
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (9): 241068-.doi: 10.12382/bgxb.2024.1068
Previous Articles Next Articles
JI Lu1, CHEN Chao1,*( ), CHEN Heng2
), CHEN Heng2
Received:2024-11-26
Online:2025-09-24
Contact:
CHEN Chao
CLC Number:
JI Lu, CHEN Chao, CHEN Heng. 3D Trajectory Planning of UAVs Based on Improved Dung Beetle Optimization Algorithm[J]. Acta Armamentarii, 2025, 46(9): 241068-.
Add to citation manager EndNote|Ris|BibTeX
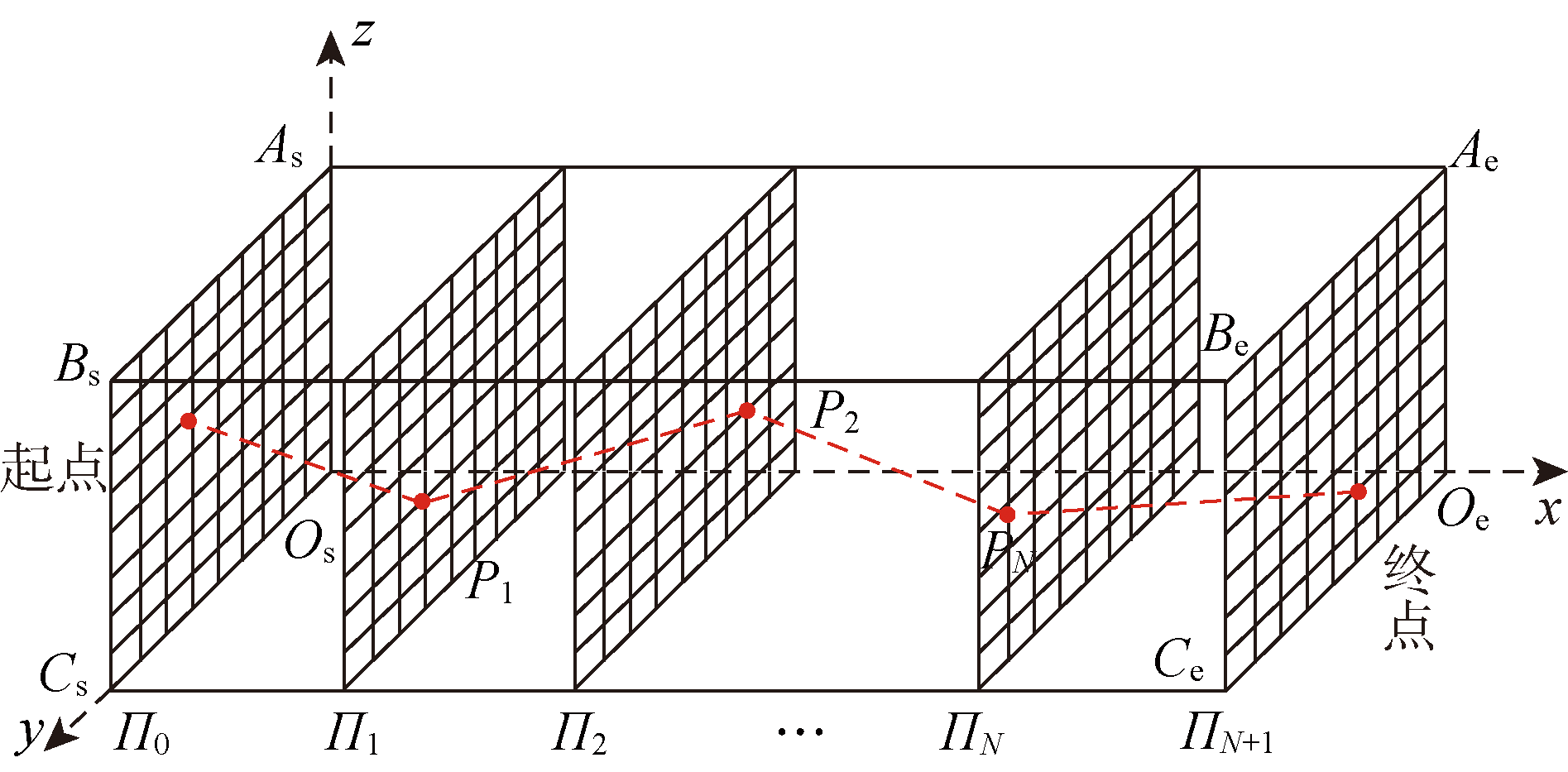
Fig.1 Raster method of environmental modelling
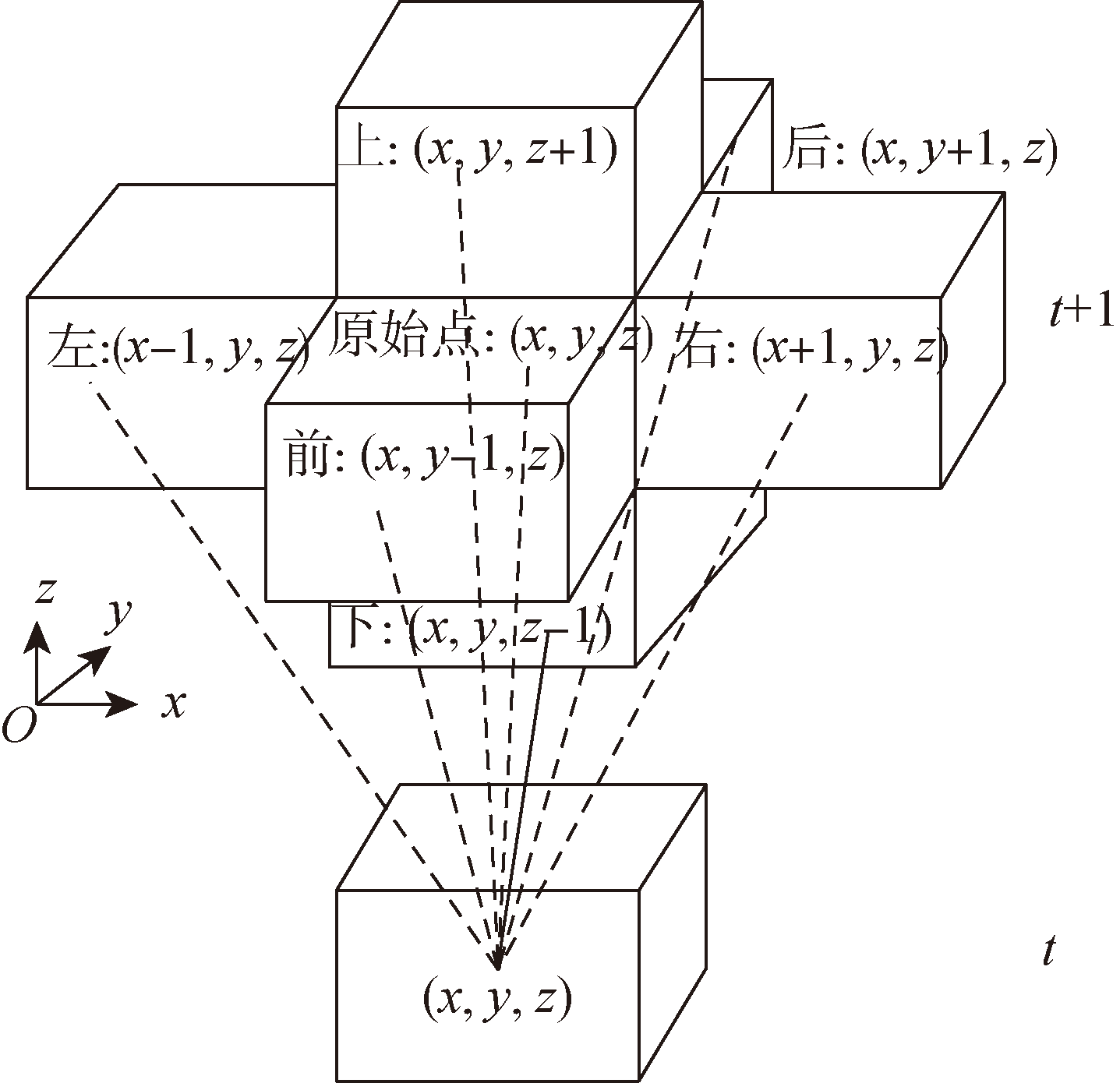
Fig.2 Selection of six directions in three-dimensional space

Fig.3 Distribution of random points generated by different initial value mappings under 2000 iterations
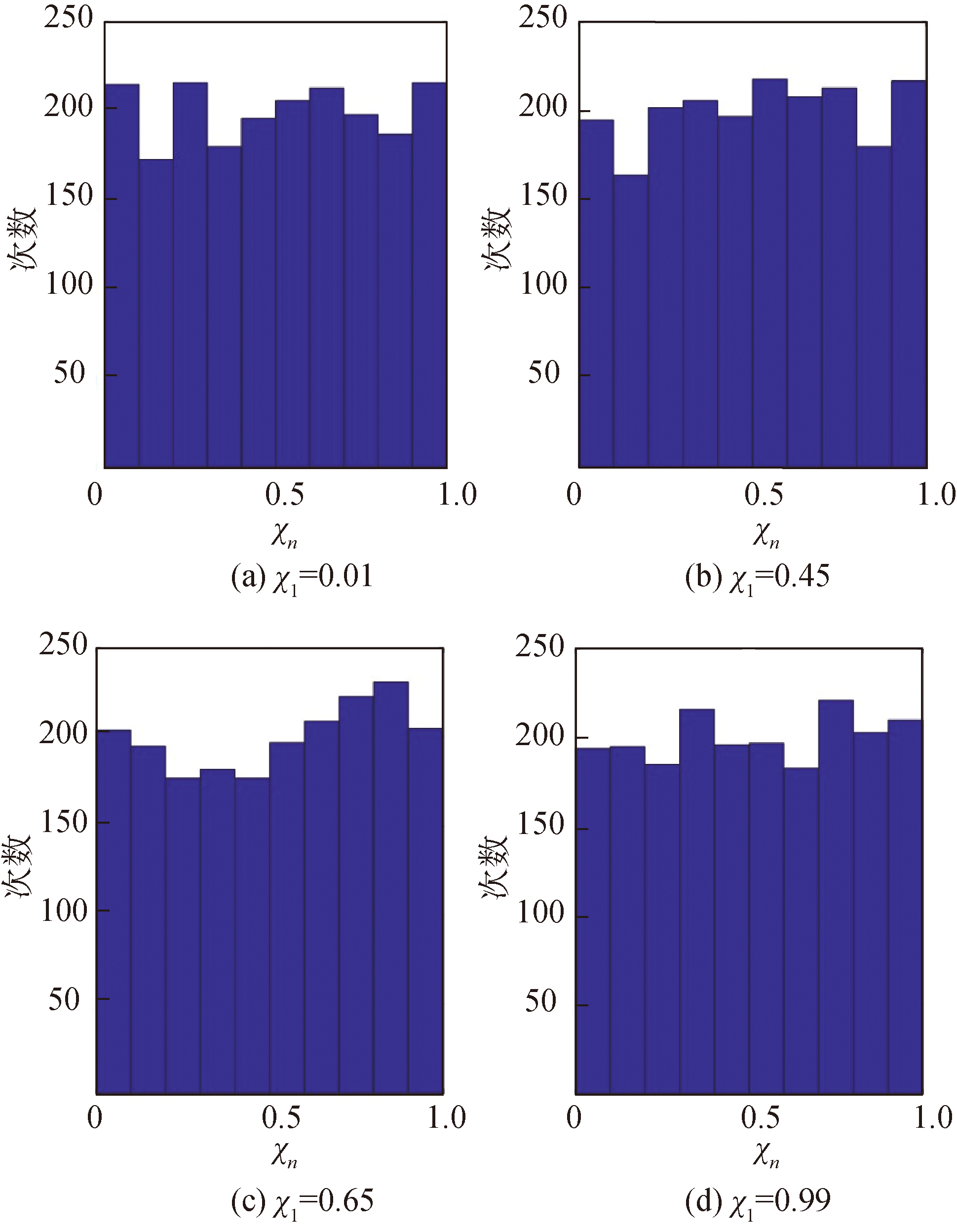
Fig.4 Histograms generated by different initial value mappings under 2000 iterations
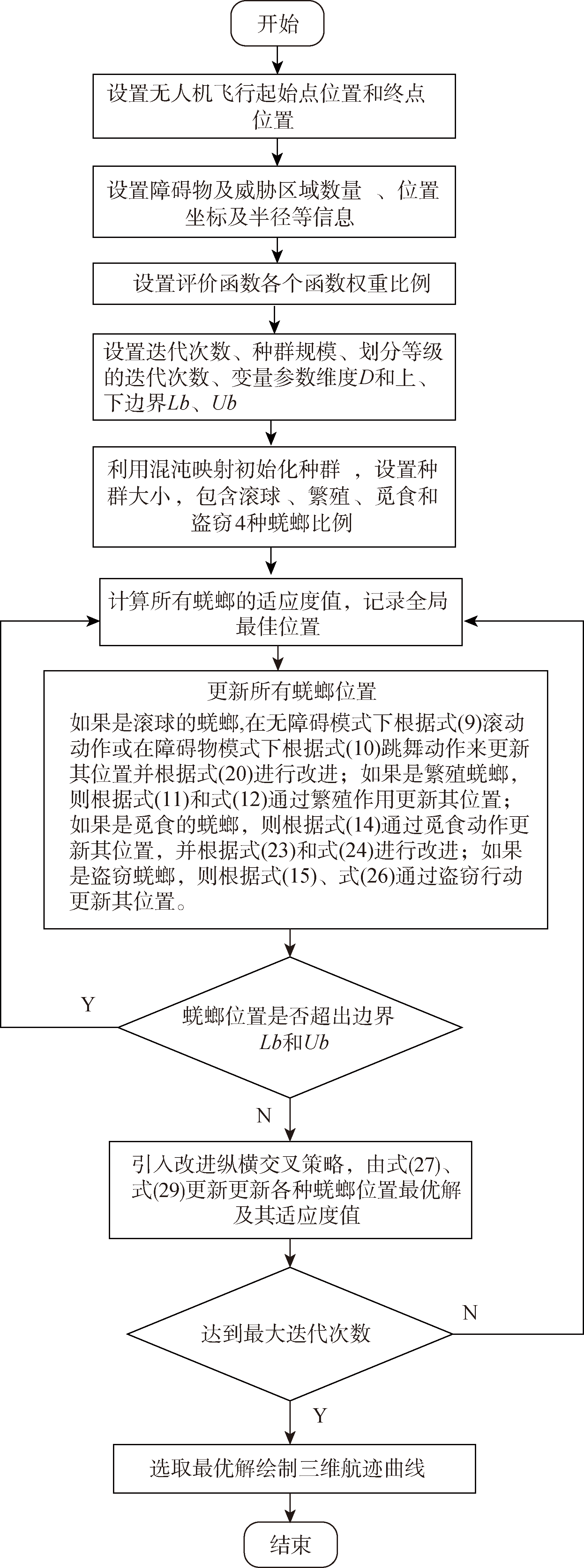
Fig.5 Flowchart of the improved DBO algorithm
| 算法 | 参数设置 |
|---|---|
| MSIDBO算法 | K=0.1,b=0.3,S=0.5 |
| DBO算法 | K=0.1,b=0.3,S=0.5 |
| SCSO算法 | rG=[2,0],R=[-rG, rG] |
| PSO算法 | w=0.5,c1=2,c2=2 |
| HO算法 | T>0.6 |
| GWO算法 | amax=2,amin=0 |
Table 1 Parameter values of 6 algorithms
| 算法 | 参数设置 |
|---|---|
| MSIDBO算法 | K=0.1,b=0.3,S=0.5 |
| DBO算法 | K=0.1,b=0.3,S=0.5 |
| SCSO算法 | rG=[2,0],R=[-rG, rG] |
| PSO算法 | w=0.5,c1=2,c2=2 |
| HO算法 | T>0.6 |
| GWO算法 | amax=2,amin=0 |
| 类型 | 编号 | 函数 | 取值范围 | 维度 | 理论最优值 |
|---|---|---|---|---|---|
| 单峰函数 | F1 | [-100,100] | 20 | 300 | |
| 基础函数 | F2 | [-100,100] | 20 | 400 | |
| F4 | [-100,100] | 20 | 800 | ||
| 混合函数 | F6 | [-100,100] | 20 | 1800 | |
| F8 | [-100,100] | 20 | 2200 | ||
