
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (5): 1402-1415.doi: 10.12382/bgxb.2022.1237
Previous Articles Next Articles
CHEN Tairan1,2, GENG Hao1, WANG Dian1, QIU Sicong3,*( ), SUN Xuguang3
), SUN Xuguang3
Received:2022-12-09
Online:2023-07-02
Contact:
QIU Sicong
CLC Number:
CHEN Tairan, GENG Hao, WANG Dian, QIU Sicong, SUN Xuguang. Research on the Real-time Simulation System for Hydrodynamic Characteristics of Amphibious Vehicle[J]. Acta Armamentarii, 2024, 45(5): 1402-1415.
Add to citation manager EndNote|Ris|BibTeX
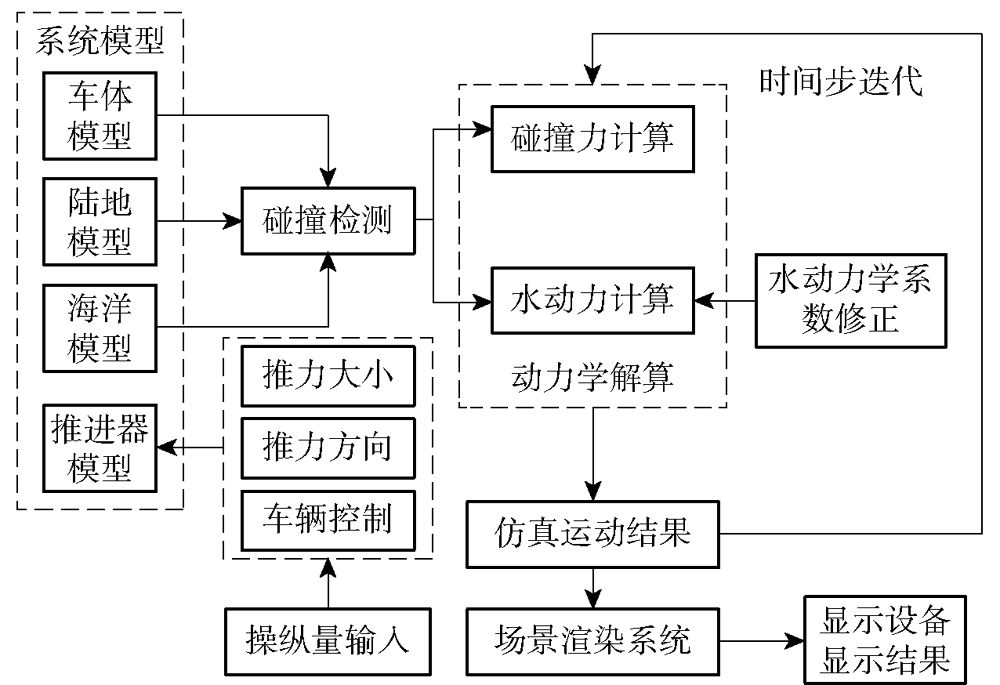
Fig.1 Flow chart of real-time simulation
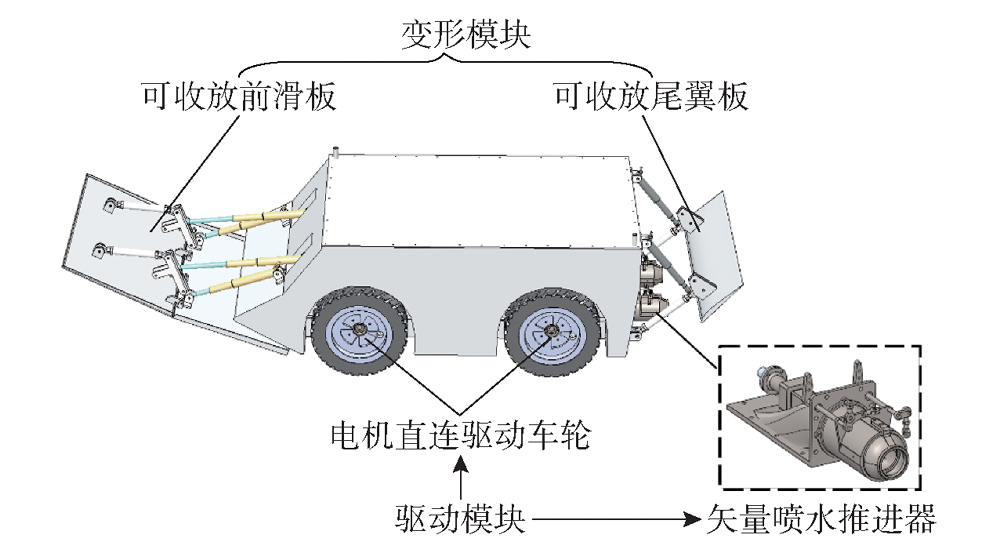
Fig.2 Schematic diagram of the whole vehicle function
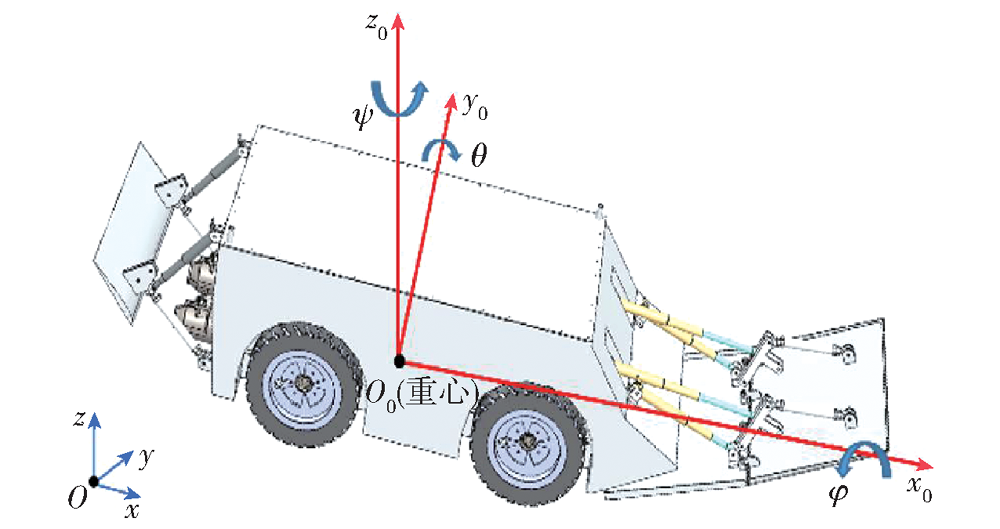
Fig.3 Schematic diagram of coordinate system
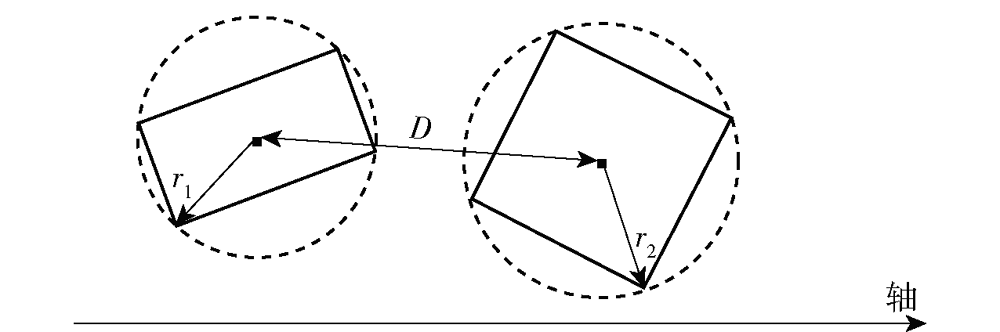
