
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (S2): 178-190.doi: 10.12382/bgxb.2023.0851
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
LI Caoyan1, GUO Zhenchuan1, ZHENG Dongdong2, WEI Yanling1,*( )
)
Received:2023-09-01
Online:2024-01-10
Contact:
WEI Yanling
CLC Number:
LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control[J]. Acta Armamentarii, 2023, 44(S2): 178-190.
Add to citation manager EndNote|Ris|BibTeX
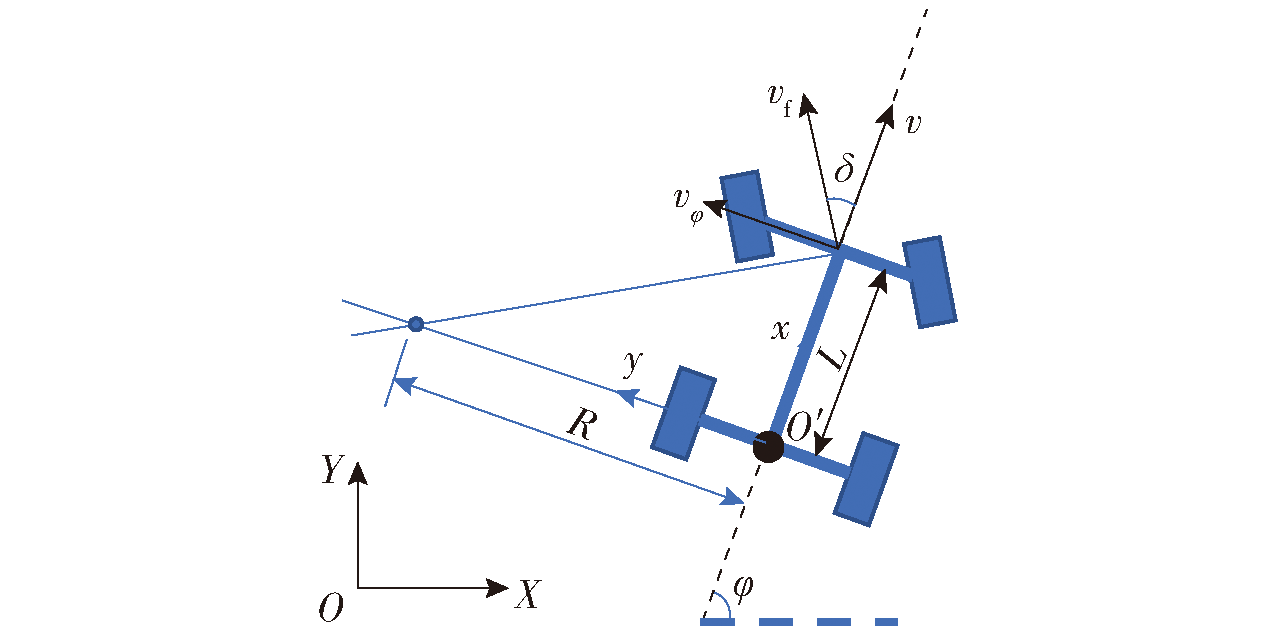
Fig.1 Kinematics model of robot chassis
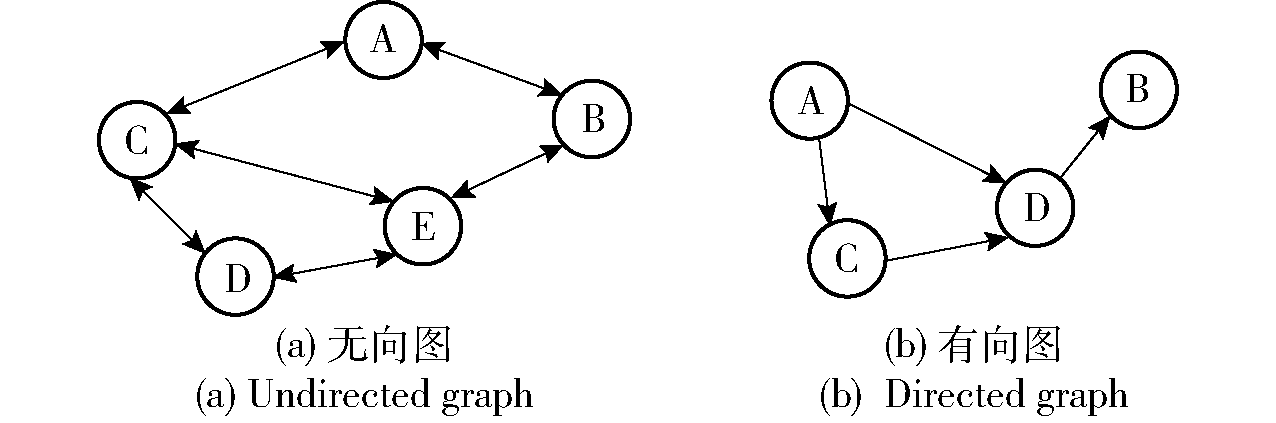
Fig.2 Undirected graph and directed graph

Fig.3 Directed communication network of four mobile robots
