
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (10): 3137-3145.doi: 10.12382/bgxb.2022.0557
Previous Articles Next Articles
ZHU Jianliang*( ), WANG Liya, BO Yuming
), WANG Liya, BO Yuming
Received:2022-06-22
Online:2023-10-30
Contact:
ZHU Jianliang
CLC Number:
ZHU Jianliang, WANG Liya, BO Yuming. Pedestrian GNSS/PDR Integrated Navigation System with Graph Optimization[J]. Acta Armamentarii, 2023, 44(10): 3137-3145.
Add to citation manager EndNote|Ris|BibTeX
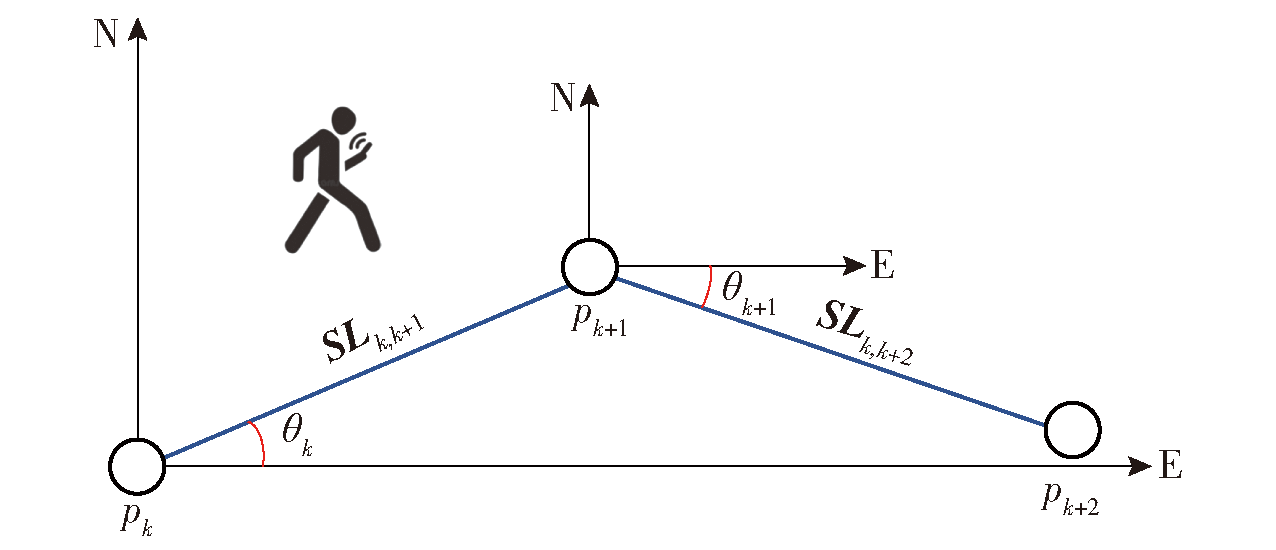
Fig.1 Principle diagram of position updating
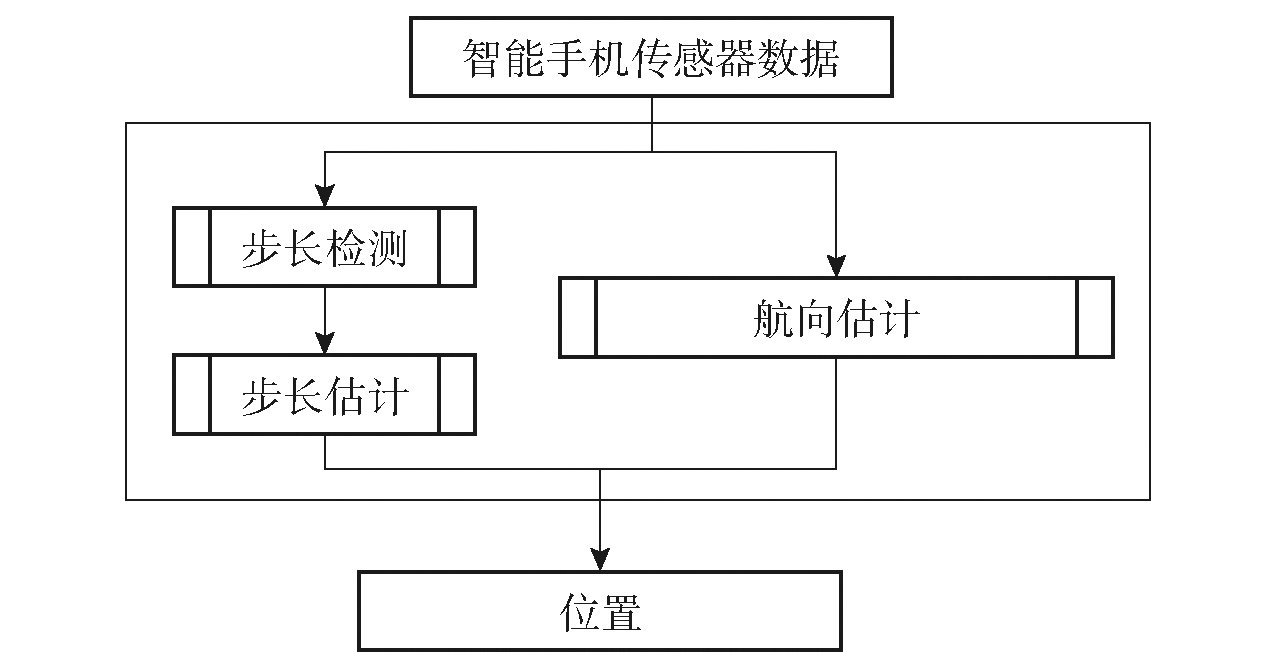
