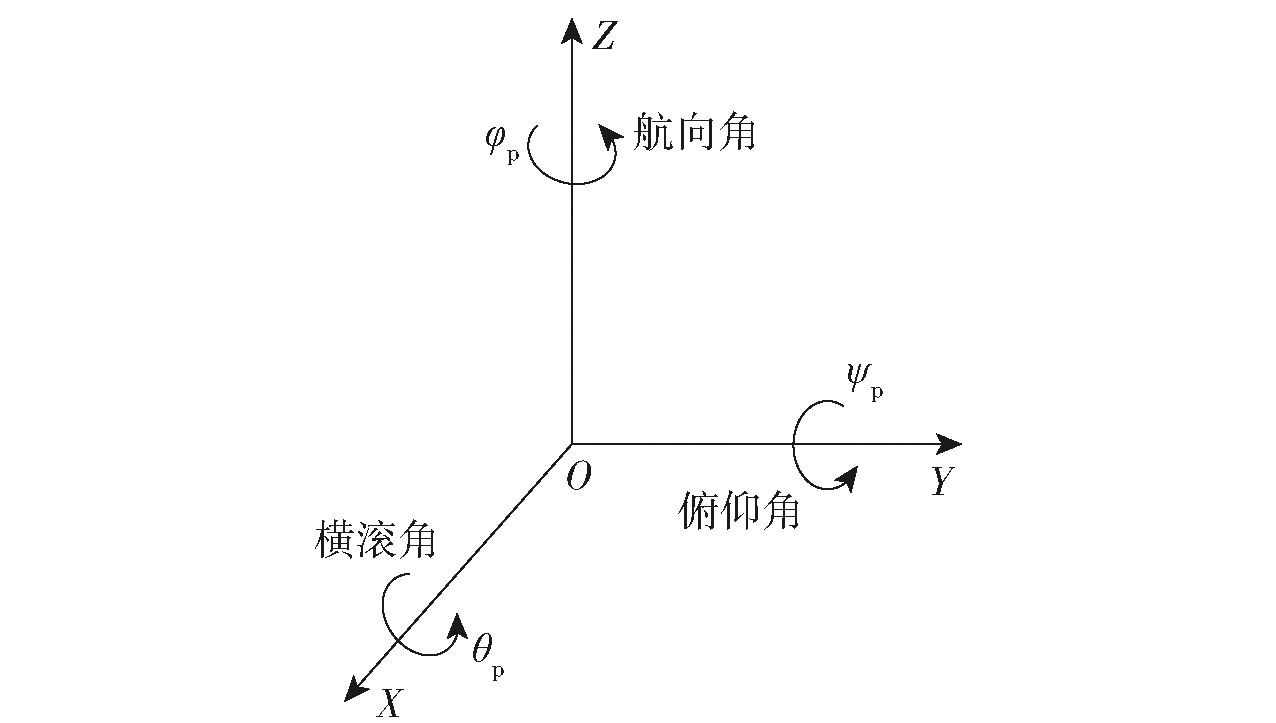
Fig.5 Three-dimensional coordinate angle representation
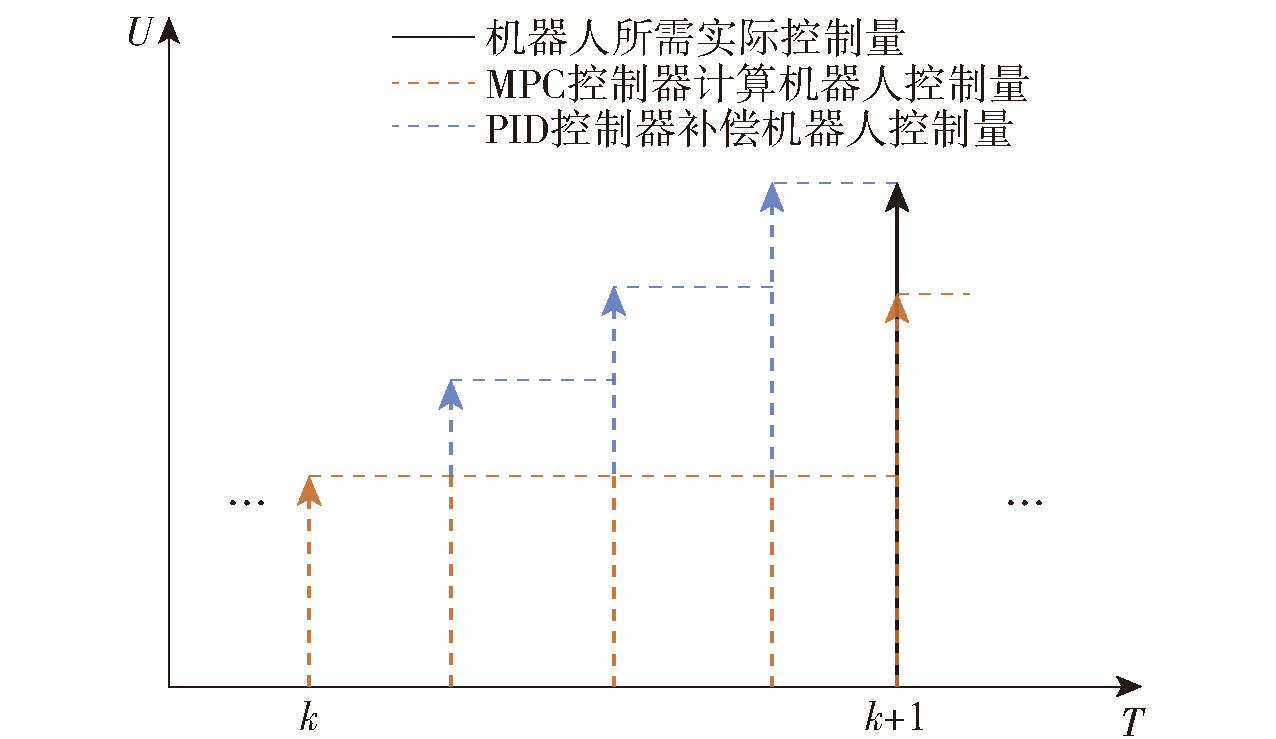
Fig.6 PID compensation correction
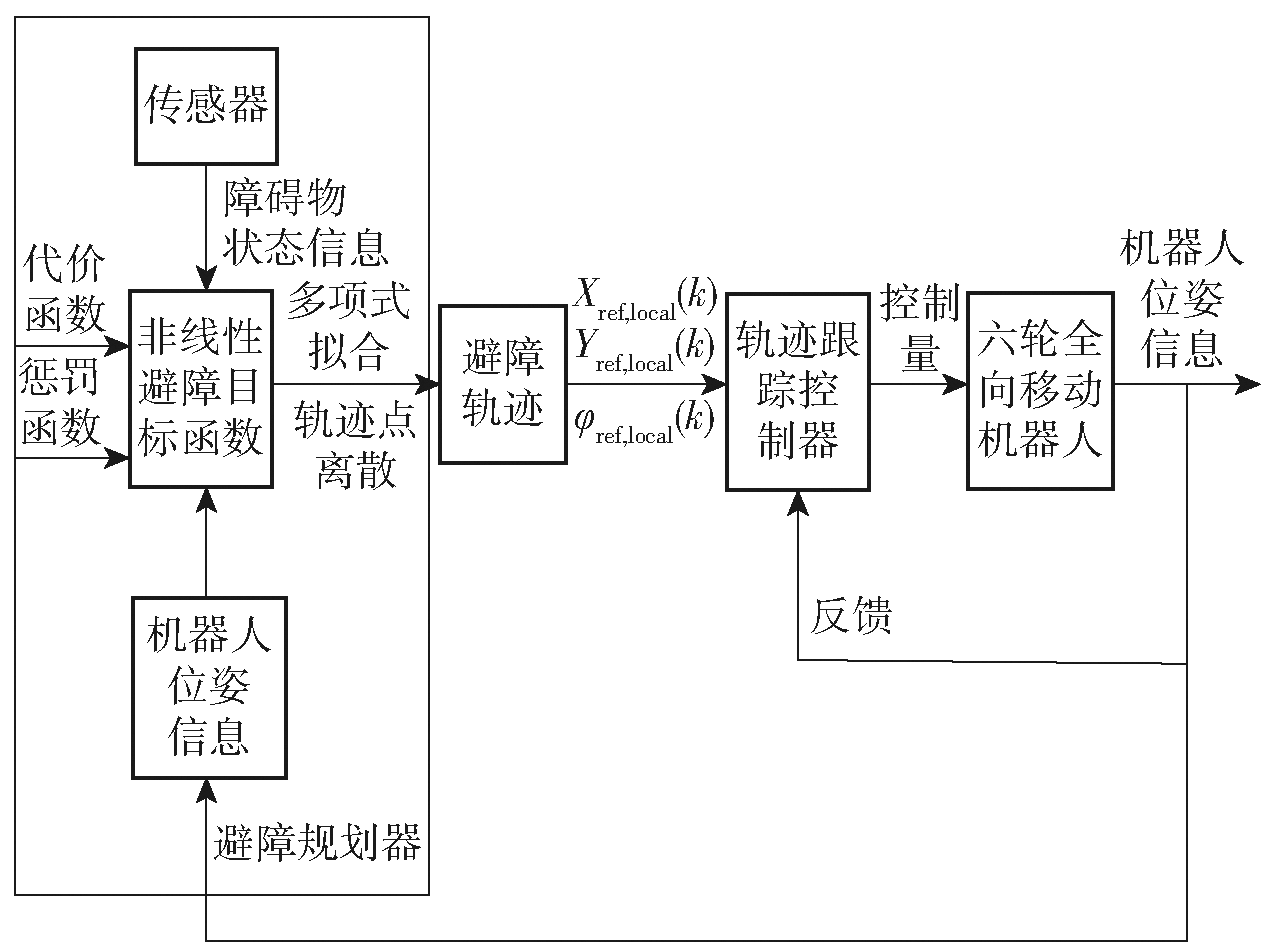
Fig.7 Block diagram of trajectory planning control system combined with obstacle avoidance control
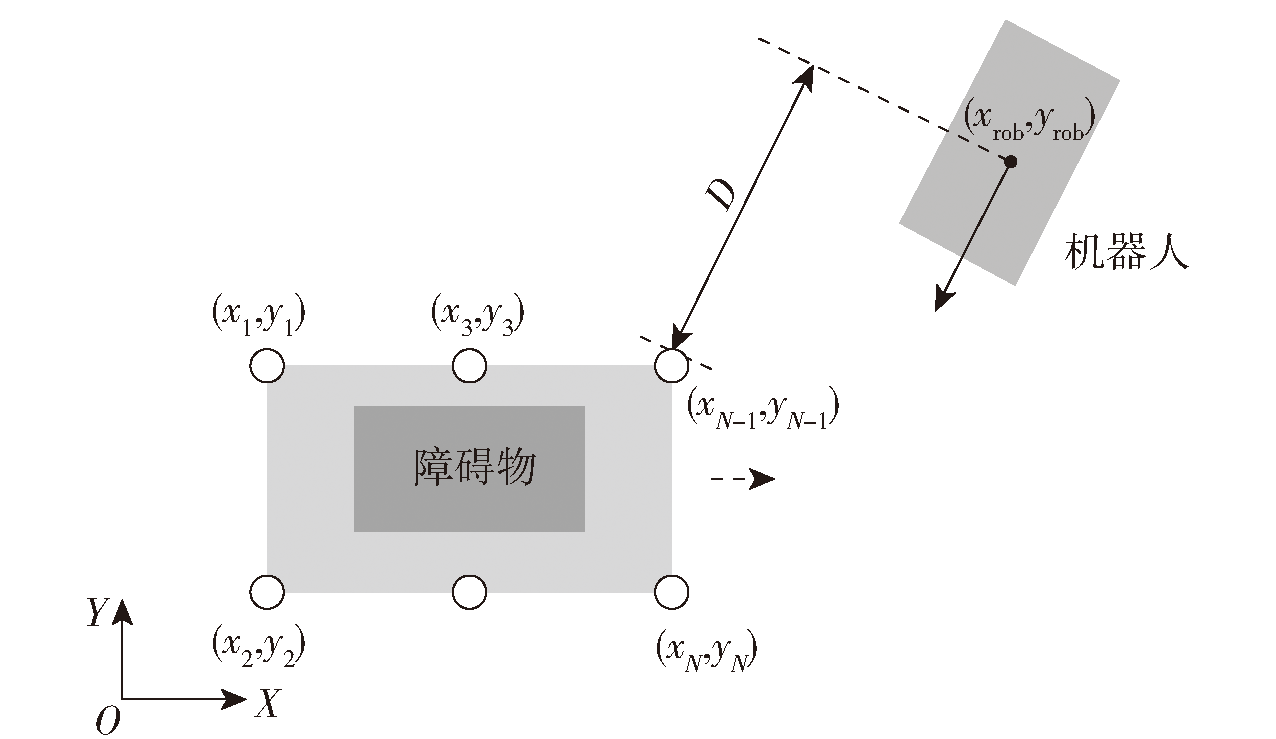
Fig.8 Obstacle expansion and splitting point

Fig.9 Obstacle avoidance penalty function
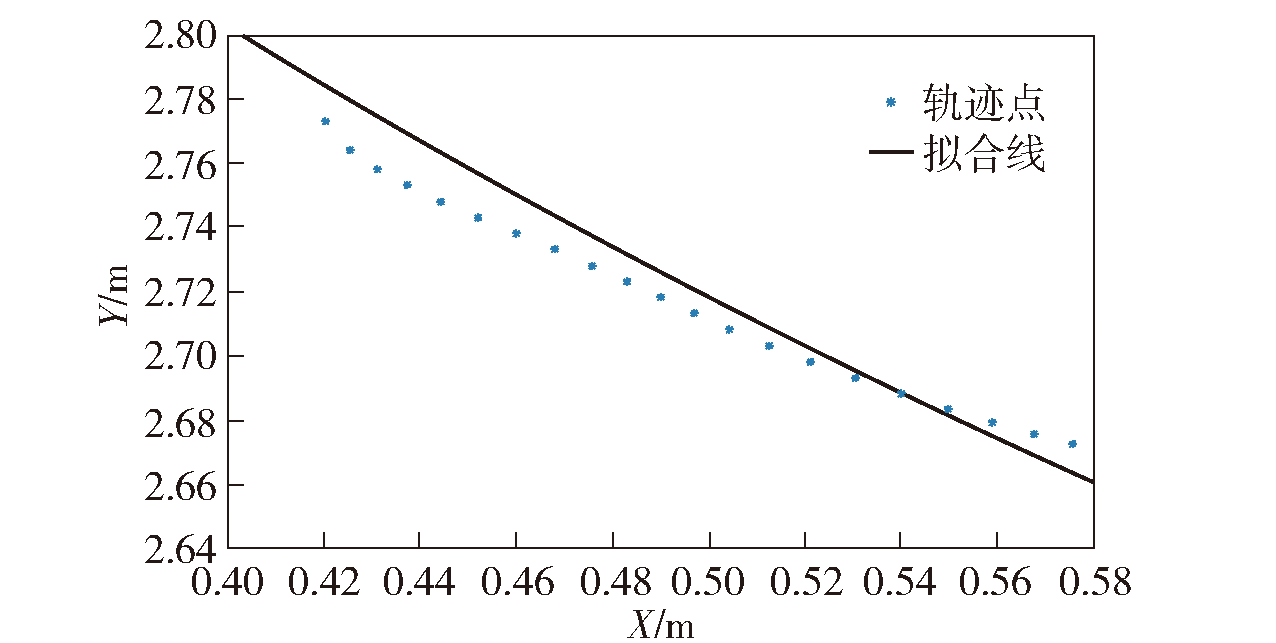
Fig.10 Fitting results of partial segment trajectory
| 参数 | 取值 |
|---|---|
| 机器人尺寸(长×宽×高)/mm | 700×500×550 |
| 机器人整机质量/kg | 212 |
| 轮胎尺寸/mm | 宽80,直径215 |
| 驱动电机最大扭矩/(N·m) | 500 |
| 转向电机最大扭矩/(N·m) | 500 |
Table 1 Robot parameters
| 参数 | 取值 |
|---|---|
| 机器人尺寸(长×宽×高)/mm | 700×500×550 |
| 机器人整机质量/kg | 212 |
| 轮胎尺寸/mm | 宽80,直径215 |
| 驱动电机最大扭矩/(N·m) | 500 |
| 转向电机最大扭矩/(N·m) | 500 |

Fig.11 Simulation of operating platform and robot control
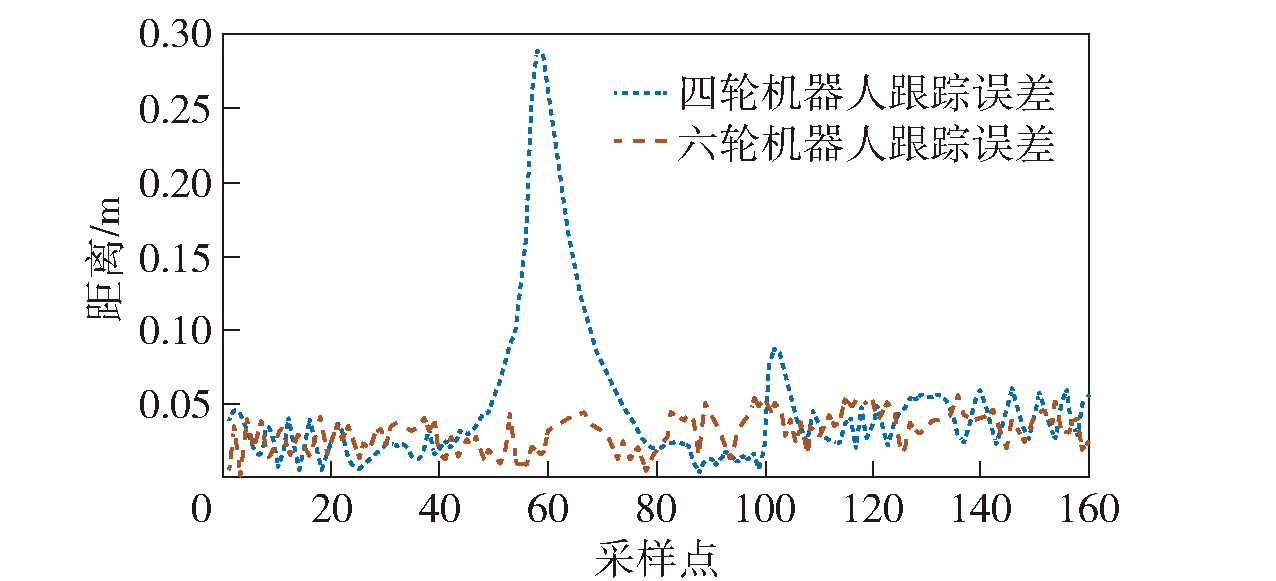
Fig.12 Comparison of trajectory tracking errors of four-wheeled robot and six-wheeled robot

Fig.13 Concave slope coordinates during robot motion
| 控制器类型 | 参数 | 数值 |