| 组合函数 | F10 | [-100,100] | 20 | 2400 | |
| F12 | [-100,100] | 20 | 2700 |
Table 2 CEC2022 test function
| 类型 | 编号 | 函数 | 取值范围 | 维度 | 理论最优值 |
|---|---|---|---|---|---|
| 单峰函数 | F1 | [-100,100] | 20 | 300 | |
| 基础函数 | F2 | [-100,100] | 20 | 400 | |
| F4 | [-100,100] | 20 | 800 | ||
| 混合函数 | F6 | [-100,100] | 20 | 1800 | |
| F8 | [-100,100] | 20 | 2200 | ||
| 组合函数 | F10 | [-100,100] | 20 | 2400 | |
| F12 | [-100,100] | 20 | 2700 |
| 算法 | F1 | F2 | F4 | F6 | ||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 平均值 | 标准差 | 最优值 | 平均值 | 标准差 | 最优值 | 平均值 | 标准差 | 最优值 | 平均值 | 标准差 | 最优值 | |||||||||||||||||
| MSIDBO 算法 | 3.61×102 | 2.08×102 | 3.00×102 | 4.48×102 | 1.55×101 | 3.95×102 | 6.04×102 | 1.21×102 | 8.01×102 | 9.05×102 | 2.19×103 | 1.90×103 | ||||||||||||||||
| DBO 算法 | 1.27×104 | 8.54×103 | 4.47×103 | 4.71×102 | 3.69×101 | 4.07×102 | 9.09×102 | 2.86×101 | 8.64×102 | 5.46×104 | 1.30×105 | 2.16×103 | ||||||||||||||||
| SCSO 算法 | 9.25×103 | 3.84×103 | 1.27×103 | 5.24×102 | 4.73×101 | 4.65×102 | 8.85×102 | 1.08×101 | 8.77×102 | 2.48×106 | 6.43×105 | 2.04×103 | ||||||||||||||||
| PSO 算法 | 6.41×102 | 4.34×102 | 3.80×102 | 4.66×102 | 4.45×101 | 4.10×102 | 8.41×102 | 1.15×101 | 8.16×102 | 1.03×106 | 5.07×105 | 1.98×103 | ||||||||||||||||
| HO算法 | 6.56×104 | 2.00×104 | 2.93×104 | 2.47×103 | 6.73×102 | 1.71×103 | 9.85×102 | 2.09×101 | 9.28×102 | 1.68×109 | 8.56×108 | 8.04×108 | ||||||||||||||||
| GWO算法 | 1.00×104 | 3.76×104 | 4.41×103 | 4.86×102 | 3.43×101 | 4.49×102 | 8.49×102 | 2.72×102 | 8.19×102 | 7.33×105 | 2.17×105 | 2.67×103 | ||||||||||||||||
| 算法 | F8 | F10 | F12 | 评价 | 总 排 名 | |||||||||||||||||||||||