Fig.4 Schematic diagram of OBB surround box collision detection[18]
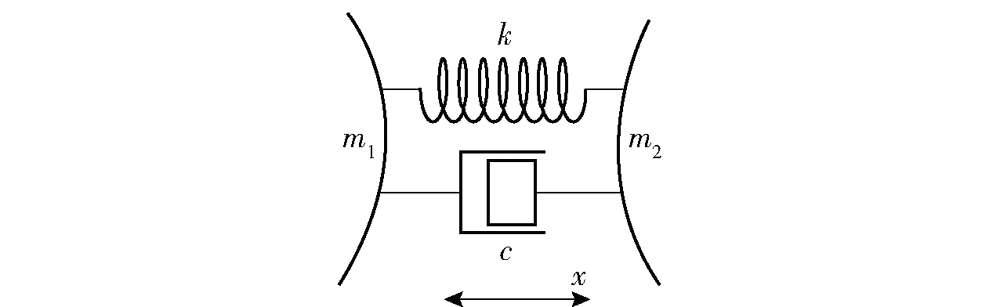
Fig.5 Spring damping model[22]
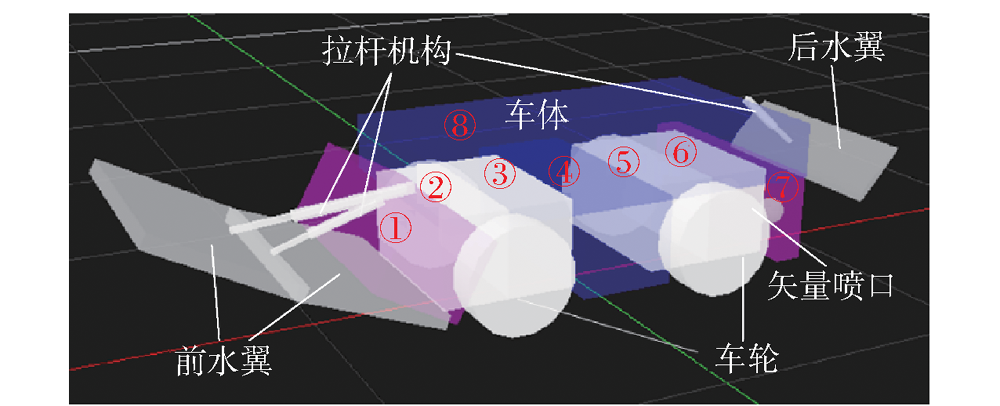
Fig.6 Schematic diagram of amphibious vehicle entity division
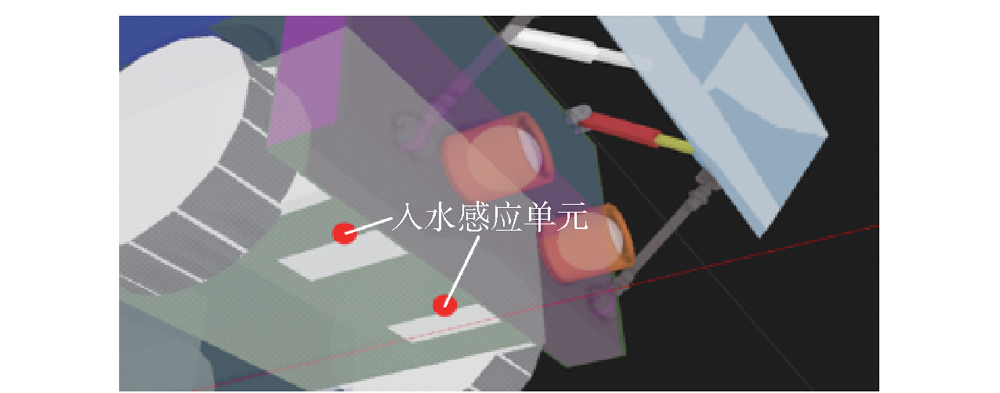
Fig.7 Water ingress detection unit
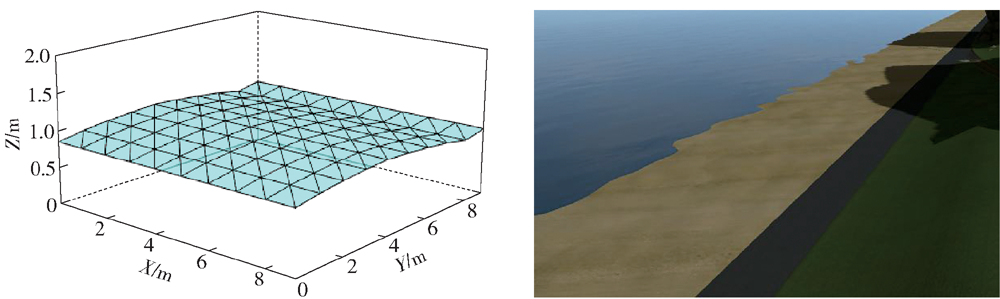
Fig.8 Water surface simulation scene (left) and water-land interface simulation scene (right)

Fig.9 Motion attitudes of amphibious vehicles (4s acceleration stop)

Fig.10 Comparison of movement postures of amphibious vehicles
| 实体 | 阻力系数 | 浮力系数 | 升力系数 |
|---|---|---|---|
| 前滑板1 | 0.80 | 1.00 | 1.50 |
| 前滑板2 | 0.80 | 1.00 | 1.50 |
| 车身1 | 1.00 | 1.00 | 1.00 |
| 车身2 | 0.00 | 1.00 | 0.50 |
| 车身3 | 0.00 | 1.00 | 0.50 |
| 车身4 | 0.20 | 1.00 | 0.50 |