|---|---|---|
| PID控制器 | 系数 | kp:110, ki:0.1, kd:0.30 |
| 采样时间/ms | 10 | |
| Pure Pursuit | 前视距离系数 | 0.15 |
| 控制器 | 前视距离/m | 1.2 |
| 采样时间/ms | 10 | |
| MPC采样周期/ms | 50 | |
| MPC控制器 | MPC控制步长 | 30 |
| MPC预测步长 | 60 | |
| MPC采样周期/ms | 50 | |
| MPC控制步长 | 30 | |
| MPC预测步长 | 60 | |
| 本文控制器 | PID采样周期/ms | 10 |
| Yaw角放大倍数 | 1.13~1.25 | |
| PID常数项比例系数 | kp:0.25, ki:0.05, kd:0.10 | |
| PID增益项比例系数 | λ1:5, λ2:1.5, λ3:2 |
Table 2 Concave slope experimental parameters
| 控制器类型 | 参数 | 数值 |
|---|---|---|
| PID控制器 | 系数 | kp:110, ki:0.1, kd:0.30 |
| 采样时间/ms | 10 | |
| Pure Pursuit | 前视距离系数 | 0.15 |
| 控制器 | 前视距离/m | 1.2 |
| 采样时间/ms | 10 | |
| MPC采样周期/ms | 50 | |
| MPC控制器 | MPC控制步长 | 30 |
| MPC预测步长 | 60 | |
| MPC采样周期/ms | 50 | |
| MPC控制步长 | 30 | |
| MPC预测步长 | 60 | |
| 本文控制器 | PID采样周期/ms | 10 |
| Yaw角放大倍数 | 1.13~1.25 | |
| PID常数项比例系数 | kp:0.25, ki:0.05, kd:0.10 | |
| PID增益项比例系数 | λ1:5, λ2:1.5, λ3:2 |

Fig.14 Trajectory tracking simulation on concave slope
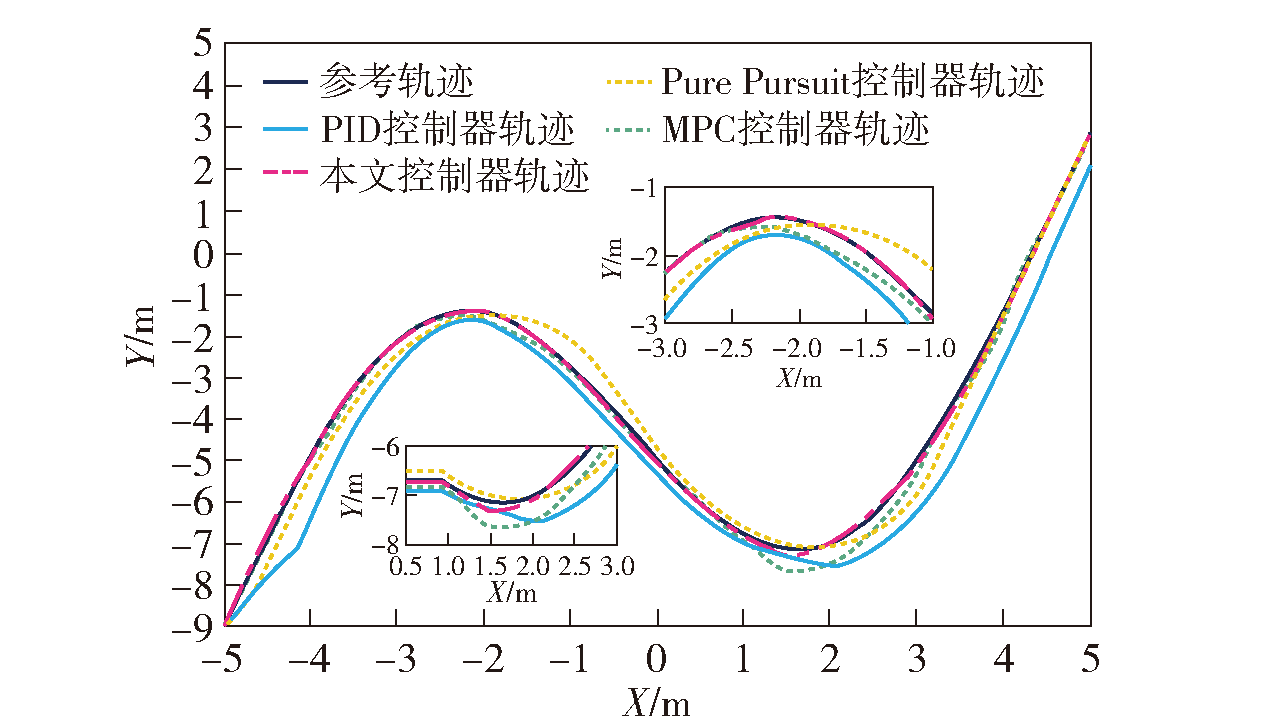
Fig.15 Comparison of tracking trajectories of concave ramp controllers
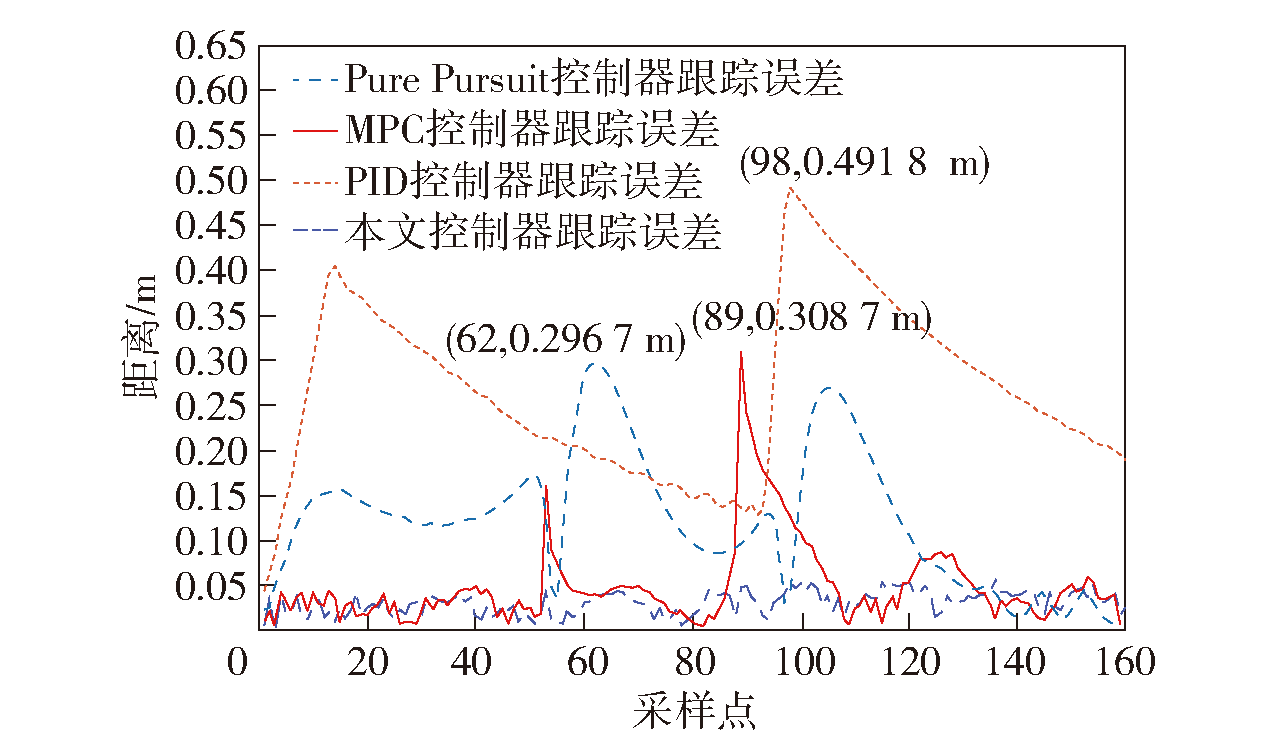
