
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (6): 1588-1601.doi: 10.12382/bgxb.2022.0288
Previous Articles Next Articles
XIA Linlin1,*( ), ZHANG Jingjing1, CHU Yan2, ZHANG Daochang3, SONG Ziwei1, CUI Jiashuo1, LIU Ruimin1
), ZHANG Jingjing1, CHU Yan2, ZHANG Daochang3, SONG Ziwei1, CUI Jiashuo1, LIU Ruimin1
Received:2022-04-22
Online:2023-06-30
Contact:
XIA Linlin
XIA Linlin, ZHANG Jingjing, CHU Yan, ZHANG Daochang, SONG Ziwei, CUI Jiashuo, LIU Ruimin. Progress and Prospects of Polarized Skylight Fused Visual SLAM[J]. Acta Armamentarii, 2023, 44(6): 1588-1601.
Add to citation manager EndNote|Ris|BibTeX
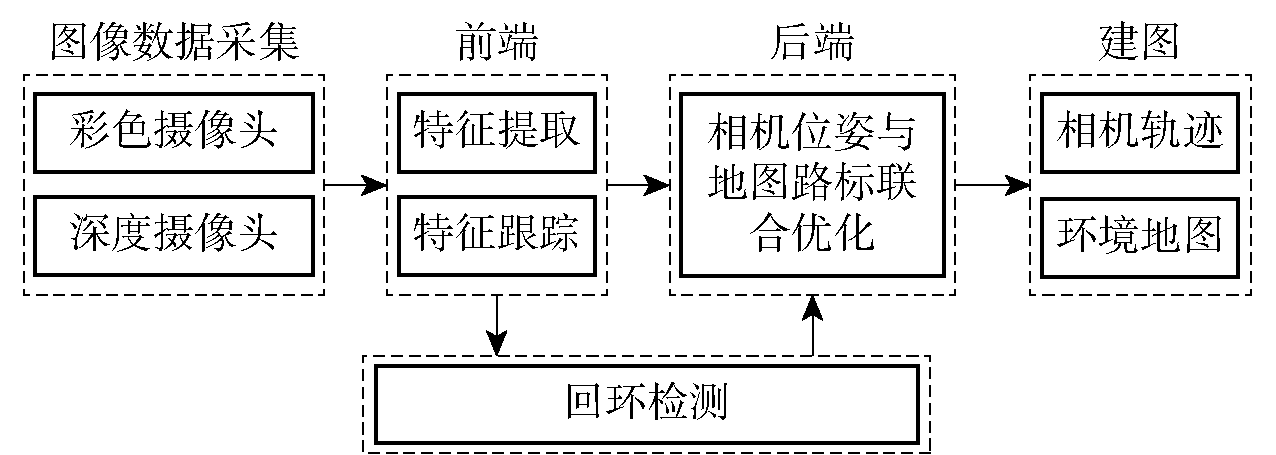
Fig.1 Algorithm framework of typical visual SLAM
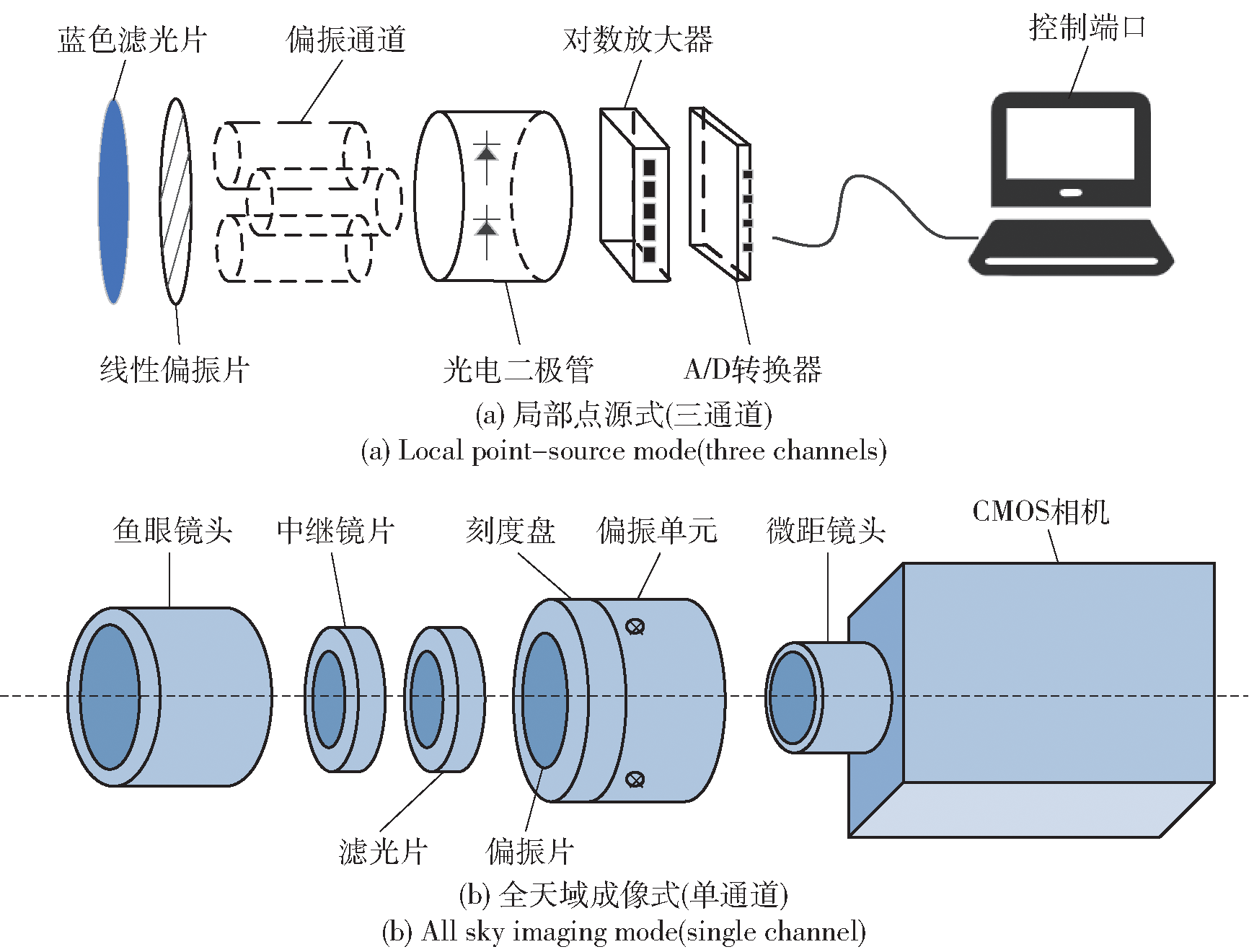
Fig.2 Schematic diagrams of polarization measurement systems
| 模型 | 年份 | 模型名称 | 模型描述 | 来源文献 |
|---|---|---|---|---|
| 1995 | Rayleigh散射模型 | 描述晴朗天气下偏振模式的总体特征;但仅考虑了单次散射,且无法描述天空中的中性点对天空偏振模式的影响 | Bucholtz[ | |
| 2004 | Hannay多次散射模型 | 结合了大气传输模型;将单粒子Rayleigh传输过程推广至多次散射序列 | Hannay[ | |
| 基于Rayleigh散射提出的解析模型 | 2013 | 多次散射下大气偏振模式解析模型 | 从Rayleigh散射模型出发,结合Perez光强分布,考虑大气粒子多次散射特性;构建多次散射下天空偏振光解析模型 | 吴良海等[ |
| 2014 | 月光偏振模式解析模型 | 基于Rayleigh散射,将单个粒子的单次散射从二维空间拓展到三维空间,建立月光偏振模式解析模型;可用于晴朗天气下满月夜间的导航 | 崔岩等[ | |