| 平均值 | 标准差 | 最优值 | 平均值 | 标准差 | 最优值 | 平均值 | 标准差 | 最优值 | 各个测试函数平均值排名 | |||||||||||||||||||
| F1 | F2 | F4 | F6 | F8 | F10 | F12 | ||||||||||||||||||||||
| MSIDBO 算法 | 2.22×103 | 1.22×101 | 2.20×103 | 2.71×103 | 1.31×102 | 1.43×103 | 2.01×103 | 2.69×101 | 1.05×103 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | |||||||||||
| DBO算法 | 2.30×103 | 7.01×101 | 2.22×103 | 2.85×103 | 6.63×102 | 2.50×103 | 2.99×103 | 5.51×101 | 2.95×103 | 5 | 3 | 5 | 2 | 5 | 2 | 4 | 4 | |||||||||||
| SCSO算法 | 2.26×103 | 5.86×101 | 2.22×103 | 3.09×103 | 1.04×103 | 2.50×103 | 3.00×103 | 3.5×101 | 2.97×101 | 3 | 4 | 4 | 5 | 4 | 4 | 5 | 5 | |||||||||||
| PSO算法 | 2.25×103 | 5.50×101 | 2.22×103 | 2.89×103 | 4.58×102 | 2.50×103 | 2.98×103 | 3.26×101 | 2.95×101 | 2 | 2 | 2 | 4 | 2 | 3 | 3 | 2 | |||||||||||
| HO算法 | 2.72×103 | 5.78×102 | 2.29×103 | 6.61×103 | 1.52×104 | 2.83×103 | 3.86×103 | 3.24×102 | 3.66×102 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | |||||||||||
| GWO算法 | 2.25×103 | 4.84×101 | 2.22×103 | 3.34×103 | 8.04×102 | 2.50×103 | 2.95×103 | 1.15×101 | 2.04×101 | 4 | 3 | 3 | 3 | 2 | 5 | 2 | 3 | |||||||||||
Table 3 Calculated results of different optimization algorithms for CEC2022 test function
| 算法 | F1 | F2 | F4 | F6 | ||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 平均值 | 标准差 | 最优值 | 平均值 | 标准差 | 最优值 | 平均值 | 标准差 | 最优值 | 平均值 | 标准差 | 最优值 | |||||||||||||||||
| MSIDBO 算法 | 3.61×102 | 2.08×102 | 3.00×102 | 4.48×102 | 1.55×101 | 3.95×102 | 6.04×102 | 1.21×102 | 8.01×102 | 9.05×102 | 2.19×103 | 1.90×103 | ||||||||||||||||
| DBO 算法 | 1.27×104 | 8.54×103 | 4.47×103 | 4.71×102 | 3.69×101 | 4.07×102 | 9.09×102 | 2.86×101 | 8.64×102 | 5.46×104 | 1.30×105 | 2.16×103 | ||||||||||||||||