| 车身5 | 0.00 | 1.00 | 0.50 |
| 车身6 | 0.00 | 1.00 | 0.50 |
| 车身7 | 0.20 | 1.00 | 0.50 |
| 车身8 | 1.00 | 1.00 | 1.00 |
| 前轮 | 0.60 | 0.90 | 0.75 |
| 后轮 | 0.60 | 0.90 | 0.75 |
| 后水翼 | 0.90 | 1.10 | 1.40 |
| 拉杆组1 | 0.00 | 0.00 | 0.00 |
| 拉杆组2 | 0.00 | 0.00 | 0.00 |
| 拉杆组3 | 0.00 | 0.00 | 0.00 |
Table 1 Amphibious vehicle dynamics coefficient setting
| 实体 | 阻力系数 | 浮力系数 | 升力系数 |
|---|---|---|---|
| 前滑板1 | 0.80 | 1.00 | 1.50 |
| 前滑板2 | 0.80 | 1.00 | 1.50 |
| 车身1 | 1.00 | 1.00 | 1.00 |
| 车身2 | 0.00 | 1.00 | 0.50 |
| 车身3 | 0.00 | 1.00 | 0.50 |
| 车身4 | 0.20 | 1.00 | 0.50 |
| 车身5 | 0.00 | 1.00 | 0.50 |
| 车身6 | 0.00 | 1.00 | 0.50 |
| 车身7 | 0.20 | 1.00 | 0.50 |
| 车身8 | 1.00 | 1.00 | 1.00 |
| 前轮 | 0.60 | 0.90 | 0.75 |
| 后轮 | 0.60 | 0.90 | 0.75 |
| 后水翼 | 0.90 | 1.10 | 1.40 |
| 拉杆组1 | 0.00 | 0.00 | 0.00 |
| 拉杆组2 | 0.00 | 0.00 | 0.00 |