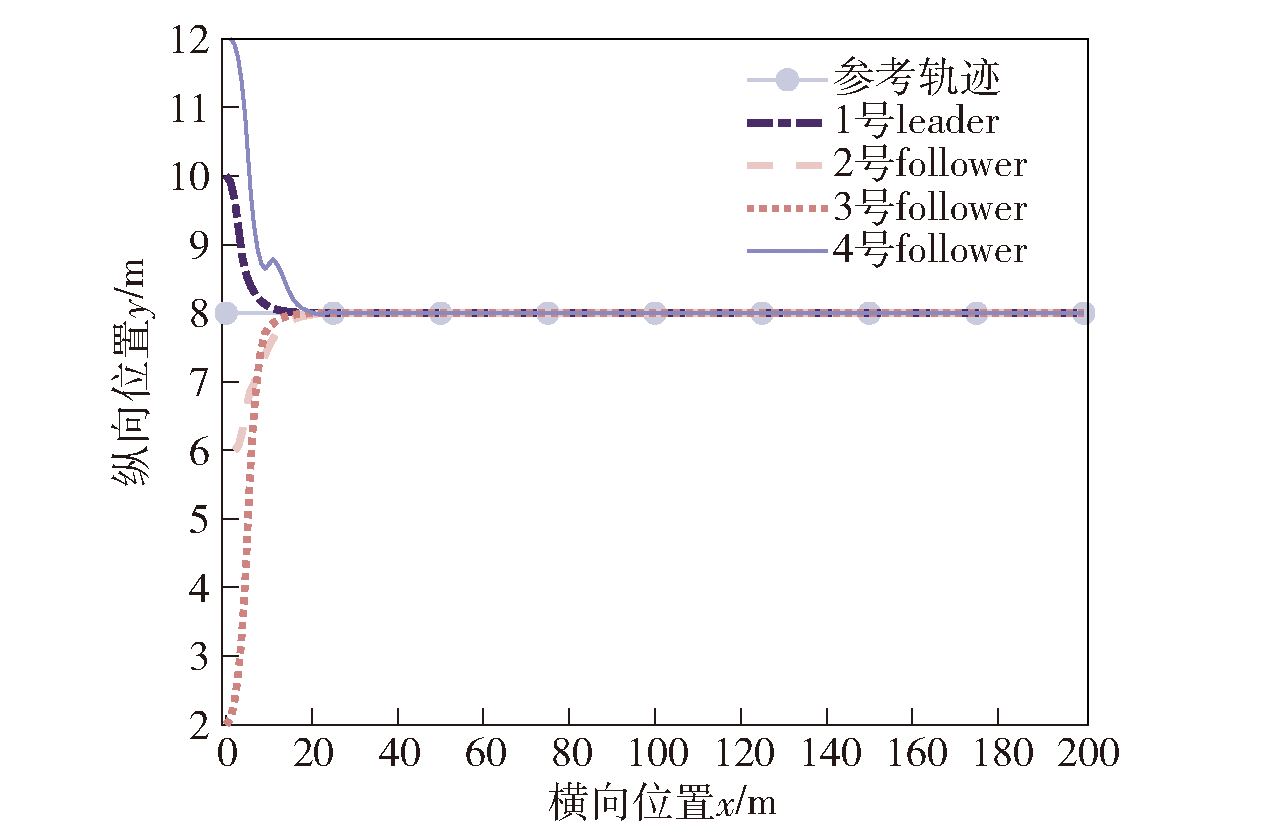
Fig.4 Consensus trajectory tracking result of multi-robot (linear trajectory)
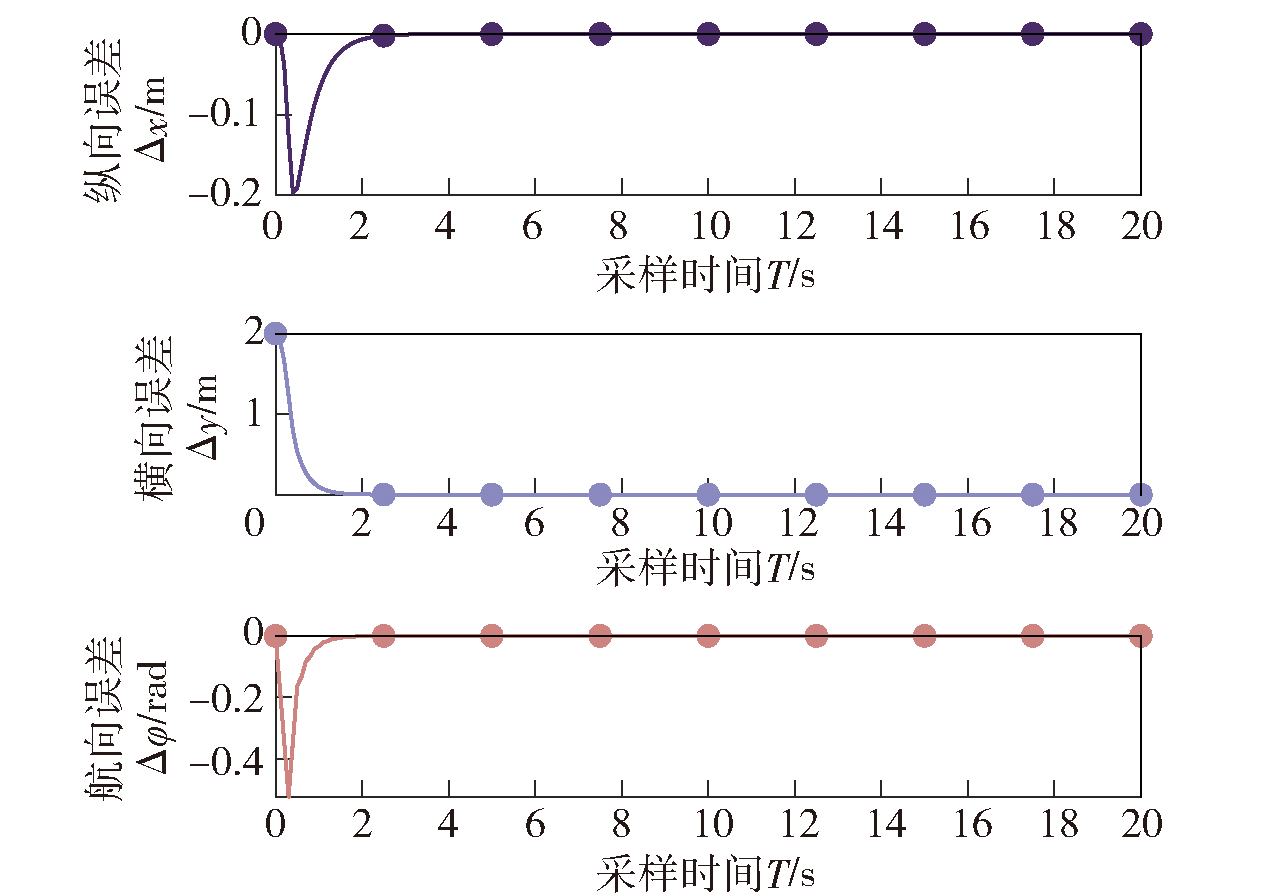
Fig.5 Trajectory tracking error of leader (linear trajectory)
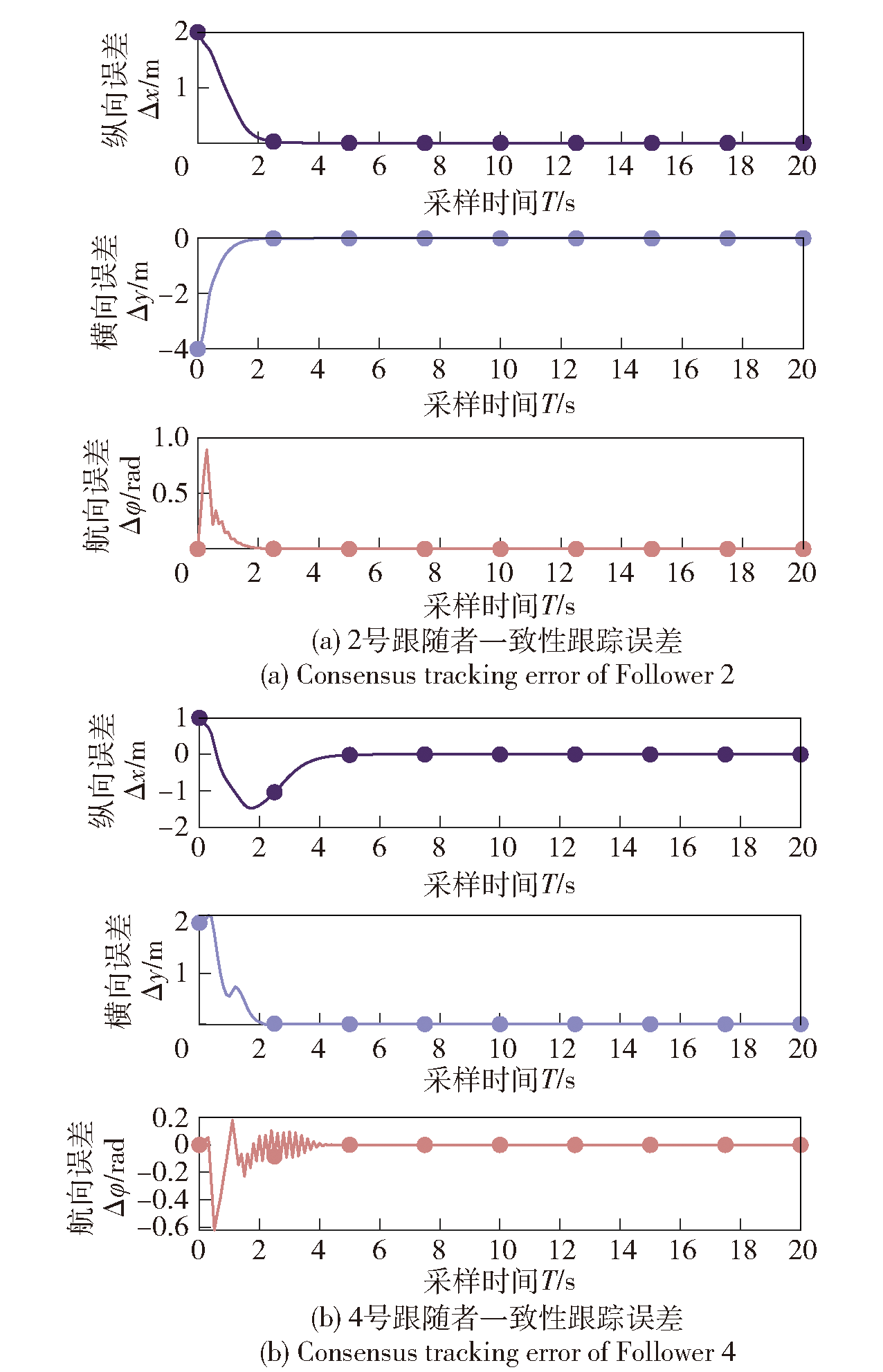
Fig.6 Consensus tracking errors of the followers (linear trajectory)