Fig.2 Principle diagram of pedestrian positioning based on smartphone function
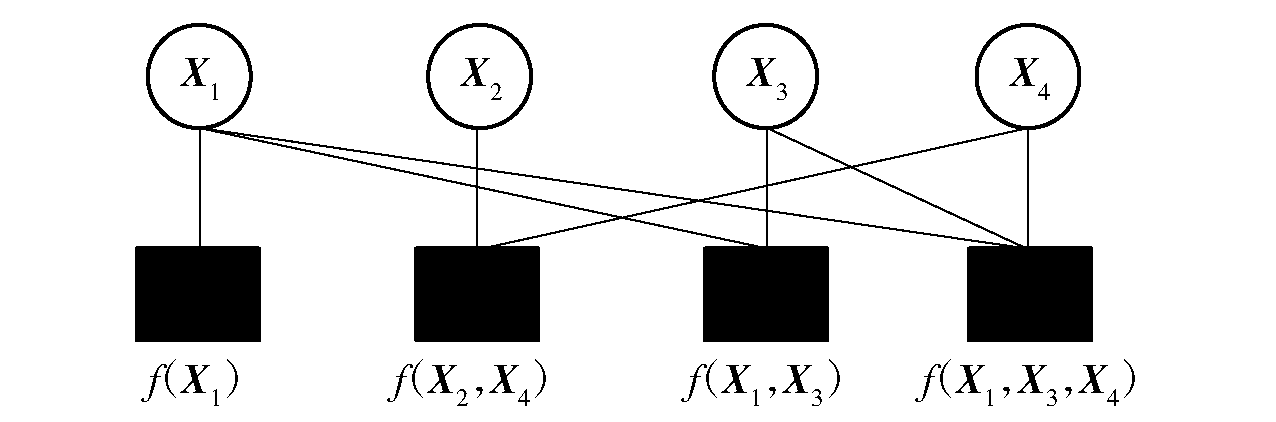
Fig.3 Factor graph of local function decomposition
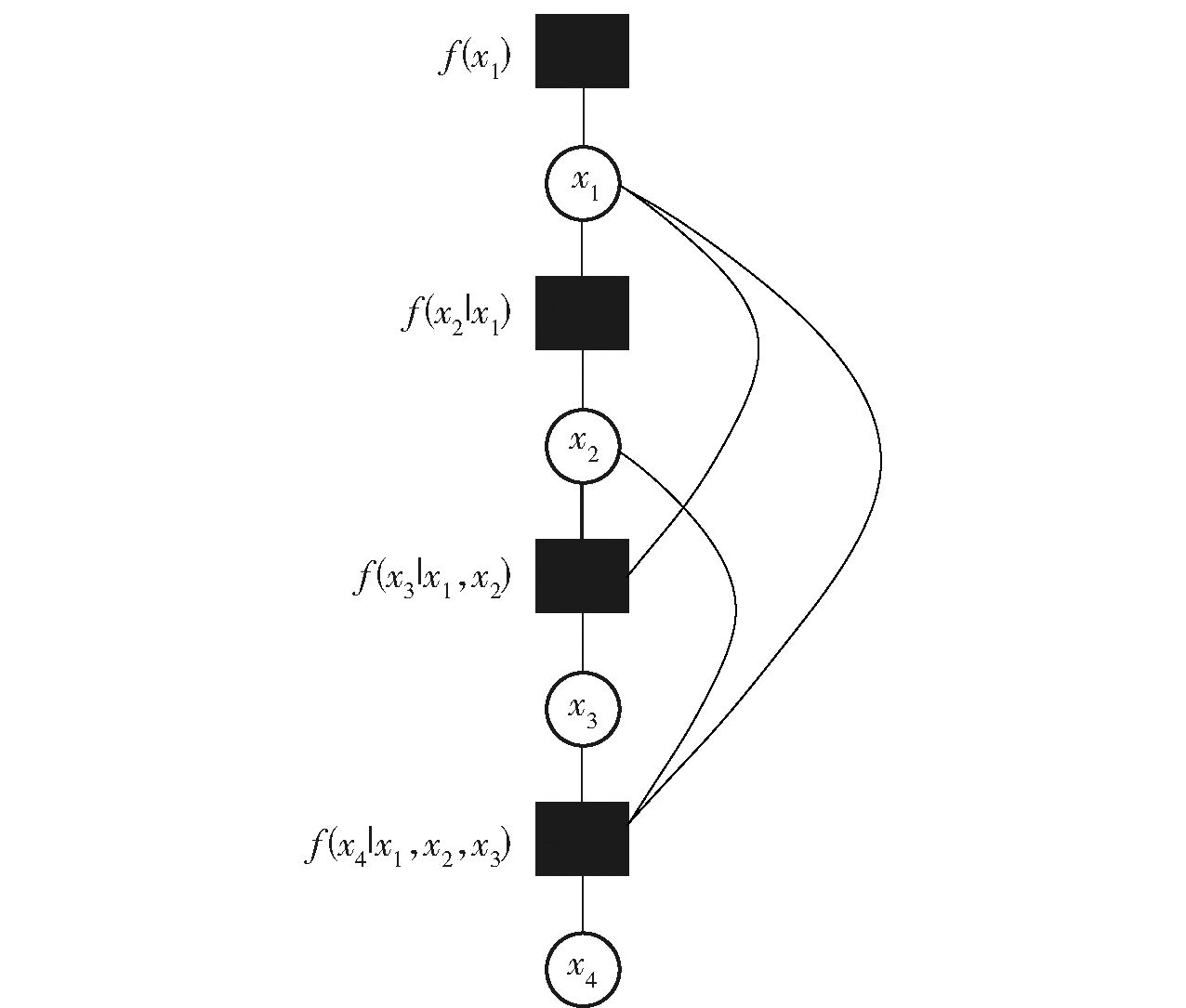
Fig.4 Factor graph of variable dependency relation
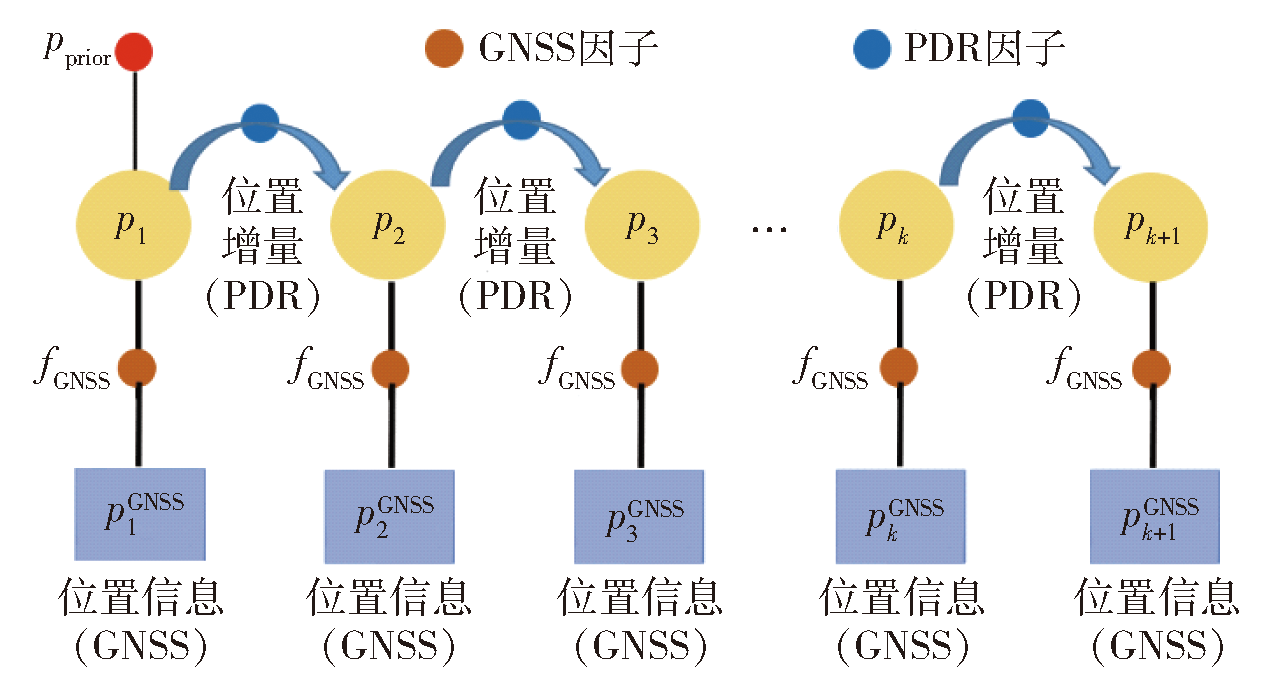
Fig.5 FGO-GNSS/PDR integrated navigation method
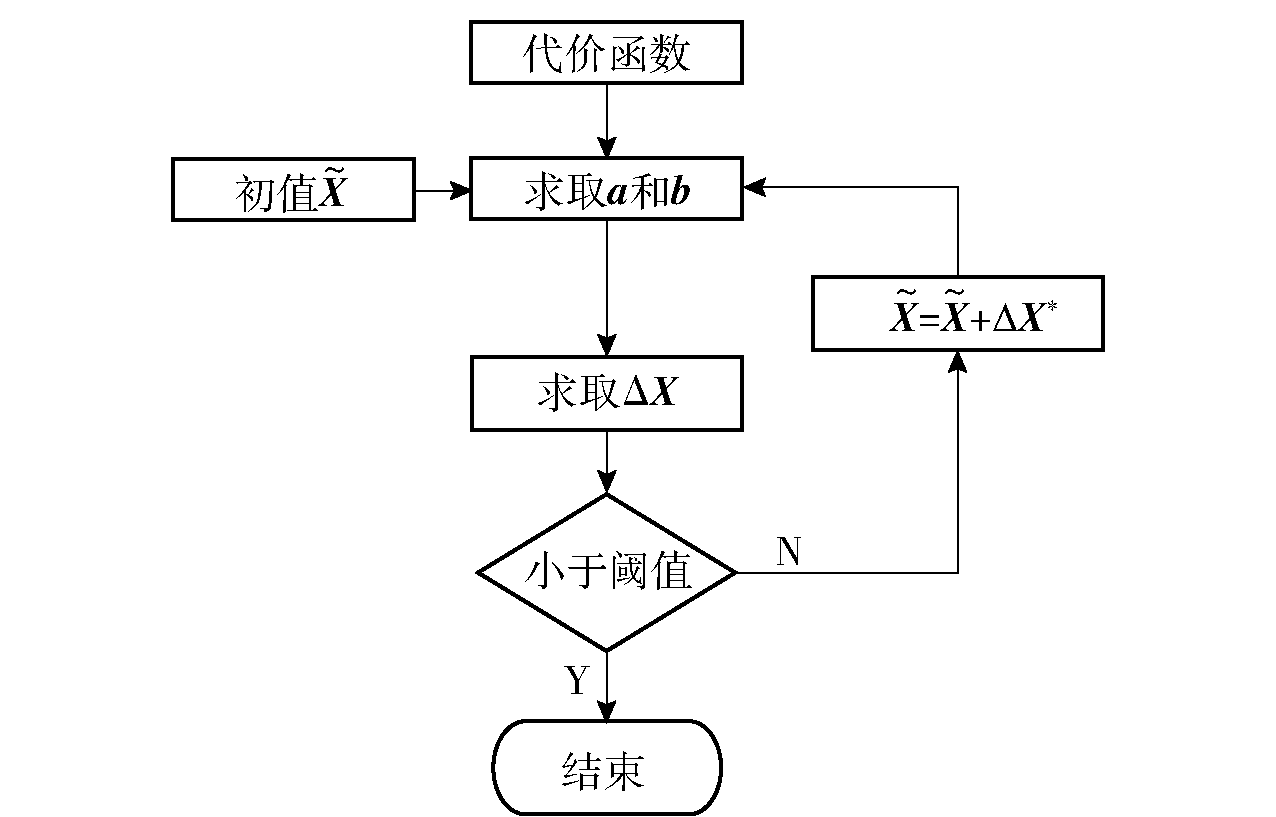
Fig.6 Flow chart of the solving process
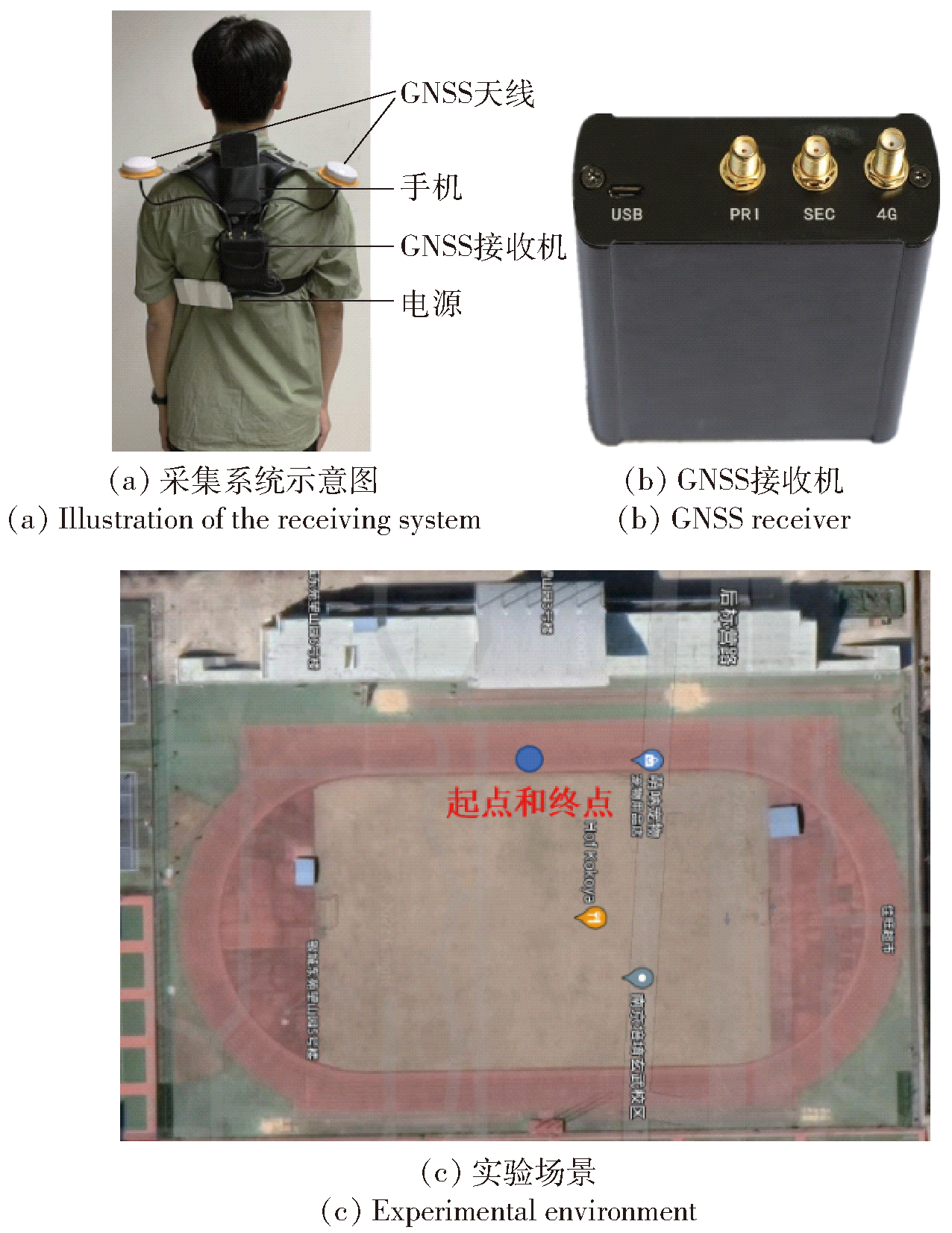
Fig.7 Dataset collecting equipment
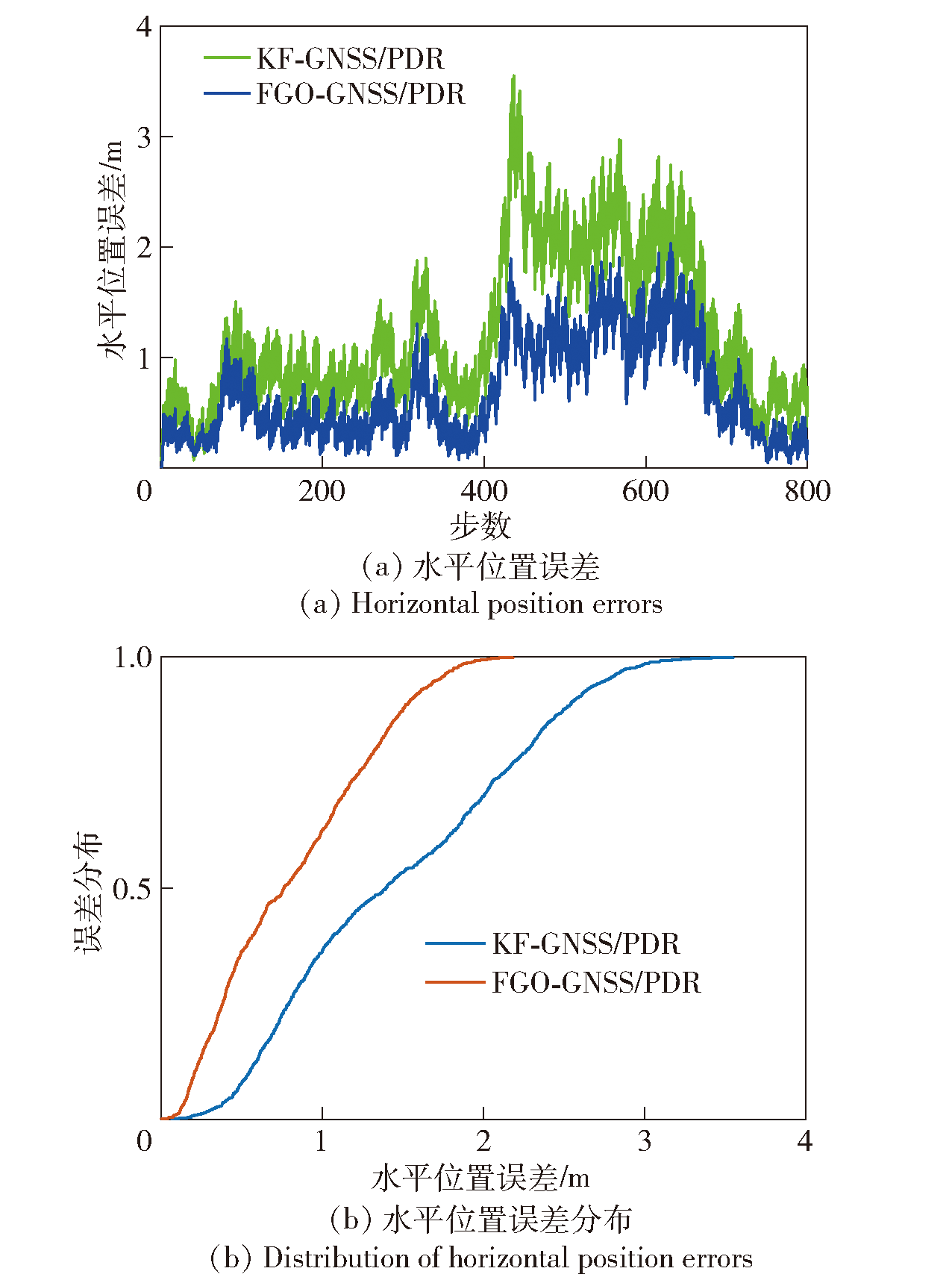
Fig.8 Hand-held experimental 1 horizontal position errors and distribution