| SCSO 算法 | 9.25×103 | 3.84×103 | 1.27×103 | 5.24×102 | 4.73×101 | 4.65×102 | 8.85×102 | 1.08×101 | 8.77×102 | 2.48×106 | 6.43×105 | 2.04×103 | ||||||||||||||||
| PSO 算法 | 6.41×102 | 4.34×102 | 3.80×102 | 4.66×102 | 4.45×101 | 4.10×102 | 8.41×102 | 1.15×101 | 8.16×102 | 1.03×106 | 5.07×105 | 1.98×103 | ||||||||||||||||
| HO算法 | 6.56×104 | 2.00×104 | 2.93×104 | 2.47×103 | 6.73×102 | 1.71×103 | 9.85×102 | 2.09×101 | 9.28×102 | 1.68×109 | 8.56×108 | 8.04×108 | ||||||||||||||||
| GWO算法 | 1.00×104 | 3.76×104 | 4.41×103 | 4.86×102 | 3.43×101 | 4.49×102 | 8.49×102 | 2.72×102 | 8.19×102 | 7.33×105 | 2.17×105 | 2.67×103 | ||||||||||||||||
| 算法 | F8 | F10 | F12 | 评价 | 总 排 名 | |||||||||||||||||||||||
| 平均值 | 标准差 | 最优值 | 平均值 | 标准差 | 最优值 | 平均值 | 标准差 | 最优值 | 各个测试函数平均值排名 | |||||||||||||||||||
| F1 | F2 | F4 | F6 | F8 | F10 | F12 | ||||||||||||||||||||||
| MSIDBO 算法 | 2.22×103 | 1.22×101 | 2.20×103 | 2.71×103 | 1.31×102 | 1.43×103 | 2.01×103 | 2.69×101 | 1.05×103 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | |||||||||||
| DBO算法 | 2.30×103 | 7.01×101 | 2.22×103 | 2.85×103 | 6.63×102 | 2.50×103 | 2.99×103 | 5.51×101 | 2.95×103 | 5 | 3 | 5 | 2 | 5 | 2 | 4 | 4 | |||||||||||
| SCSO算法 | 2.26×103 | 5.86×101 | 2.22×103 | 3.09×103 | 1.04×103 | 2.50×103 | 3.00×103 | 3.5×101 | 2.97×101 | 3 | 4 | 4 | 5 | 4 | 4 | 5 | 5 | |||||||||||
| PSO算法 | 2.25×103 | 5.50×101 | 2.22×103 | 2.89×103 | 4.58×102 | 2.50×103 | 2.98×103 | 3.26×101 | 2.95×101 | 2 | 2 | 2 | 4 | 2 | 3 | 3 | 2 | |||||||||||
| HO算法 | 2.72×103 | 5.78×102 | 2.29×103 | 6.61×103 | 1.52×104 | 2.83×103 | 3.86×103 | 3.24×102 | 3.66×102 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | |||||||||||