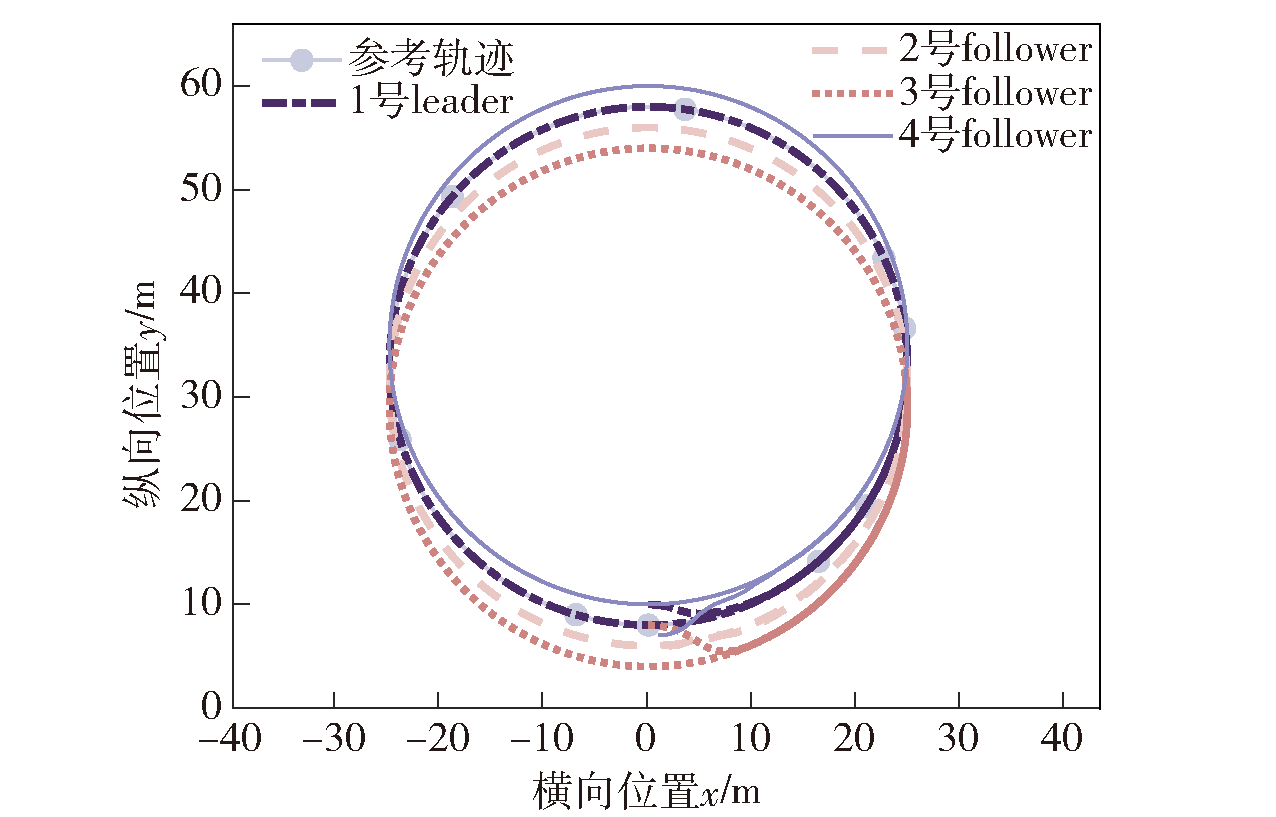
Fig.7 Trajectory tracking result of multi-robot formation control (MPC circular trajectory)
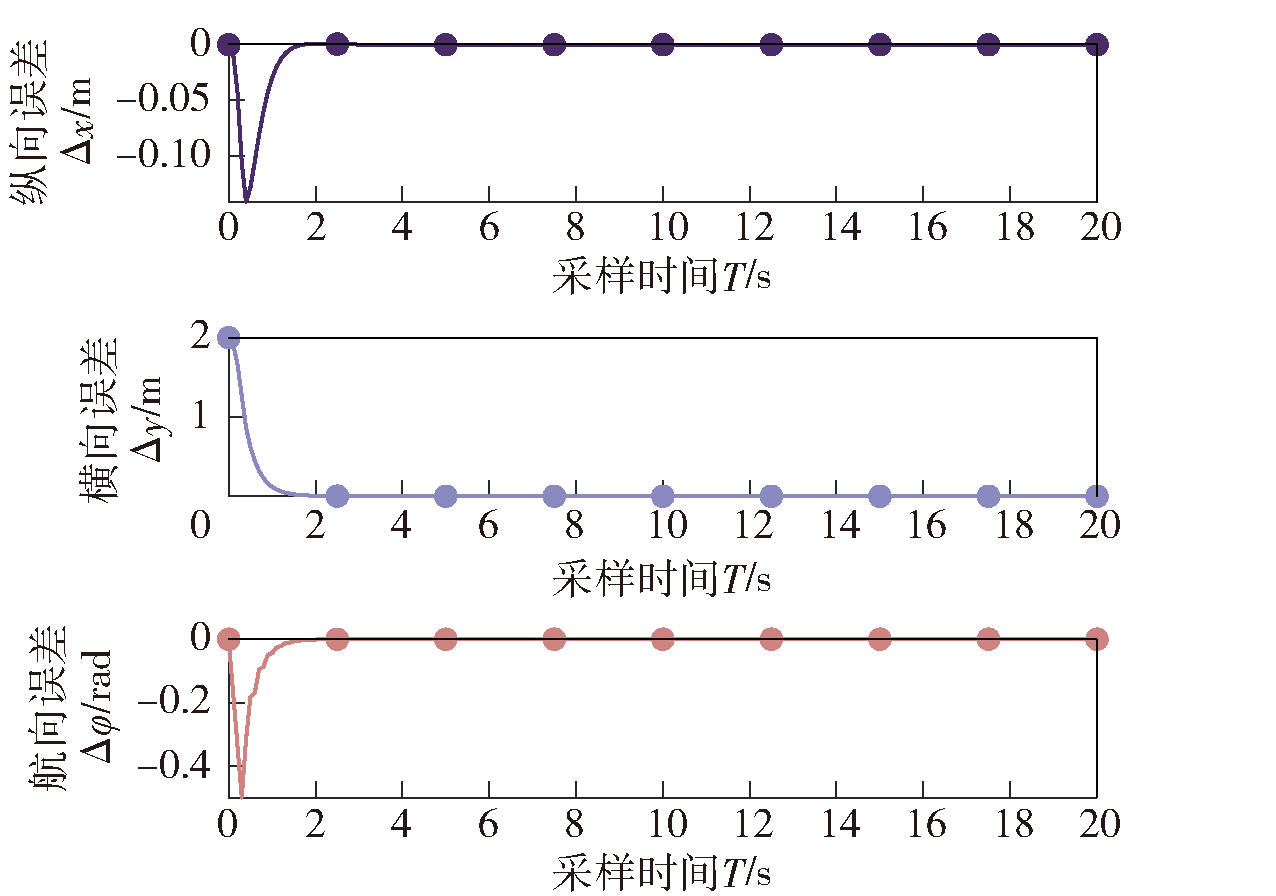
Fig.8 Trajectory tracking error of leader (MPC circular trajectory)
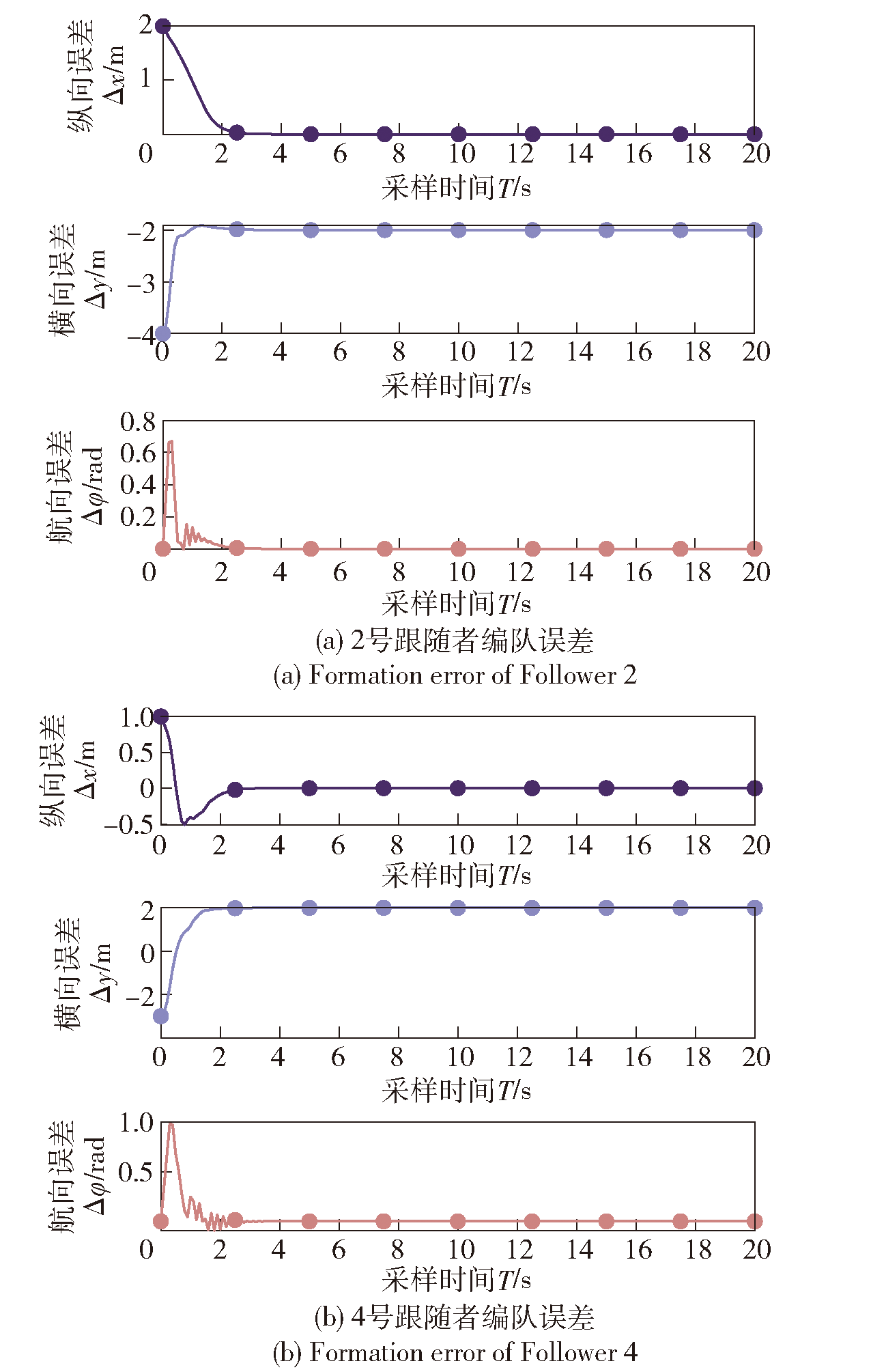
Fig.9 Formation errors of the followers (MPC circular trajectory)