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 1.48 | 0.77 |
| FGO-GNSS/PDR | 0.83 | 0.50 |
Table 1 Hand-held experiment 1 statistical results of horizontal position errors
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 1.48 | 0.77 |
| FGO-GNSS/PDR | 0.83 | 0.50 |
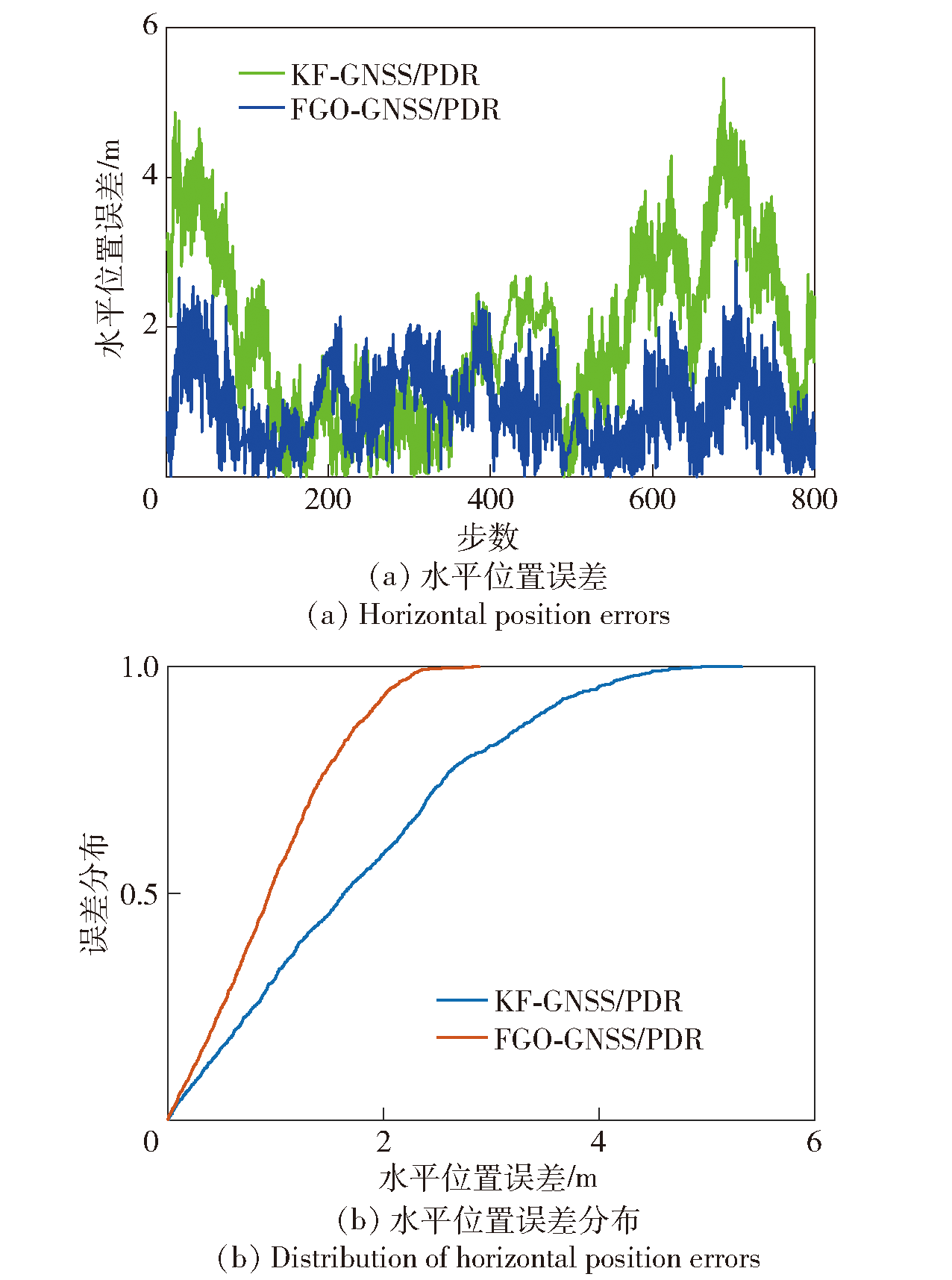
Fig.9 Hand-held experiment 2 horizontal position errors and distribution
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 1.78 | 1.18 |
| FGO-GNSS/PDR | 1.00 | 0.61 |
Table 2 Hand-held experiment 2 statistical results of horizontal position errors
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 1.78 | 1.18 |