| 2020 | 波动水面下偏振模式解析模型 | 利用Cox-Munk海浪模型描述波浪水面,建立基于Rayleigh散射、波动水面的折射及水面分子散射的波动水面下偏振模式解析模型 | 褚金奎等[ | |
| 2021 | 等偏振度解析模型 | 基于Rayleigh散射理论,提取偏振度的分布形态特征,建立大气偏振模式的等偏振度特征模型;实测情况下较Rayleigh散射模型更加准确 | 汪先球[ | |
| 1968 | Monte Carlo随机传输模型 | 面向混浊大气下、经多重散射引起的天空偏振光模式不对称问题;模型复杂度极高,难以用于实时导航 | Kattawar等[ | |
| 2004 | Berry奇异值模型 | 对偏振中性点进行描述,分别为Arago,Brewster,Babinet和第四中性点 | Berry等[ | |
| 基于Mie散射提出的解析模型 | 2011 | 矢量辐射传输模型 | 基于Monte Carlo法,将矢量传输方程用于偏振模式分布与物理因素相关性研究;更适用于气溶胶、云团等复杂大气环境 | Buras等[ |
| 2013 | 基于RT3的大气偏振模型 | 基于RT3传输模型,对混浊大气偏振模式进行分析;但对于全天域范围内的混浊大气偏振模式表征仍不适用 | 王威等[ | |
| 2014 | 混浊大气偏振模式解析模型 | 以三维天球大气模型为基础,用Monte Carlo法模拟太阳光在大气中的传输过程,实现对混浊大气偏振全局分布的建模 | 王子谦等[ |
Table 1 Analytical models based on two scattering theories (Rayleigh and Mie)
| 模型 | 年份 | 模型名称 | 模型描述 | 来源文献 |
|---|---|---|---|---|
| 1995 | Rayleigh散射模型 | 描述晴朗天气下偏振模式的总体特征;但仅考虑了单次散射,且无法描述天空中的中性点对天空偏振模式的影响 | Bucholtz[ | |
| 2004 | Hannay多次散射模型 | 结合了大气传输模型;将单粒子Rayleigh传输过程推广至多次散射序列 | Hannay[ | |
| 基于Rayleigh散射提出的解析模型 | 2013 | 多次散射下大气偏振模式解析模型 | 从Rayleigh散射模型出发,结合Perez光强分布,考虑大气粒子多次散射特性;构建多次散射下天空偏振光解析模型 | 吴良海等[ |
| 2014 | 月光偏振模式解析模型 | 基于Rayleigh散射,将单个粒子的单次散射从二维空间拓展到三维空间,建立月光偏振模式解析模型;可用于晴朗天气下满月夜间的导航 | 崔岩等[ | |