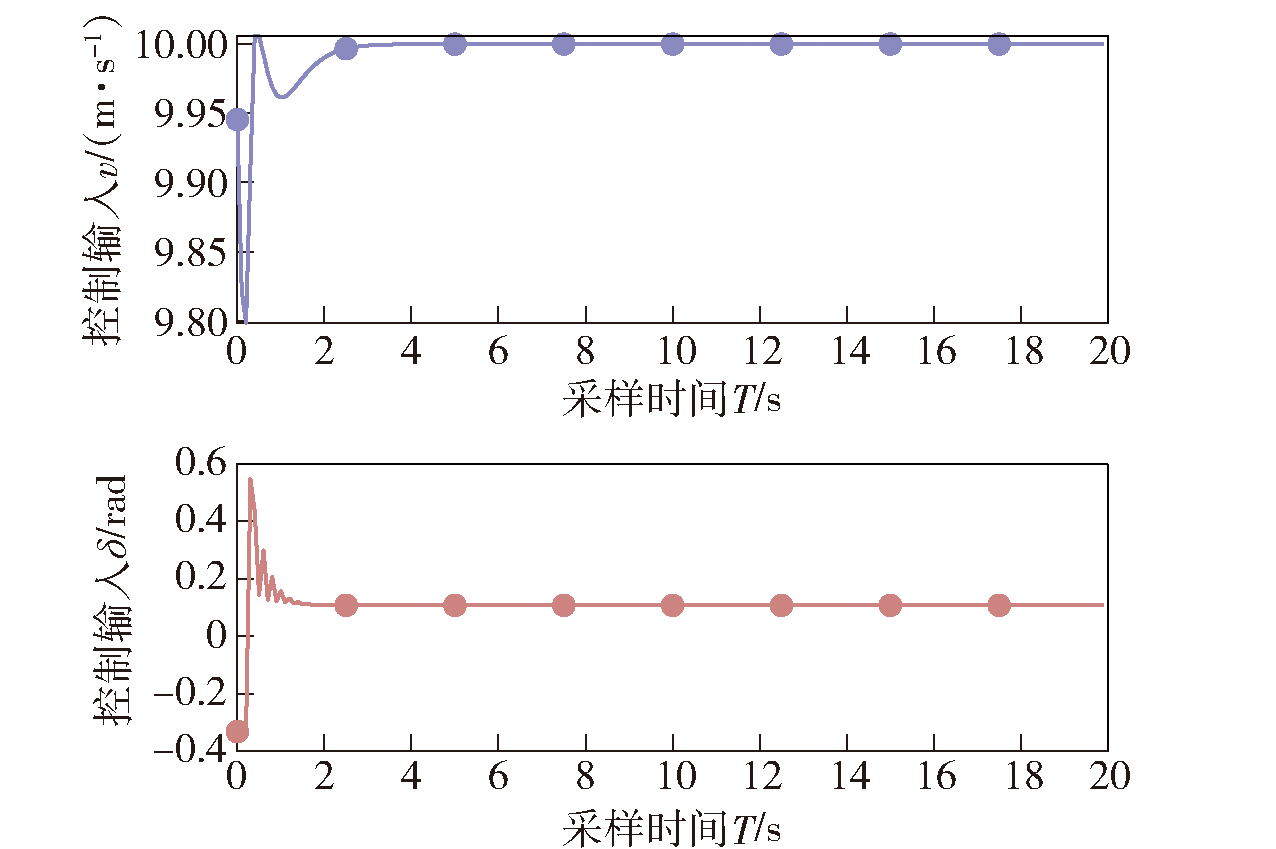
Fig.10 MPC formation control input
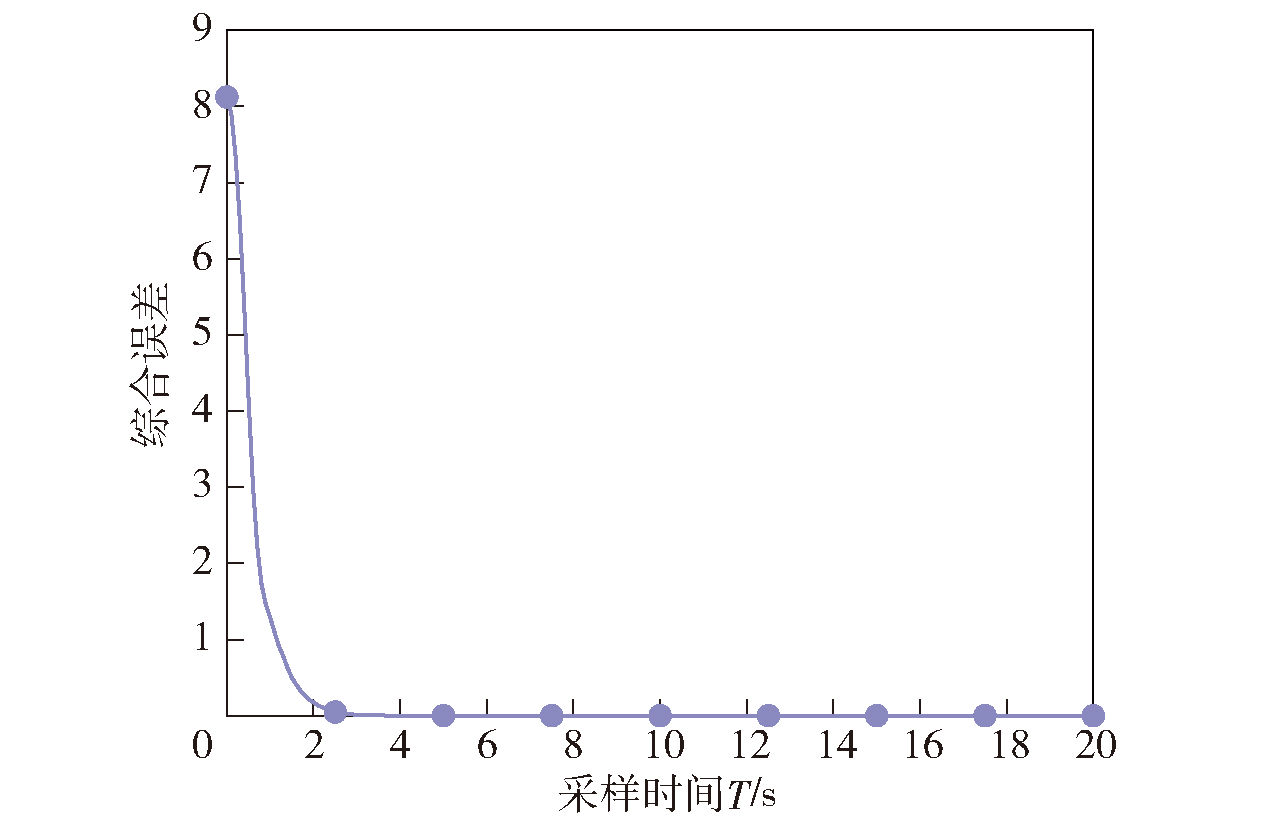
Fig.11 MPC integrated formation error
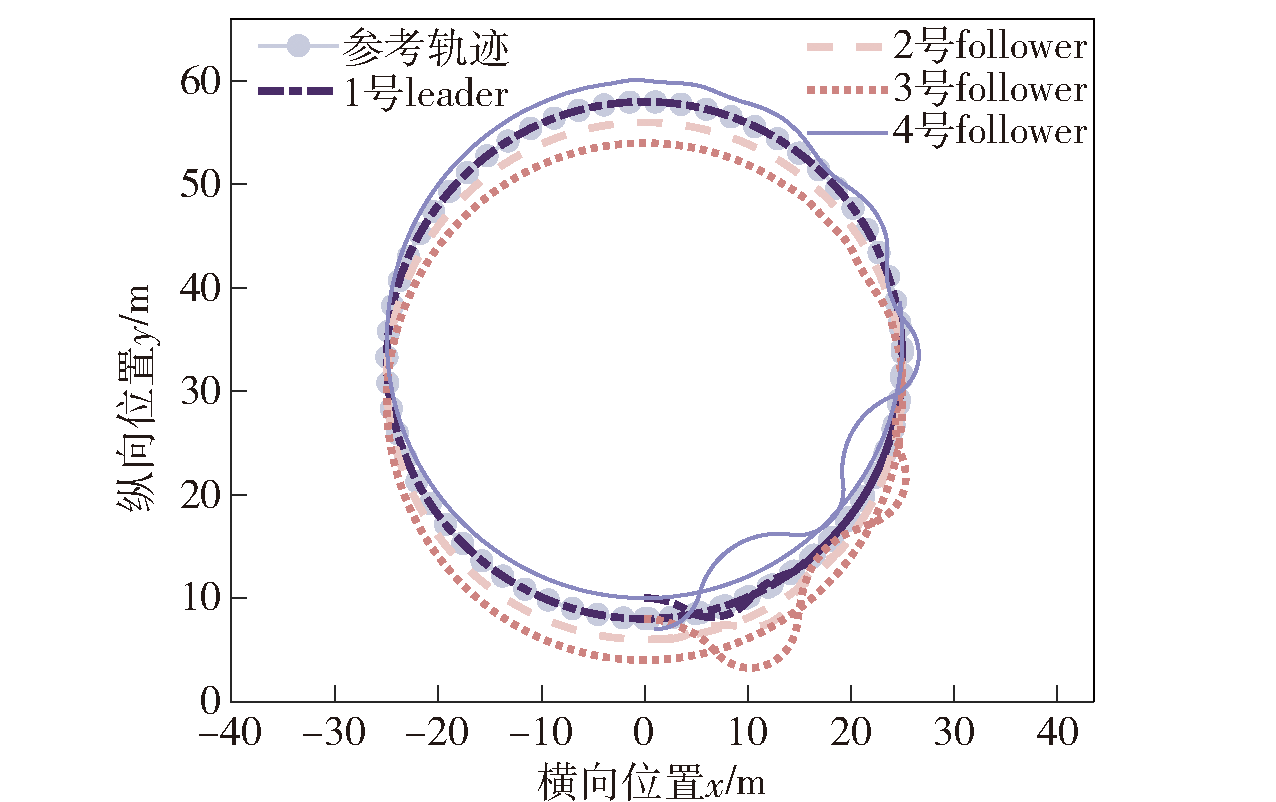
Fig.12 Trajectory tracking result of multi-robot formation control (state feedback circular trajectory)
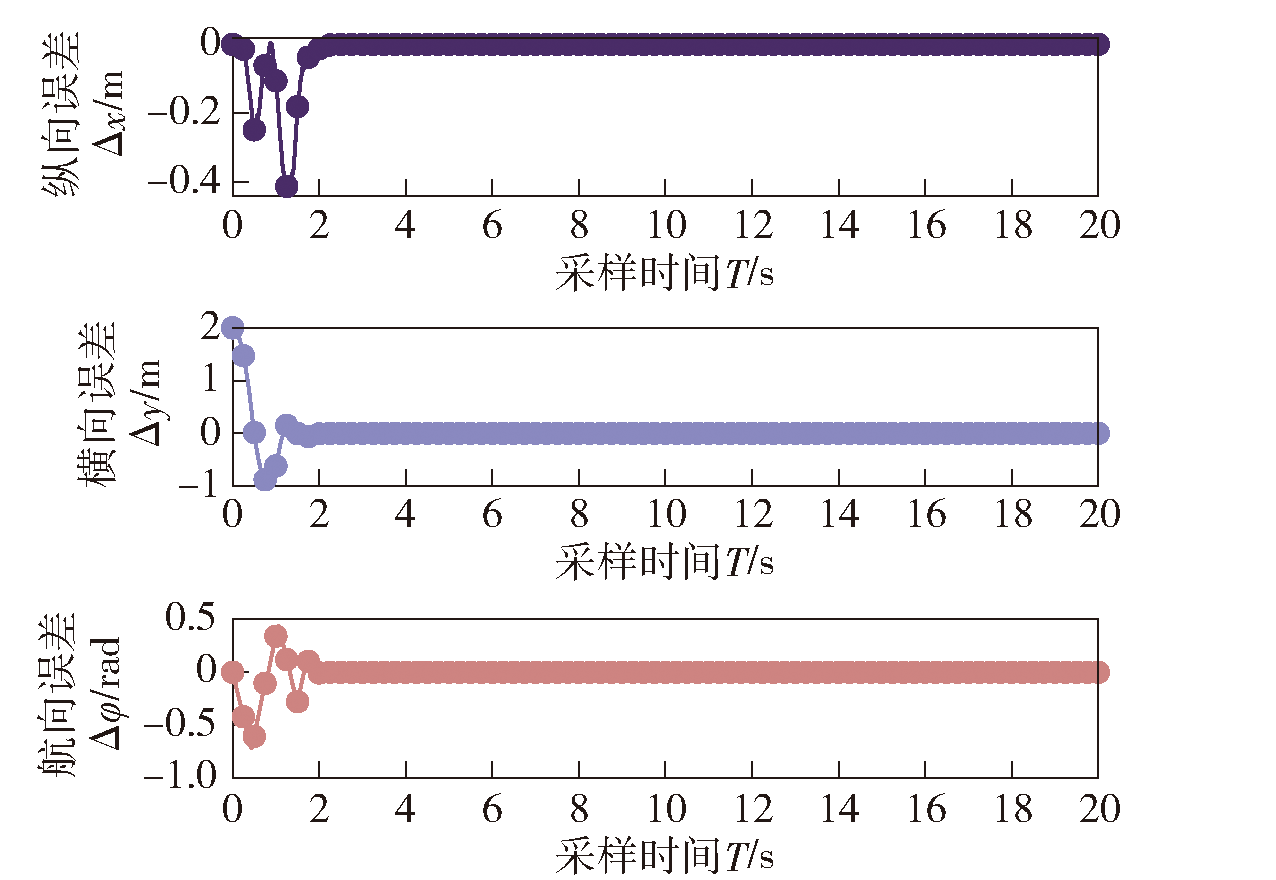