| FGO-GNSS/PDR | 1.00 | 0.61 |
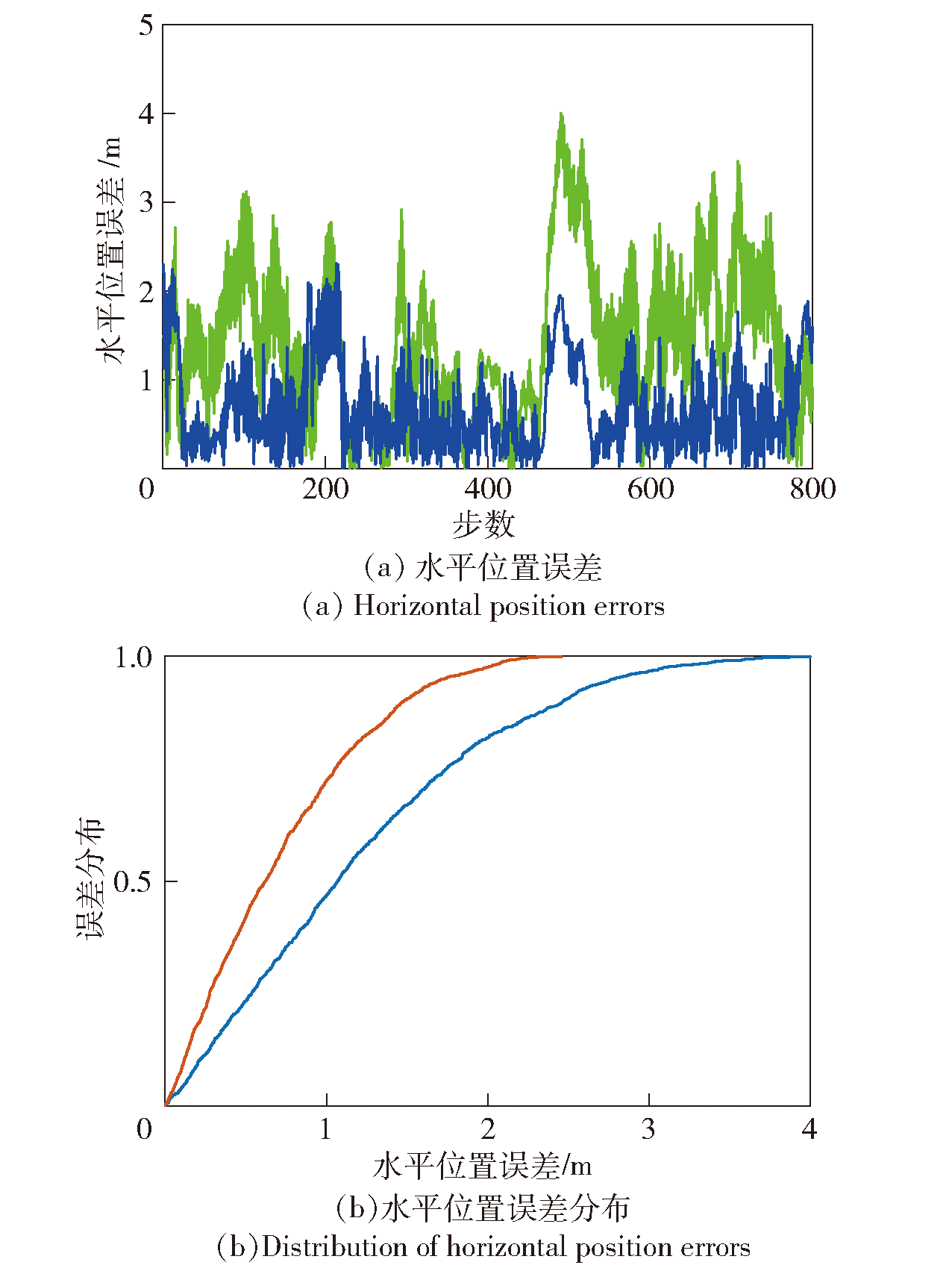
Fig.10 Knapsack experiment 1 horizontal position errors and distribution
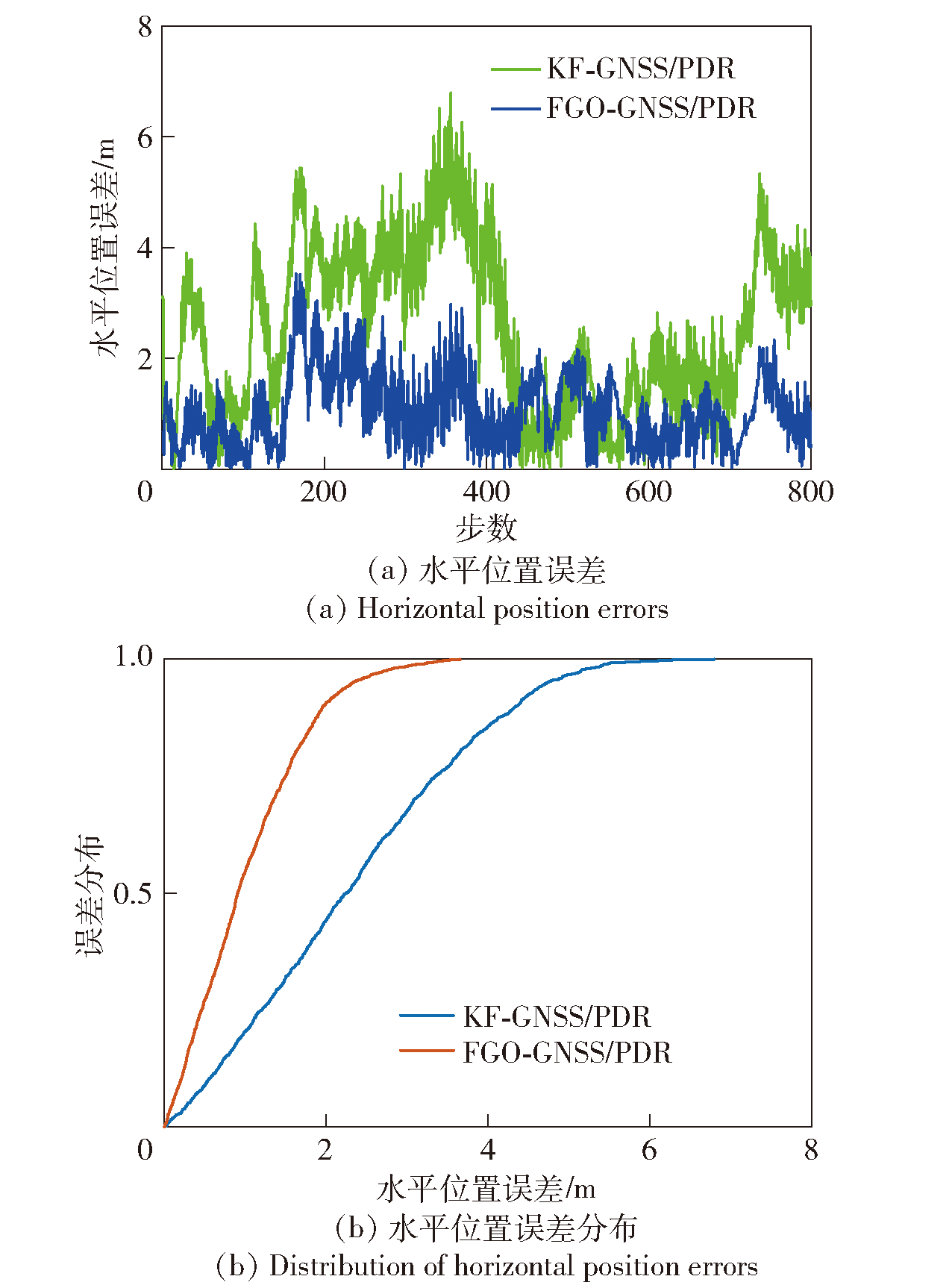
Fig.11 Knapsack experiment 2 horizontal position errors and distribution
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 1.21 | 0.84 |
| FGO-GNSS/PDR | 0.72 | 0.53 |
Table 3 Knapsack experiment 1 statistical results of horizontal position errors
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 1.21 | 0.84 |
| FGO-GNSS/PDR | 0.72 | 0.53 |
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 2.34 | 1.39 |