Fig.16 Comparison of tracking errors of concave ramp contrllers
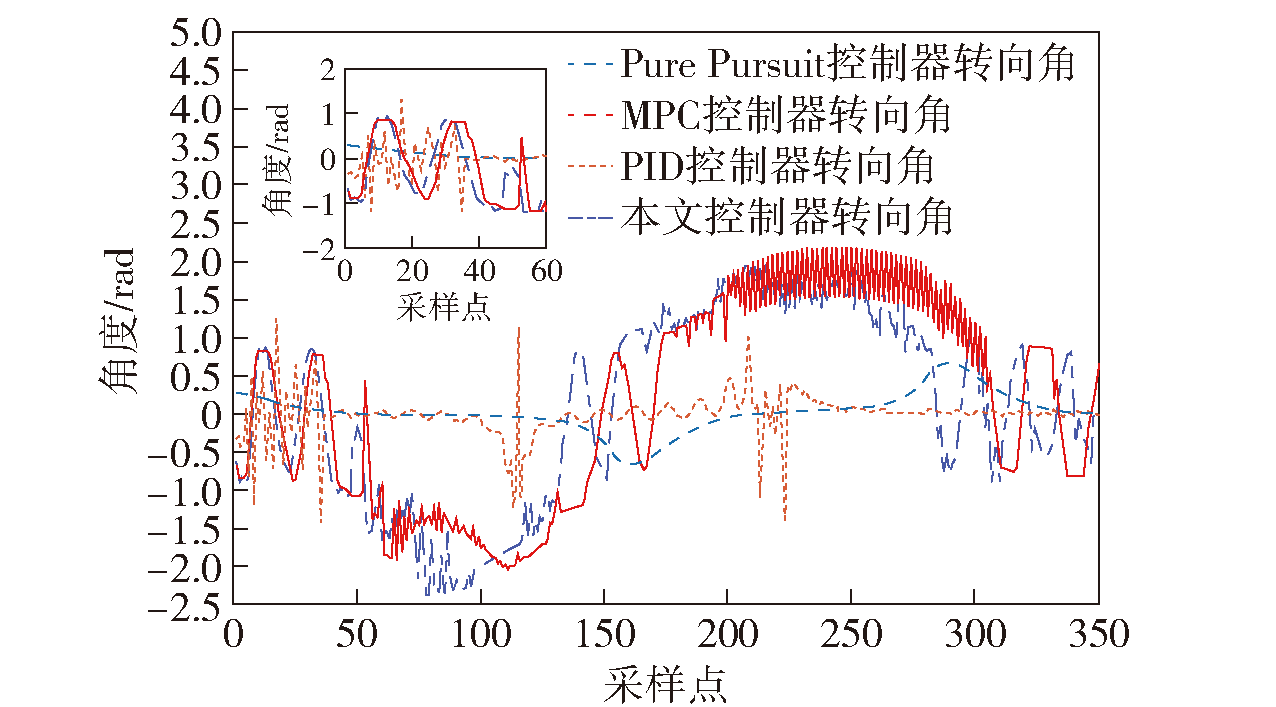
Fig.17 Comparison of steering angles of concave slope controllers

Fig.18 Convex slope coordinates duringrobot motion
| 控制器类型 | 参数 | 数值 |
|---|---|---|
| PID控制器 | 系数 | kp:110, ki:0.1, kd:0.30 |
| 采样时间/ms | 10 | |
| Pure Pursuit | 前视距离系数 | 0.15 |
| 控制器 | 前视距离/m | 1.2 |
| 采样时间/ms | 10 | |
| MPC采样周期/ms | 50 | |
| MPC控制器 | MPC控制步长 | 30 |
| MPC预测步长 | 60 | |
| MPC采样周期/ms | 50 | |
| MPC控制步长 | 30 | |
| MPC预测步长 | 60 | |
| 本文控制器 | PID采样周期/ms | 10 |
| Yaw角放大倍数 | 1.13~1.35 | |
| PID常数项比例系数 | kp:0.30, ki:0.10, kd:0.15 | |
| PID增益项比例系数 | λ1:5.5, λ2:1.5, λ3:2.5 |
Table 3 Convex ramp experimental parameters
| 控制器类型 | 参数 | 数值 |
|---|---|---|
| PID控制器 | 系数 | kp:110, ki:0.1, kd:0.30 |
| 采样时间/ms | 10 | |
| Pure Pursuit | 前视距离系数 | 0.15 |
| 控制器 | 前视距离/m | 1.2 |
| 采样时间/ms | 10 | |
| MPC采样周期/ms | 50 | |
| MPC控制器 | MPC控制步长 | 30 |
| MPC预测步长 | 60 | |
| MPC采样周期/ms | 50 | |
| MPC控制步长 | 30 | |
| MPC预测步长 | 60 | |
| 本文控制器 | PID采样周期/ms | 10 |
| Yaw角放大倍数 | 1.13~1.35 | |
| PID常数项比例系数 | kp:0.30, ki:0.10, kd:0.15 | |
| PID增益项比例系数 | λ1:5.5, λ2:1.5, λ3:2.5 |