| 2020 | 波动水面下偏振模式解析模型 | 利用Cox-Munk海浪模型描述波浪水面,建立基于Rayleigh散射、波动水面的折射及水面分子散射的波动水面下偏振模式解析模型 | 褚金奎等[ | |
| 2021 | 等偏振度解析模型 | 基于Rayleigh散射理论,提取偏振度的分布形态特征,建立大气偏振模式的等偏振度特征模型;实测情况下较Rayleigh散射模型更加准确 | 汪先球[ | |
| 1968 | Monte Carlo随机传输模型 | 面向混浊大气下、经多重散射引起的天空偏振光模式不对称问题;模型复杂度极高,难以用于实时导航 | Kattawar等[ | |
| 2004 | Berry奇异值模型 | 对偏振中性点进行描述,分别为Arago,Brewster,Babinet和第四中性点 | Berry等[ | |
| 基于Mie散射提出的解析模型 | 2011 | 矢量辐射传输模型 | 基于Monte Carlo法,将矢量传输方程用于偏振模式分布与物理因素相关性研究;更适用于气溶胶、云团等复杂大气环境 | Buras等[ |
| 2013 | 基于RT3的大气偏振模型 | 基于RT3传输模型,对混浊大气偏振模式进行分析;但对于全天域范围内的混浊大气偏振模式表征仍不适用 | 王威等[ | |
| 2014 | 混浊大气偏振模式解析模型 | 以三维天球大气模型为基础,用Monte Carlo法模拟太阳光在大气中的传输过程,实现对混浊大气偏振全局分布的建模 | 王子谦等[ |

Fig.3 Rayleigh model in 3D view (sun altitude =30°)

Fig.4 Berry model in 3D view
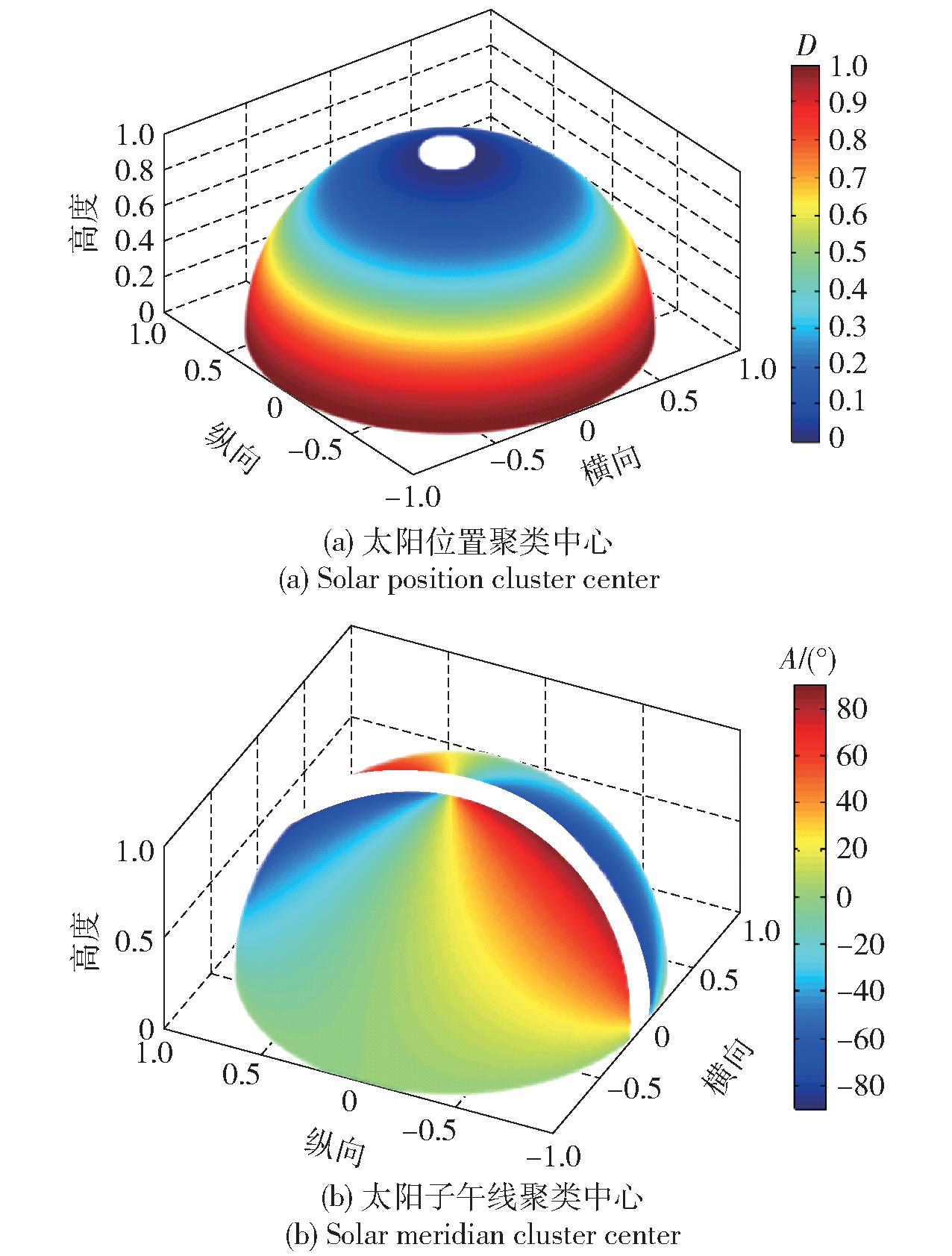
Fig.5 Theoretical clustering results
| 类别 | 年份 | 相机类型 | 融合策略 | 模型描述 | 载体 | 位置定位精度 | 来源文献 |
|---|---|---|---|---|---|---|---|
| 偏振罗盘输出 | 2016 | 双目 | EKF | MEMS IMU遵循惯性解算;偏振罗盘直接输出载体偏航信息;单目VO提供连续帧位姿观测 | 车辆 | 3D RMSE为4.3m(道路环境) | Kong等[ |
| 2016 | 双目 | IEKF+拓扑图 节点递推 | 偏振定向辅助远/近特征点的双目视觉/微惯性组合IEKF;以图节点导航信息扩展&场景识别实现图节点递推 | 车辆 | 3D RMSE<12.0m(道路环境) | Xian等[ | |
| 2017 | 单目 | EKF | 偏振罗盘集成至VINS;IMU遵循惯性解算,单目VO提供相对位姿;基于IMU输出的姿态,偏振提供平台航向 | 车辆 | RMSE为25.9m(行驶距离的1.03%) | Wang等[ | |