| 拉杆组3 | 0.00 | 0.00 | 0.00 |
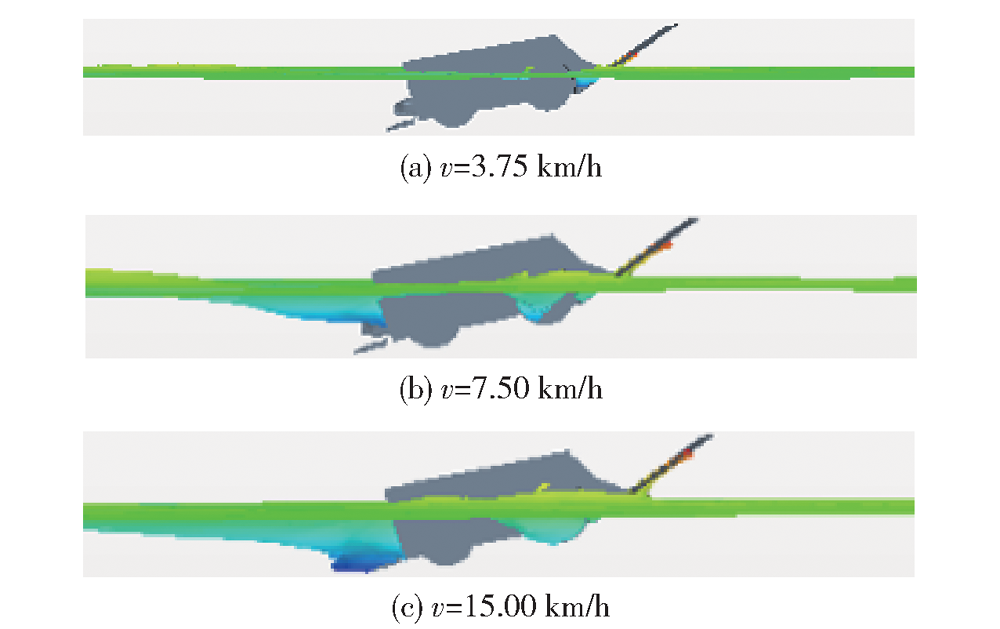
Fig.11 Side view of vehicle attitude
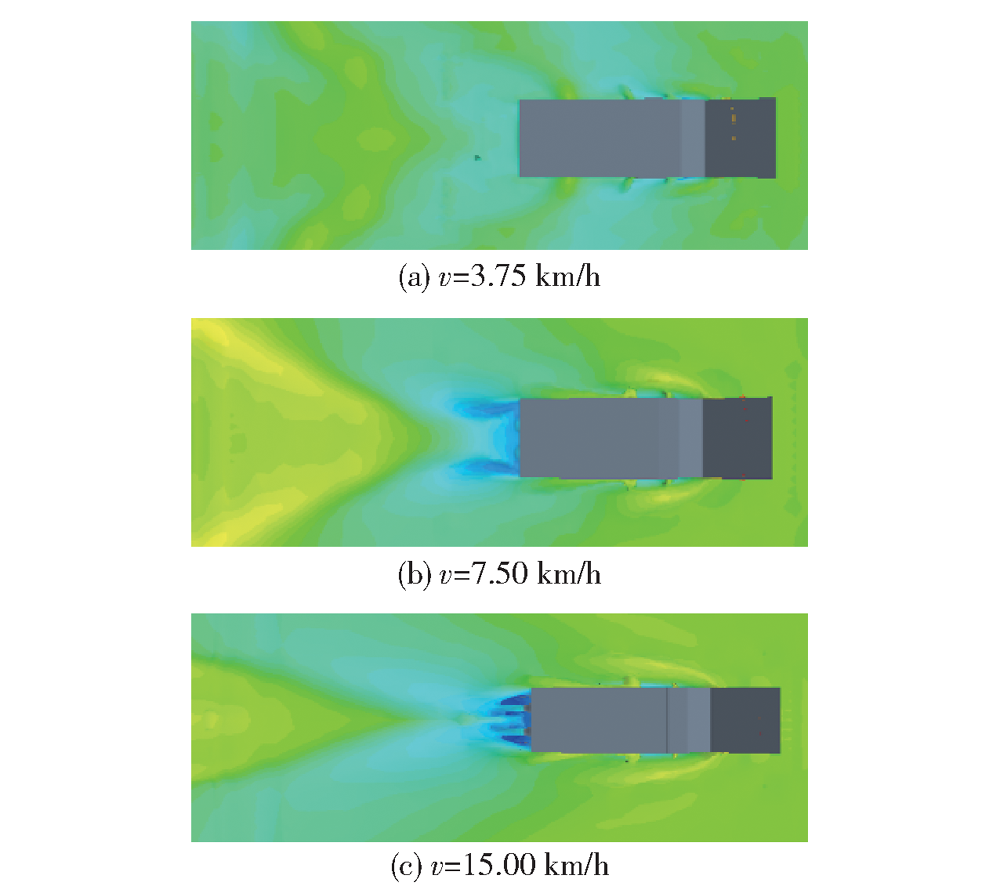
Fig.12 Top view of vehicle outflow field
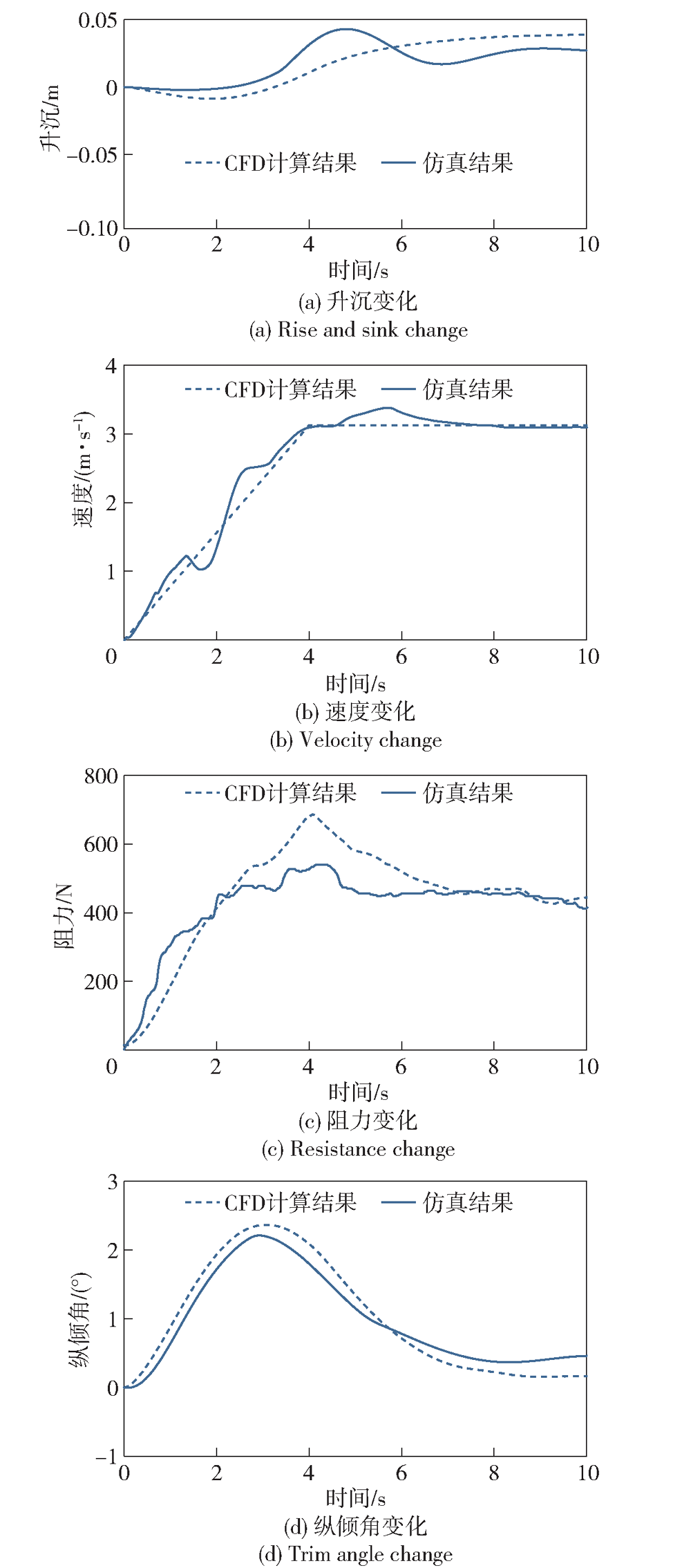
Fig.13 Comparison of experimental results of validation groups

Fig.14 General diagram of test vehicle
| 技术内容 | 指标要求 |
|---|---|
| 车体尺寸(陆地状态)/mm | 1 665×820×600 |
| 车体尺寸(水面状态) | 2 800×820×600 |
| 全车整备质量/kg | 250 |
| 陆上最高时速/(km·h-1) | 14 |
| 水上最高时速/(km·h-1) | 20 |
| 推进器喷口最大转角/(°) | 20 |
| 轮胎驱动方式 | 电机独立驱动 |
| 试验车操控方式 | 平板远程遥控 |
| 全车防水等级 | 全车IP68 |
Table 2 Main technical indicators of experimental vehicle
| 技术内容 | 指标要求 |
|---|---|
| 车体尺寸(陆地状态)/mm | 1 665×820×600 |
| 车体尺寸(水面状态) | 2 800×820×600 |
| 全车整备质量/kg | 250 |
| 陆上最高时速/(km·h-1) | 14 |
| 水上最高时速/(km·h-1) | 20 |
| 推进器喷口最大转角/(°) | 20 |
