
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (S1): 1-9.doi: 10.12382/bgxb.2024.0030
Previous Articles Next Articles
GUO Chengbao1,*( ), WANG Wenjing2, TAI Ziyan1
), WANG Wenjing2, TAI Ziyan1
Received:2024-01-02
Online:2024-11-06
Contact:
GUO Chengbao
CLC Number:
GUO Chengbao, WANG Wenjing, TAI Ziyan. Calibration of Underwater Magnetic Sensor Array Using Magnetic Field Difference[J]. Acta Armamentarii, 2024, 45(S1): 1-9.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Schematic diagram of calibration system
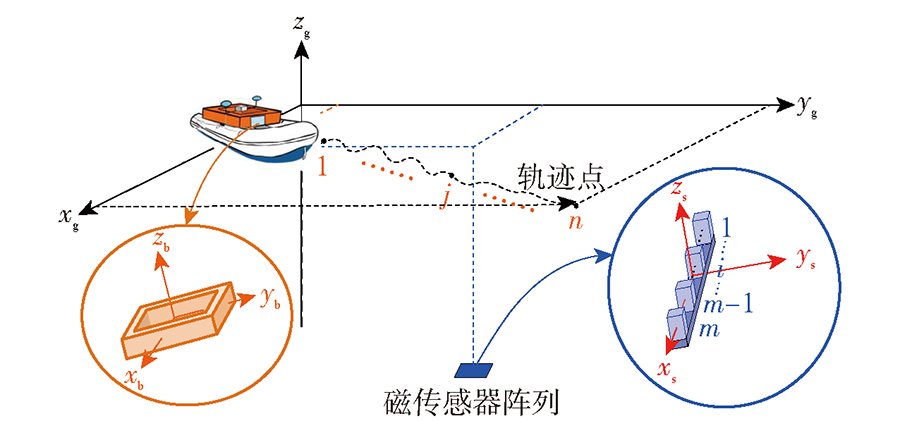
Fig.2 Coordinate systems and positional relationships
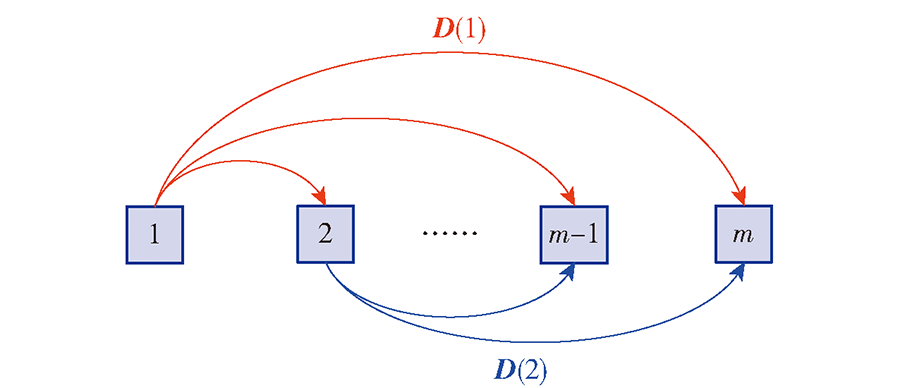
Fig.3 Schematic diagram of magnetic field difference processing for magnetic sensor array