| GWO算法 | 2.25×103 | 4.84×101 | 2.22×103 | 3.34×103 | 8.04×102 | 2.50×103 | 2.95×103 | 1.15×101 | 2.04×101 | 4 | 3 | 3 | 3 | 2 | 5 | 2 | 3 | |||||||||||
| 模型 | (xM,i,xM,i)/ km | (xMd,i, xMd,i)/km | hi/ km | (xmen,i, ymen,i)/km | rmen,1 km | hmen,1/ km |
|---|---|---|---|---|---|---|
| 1 | (12,25) | (8.2,9.6) | 5.2 | (10,12) | 6.0 | 6.0 |
| (13,41) | (4.7,6.1) | 3.1 | (20,45) | 4.5 | 6.0 | |
| (27,09) | (6.4,5.0) | 3.5 | (25,15) | 5.5 | 6.0 | |
| (37,10) | (7.2,8.0) | 4.0 | (28,35) | 5.0 | 6.0 | |
| (39,32) | (6.0,10) | 6.0 | (35,45) | 4.0 | 6.0 | |
| 2 | (10,17) | (6.0,8.0) | 4.0 | (15,45) | 4.5 | 6.0 |
| (15,30) | (8.0,10.0) | 6.0 | (18,07) | 5.0 | 6.0 | |
| (25,40) | (5.0,7.0) | 4.5 | (28,15) | 5.5 | 6.0 | |
| (35,25) | (9.1,8.5) | 6.0 | (35,45) | 4.5 | 6.0 | |
| (40,10) | (6.0,7.0) | 5.5 | (43,35) | 5.0 | 6.0 | |
| 3 | (12,23) | (8.5,7.0) | 6.0 | (13,10) | 5.5 | 6.0 |
| (23,34) | (8.0,9.0) | 5.0 | (15,40) | 4.5 | 6.0 | |
| (25,15) | (6.5,8.0) | 3.0 | (25,15) | 6.0 | 6.0 | |
| (35,12) | (7.0,7.0) | 6.0 | (32,35) | 5.0 | 6.0 | |
| (35,41) | (5.0,7.5) | 4.0 | (40,25) | 4.0 | 6.0 |
Table 4 Parameters of mountain model and threat model
| 模型 | (xM,i,xM,i)/ km | (xMd,i, xMd,i)/km | hi/ km | (xmen,i, ymen,i)/km | rmen,1 km | hmen,1/ km |
|---|---|---|---|---|---|---|
| 1 | (12,25) | (8.2,9.6) | 5.2 | (10,12) | 6.0 | 6.0 |
| (13,41) | (4.7,6.1) | 3.1 | (20,45) | 4.5 | 6.0 | |
| (27,09) | (6.4,5.0) | 3.5 | (25,15) | 5.5 | 6.0 | |
| (37,10) | (7.2,8.0) | 4.0 | (28,35) | 5.0 | 6.0 | |
| (39,32) | (6.0,10) | 6.0 | (35,45) | 4.0 | 6.0 | |
| 2 | (10,17) | (6.0,8.0) | 4.0 | (15,45) | 4.5 | 6.0 |