| 轮胎驱动方式 | 电机独立驱动 |
| 试验车操控方式 | 平板远程遥控 |
| 全车防水等级 | 全车IP68 |

Fig.15 Comparison of the shapes of a simulated vehicle (left) and an experimental vehicle (right)
| 参数 | 实时仿真模型 | 两栖试验车 |
|---|---|---|
| 整车尺寸(陆地状态)/mm | 1 665×820×600 | 1 665×820×600 |
| 整车尺寸/(减阻状态)/mm | 2 800×820×600 | 2 800×820×600 |
| 整备质量/kg | 250 | 250 |
| 推进器额定输出推力/N | 400×2 | 518.3×2 |
| 车轮额定输出转矩/(N·m) | 6×4 | 6×4 |
Table 3 Physical parameter comparison
| 参数 | 实时仿真模型 | 两栖试验车 |
|---|---|---|
| 整车尺寸(陆地状态)/mm | 1 665×820×600 | 1 665×820×600 |
| 整车尺寸/(减阻状态)/mm | 2 800×820×600 | 2 800×820×600 |
| 整备质量/kg | 250 | 250 |
| 推进器额定输出推力/N | 400×2 | 518.3×2 |
| 车轮额定输出转矩/(N·m) | 6×4 | 6×4 |

Fig.16 Real view of test site
| 编号 | 行驶 方向 | 加速 时间/s | 最高航速/ (km·h-1) | 组数 | 测量物理量 |
|---|---|---|---|---|---|
| Ⅰ | 南 | 4 | 3.75 | 4 | 航速、纵倾角 |
| Ⅱ | 南 | 4 | 7.50 | 4 | 航速、纵倾角 |