Fig.4 Magnetic sensor array structures
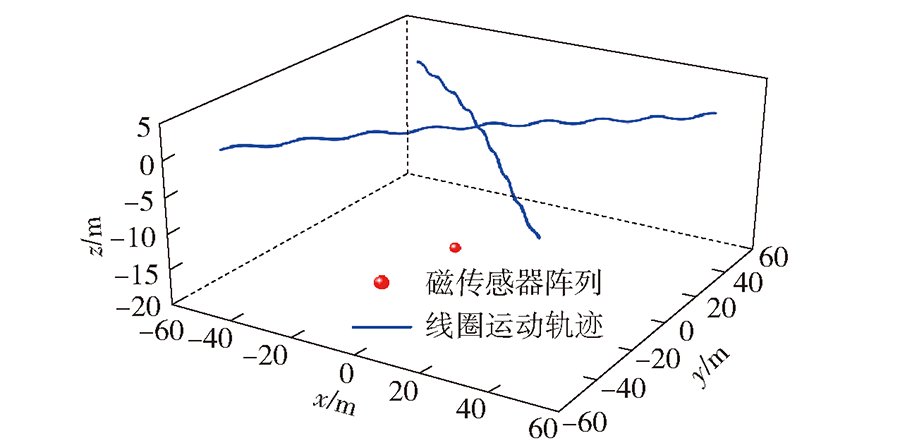
Fig.5 3D schematic diagram of coil trajectory
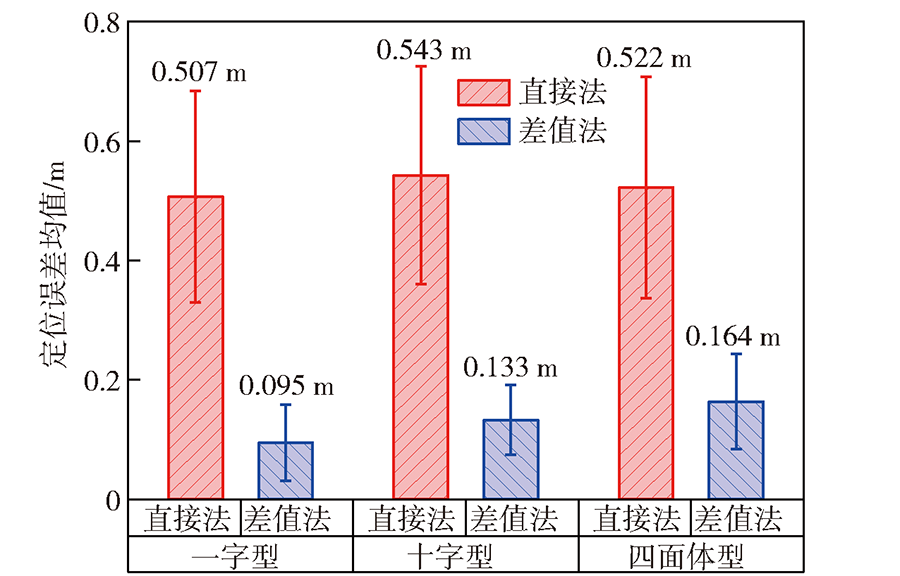
Fig.6 Comparison of the mean positioning errors of the direct method and the difference method

Fig.7 Comparison of the mean angle errors of the direct method and the difference method
| 阵列中心 | xo/m | yo/m | zo/m |
|---|---|---|---|
| O0 | 0 | 0 | -20 |
| O1 | -15 | 15 | -20 |
| O2 | 0 | 15 | -20 |
| O3 | 15 | 15 | -20 |
| O4 | 15 | 0 | -20 |
| O5 | 15 | -15 | -20 |
| O6 | 0 | -15 | -20 |
| O7 | -15 | -15 | -20 |
| O8 | -15 | 0 | -20 |
Table 1 Coordinates of array’s center
| 阵列中心 | xo/m | yo/m | zo/m |
|---|---|---|---|
| O0 | 0 | 0 | -20 |
| O1 | -15 | 15 | -20 |
| O2 | 0 | 15 | -20 |
| O3 | 15 | 15 | -20 |