| (15,30) | (8.0,10.0) | 6.0 | (18,07) | 5.0 | 6.0 | |
| (25,40) | (5.0,7.0) | 4.5 | (28,15) | 5.5 | 6.0 | |
| (35,25) | (9.1,8.5) | 6.0 | (35,45) | 4.5 | 6.0 | |
| (40,10) | (6.0,7.0) | 5.5 | (43,35) | 5.0 | 6.0 | |
| 3 | (12,23) | (8.5,7.0) | 6.0 | (13,10) | 5.5 | 6.0 |
| (23,34) | (8.0,9.0) | 5.0 | (15,40) | 4.5 | 6.0 | |
| (25,15) | (6.5,8.0) | 3.0 | (25,15) | 6.0 | 6.0 | |
| (35,12) | (7.0,7.0) | 6.0 | (32,35) | 5.0 | 6.0 | |
| (35,41) | (5.0,7.5) | 4.0 | (40,25) | 4.0 | 6.0 |
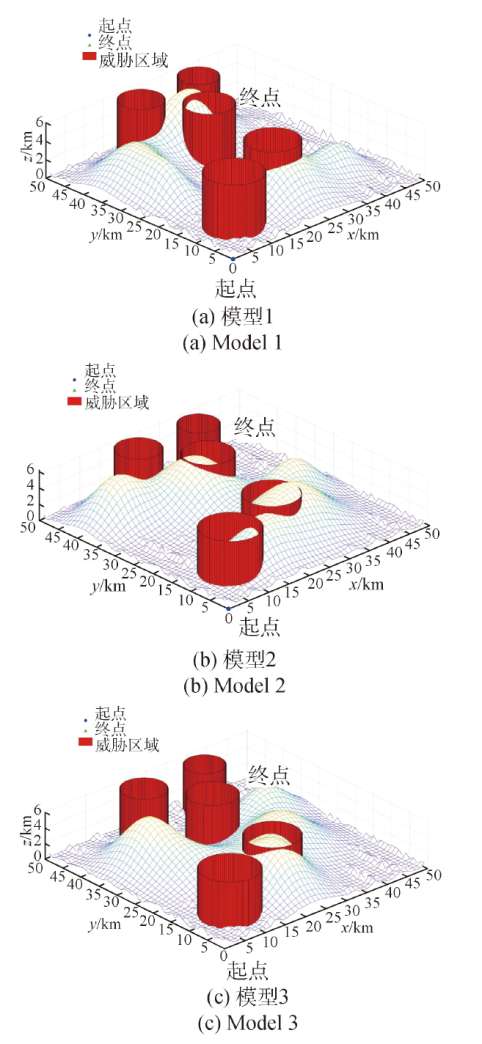
Fig.6 Three-dimensional diagrams of three models
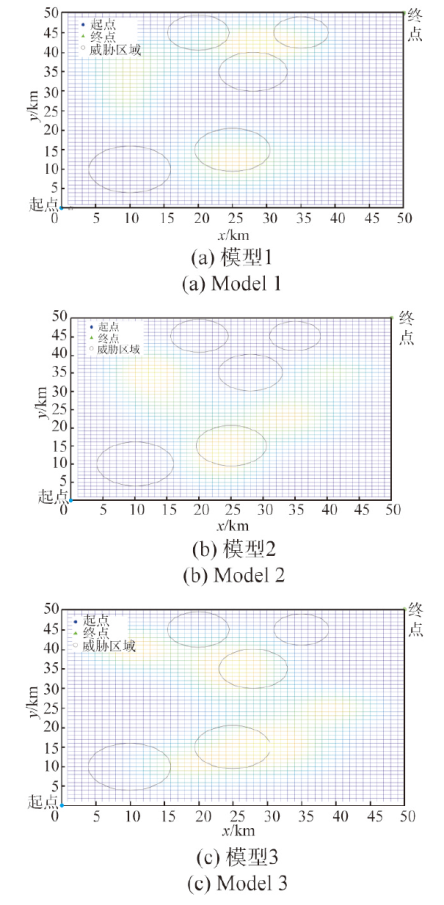
Fig.7 Top views of three models

Fig.8 3D comparison of trajectory planning under three models
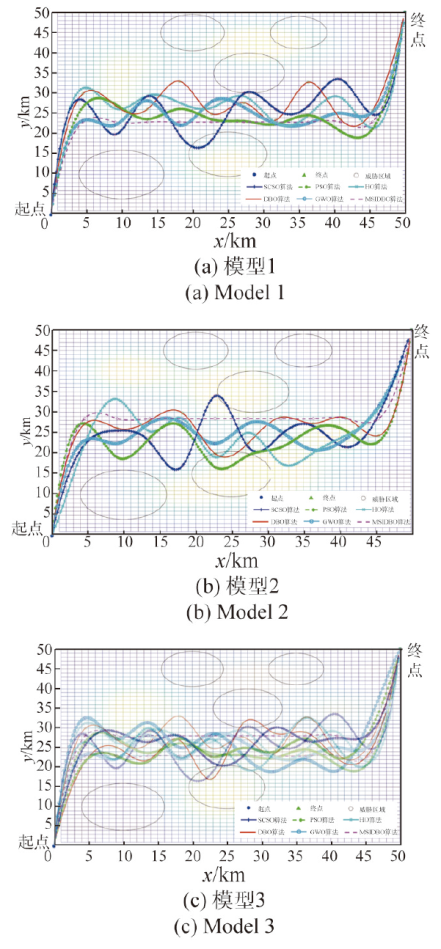
Fig.9 Top views of trajectory planning under three models
| 算法 | 模型 | 最优值 | 平均值 | 总平均值 |
|---|---|---|---|---|
| MSIDBO算法 | 1 | 37.458 | 42.216 | 48.901 |
| 2 | 45.295 | 54.056 | ||
| 3 | 48.453 | 50.432 | ||
| DBO算法 | 1 | 68.456 | 72.317 | 84.487 |
| 2 | 82.709 | 108.189 | ||
| 3 | 66.485 | 72.966 | ||
| SCSO算法 | 1 | 58.756 | 61.085 | 79.354 |
| 2 | 73.490 | 95.312 | ||
| 3 | 69.237 | 81.664 | ||
| PSO算法 | 1 | 678.892 | 53.877 | 79.904 |
| 2 | 630.456 | 76.100 | ||
| 3 | 620.678 | 109.733 | ||
| HO算法 | 1 | 70.589 | 79.593 | 87.594 |
| 2 | 83.780 | 89.260 | ||
| 3 | 95.678 | 93.931 | ||
| GWO算法 | 1 | 50.287 | 59.196 | 84.022 |
| 2 | 98.125 | 106.277 | ||
| 3 | 80.765 | 86.594 |
Table 5 Total cost values under three models
| 算法 | 模型 | 最优值 | 平均值 | 总平均值 |
|---|---|---|---|---|
| MSIDBO算法 | 1 | 37.458 | 42.216 | 48.901 |
| 2 | 45.295 | 54.056 | ||
| 3 | 48.453 | 50.432 | ||