| FGO-GNSS/PDR | 1.03 | 0.71 |
Table 4 Knapsack experiment 2 statistical results of horizontal position errors
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 2.34 | 1.39 |
| FGO-GNSS/PDR | 1.03 | 0.71 |
| [1] |
郑学理, 付敬奇. 基于PDR和RSSI的室内定位算法研究[J]. 仪器仪表学报, 2015, 36(5): 1177-1185.
|
|
|
|
| [2] |
doi: 10.3390/s150924595 pmid: 26404314 |
| [3] |
沈世斌, 谢非, 赵静, 等. 基于相位控制的惯性与卫星超紧组合导航系统信号解调方法[J]. 兵工学报, 2020, 41(3): 495-506.
doi: 10.3969/j.issn.1000-1093.2020.03.010 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.010 |
|
| [4] |
doi: 10.1109/JIOT.2021.3055794 URL |
| [5] |
doi: 10.1109/JIOT.2022.3150764 URL |
| [6] |
周瑞, 罗磊, 李志强, 等. 一种基于智能手机传感器的行人室内定位算法[J]. 计算机工程, 2016, 42(11): 22-26.
doi: 10.3969/j.issn.1000-3428.2016.11.004 |
|
doi: 10.3969/j.issn.1000-3428.2016.11.004 |
|
| [7] |
肖烜, 王清哲, 程远, 等. 捷联惯导系统/里程计高精度紧组合导航算法[J]. 兵工学报, 2012, 33(4): 395-400.
|
|
|
|
| [8] |
刘明雍, 胡俊伟, 李闻白. 一种基于改进无迹卡尔曼滤波的自主水下航行器组合导航方法研究[J]. 兵工学报, 2011, 32(2): 252-256.
|
|
|
|
| [9] |
徐昊玮, 廉保旺, 刘尚波. 基于滑动窗迭代最大后验估计的多源组合导航因子图融合算法[J]. 兵工学报, 2019, 40(4): 807-819.
doi: 10.3969/j.issn.1000-1093.2019.04.016 |
|
doi: 10.3969/j.issn.1000-1093.2019.04.016 |
|
| [10] |
doi: 10.1007/s10291-021-01184-1 |
| [11] |