| O4 | 15 | 0 | -20 |
| O5 | 15 | -15 | -20 |
| O6 | 0 | -15 | -20 |
| O7 | -15 | -15 | -20 |
| O8 | -15 | 0 | -20 |
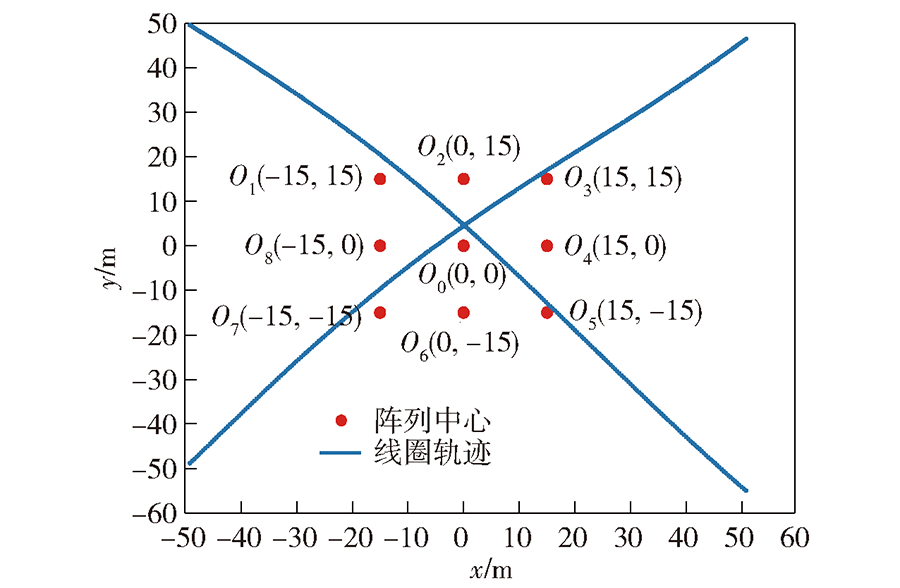
Fig.8 Positions of magnetic sensors and coil trajectory
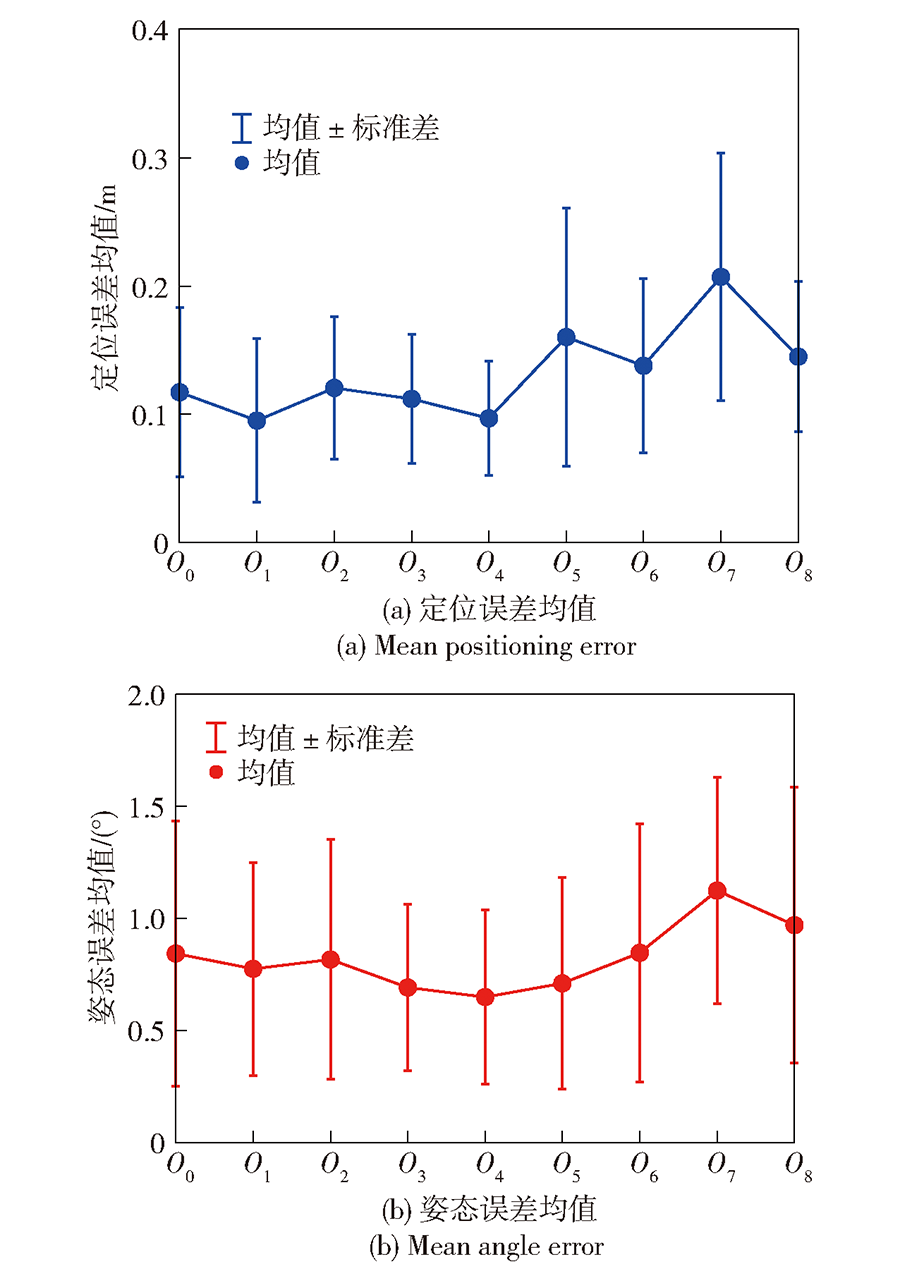
Fig.9 Error interval diagram of line-shaped array
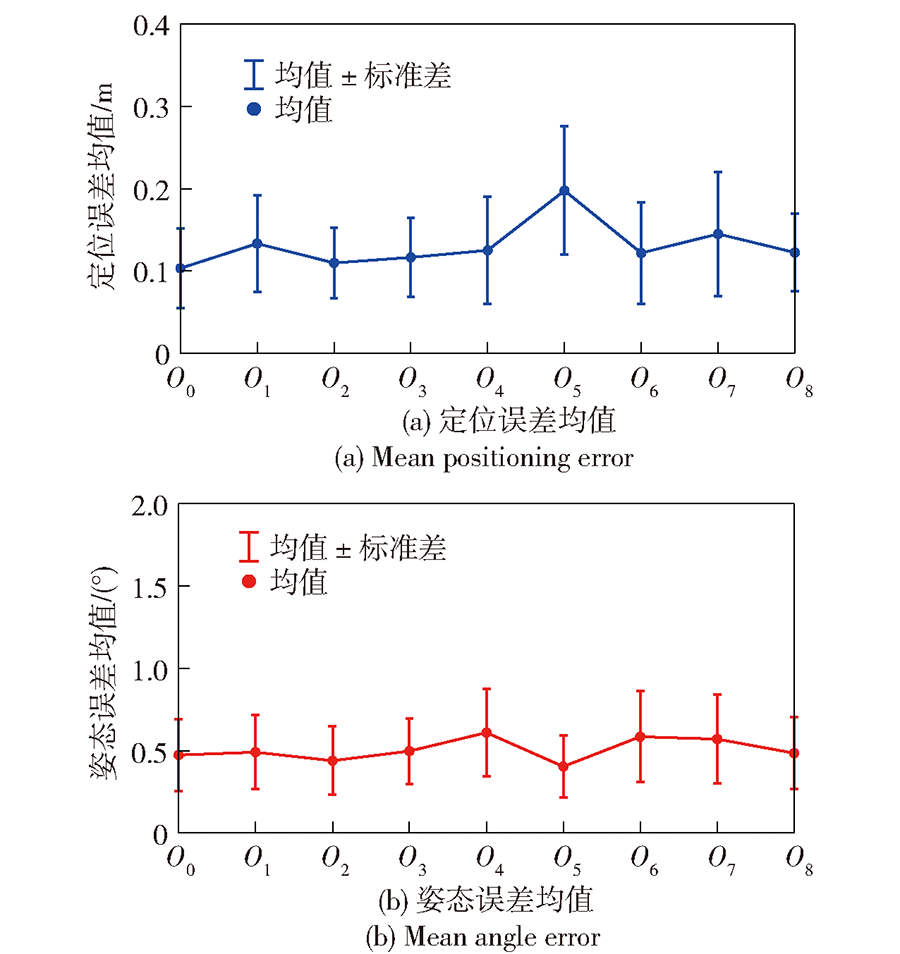
Fig.10 Error interval diagram of cross-shaped array
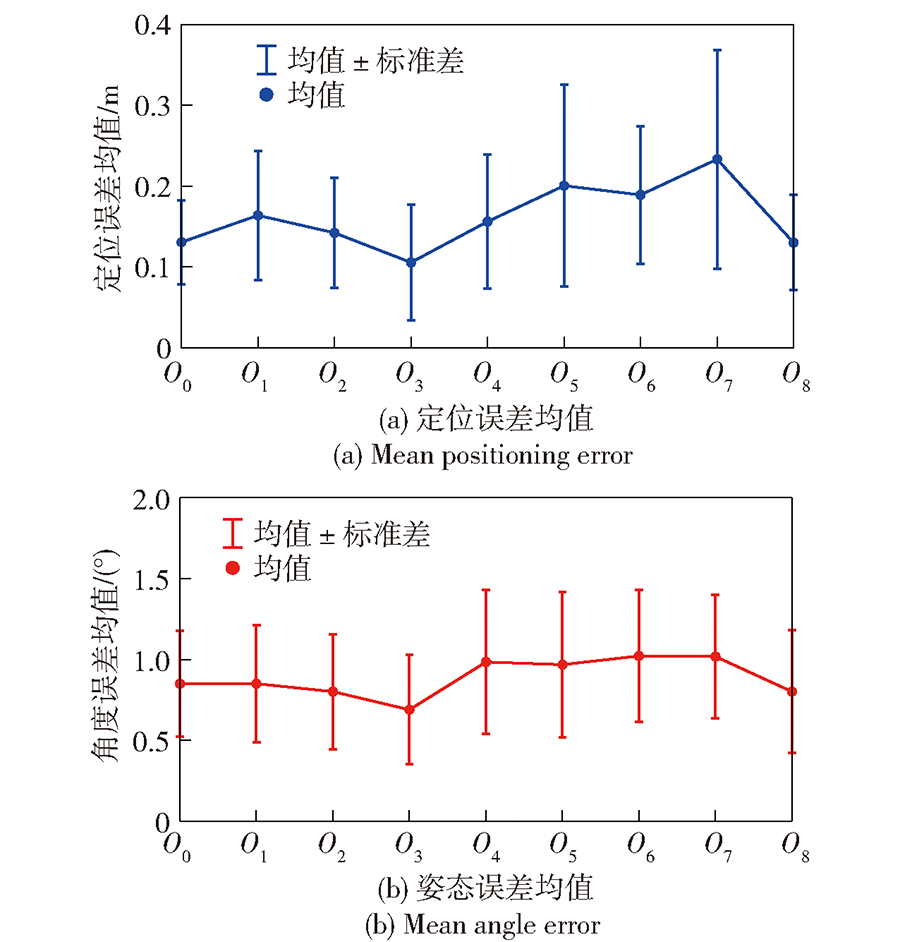
Fig.11 Error interval diagram of tetrahedron-shaped array
| 阵列位置 及均值 | 一字型 | 十字型 | 四面体型 | |||
|---|---|---|---|---|---|---|
| es/m | eo/(°) | es/m | eo/(°) | es/m | eo/(°) | |
| O0 | 0.12 | 0.84 | 0.10 | 0.47 | 0.13 | 0.85 |
| O1 | 0.10 | 0.77 | 0.13 | 0.49 | 0.16 | 0.85 |
| O2 | 0.12 | 0.82 | 0.11 | 0.44 | 0.14 | 0.80 |