| DBO算法 | 1 | 68.456 | 72.317 | 84.487 |
| 2 | 82.709 | 108.189 | ||
| 3 | 66.485 | 72.966 | ||
| SCSO算法 | 1 | 58.756 | 61.085 | 79.354 |
| 2 | 73.490 | 95.312 | ||
| 3 | 69.237 | 81.664 | ||
| PSO算法 | 1 | 678.892 | 53.877 | 79.904 |
| 2 | 630.456 | 76.100 | ||
| 3 | 620.678 | 109.733 | ||
| HO算法 | 1 | 70.589 | 79.593 | 87.594 |
| 2 | 83.780 | 89.260 | ||
| 3 | 95.678 | 93.931 | ||
| GWO算法 | 1 | 50.287 | 59.196 | 84.022 |
| 2 | 98.125 | 106.277 | ||
| 3 | 80.765 | 86.594 |

Fig.10 Comparison of trajectory planning path,altitude and corner costs under three models
| [1] |
王海峰. 高性能协同作战无人机的发展与思考[J]. 航空学报, 2024, 45(17):530304.
|
|
|
|
| [2] |
曾照洋, 彭文胜, 李云凯, 等. 智能无人机集群可靠性技术内涵、发展及挑战[J]. 兵工学报, 2025, 46(3):240322.
doi: 10.12382/bgxb.2024.0322 |
|
|
|
| [3] |
陈丽芳, 杨火根, 陈智超, 等. B样条技术与遗传算法融合的全局路径规划[J]. 浙江大学学报(工学版), 2024, 58(12):2520-2530.
|
|
|
|
| [4] |
王东振, 张岳, 赵宇, 等. 基于RRT-Dubins的无人机航迹优化方法[J]. 兵工学报, 2024, 45(8):2761-2773.
doi: 10.12382/bgxb.2023.0611 |
|
doi: 10.12382/bgxb.2023.0611 |
|
| [5] |
耿增显, 广鑫, 陈俊宇, 等. 基于混沌粒子群算法的城市无人机路径规划[J]. 西华大学学报(自然科学版), 2024, 43(6):1-7.
|
|
|
|
| [6] |
习凤, 林逢春. 结合模拟退火算法与遗传算法的动态协同路径规划研究[J]. 舰船科学技术, 2024, 46(19):161-164.
|
|
|
|
| [7] |
朱瑾, 黄琦. 路网资源分配下自动化码头水平运输调度与路径规划[J]. 吉林大学学报(工学版), 2024, 54(8):2245-2255.
|
|
|
|
| [8] |
王康, 司鹏, 陈莉, 等. 基于改进沙猫群算法的无人机三维航迹规划[J]. 兵工学报, 2023, 44(11):3382-3393.
doi: 10.12382/bgxb.2023.0763 |
|
doi: 10.12382/bgxb.2023.0763 |
|
| [9] |
孙博, 章文鹏, 吴泽萱, 等. 基于多策略高尔夫优化算法的无人机三维航迹规划[J/OL]. 北京航空航天大学学报, 2024(2024-09-25).http://dx.doi.org/10.13700/j.bh.1001-5965.2024.0429.
|
|
|
|
| [10] |
王福仪, 孟秀云, 张海阔. 基于ε-level蝙蝠算法的无人机三维航迹规划[J]. 北京航空航天大学学报, 2024, 50(5):1593-1603.