| 偏振成像观测 | 2018 | 单目 | Kalman滤波 | IMU遵循惯性解算;偏振光传感器提供定向约束;单目相机提供几何地图,并为整机提供位置约束 | 车辆 | RMSE为2.04m(行驶距离的0.01%) | Fan等[ |
| 2021 | 单目 | AKF | 像素化偏振视觉与VINS集成;利用偏振成像和VINS水平姿态角进行偏振定向解算 | 无人车 | RMSE为0.64m (校园环境) | Zhou等[ | |
| 2022 | 双目 | 图优化 | 将基于Berry模型的偏振观测集成至VINS-Fusion;以偏振角作为图模型节点的新增属性,以航向误差编码约束边 | Bulldog-CX 机器人 | RMSE<0.28m (校园环境) | Xia等[ |
Table 2 Polarized skylight-aided visual-inertial solutions
| 类别 | 年份 | 相机类型 | 融合策略 | 模型描述 | 载体 | 位置定位精度 | 来源文献 |
|---|---|---|---|---|---|---|---|
| 偏振罗盘输出 | 2016 | 双目 | EKF | MEMS IMU遵循惯性解算;偏振罗盘直接输出载体偏航信息;单目VO提供连续帧位姿观测 | 车辆 | 3D RMSE为4.3m(道路环境) | Kong等[ |
| 2016 | 双目 | IEKF+拓扑图 节点递推 | 偏振定向辅助远/近特征点的双目视觉/微惯性组合IEKF;以图节点导航信息扩展&场景识别实现图节点递推 | 车辆 | 3D RMSE<12.0m(道路环境) | Xian等[ | |
| 2017 | 单目 | EKF | 偏振罗盘集成至VINS;IMU遵循惯性解算,单目VO提供相对位姿;基于IMU输出的姿态,偏振提供平台航向 | 车辆 | RMSE为25.9m(行驶距离的1.03%) | Wang等[ | |
| 偏振成像观测 | 2018 | 单目 | Kalman滤波 | IMU遵循惯性解算;偏振光传感器提供定向约束;单目相机提供几何地图,并为整机提供位置约束 | 车辆 | RMSE为2.04m(行驶距离的0.01%) | Fan等[ |
| 2021 | 单目 | AKF | 像素化偏振视觉与VINS集成;利用偏振成像和VINS水平姿态角进行偏振定向解算 | 无人车 | RMSE为0.64m (校园环境) | Zhou等[ | |
| 2022 | 双目 | 图优化 | 将基于Berry模型的偏振观测集成至VINS-Fusion;以偏振角作为图模型节点的新增属性,以航向误差编码约束边 | Bulldog-CX 机器人 | RMSE<0.28m (校园环境) | Xia等[ |
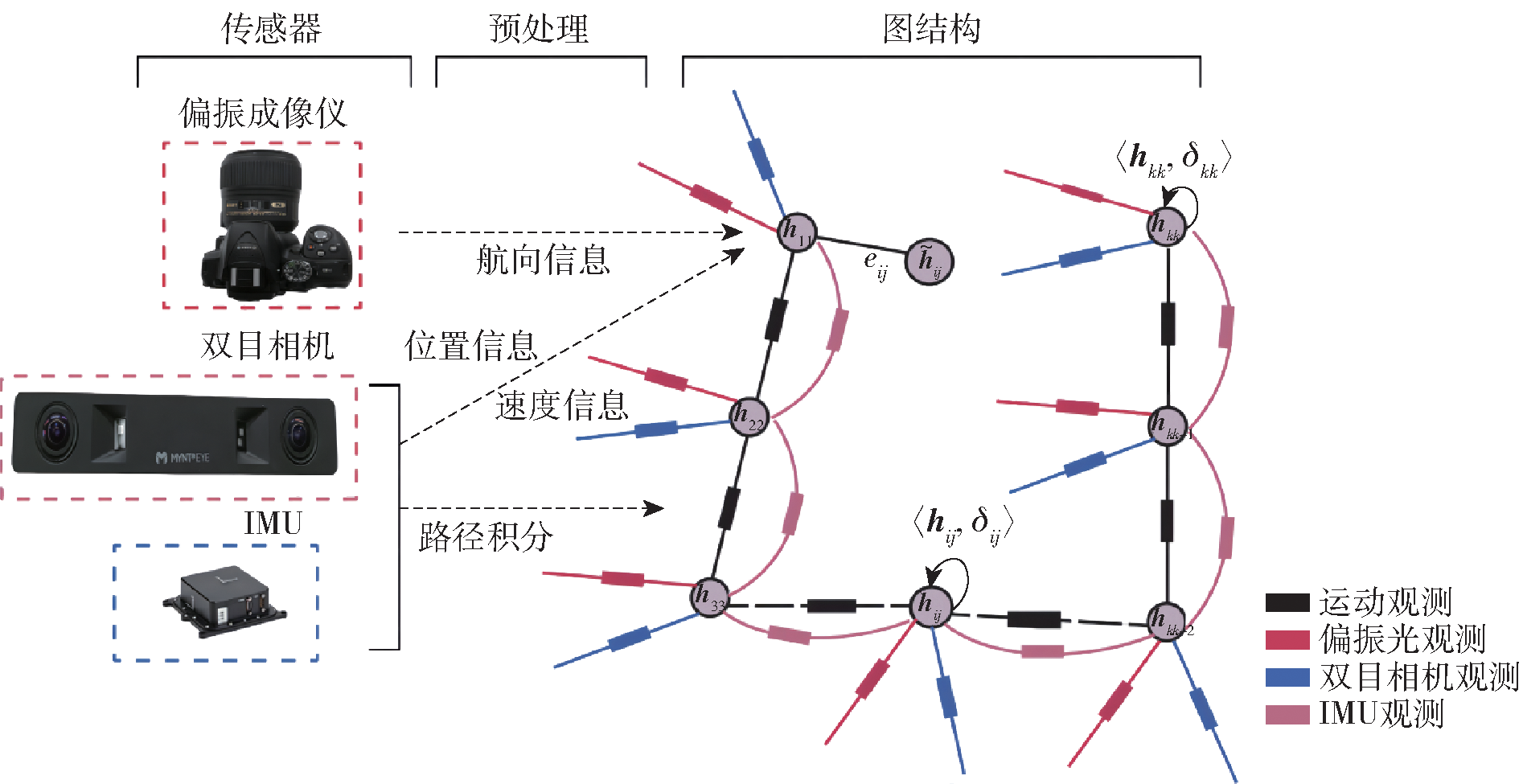
Fig.6 Graph optimization model for polarized light-aided VINS-Fusion