| Ⅲ | 南 | 4 | 11.25 | 4 | 航速、纵倾角 |
| Ⅳ | 南 | 4 | 15.00 | 4 | 航速、纵倾角 |
Table 4 Design of linear acceleration test
| 编号 | 行驶 方向 | 加速 时间/s | 最高航速/ (km·h-1) | 组数 | 测量物理量 |
|---|---|---|---|---|---|
| Ⅰ | 南 | 4 | 3.75 | 4 | 航速、纵倾角 |
| Ⅱ | 南 | 4 | 7.50 | 4 | 航速、纵倾角 |
| Ⅲ | 南 | 4 | 11.25 | 4 | 航速、纵倾角 |
| Ⅳ | 南 | 4 | 15.00 | 4 | 航速、纵倾角 |
| 编号 | 最高航速/ (km·h-1) | 矢量喷口 转角/(°) | 组数 | 测量值 |
|---|---|---|---|---|
| Ⅰ | 3.75 | 右20 | 3 | 航速、航迹 |
| Ⅱ | 7.50 | 右20 | 3 | 航速、航迹 |
| Ⅲ | 11.25 | 右20 | 3 | 航速、航迹 |
| Ⅳ | 15.00 | 右20 | 3 | 航速、航迹 |
Table 5 Design of steering test
| 编号 | 最高航速/ (km·h-1) | 矢量喷口 转角/(°) | 组数 | 测量值 |
|---|---|---|---|---|
| Ⅰ | 3.75 | 右20 | 3 | 航速、航迹 |
| Ⅱ | 7.50 | 右20 | 3 | 航速、航迹 |
| Ⅲ | 11.25 | 右20 | 3 | 航速、航迹 |
| Ⅳ | 15.00 | 右20 | 3 | 航速、航迹 |
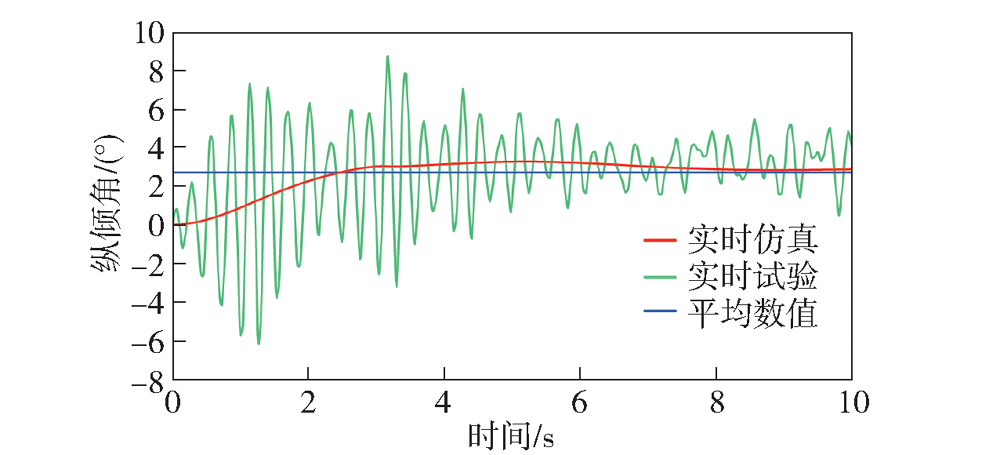
Fig.17 Comparison of the results of TestⅠ