吴有龙, 王晓鸣, 曹鹏. 抗差估计及Allan方差在车载组合导航系统中的应用研究[J]. 兵工学报, 2013, 34(7): 889-895.
doi: 10. 3969/ j. issn. 1000-1093. 2013. 07. 015 |
|
|
|
| [12] |
黄欣, 熊智, 许建新, 等. 基于零速/航向自观测/地磁匹配的行人导航算法研究[J]. 兵工学报, 2017, 38(10): 2031-2040.
doi: 10.3969/j.issn.1000-1093.2017.10.020 |
|
doi: 10.3969/j.issn.1000-1093.2017.10.020 |
|
| [13] |
doi: 10.3390/s18051391 URL |
| [14] |
doi: 10.1016/j.asr.2016.09.010 URL |
| [15] |
doi: 10.3390/rs11182174 URL |
| [16] |
|
| [17] |
|
| [18] |
doi: 10.1109/JSEN.7361 URL |
| [19] |
doi: 10.1007/s10291-022-01260-0 |
| [20] |
|
| [21] |
doi: 10.1109/COML.4234 URL |
| [1] | ZHANG Fu-bin, MA Peng, WANG Zhi-hui. SINS/DVL Integrated Navigation Algorithm Based on Transversal Coordinate Frame in Polar Region [J]. Acta Armamentarii, 2016, 37(7): 1229-1235. |
| [2] | PAN Jia-liang, XIONG Zhi, WANG Li-na, YU Feng, ZHAO Hui, LIN Ai-jun. A Simplified UKF Algorithm for SINS/GPS/CNS Integrated Navigation System in Launch Inertial Coordinate System [J]. Acta Armamentarii, 2015, 36(3): 484-491. |
| [3] | WU You-long, WANG Xiao-ming, CAO Peng. The Application of Robust Estimation and Allan Variance Method in Land Vehicle Navigation [J]. Acta Armamentarii, 2013, 34(7): 889-895. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||