| O3 | 0.11 | 0.69 | 0.12 | 0.50 | 0.11 | 0.69 |
| O4 | 0.10 | 0.65 | 0.12 | 0.61 | 0.16 | 0.98 |
| O5 | 0.16 | 0.71 | 0.20 | 0.40 | 0.20 | 0.97 |
| O6 | 0.14 | 0.85 | 0.12 | 0.59 | 0.19 | 1.02 |
| O7 | 0.21 | 1.12 | 0.14 | 0.57 | 0.23 | 1.02 |
| O8 | 0.14 | 0.97 | 0.12 | 0.48 | 0.13 | 0.80 |
| 均值 | 0.13 | 0.82 | 0.13 | 0.51 | 0.16 | 0.89 |
| 标准差 | 0.04 | 0.15 | 0.03 | 0.07 | 0.04 | 0.12 |
Table 2 Mean errors of three arrays
| 阵列位置 及均值 | 一字型 | 十字型 | 四面体型 | |||
|---|---|---|---|---|---|---|
| es/m | eo/(°) | es/m | eo/(°) | es/m | eo/(°) | |
| O0 | 0.12 | 0.84 | 0.10 | 0.47 | 0.13 | 0.85 |
| O1 | 0.10 | 0.77 | 0.13 | 0.49 | 0.16 | 0.85 |
| O2 | 0.12 | 0.82 | 0.11 | 0.44 | 0.14 | 0.80 |
| O3 | 0.11 | 0.69 | 0.12 | 0.50 | 0.11 | 0.69 |
| O4 | 0.10 | 0.65 | 0.12 | 0.61 | 0.16 | 0.98 |