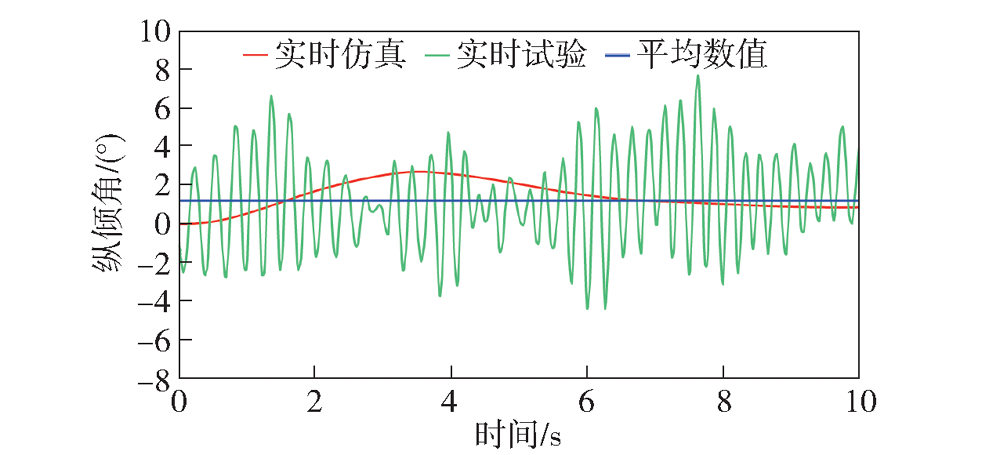
Fig.18 Comparison of the results of Test Ⅲ

Fig.19 Test navigation track

Fig.20 Simulation navigation track
| [1] |
|
| [2] |
王少新, 金国庆, 王涵, 等. 双车厢两栖车静水直航下的水动力性能研究[J]. 兵工学报, 2020, 41(3):434-441.
doi: 10.3969/j.issn.1000-1093.2020.03.003 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.003 |
|
| [3] |
剧冬梅, 项昌乐, 陶溢, 等. 电驱动差速转向轮式水陆两栖车辆可收放悬架机构运动学分析与参数优化[J]. 兵工学报, 2019, 40(8):1580-1586.
doi: 10.3969/j.issn.1000-1093.2019.08.004 |
|
|
|
| [4] |
徐一新. 基于运动特性的两栖车辆关键技术研究[D]. 镇江: 江苏科技大学, 2013.
|
|
|
|
| [5] |
赵彬. 基于动网格的两栖车航行特性数值模拟研究[D]. 北京: 北京理工大学, 2015.
|
|
|
|
| [6] |
王少新, 王涵, 金国庆, 等. 水陆两栖车水动力性能与防浪板受力特性研究[J]. 兵器装备工程学报, 2020, 41(1):1-6. Study on hydrodynamic performance of amphibious
|
|
|
|
| [7] |
剧冬梅, 项昌乐, 李军, 等. 两栖车辆实时控制水陆性能虚拟试验系统开发[J]. 兵工学报, 2014, 35(6):879-884.