Fig.7 Bulldog-CX robot experiment system
| 类别 | 年份 | 传感器类型 | 融合策略 | 载体 | 来源文献 |
|---|---|---|---|---|---|
| 2020 | 偏振传感器+激光雷达+轮式里程计 | EKF/UKF/PF | Kobuki机器人 | Du等[ | |
| 偏振罗盘输出 | 2020 | 偏振传感器+SINS | Kalman滤波 | 水平基座 | Du等[ |
| 2020 | 偏振传感器+MEMS IMU+GPS | EKF | 四旋翼飞行器 | 褚金奎等[ | |
| 2021 | 偏振传感器+双目相机 | 图优化 | 车辆 | 褚金奎等[ | |
| 2020 | 偏振光+INS+光流传感器 | UKF | 六足机器人 | 曾云豪等[ | |
| 2020 | 偏振光+MEMS IMU | EKF | 车辆 | 范晨等[ | |
| 偏振成像观测 | 2019 | 偏振光+MEMS IMU+地磁 | Kalman滤波 | 车辆 | He等[ |
| 2019 | 偏振光+MEMS IMU+GNSS | Kalman滤波 | 车辆 | He等[ | |
| 2020 | 偏振光+MEMS IMU+地磁+GNSS | Sage-Husa Kalman滤波 | 车辆 | Yuan等[ | |
| 2022 | 偏振光+SINS+地磁+BDS | 联邦Kalman滤波 | 车辆 | 马伟等[ |
Table 3 Other navigation solutions aided by polarized skylight
| 类别 | 年份 | 传感器类型 | 融合策略 | 载体 | 来源文献 |
|---|---|---|---|---|---|
| 2020 | 偏振传感器+激光雷达+轮式里程计 | EKF/UKF/PF | Kobuki机器人 | Du等[ | |
| 偏振罗盘输出 | 2020 | 偏振传感器+SINS | Kalman滤波 | 水平基座 | Du等[ |
| 2020 | 偏振传感器+MEMS IMU+GPS | EKF | 四旋翼飞行器 | 褚金奎等[ | |
| 2021 | 偏振传感器+双目相机 | 图优化 | 车辆 | 褚金奎等[ | |
| 2020 | 偏振光+INS+光流传感器 | UKF | 六足机器人 | 曾云豪等[ | |
| 2020 | 偏振光+MEMS IMU | EKF | 车辆 | 范晨等[ | |
| 偏振成像观测 | 2019 | 偏振光+MEMS IMU+地磁 | Kalman滤波 | 车辆 | He等[ |
| 2019 | 偏振光+MEMS IMU+GNSS | Kalman滤波 | 车辆 | He等[ | |