Fig.13 Trajectory tracking error of leader (state feedback circular trajectory)
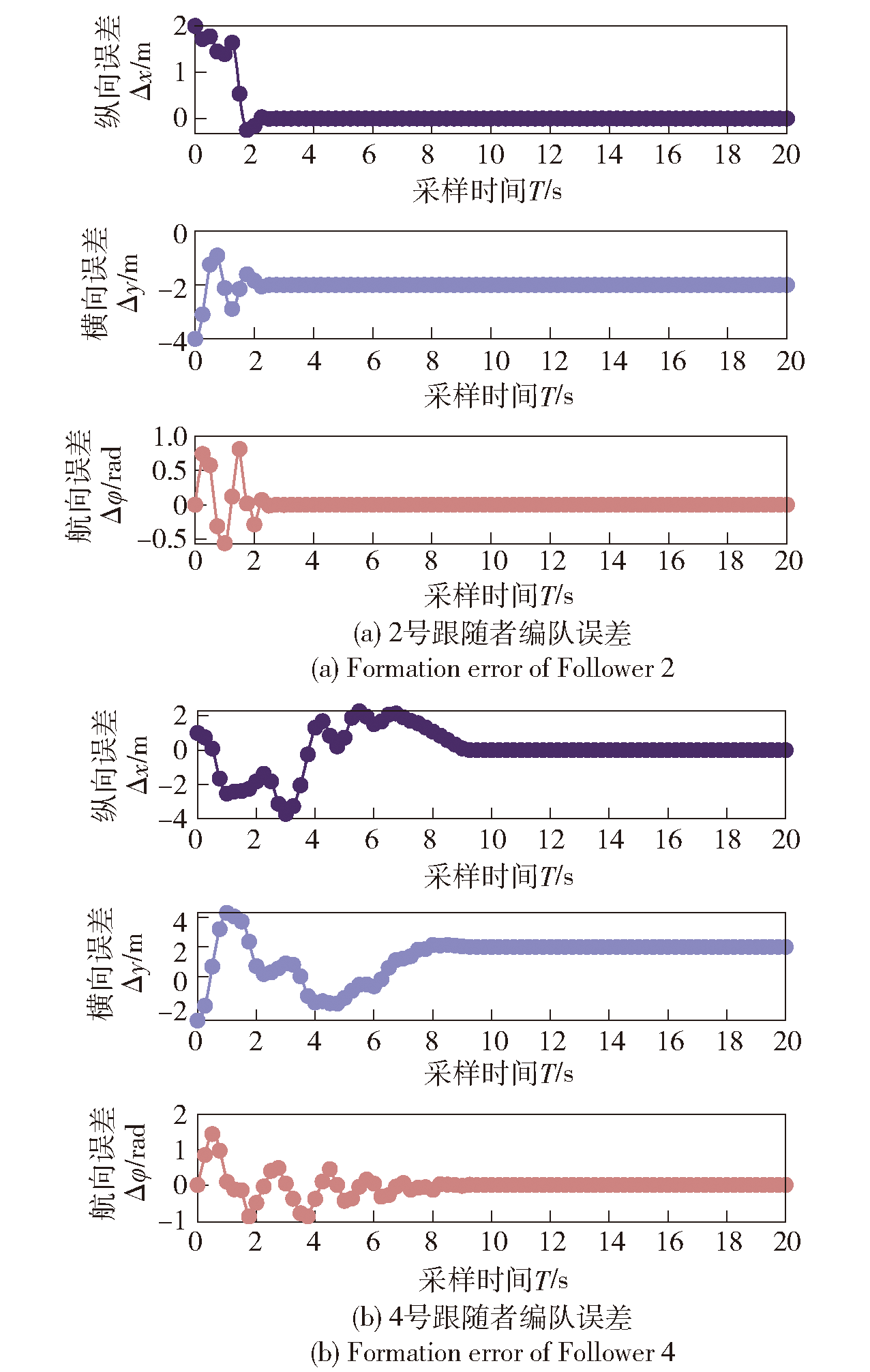
Fig.14 Formation errors of the followers (state feedback circular trajectory)
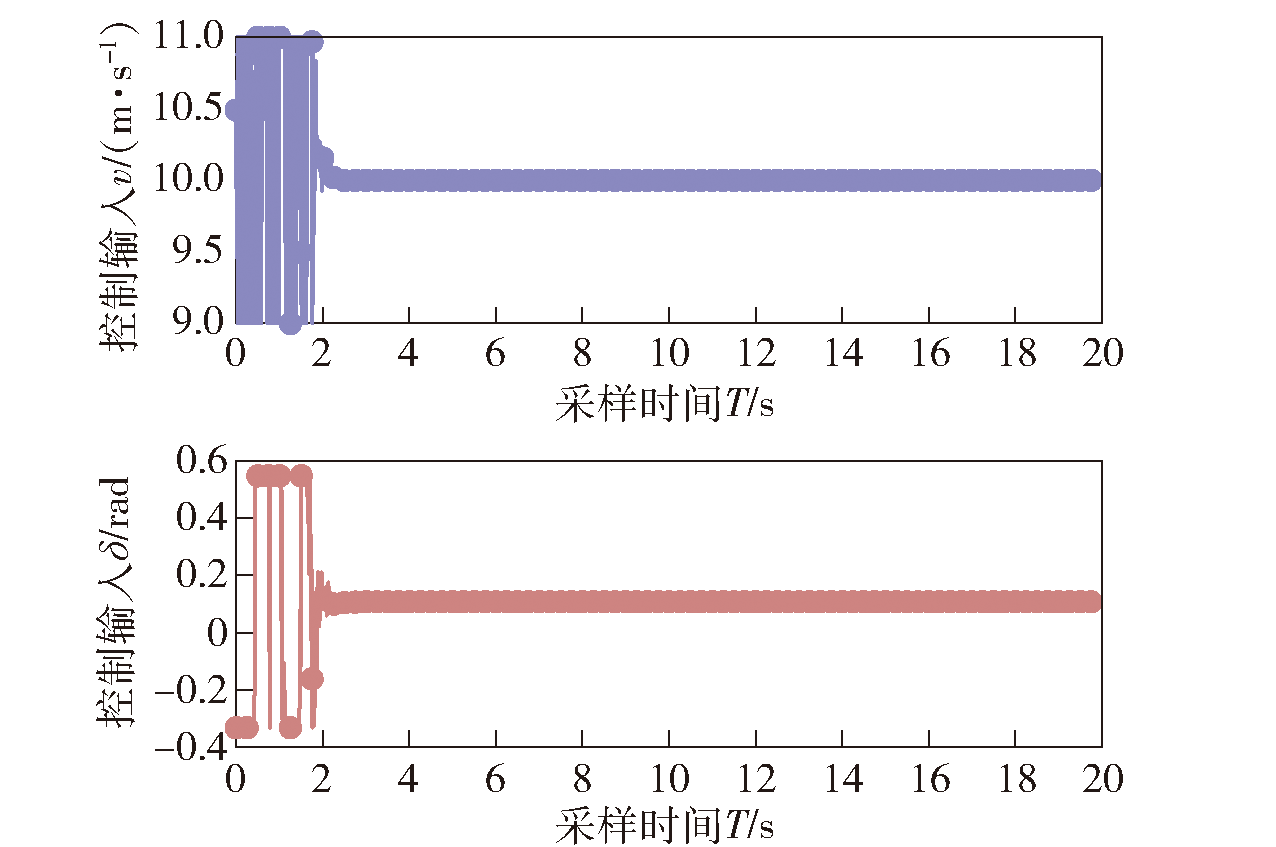
Fig.15 Formation control input of state feedback
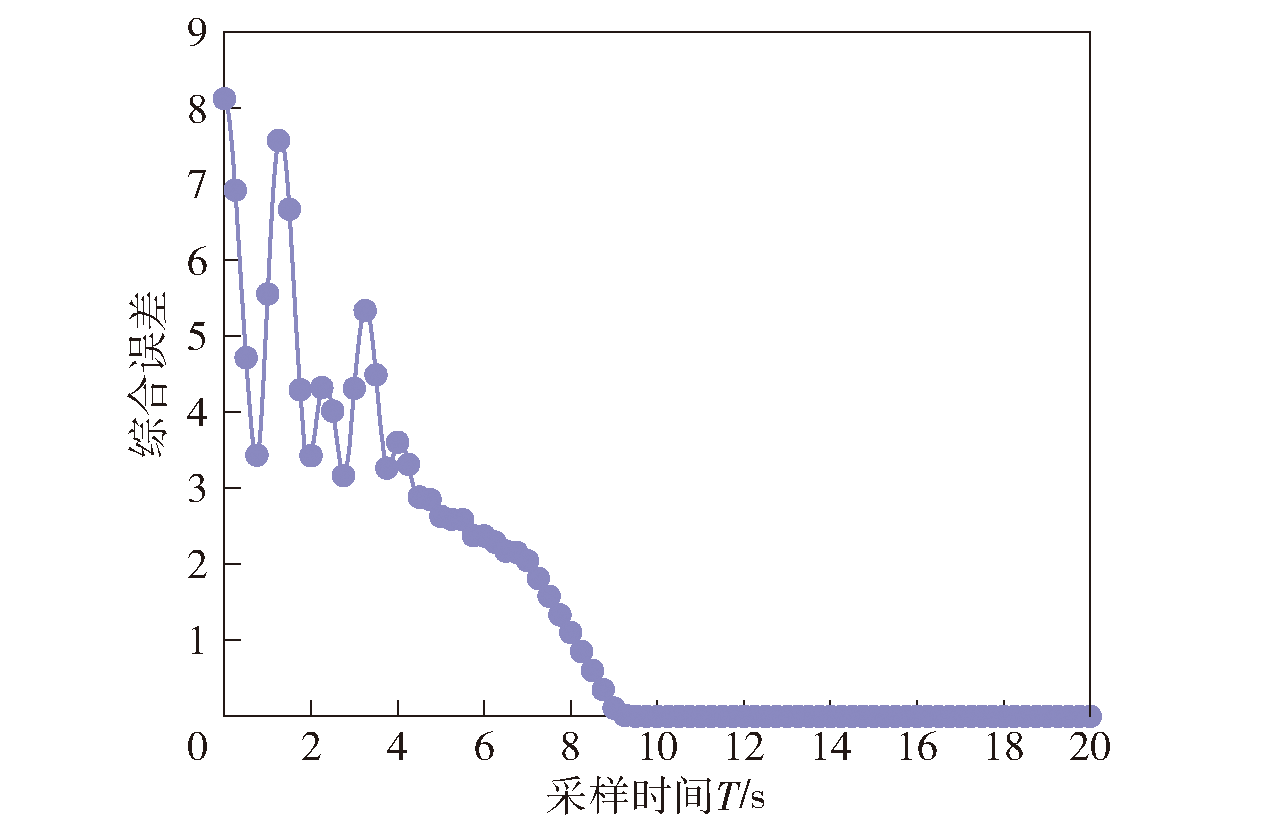