| O5 | 0.16 | 0.71 | 0.20 | 0.40 | 0.20 | 0.97 |
| O6 | 0.14 | 0.85 | 0.12 | 0.59 | 0.19 | 1.02 |
| O7 | 0.21 | 1.12 | 0.14 | 0.57 | 0.23 | 1.02 |
| O8 | 0.14 | 0.97 | 0.12 | 0.48 | 0.13 | 0.80 |
| 均值 | 0.13 | 0.82 | 0.13 | 0.51 | 0.16 | 0.89 |
| 标准差 | 0.04 | 0.15 | 0.03 | 0.07 | 0.04 | 0.12 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
吕俊军, 陈凯, 苏建业, 等. 海洋中的电磁场及其应用[M]. 上海: 上海科学技术出版社, 2020: 296-300.
|
|
|
|
| [5] |
陶威. 基于磁通门阵列的水下磁性目标定位系统研究[D]. 太原: 中北大学, 2021.
|
|
|
|
| [6] |
李青竹, 李志宁, 张英堂, 等. 平面十字磁梯度张量系统的两步线性校正[J]. 仪器仪表学报, 2017, 38(9): 2232-2241.
|
|
|
|
| [7] |
郑小林, 李金, 侯文生, 等. 应用磁传感器阵列定位跟踪消化道诊疗胶囊[J]. 光学精密工程, 2009, 17(3):576-582.
|
|
|
|
| [8] |
姜天杰, 刘建强, 党熠蒲, 等. 基于磁通门阵列的被动式救援井探测定位系统研究[J]. 石化技术, 2021, 28(1): 65-67.
|
|
|
|
| [9] |