Fig.19 Trajectory tracking simulation on convex slope
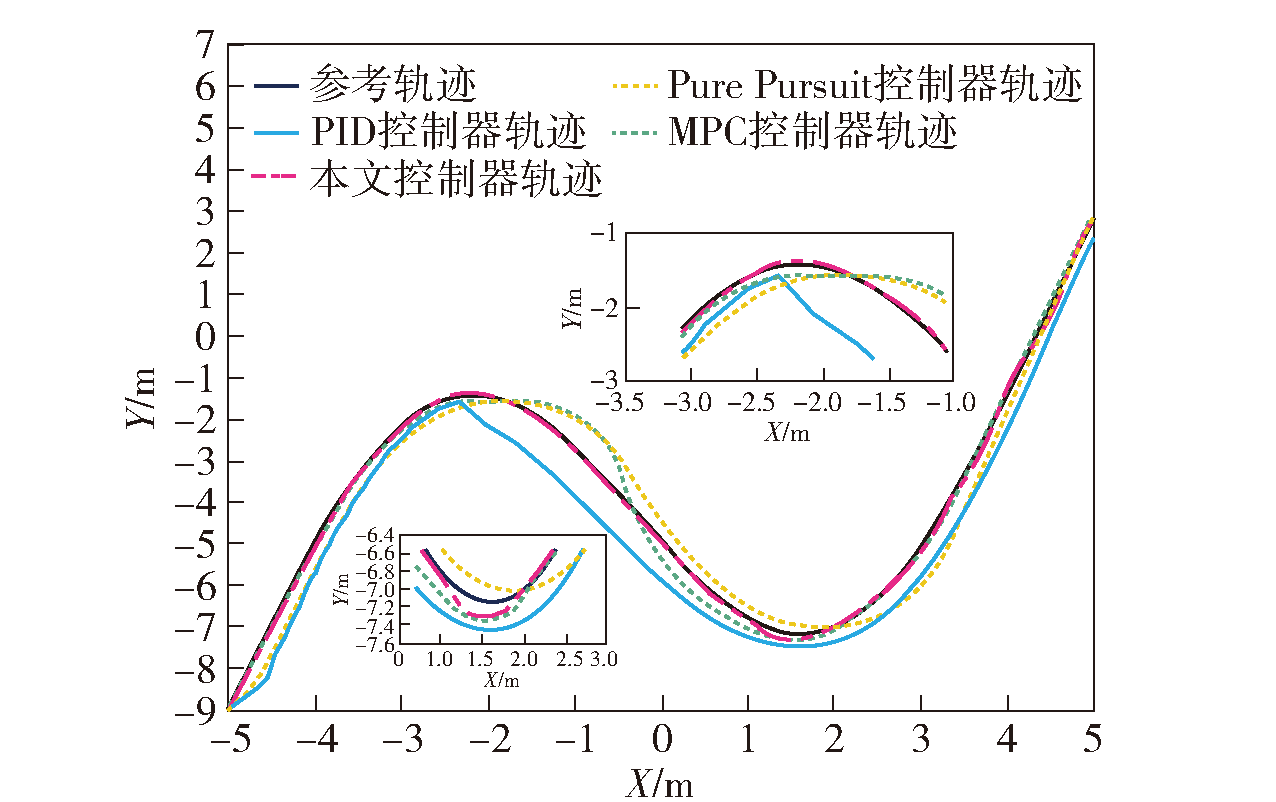
Fig.20 Comparison of tracking trajectories of convex ramp controllers

Fig.21 Comparison of tracking errors of convex ramp controllers
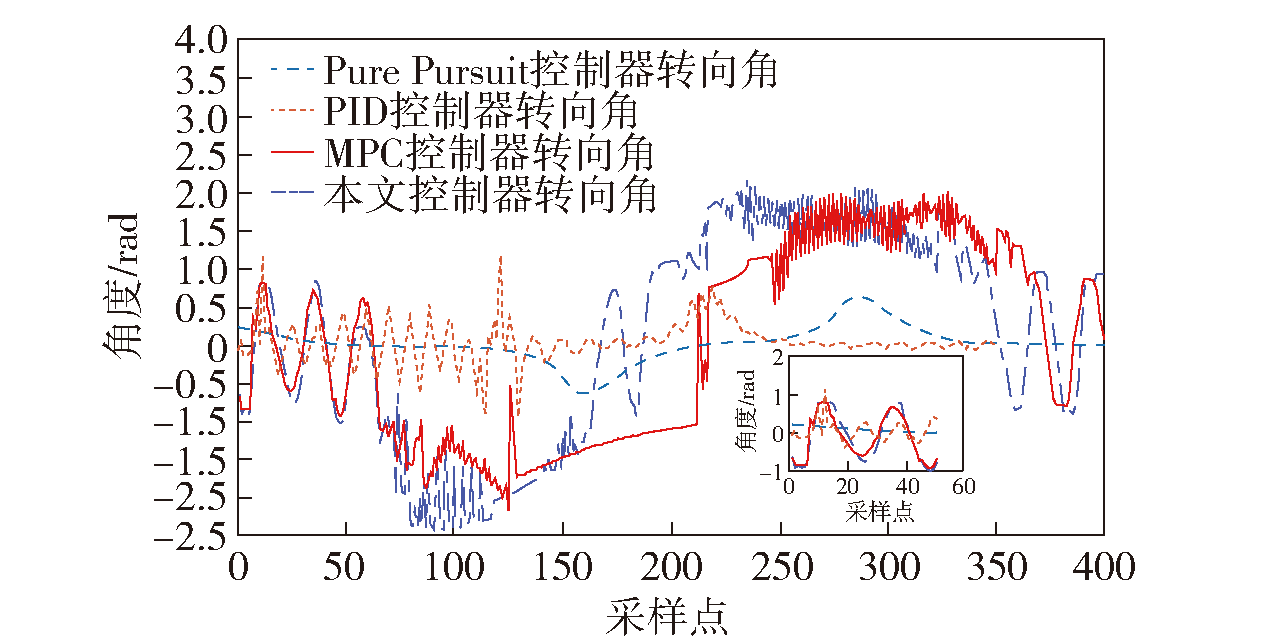
Fig.22 Comparison of steering angles of convex ramp controllers
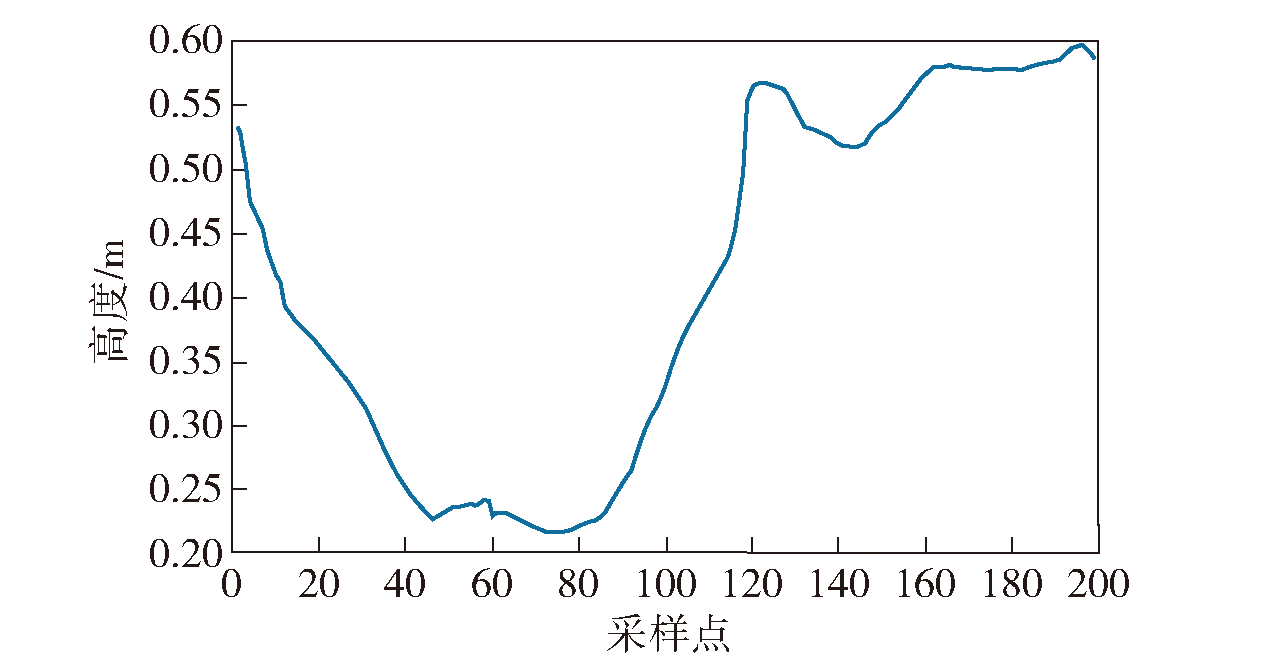
Fig.23 The change in the height of robot’s center of mass during trajectory tracking
| 控制器类型 | 参数 | 数值 |
|---|---|---|
| PID控制器 | 系数 | kp:110, ki:0.1, kd:0.30 |
| 采样时间/ms | 10 | |
| Pure Pursuit | 前视距离系数 | 0.15 |
| 控制器 | 前视距离/m | 1.2 |
| 采样时间/ms | 10 | |
| MPC采样周期/ms | 50 | |
| MPC控制器 | MPC控制步长 | 30 |
| MPC预测步长 | 60 | |
| MPC采样周期/ms | 50 | |
| MPC控制步长 | 30 | |
| MPC预测步长 | 60 | |
| 本文控制器 | PID采样周期/ms | 10 |
| Yaw角放大倍数 | 1.2~1.4 | |
| PID常数项比例系数 | kp:0.32, ki:0.13, kd:0.16 | |
| PID增益项比例系数 | λ1:5.8, λ2:1.6, λ3:2.8 |
Table 4 Experimental parameters of uneven and convex roads
| 控制器类型 | 参数 | 数值 |
|---|---|---|
| PID控制器 | 系数 | kp:110, ki:0.1, kd:0.30 |
| 采样时间/ms | 10 | |
| Pure Pursuit | 前视距离系数 | 0.15 |
| 控制器 | 前视距离/m | 1.2 |
| 采样时间/ms | 10 | |
| MPC采样周期/ms | 50 | |