Fig.16 State feedback integrated formation error

Fig.17 Physical simulation of curve trajectory tracking formation control
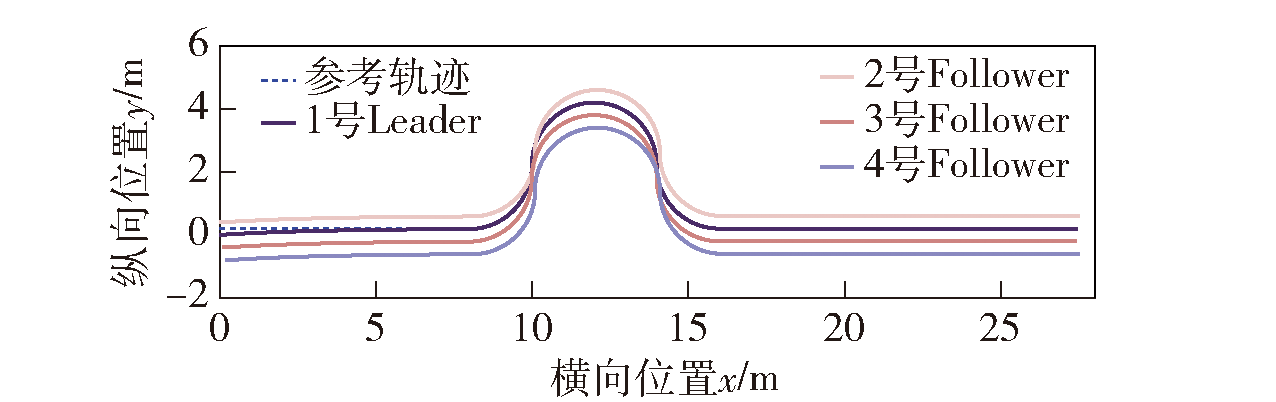
Fig.18 Actual trajectories and reference trajectory of the formation control systems
| [1] |
张志强, 王龙. 多智能体系统的事件驱动控制[J]. 控制理论与应用, 2018, 35(8): 1051-1065.