张琪, 张英堂, 李志宁, 等. 基于一字形传感器阵列的磁性目标定位方法[J]. 装甲兵工程学院学报, 2018, 32(4):74-79.
|
|
|
|
| [10] |
李青竹, 李志宁, 张英堂, 等. 磁梯度张量系统传感器阵列的快速旋转校准[J]. 光学精密工程, 16(7):1813-1826.
|
|
|
|
| [11] |
郭成豹, 刘大明, 肖昌汉, 等. 一种磁传感器定位方法: 中国, 201210227393.0 [P]. 2015-07-22.
|
|
|
|
| [12] |
郭成豹, 王文井, 台秭艳. 水下磁传感器定位定姿数值验证实验研究[J]. 中国舰船研究. 2023, 18(6): 238-246.
|
|
|
|
| [13] |
郭成豹, 王文井, 台秭艳. 水下磁传感器校准装置场地试验样机研究与实验[J]. 舰船科学技术, 2023, 45(22):160-168.
|
|
|
|
| [14] |
|
| [15] |
郭成豹, 胡松, 王文井, 等. 利用磁传感器阵列磁场差值的舰船磁场反演建模方法[J]. 兵工学报, 2022, 43(1): 111-119.
doi: 10.3969/j.issn.1000-1093.2022.01.012 |
|
doi: 10.3969/j.issn.1000-1093.2022.01.012 |
|
| [16] |
|
| [17] |
|
| [18] |
严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019: 244-245.
|
|
|
|
| [19] |
赵鹤达, 林春生, 张宏欣, 等. 多个三轴传感器非对准误差校正方法[J]. 仪器仪表学报, 2018, 39(12): 144-151.