doi: 10.3969/j.issn.1000-1093.2014.06.019 |
|
|
|
| [8] |
李向阳, 汪潇, 张志利, 等. 基于虚实结合的特装车辆驾驶训练模拟系统[J]. 系统仿真学报, 2021, 33(12):2919-2934.
doi: 10.16182/j.issn1004731x.joss.21-FZ0765 |
|
doi: 10.16182/j.issn1004731x.joss.21-FZ0765 |
|
| [9] |
马利忠, 卞永明, 季鹏成, 等. 基于RTWT的机械臂实时仿真系统平台[J]. 机电一体化, 2022, 28(增刊1):57-62,88.
|
|
|
|
| [10] |
刘云钦, 李妮, 赵路明, 等. 高超声速飞行器流热固耦合实时仿真技术[J]. 系统仿真学报, 2021, 33(12):2820-2827.
doi: 10.16182/j.issn1004731x.joss.21-FZ0838 |
|
doi: 10.16182/j.issn1004731x.joss.21-FZ0838 |
|
| [11] |
刘建磊, 焦学健, 王怀谦. 基于CarSim的车辆动力学虚拟仿真系统开发[J]. 系统仿真学报, 2022, 34(8):1847-1854.
doi: 10.16182/j.issn1004731x.joss.21-0300 |
|
doi: 10.16182/j.issn1004731x.joss.21-0300 |
|
| [12] |
赵雪. 汽车半实物模拟驾驶系统设计[D]. 重庆: 重庆理工大学, 2017.
|
|
|
|
| [13] |
张林, 张权, 易涤非, 等. 海洋油气平台智能巡检机器人云台臂的设计与仿真研究[J]. 海洋工程装备与技术2022, 9(4):34-40.
|
|
|
|
| [14] |
林强, 徐小军, 邹腾安. 一种水陆两栖车的增程式动力系统设计与仿真[J]. 机电技术, 2018(5):72-76.
|
|
|
|
| [15] |
杨柏年. 水陆两栖车辆运行姿态及重心实时监测系统开发[D]. 武汉: 华中科技大学, 2021.
|
|
|
|
| [16] |
王涛, 徐国英. 两栖车辆水上动态性能数值模拟方法及其应用[M]. 北京: 国防工业出版社, 2009.
|
|
|
|
| [17] |
谭同德, 吴强, 赵红领, 等. OBB层次包围盒构造方法的改进[J]. 计算机工程与应用, 2008, 44(5):79-81,95.
|
|
|
|
| [18] |
董明晓, 郑康平. 一种快速求取空间任意两条曲线交点的算法[J]. 机械设计与制造, 2004(5):55-56.
|
|
|
|
| [19] |
安雪斌, 潘尚峰. 多体系统动力学仿真中的接触碰撞模型分析[J]. 计算机仿真, 2008(10):98-101.
|
|
|
|
| [20] |
周志才, 吴新跃, 张文群, 等. 基于弹簧阻尼模型的碰撞动力学研究[J]. 湖北工业大学学报, 2012, 27(1):125-128.
|
|
|
|
| [21] |
|
| [22] |
|
| [23] |
鲁航. 矢量喷水推进两栖车辆航行特性研究[D]. 北京: 北京理工大学, 2022.
|
|
|
| [1] | HUANG Yan-bin, ZHOU Ke-ke, BA Guo-zhao, SHI Xiao-jun, LIU Qian. The Corrosion Status of Amphibious Vehicles along the Coast and Integrated Corrosion Control Technology [J]. Acta Armamentarii, 2016, 37(7): 1291-1298. |
| [2] | ZHAO Bin, ZHANG Min-di, JU Dong-mei. Numerical Simulation of Navigating Pose for Amphibious Vehicle based on Dynamic-mesh Model [J]. Acta Armamentarii, 2015, 36(3): 412-420. |
| [3] | JU Dong-mei, XIANG Chang-le, ZHOU Peng-fei, XIAO Nan-xi, LIU Jing. Analysis of the Effect of Trim Angle on the Resistance Characteristics for Wheeled Amphibious Vehicle [J]. Acta Armamentarii, 2015, 36(1): 19-26. |
| [4] | LI Fu-yuan, ZHANG Yu-wen, DANG Jian-jun, TENG Peng-hua. Research on Hydrodynamic Characteristics of Conical Cavitator [J]. Acta Armamentarii, 2014, 35(7): 1040-1044. |
| [5] | JU Dong-mei, XIANG Chang-le, LI Jun, SUN Xu-guang, LIU Jing. Development of Virtual Test System for Real-time Control and Performance of Amphibious Vehicle [J]. Acta Armamentarii, 2014, 35(6): 879-884. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||