|
|
|
|
| [11] |
|
| [12] |
薛阳, 倪大斌, 卢秋红, 等. 基于PGWO算法的移动机器人路径规划[J]. 控制与决策, 2025, 40(4):1395-1401.
|
|
|
|
| [13] |
|
| [14] |
吴亚中, 陈璐, 马强, 等. 多策略增强的蜣螂优化算法及其工程应用[J]. 华中科技大学学报(自然科学版), 2025, 53(2):95-103.
|
|
|
|
| [15] |
隋东, 杨振宇, 丁松滨, 等. 基于EMSDBO算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2024, 46(5):1756-1766.
doi: 10.12305/j.issn.1001-506X.2024.05.28 |
|
|
|
| [16] |
王建忠, 梁飞达. 自由空域环境下多无人机进场三维航迹规划研究[J/OL]. 北京航空航天大学学报, 2024(2024-10-11).https://doi.org/10.13700/j.bh.1001-5965.2024.0496.
|
|
|
|
| [17] |
甘茂成. 基于ArcGIS的海上安全航线规划系统研究[D]. 武汉: 武汉理工大学, 2013.
|
|
|
|
| [18] |
喻凡坤. 城市环境下无人机路径规划与目标检测技术研究[D]. 天津: 天津大学, 2022.
|
|
|
|
| [19] |
易康, 赵玉婷, 潘健. 一种基于八叉树表示的三维物体分类算法实现[J]. 电信快报, 2019(4):38-41.
|
|
|
|
| [20] |
|
| [21] |
|
| [22] |
王素欣, 温恒, 卢福强, 等. 货物三维装箱问题建模及其乌鸦搜索算法优化[J]. 湖南大学学报(自然科学版), 2020, 47(8):21-30.
|
|
|
|
| [23] |
陈思哲, 王玉乐, 陶以彬, 等. 基于纵横交叉优化的可重构电池组环流抑制策略[J]. 电网技术, 2022, 46(1):165-174.
|
|
|
|
| [24] |
|
| [1] | WANG Zhuoyao, LI Chuanjun, MA Jingquan, YU Jiaqi. Real-time Coordinated Trajectory Planning Method of Unpowered Gliding Vehicle Clusters [J]. Acta Armamentarii, 2025, 46(8): 240827-. |
| [2] | ZHANG Yue, ZHANG Ning, XU Xiping, PAN Yue. UAV Trajectory Planning under Complex Constraints Based on GOTDBO Algorithm [J]. Acta Armamentarii, 2025, 46(8): 240997-. |
| [3] | XU Yang, WEI Chao, FENG Fuyong, HU Leyun. Autonomous Landing of UAVs based on Spatio-temporal Decomposition Planning [J]. Acta Armamentarii, 2025, 46(7): 240653-. |
| [4] | QIN Boyu, ZHANG Dong, TANG Shuo. A Discussion on Key Issues and Technologies of Aircraft Swarm Safety Control [J]. Acta Armamentarii, 2025, 46(4): 240215-. |
| [5] | HE Yang, LI Gang. Research on Trajectory Planning Control Method of Intelligent Vehicle Based on Velocity Obstacle Model [J]. Acta Armamentarii, 2025, 46(4): 240058-. |
| [6] | LI Yingshun, YU Ang, LI Mao, HE Zhe, LIU Shiming. Fault Diagnosis of Armored Vehicle Engine Based on KLDA-IDBO-BP [J]. Acta Armamentarii, 2025, 46(3): 240083-. |
| [7] | LI Yaxuan, LIU Xinfu. Real-time Trajectory Planning for Fixed-wing UAVs Based on Exact Convex Relaxation [J]. Acta Armamentarii, 2025, 46(3): 240362-. |
| [8] | NAN Wenjiang, YAN Xunliang, YANG Yuxuan, WANG Peichen. Rapid Planning of Longitudinal-lateral Comprehensive Control Reentry Gliding Trajectory Considering Time Constraints [J]. Acta Armamentarii, 2025, 46(3): 240154-. |
| [9] | WANG Dongzhen, ZHANG Yue, ZHAO Yu, HUANG Daqing. A UAV Trajectory Optimization Method Based on RRT-Dubins [J]. Acta Armamentarii, 2024, 45(8): 2761-2773. |
| [10] | WANG Peichen, YAN Xunliang, NAN Wenjiang, LI Xinguo. A Rapid and Near Analytic Planning Method for Gliding Trajectory under Time Constraints [J]. Acta Armamentarii, 2024, 45(7): 2294-2305. |
| [11] | YIN Qiulin, CHEN Qi, WANG Zhongyuan, WANG Qinghai. Rapid Trajectory Planning for Glide-guided Projectiles in Single-gun Multi-shot Scenarios Considering Time-spatial Coordination [J]. Acta Armamentarii, 2024, 45(3): 798-809. |
| [12] | MEI Zewei, LI Tianren, ZHU Jialin, SHAO Xingling, DING Tianyun, LIU Jun. A Trajectory Planning Method Based on DQN Variable Dynamic Intelligent Decision [J]. Acta Armamentarii, 2024, 45(12): 4395-4406. |
| [13] | DING Tianyun, XIA Yi, MEI Zewei, SHAO Xingling, LIU Jun. A DDPG-based Trajectory Planning Method for Collision Avoidance of Morphing Spacecraft [J]. Acta Armamentarii, 2024, 45(11): 3903-3914. |
| [14] | JIA Yifei, JIANG Chaoyang. Dynamic Reconfigurable Adaptive UGV Formation System [J]. Acta Armamentarii, 2024, 45(10): 3654-3673. |
| [15] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||