|
|
|
|
| [20] |
|
| [1] | WUBULIAISAN Maimaitituersun, WU Yanqing, HOU Xiao, YIN Xinmei, ZHANG Xin. On the Determination of Viscoelastic Model Parameters and Microstructural Damage Evolution of Solid Propellants [J]. Acta Armamentarii, 2024, 45(4): 1038-1046. |
| [2] | DUAN Hao, CHEN Hui, ZHAI Zhaoyang, HAN Yu, MA Fanhua, CUI Yahui. Performance Prediction of Hydrogen-enriched Compressed Natural Gas Engine Based on Support Vector Machine [J]. Acta Armamentarii, 2022, 43(5): 1002-1011. |
| [3] | WU Qian, GUO Weiguo. Calibration of Sensitivity Coefficient of Three-dimensional High-g Accelerometer Based on Vector Decomposition [J]. Acta Armamentarii, 2021, 42(7): 1535-1543. |
| [4] | JING Wenbo, HUANG Bingkun, LIU Jian, YU Hongyang. Calibration of Different-source Cameras for Laser Irradiation Performance Measurement [J]. Acta Armamentarii, 2020, 41(5): 924-931. |
| [5] | YANG Guanjinzi, LI Jianchen, HUANG Hai, GUO Linna. Non-turntable Field-calibration Method for Gyroscope Based on Optimal Analysis [J]. Acta Armamentarii, 2020, 41(3): 577-584. |
| [6] | ZHANG Sen, GUO Jinbiao, WU Yuanyuan. Calibration Algorithm for Underwater Navigation System Based on Rodrigues Matrix Transformation [J]. Acta Armamentarii, 2020, 41(2): 342-349. |
| [7] | WANG Qi, WANG Lixin, LIANG Shuhui, QIN Weiwei, SHEN Qiang. Selection of System Models for Continuous Self-calibration of Hybrid Inertial Navigation System Based on Observability Analysis [J]. Acta Armamentarii, 2020, 41(1): 56-67. |
| [8] | ZHOU Quan, YAO Minli, SHEN Xiaowei. Research on Field Calibration Method for MEMS Accelerometer Based on Support Ellipsoid Fitting [J]. Acta Armamentarii, 2020, 41(1): 68-74. |
| [9] | DONG Chunmei, REN Shunqing, CHEN Xijun, LI Wei. A System-level Calibration Method for Laser Gyro SINS [J]. Acta Armamentarii, 2019, 40(8): 1618-1626. |
| [10] | YUAN Dongming, DING Yalin, ZHANG Jian. Calibration of Seeker Angle-measuring Error with Block Three-order Polynomial [J]. Acta Armamentarii, 2019, 40(10): 2042-2049. |
| [11] | WANG Da-peng, JIN Xing, ZHOU Wei-jing, LI Nan-lei. Analysis of Plate Non-parallelism Error of Capacitance Displacement Sensor in Thrust Measurement of Space-borneMicro-thruster [J]. Acta Armamentarii, 2018, 39(4): 816-824. |
| [12] | JU Tan, YU Ji-yan, WANG Xiao-ming, GU Xiao-hui. A Calibration Method of Magnetometer-aided Two-axis Gyro Sensor in the Projectile-borne Environment [J]. Acta Armamentarii, 2018, 39(10): 1919-1926. |
| [13] | WU Ming, ZHANG Guo-liang, LI Lin-lin, FU Guang-yuan, LI Cheng-jian. Muli-sensor Calibration Optimization Method of Mobile Robot Based on Stationary and Moving Object Observation ConsistencyConstraint [J]. Acta Armamentarii, 2017, 38(8): 1630-1641. |
| [14] | WANG Kun-ming, XIE Jian, ZHOU Zhao-fa. Calibration Method of Dimension Error of Accelerometer in Single-axial Rotation SINS [J]. Acta Armamentarii, 2017, 38(7): 1314-1321. |
| [15] | WANG Jie, XIONG Zhi, XING Li, DAI Yi-jie, HUA Bing, LIU Jian-ye. Online Calibration of IMU errors of Inertial Navigation System Based on Innovation-based Adaptive Filtering [J]. Acta Armamentarii, 2016, 37(7): 1203-1213. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||