| 2020 | 偏振光+MEMS IMU+地磁+GNSS | Sage-Husa Kalman滤波 | 车辆 | Yuan等[ | |
| 2022 | 偏振光+SINS+地磁+BDS | 联邦Kalman滤波 | 车辆 | 马伟等[ |
| [1] |
doi: 10.1177/027836498600500404 URL |
| [2] |
刘全攀, 王正杰, 王寰. 基于双目视觉-惯性导航的轻型无人机导航算法[J]. 兵工学报, 2020, 41(增刊2): 242-248.
|
|
|
|
| [3] |
王金科, 左星星, 赵祥瑞, 等. 多源融合SLAM的现状与挑战[J]. 中国图象图形学报, 2022, 27(2): 368-389.
|
|
|
|
| [4] |
|
| [5] |
doi: 10.1002/tee.2018.13.issue-3 URL |
| [6] |
常宜峰, 种洋, 柴洪洲, 等. 世界地磁场模型精度评价[J]. 武汉大学学报(信息科学版), 2016, 41(10): 1398-1403.
|
|
|
|
| [7] |
doi: 10.1109/TRO.2021.3075644 URL |
| [8] |
|
| [9] |
doi: 10.1109/TPAMI.2017.2658577 pmid: 28422651 |
| [10] |
|
| [11] |
doi: 10.1109/TRO.8860 URL |
| [12] |
夏琳琳, 蒙跃, 王策, 等. 基于Retinex理论的稀疏直接法VSLAM三维重建[J]. 中国惯性技术学报, 2021, 29(2): 147-153.
|
|
|
|
| [13] |
|
| [14] |
刘忠泽, 陈慧岩, 崔星, 等. 无人平台越野环境下同步定位与地图创建[J]. 兵工学报, 2019, 40(12): 2399-2406.
doi: 10.3969/j.issn.1000-1093.2019.12.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.12.002 |
|
| [15] |
龙霄潇, 程新景, 朱昊, 等. 三维视觉前沿进展[J]. 中国图象图形学报, 2021, 26(6): 1389-1428.
|
|
|
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
doi: 10.1177/0278364914554813 URL |
| [20] |
doi: 10.1109/TRO.8860 URL |
| [21] |
|
| [22] |
|
| [23] |
曹力科, 肖晓辉. 基于卷帘快门RGB-D相机的视觉惯性SLAM方法[J]. 机器人, 2021, 43(2): 193-202.