| MPC控制器 | MPC控制步长 | 30 |
| MPC预测步长 | 60 | |
| MPC采样周期/ms | 50 | |
| MPC控制步长 | 30 | |
| MPC预测步长 | 60 | |
| 本文控制器 | PID采样周期/ms | 10 |
| Yaw角放大倍数 | 1.2~1.4 | |
| PID常数项比例系数 | kp:0.32, ki:0.13, kd:0.16 | |
| PID增益项比例系数 | λ1:5.8, λ2:1.6, λ3:2.8 |
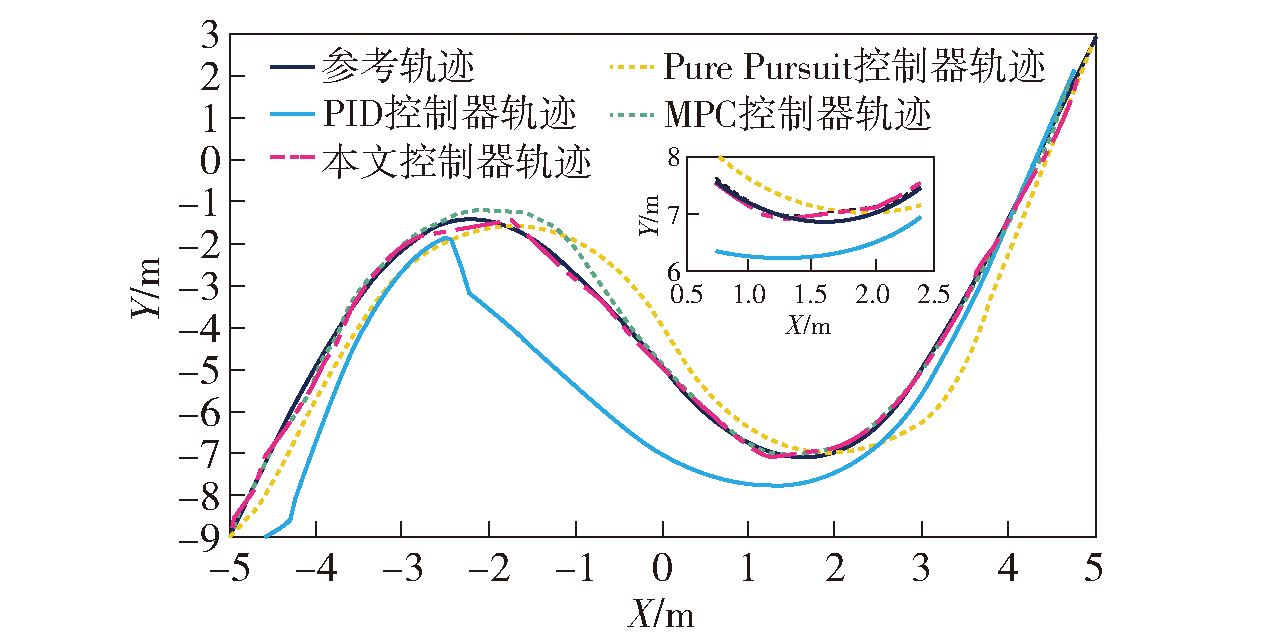
Fig.24 Comparison of tracking trajectories of concave and convex pavement controllers
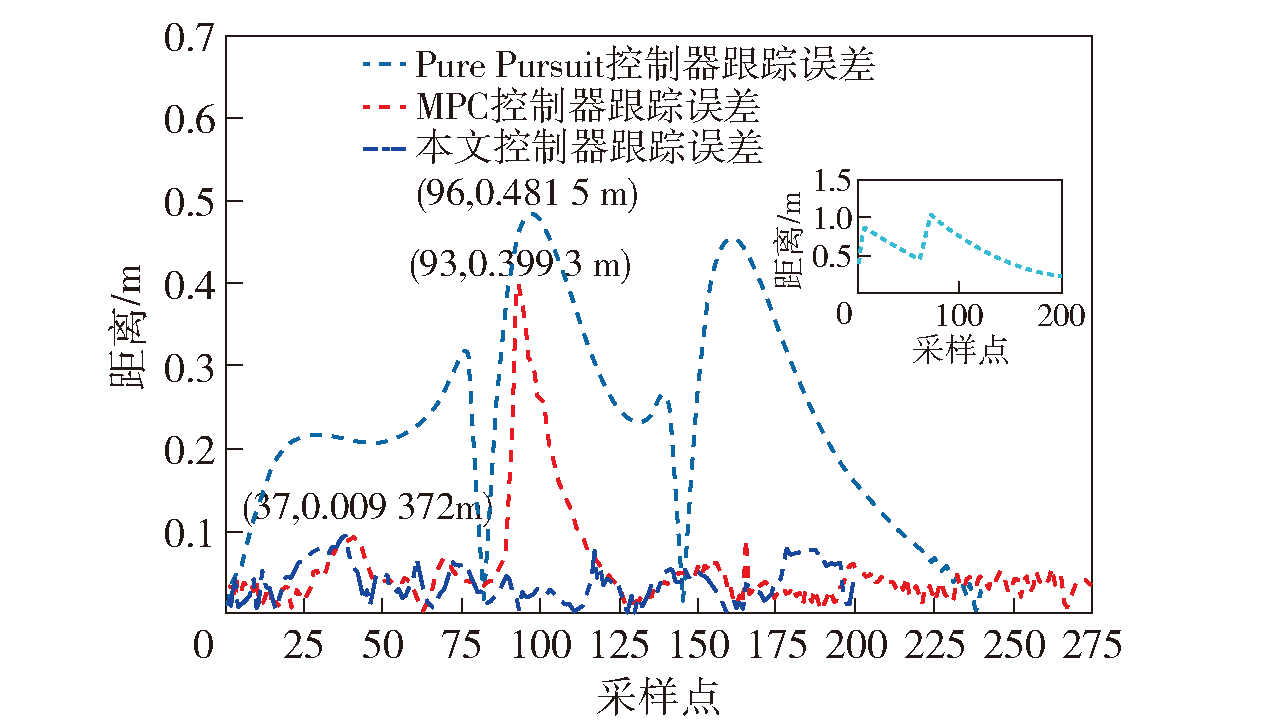
Fig.25 Comparison of tracking errors of concave and convex pavement controllers
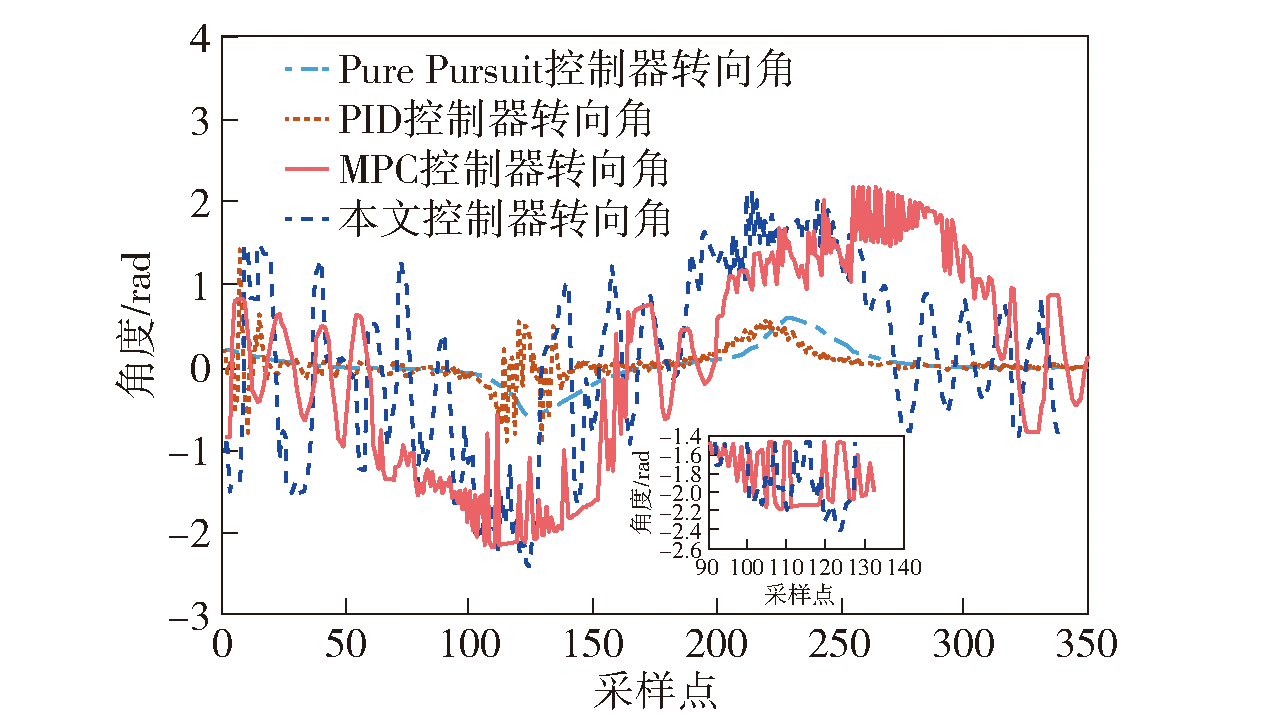
Fig.26 Comparison of steering angles of concave and convex road controllers
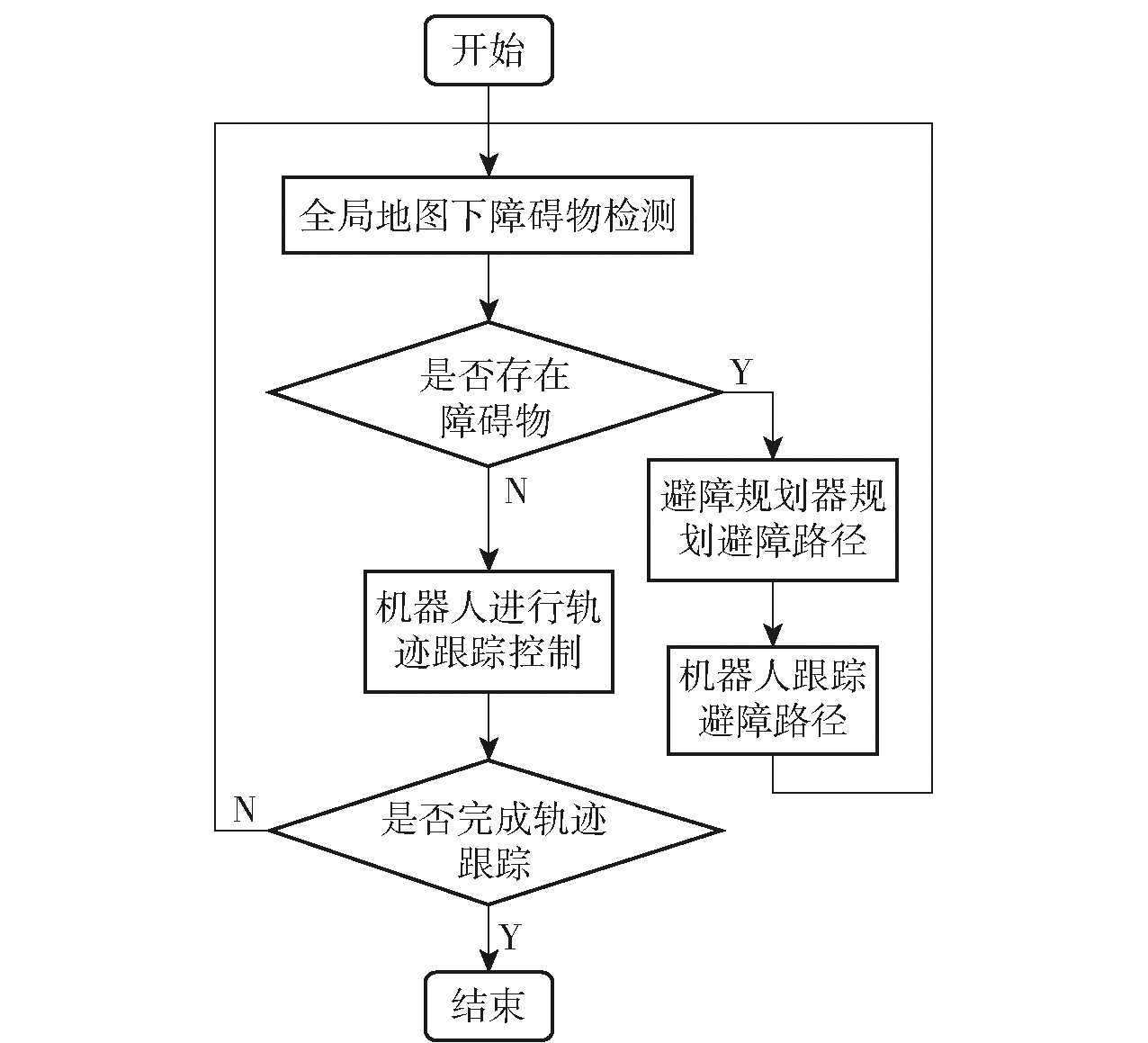
Fig.27 Flowchart of robot obstacle avoidance
| 参数 | 障碍物A | 障碍物B |
|---|---|---|
| 质心初始坐标/m | (0.8,3.2) | (5.4,3.2) |
| 长×宽×高/m | 0.3×0.3×0.5 | 0.3×0.3×0.5 |
| 质量/kg | 50 | 50 |
| 移动速度/(m·s-1) | 0 | 0.14~0.15 |
Table 5 Obstacle information
| 参数 | 障碍物A | 障碍物B |
|---|---|---|
| 质心初始坐标/m | (0.8,3.2) | (5.4,3.2) |
| 长×宽×高/m | 0.3×0.3×0.5 | 0.3×0.3×0.5 |
| 质量/kg | 50 | 50 |
| 移动速度/(m·s-1) | 0 | 0.14~0.15 |

Fig.28 Comparison of obstacle avoidance trajectories of robot by using the dynamic window method and the obstacle avoidance method in the paper