|
|
|
|
| [2] |
白成超, 王会霞, 郭继峰, 等. 高速飞行器集群通信拓扑自适应控制方法[J]. 宇航学报, 2023, 44(7): 1008-1019.
|
|
|
|
| [3] |
doi: 10.1109/TMECH.2021.3068259 URL |
| [4] |
doi: 10.1016/j.advengsoft.2017.01.002 URL |
| [5] |
doi: 10.1109/TSMC.2019.2926534 URL |
| [6] |
doi: 10.1016/j.oceaneng.2022.113521 URL |
| [7] |
王健安, 闫慧娴, 赵志诚. 事件触发策略下多移动机器人抗干扰固定时间编队控制[J]. 电子学报, 2023, 51(5): 1256-1265.
doi: 10.12263/DZXB.20211610 |
|
|
|
| [8] |
刘泽群, 周军, 郭宗易, 等. 基于领机状态估计的多无人机耦合协同编队控制[J]. 北京理工大学学报, 2023, 43(6): 623-632.
|
|
|
|
| [9] |
doi: 10.1016/j.amc.2018.12.056 URL |
| [10] |
doi: 10.1109/LSP.2016. URL |
| [11] |
郭继峰, 郑红星, 贾涛, 等. 异构无人系统协同作战关键技术综述[J]. 宇航学报, 2020, 41(6): 686-696.
|
|
|
|
| [12] |
doi: 10.1016/j.automatica.2017.07.004 URL |
| [13] |
|
| [14] |
doi: 10.1016/j.automatica.2021.109501 URL |
| [15] |
doi: 10.1109/TLA.2021.9475873 URL |
| [16] |
doi: 10.1007/s11633-020-1264-x |
| [17] |
张令, 段海滨, 雍婷, 等. 基于寒鸦配对交互行为的无人机集群编队控制[J]. 北京航空航天大学学报, 2021, 47(2): 391-397.
|
|
|
|
| [18] |
刘安东, 秦冬冬. 基于虚拟结构法的多移动机器人分布式预测控制[J]. 控制与决策, 2021, 36(5): 1273-1280.
|
|
|
|
| [19] |
doi: 10.1061/(ASCE)AS.1943-5525.0001347 URL |
| [20] |
周俊杰, 史志富. 基于改进领航-跟随法的无人机集群编队飞行控制方法研究[C]//第四届中国航空科学技术大会论文集. 沈阳, 中国: 中航出版传媒有限责任公司,2019: 11.
|
|
|
|
| [21] |
吕永申, 刘力嘉, 杨雪榕, 等. 人工势场与虚拟结构相结合的无人机集群编队控制[J]. 飞行力学, 2019, 37(3): 43-47.
|
|
|
|
| [22] |
崔立堃, 冯绪永, 王承祥. 人工势场和虚拟结构结合的无人车编队及避障研究[J]. 兵器装备工程学报, 2022, 43(9): 304-308.
|
|
|
|
| [23] |
doi: 10.1109/TCSI.2021.3069741 URL |
| [24] |
李睿, 项昌乐, 王超, 等. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6): 1128-1137.
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
| [25] |
doi: 10.1109/TII.2022.3201589 URL |
| [26] |
doi: 10.1109/TNNLS.2015.2490072 pmid: 26540717 |
| [27] |
魏连震, 龚建伟, 陈慧岩, 等. 基于强化学习补偿的地面无人战车行进间跟瞄自适应控制[J]. 兵工学报, 2022, 43(8): 1947-1955.
doi: 10.12382/bgxb.2021.0786 |
|
|
|
| [28] |
张炳力, 佘亚飞. 基于深度强化学习的轨迹跟踪横向控制研究[J]. 合肥工业大学学报(自然科学版), 2023, 46(7): 865-872.
|
|
|
|
| [29] |
doi: 10.1177/0278364913495721 URL |
| [30] |
龚建伟, 刘凯, 齐建永. 无人驾驶车辆模型预测控制[M]. 第2版. 北京: 北京理工大学出版社, 2020: 85-113.
|
|
|
|
| [31] |
|
| [32] |
郭渊博, 李琦, 闵博旭, 等. 基于分布式模型预测控制的欠驱动AUV编队控制[J]. 水下无人系统学报, 2023, 31(3): 405-412.
|
|
|
|
| [33] |
|
| [1] | DING Wengjun, ZHANG Guozong, LIU Haimin, CHAI Yajun, WANG Chiyu, MAO Zhaoyong. Tracking Control of Underactuated Autonomous Underwater Vehicle Formation under Current Disturbance and Communication Delay [J]. Acta Armamentarii, 2024, 45(1): 184-196. |
| [2] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [3] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [4] | XU Peng, ZHAO Jianxin, FAN Wenhui, QIU Tianqi, JIANG Lei, LIANG Zhenjie, LIU Yufei. Specific Complex Locomotion Skills Control for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 135-145. |
| [5] | LU Jiaxing, LIU Haiou, GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong. Trajectory Tracking Control of Unmanned Tracked Vehicles Based on Adaptive Dual-Parameter Optimization [J]. Acta Armamentarii, 2023, 44(4): 960-971. |
| [6] | ZHANG Yuanbo, XIANG Changle, WANG Weida, CHEN Yongdan. A Particle Swarm Optimization and Ant Colony Optimization Fusion Algorithm-based Model Predictve Torque Coordnation Control Strategy for Distributed Electric Drive Vehicle [J]. Acta Armamentarii, 2023, 44(11): 3253-3258. |
| [7] | JIANG Yan, DING Yuyan, ZHANG Xinglong, XU Xin. A Human-machine Collaborative Control Algorithm for Intelligent Vehicles Based on Model Prediction and Policy Learning [J]. Acta Armamentarii, 2023, 44(11): 3465-3477. |
| [8] | PAN Bo, LI Shengfei, WANG Yang, TAN Senqi, ZHANG Naisi, LUO Tian, CUI Xing. Integrated Control Method of Multi-axle Distributed Driving Unmanned Ground Vehicle in Handling Limit [J]. Acta Armamentarii, 2023, 44(11): 3279-3294. |
| [9] | ZHOU Qiu, ZHOU Yue, SUN Hongming, GUO Wei, WU Kai, LAN Yanjun. Path Planning and Tracking Control Method of Deep-Sea Landing Vehicle [J]. Acta Armamentarii, 2023, 44(1): 298-306. |
| [10] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [11] | SONG Jiarui, TAO Gang, LI Derun, ZANG Zheng, WU Shaobin, GONG Jianwei. Robust Model Predictive Control for Manned and Unmanned Vehicle Formation Based on Parameter Self-Optimization [J]. Acta Armamentarii, 2023, 44(1): 84-97. |
| [12] | WANG Bao-yuan, SHAO Xiao-jun, LIU Peng-ke, HENG Gang, CHAO Hong-xiao, LIU Jun. Research on Measuring Method of Nutation Angle of Projectile Based on Trajectory Tracking with High Speed Photography [J]. Acta Armamentarii, 2016, 37(7): 1312-1316. |
| [13] | DONG Zao-peng, WAN Lei, SUN Yu-shan, LIU Tao, LI Yue-ming, ZHANG Guo-cheng. Trajectory Tracking Control of an Underactuated Unmanned Marine Vehicle Based on Asymmetric Model [J]. Acta Armamentarii, 2016, 37(3): 471-481. |
| [14] | LI Zeng-yan, LI Xiao-min, LIU Qiu-sheng. Trajectory Tracking Algorithm for Motion Compensation of Loitering Munition under Wind Environment [J]. Acta Armamentarii, 2016, 37(12): 2377-2384. |
| [15] | XUE Rui-bin, SONG Jian-mei, ZHANG Min-qiang. Research on Distributed Multi-vehicle Coordinated Formation Flight Control with Coupling Time-delay and Jointly-connected Topologies [J]. Acta Armamentarii, 2015, 36(3): 492-502. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||