doi: 10.13973/j.cnki.robot.200245 |
|
doi: 10.13973/j.cnki.robot.200245 |
|
| [24] |
doi: 10.1016/j.isprsjprs.2021.06.009 URL |
| [25] |
|
| [26] |
doi: 10.1109/LSP.2016. URL |
| [27] |
|
| [28] |
|
| [29] |
doi: 10.3389/frobt.2020.00068 URL |
| [30] |
|
| [31] |
|
| [32] |
doi: 10.1109/LSP.2016. URL |
| [33] |
|
| [34] |
doi: 10.1109/TRO.2021.3133730 URL |
| [35] |
|
| [36] |
doi: 10.3390/rs11060610 URL |
| [37] |
doi: 10.3390/s20164386 URL |
| [38] |
|
| [39] |
doi: 10.1007/s10514-019-09874-z |
| [40] |
|
| [41] |
彭富清. 海洋重力辅助导航方法及应用[D]. 郑州: 战略支援部队信息工程大学, 2009.
|
|
|
|
| [42] |
褚金奎, 张然, 王志文, 等. 仿生偏振光导航传感器研究进展[J]. 科学通报, 2016, 61(23): 2568-2577.
|
|
|
|
| [43] |
高隽, 范之国. 仿生偏振光导航方法[M]. 北京: 科学出版社, 2014.
|
|
|
|
| [44] |
褚金奎, 张钟元, 张然, 等. 仿生偏振探测技术及导航传感器应用[J]. 计测技术, 2021, 41(5): 23-33.
|
|
|
|
| [45] |
doi: 10.1364/OE.26.028589 pmid: 30470033 |
| [46] |
doi: 10.1007/BF02174424 pmid: 18126348 |
| [47] |
doi: 10.1038/331435a0 |
| [48] |
|
| [49] |
|
| [50] |
doi: 10.1016/j.cub.2003.12.034 URL |
| [51] |
蔡宇. 微阵列式光罗盘误差建模与补偿[D]. 长沙: 国防科技大学, 2018.
|
|
|
|
| [52] |
doi: 10.1177/105971239700600104 URL |
| [53] |
|
| [54] |
doi: 10.1109/JSEN.2010.2078806 URL |
| [55] |
|
| [56] |
|
| [57] |
褚金奎, 关传泷, 刘泽, 等. 一种高度集成化的仿生偏振导航传感器[J]. 微纳电子技术, 2020, 57(3): 193-197.
|
|
|
|
| [58] |
doi: 10.1109/JSEN.2016.2533628 URL |
| [59] |
韩国良, 胡小平, 何晓峰, 等. 基于像素化偏振芯片的仿生偏振光罗盘技术[J]. 导航定位与授时, 2020, 7(4): 19-25.
|
|
|
|
| [60] |
白杨, 赵开春, 尤政. 分焦平面偏振图像传感器偏振主轴方向的标定[J]. 光学精密工程, 2022, 30(1): 31-37.
|
|
doi: 10.37188/OPE.20223001.0031 URL |
|
| [61] |
韩勇, 赵开春, 尤政. 快速旋转式偏振成像探测装置的设计[J]. 光学精密工程, 2018, 26(10): 2345-2354.
|
|
doi: 10.3788/OPE. URL |
|
| [62] |
doi: 10.1080/01431161.2020.1743529 URL |
| [63] |
杨中光. 基于自然偏振特性的卫星自主导航技术研究[D]. 西安: 西北工业大学, 2018.
|
|
|
|
| [64] |
钟振兴, 马晓波, 安巍. 基于地基云图与气象数据的辐照度轻量化预测[J]. 东北电力大学学报, 2021, 41(1): 24-30.
|
|
|
|
| [65] |
doi: 10.1364/AO.34.002765 pmid: 21052423 |
| [66] |
doi: 10.1088/1367-2630/6/1/197 URL |
| [67] |
吴良海, 张骏, 范之国, 等. 多次散射因素影响下天空偏振光模式的解析模型[J]. 物理学报, 2014, 63(11): 218-225.
|
|
|
|
| [68] |
崔岩, 陈小龙, 褚金奎, 等. 晴朗天气下满月偏振模式的研究[J]. 光学学报, 2014, 34(10): 147-155.
|
|
|
|
| [69] |
褚金奎, 田连标, 成昊远, 等. 天空光主导的波浪水面下偏振分布模型仿真[J]. 光学学报, 2020, 40(20): 18-25.
|
|
|
|
| [70] |
汪先球. 大气偏振模式的显著特征分析与建模方法研究[D]. 合肥: 合肥工业大学, 2021.
|
|
|
|
| [71] |
doi: 10.1364/AO.7.001519 pmid: 20068833 |
| [72] |
doi: 10.1088/1367-2630/6/1/162 URL |
| [73] |
|
| [74] |
王威, 褚金奎, 崔岩, 等. 基于矢量辐射传输的大气偏振建模[J]. 中国激光, 2013, 40(5): 220-226.