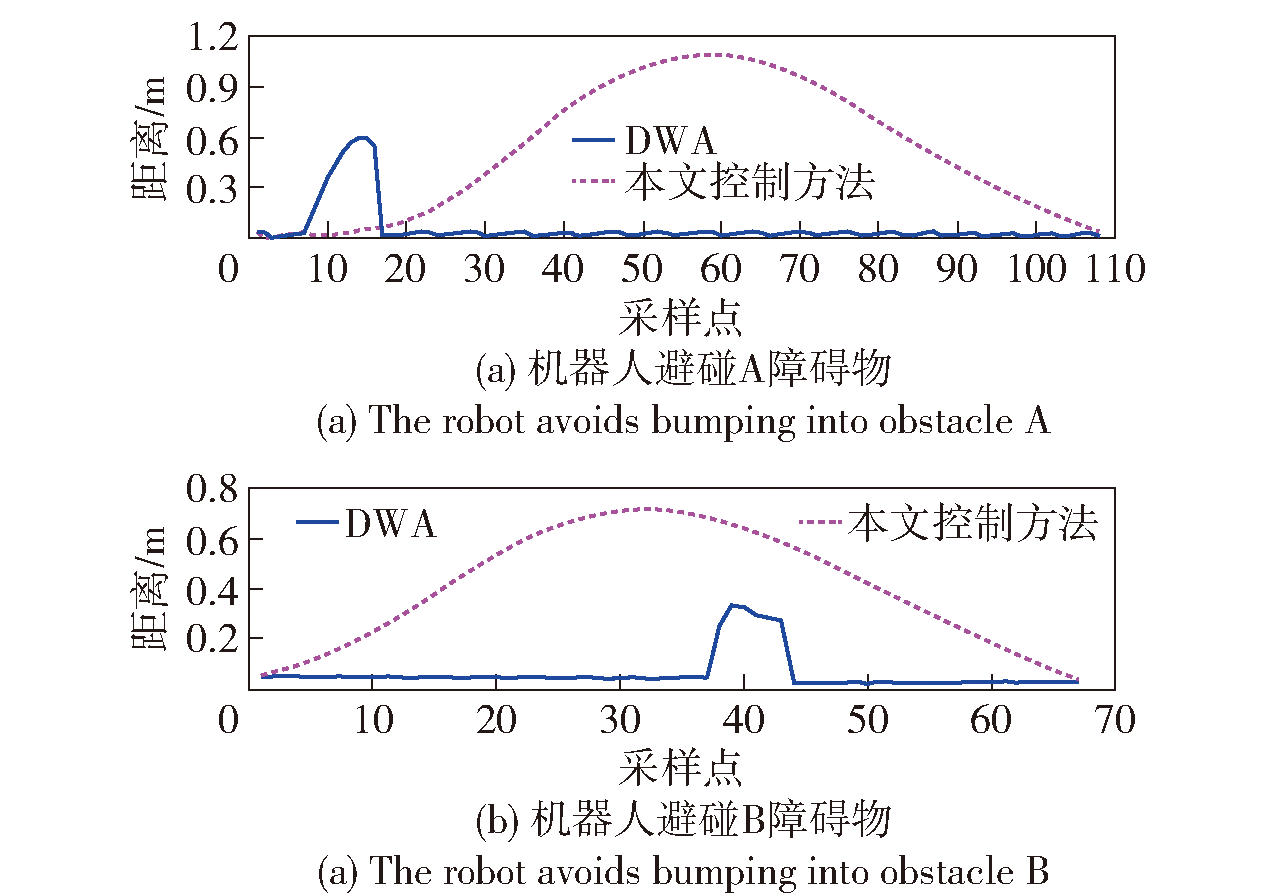
Fig.29 Representation of distance deviation between the robot and the reference trajectories by the dynamic window method and the obstacle avoidance method in the paper
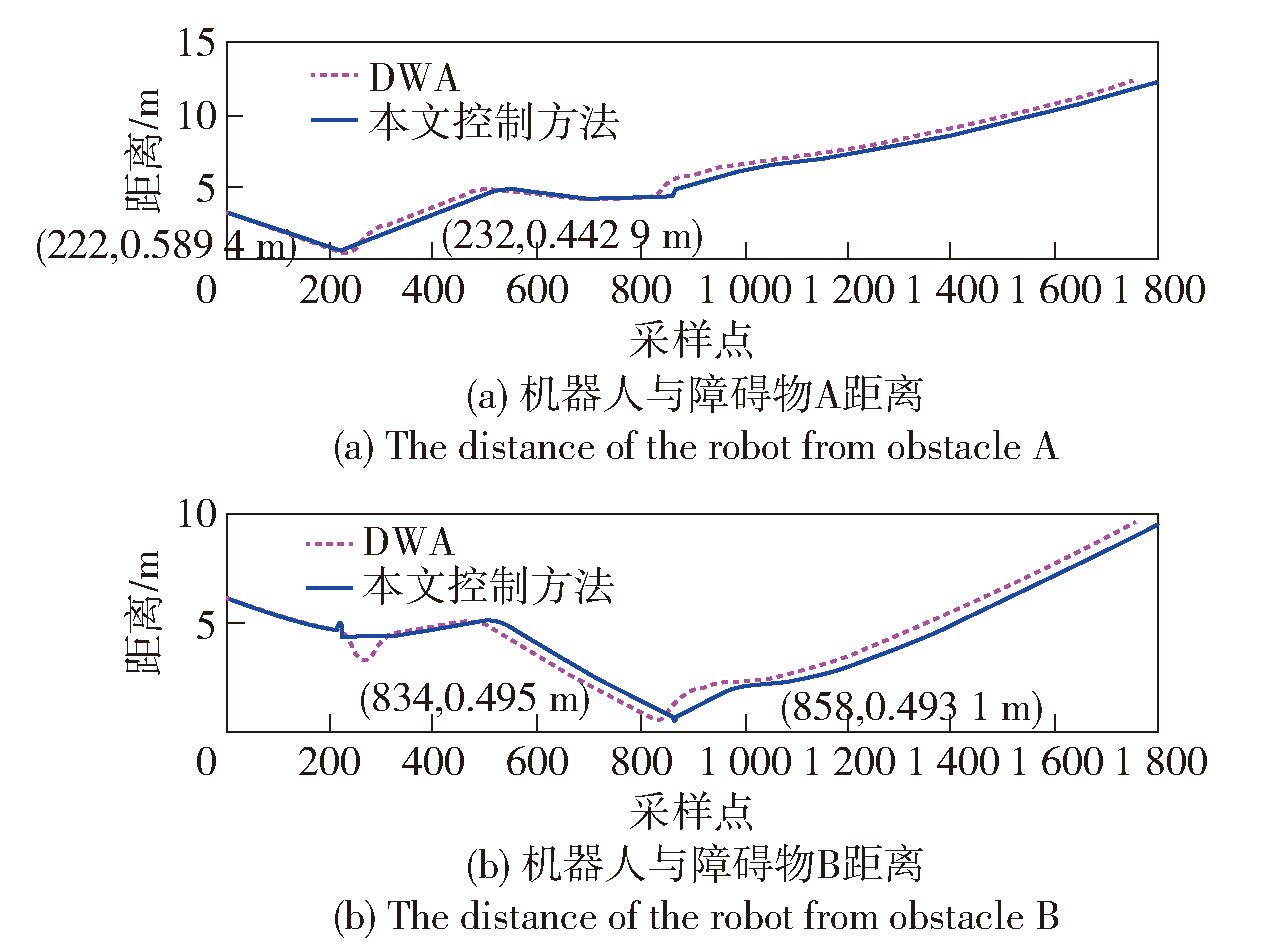
Fig.30 The distance between the robot’s center of mass and the center of the obstacle’s center of mass expressed by the dynamic window method and the obstacle avoidance method in the paper
| [1] |
doi: 10.1109/LSP.2016. URL |
| [2] |
doi: 10.1109/TVT.25 URL |
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
doi: 10.1109/TIV.2020.3045837 URL |
| [8] |
doi: 10.1109/TVT.2022.3140240 URL |
| [9] |
doi: 10.1109/TSMC.6221021 URL |
| [10] |
|
| [11] |
|
| [12] |
doi: 10.1109/TVT.2022.3152542 URL |
| [13] |
doi: 10.1109/LRA.2022.3161710 URL |
| [14] |
|
| [15] |
doi: 10.1109/TSMC.2019.2962732 URL |
| [16] |
doi: 10.1109/OJITS.2021.3137931 URL |
| [17] |
|
| [18] |
严浙平, 杨皓宇, 张伟, 等. 基于模型预测—中枢模式发生器的六足机器人轨迹跟踪控制[J]. 机器人, 2023, 45(1):58-69.
|
|
|
|
| [19] |
|
| [20] |
张超省, 王健, 张林, 等. 面向复杂障碍场的多智能体系统集群避障模型[J]. 兵工学报, 2021, 42(1):141-150.
|
|
doi: 10.3969/j.issn.1000-1093.2021.01.016 |
|
| [21] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
| [22] |
杜广泽, 张旭东, 邹渊, 等. 非结构道路场景下轮式无人车辆避障算法[J]. 兵工学报, 2020, 41(10): 2096-2105.
doi: 10.3969/j.issn.1000-1093.2020.10.020 |
|
doi: 10.3969/j.issn.1000-1093.2020.10.020 |
|
| [23] |
张家闻, 房浩霖, 李家旺. 基于复杂约束条件的欠驱动AUV三维路径规划[J]. 兵工学报, 2022, 43(6): 1407-1414.
doi: 10.12382/bgxb.2021.0340 |
|
doi: 10.12382/bgxb.2021.0340 |
| [1] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| [2] | XU Peng, ZHAO Jianxin, FAN Wenhui, QIU Tianqi, JIANG Lei, LIANG Zhenjie, LIU Yufei. Specific Complex Locomotion Skills Control for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 135-145. |
| [3] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [4] | DU Hongbao, WANG Zhengjie, TANG Lixi, ZHANG Xiaoning. Control Barrier Function-based Control for Aircraft Avoidance and Guidance with Dynamic Obstacles [J]. Acta Armamentarii, 2023, 44(9): 2814-2823. |
| [5] | LU Jiaxing, LIU Haiou, GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong. Trajectory Tracking Control of Unmanned Tracked Vehicles Based on Adaptive Dual-Parameter Optimization [J]. Acta Armamentarii, 2023, 44(4): 960-971. |
| [6] | ZHANG Yuanbo, XIANG Changle, WANG Weida, CHEN Yongdan. A Particle Swarm Optimization and Ant Colony Optimization Fusion Algorithm-based Model Predictve Torque Coordnation Control Strategy for Distributed Electric Drive Vehicle [J]. Acta Armamentarii, 2023, 44(11): 3253-3258. |
| [7] | JIANG Yan, DING Yuyan, ZHANG Xinglong, XU Xin. A Human-machine Collaborative Control Algorithm for Intelligent Vehicles Based on Model Prediction and Policy Learning [J]. Acta Armamentarii, 2023, 44(11): 3465-3477. |
| [8] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [9] | SONG Jiarui, TAO Gang, LI Derun, ZANG Zheng, WU Shaobin, GONG Jianwei. Robust Model Predictive Control for Manned and Unmanned Vehicle Formation Based on Parameter Self-Optimization [J]. Acta Armamentarii, 2023, 44(1): 84-97. |
| [10] | ZHOU Qiu, ZHOU Yue, SUN Hongming, GUO Wei, WU Kai, LAN Yanjun. Path Planning and Tracking Control Method of Deep-Sea Landing Vehicle [J]. Acta Armamentarii, 2023, 44(1): 298-306. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||