|
|
|
|
| [75] |
王子谦, 张旭东, 金海红, 等. 基于Monte Carlo方法的混浊大气偏振模式全天域建模[J]. 中国激光, 2014, 41(10): 219-227.
|
|
|
|
| [76] |
蒋睿, 王霞, 左一凡, 等. 基于局部大气偏振特性的仿生导航方法[J]. 航空学报, 2020, 30(增刊2): 724293.
|
|
|
|
| [77] |
田柳, 高隽, 范之国, 等. 基于大气偏振模式分布规律的导航方向角计算方法[J]. 电子学报, 2012, 40(1): 141-146.
doi: 10.3969/j.issn.0372-2112.2012.01.023 |
|
doi: 10.3969/j.issn.0372-2112.2012.01.023 |
|
| [78] |
崔岩, 周鑫昌, 刘亚飞, 等. 基于Hough变换的太阳子午线提取方法[J]. 光学学报, 2020, 40(17): 14-20.
|
|
|
|
| [79] |
任建斌. 仿生偏振光导航中信息获取及姿态解算方法研究[D]. 太原: 中北大学, 2015.
|
|
|
|
| [80] |
赵成帅, 吴新冬, 赵东花, 等. 一种基于改进太阳子午线拟合方法的仿生偏振光定向系统[J]. 导航定位与授时, 2021, 8(4): 68-74.
|
|
|
|
| [81] |
褚金奎, 关乐, 李世奇, 等. 大气偏振模式图分布及仿生偏振导航技术[J]. 遥感学报, 2018, 22(6): 969-679.
|
|
|
|
| [82] |
doi: 10.1108/IR-03-2016-0103 URL |
| [83] |
|
| [84] |
doi: 10.1109/JSEN.2017.2725938 URL |
| [85] |
doi: 10.1109/JSEN.2017.2786294 URL |
| [86] |
doi: 10.1109/JSEN.2021.3066844 URL |
| [87] |
doi: 10.1088/1361-6501/ac4637 |
| [88] |
李昊天, 张宇. 改进的D-S证据推理地图匹配算法[J]. 东北电力大学学报, 2020, 40(1): 90-96.
|
|
|
|
| [89] |
张少将. 基于多传感器信息融合的智能车定位导航系统研究[D]. 哈尔滨: 哈尔滨工业大学, 2020.
|
|
|
|
| [90] |
张子茜, 熊再立, 张彪, 等. 基于超分辨率重建技术的遥感图像小目标检测[J]. 东北电力大学学报, 2022, 42(2): 33-40.
|
|
|
|
| [91] |
doi: 10.1049/rsn2.v14.12 URL |
| [92] |
doi: 10.1109/JSEN.7361 URL |
| [93] |
褚金奎, 陈建华, 李金山, 等. 一种偏振光/双目视觉仿生组合导航方法[J]. 光子学报, 2021, 50(5): 192-201.
|
|
doi: 10.3788/gzxb URL |
|
| [94] |
褚金奎, 武进, 李金山, 等. 偏振光传感器在四旋翼飞行器中的应用[J]. 电子学报, 2020, 48(1): 198-203.
doi: 10.3969/j.issn.0372-2112.2020.01.024 |
|
|
|
| [95] |
曾云豪, 杜涛, 星艳. 基于惯性/偏振光/光流的六足步行机器人自主导航方法研究[J]. 导航定位与授时, 2020, 7(6): 102-108.
|
|
|
|
| [96] |
范晨, 何晓峰, 范颖, 等. 基于微惯性/偏振视觉的组合定向方法[J]. 中国惯性技术学报, 2020, 28(2): 231-236.
|
|
|
|
| [97] |
doi: 10.1109/Access.6287639 URL |
| [98] |
|
| [99] |
|
| [100] |
马伟, 李沅, 康健, 等. 基于联邦滤波的偏振光/SINS/BDS/地磁组合导航算法[J]. 传感器与微系统, 2022, 41(2): 136-139.
|
|
|
| [1] | CAO Haozhe, LIU Quanpan. Unmanned Swarm Collaborative Visual SLAM Algorithm Based on Semi-direct Method [J]. Acta Armamentarii, 2023, 44(11): 3345-3358. |
| [2] | ZHU Jianliang, WANG Liya, BO Yuming. Pedestrian GNSS/PDR Integrated Navigation System with Graph Optimization [J]. Acta Armamentarii, 2023, 44(10): 3137-3145. |
| [3] | NI Long-qiang1,2,GAO She-sheng1,XUE Li1. A Tracking Method of Multi-sensor to Track the Multiple Targets Under the Condition of Low Detection Probability [J]. Acta Armamentarii, 2013, 34(1): 87-92. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||