
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (1): 203-213.doi: 10.12382/bgxb.2022.0764
Special Issue: 特种车辆理论与技术
Previous Articles Next Articles
YUAN Yi1,2, GAI Jiangtao1,2,*( ), ZHOU Guangming1,2, GAO Xiucai3, LI Xunming1,2, MA Changjun1,2
), ZHOU Guangming1,2, GAO Xiucai3, LI Xunming1,2, MA Changjun1,2
Received:2022-09-15
Online:2023-02-10
Contact:
GAI Jiangtao
CLC Number:
YUAN Yi, GAI Jiangtao, ZHOU Guangming, GAO Xiucai, LI Xunming, MA Changjun. Analysis of High-Speed Electric Tracked Vehicle’s Handling Characteristics[J]. Acta Armamentarii, 2023, 44(1): 203-213.
Add to citation manager EndNote|Ris|BibTeX
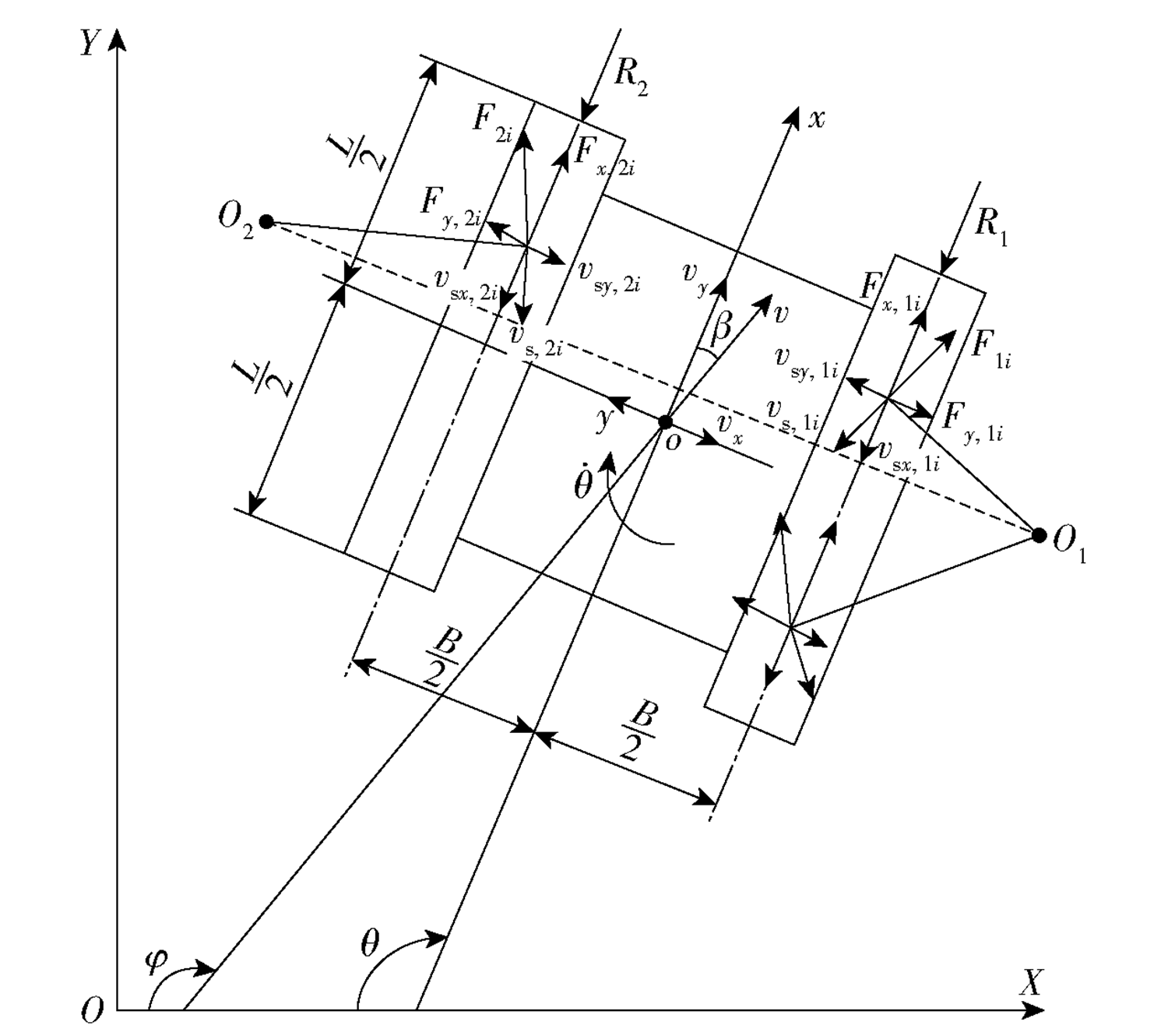
Fig.1 Diagram of plane motion for steering of tracked vehicle
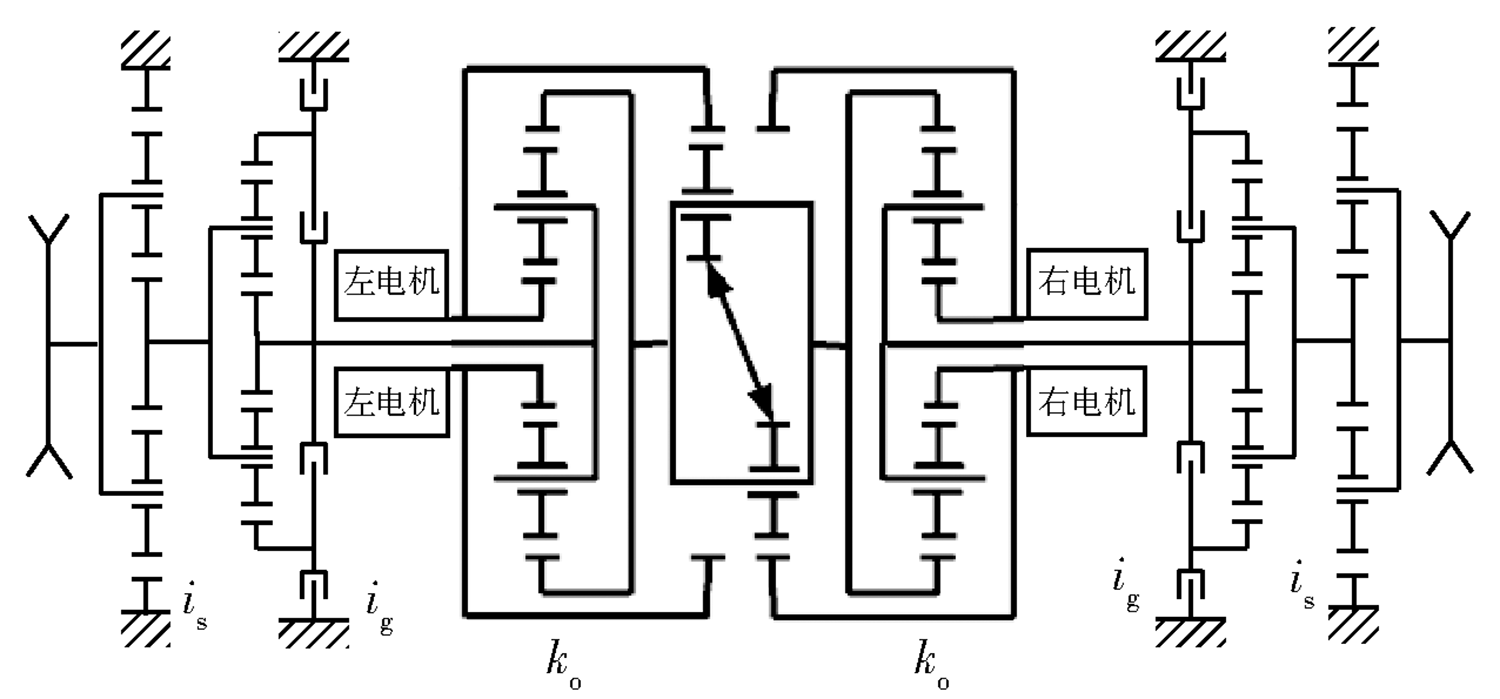
Fig.2 Structural diagram of the electric driver

Fig.3 Block diagram of the electric tracked vehicle
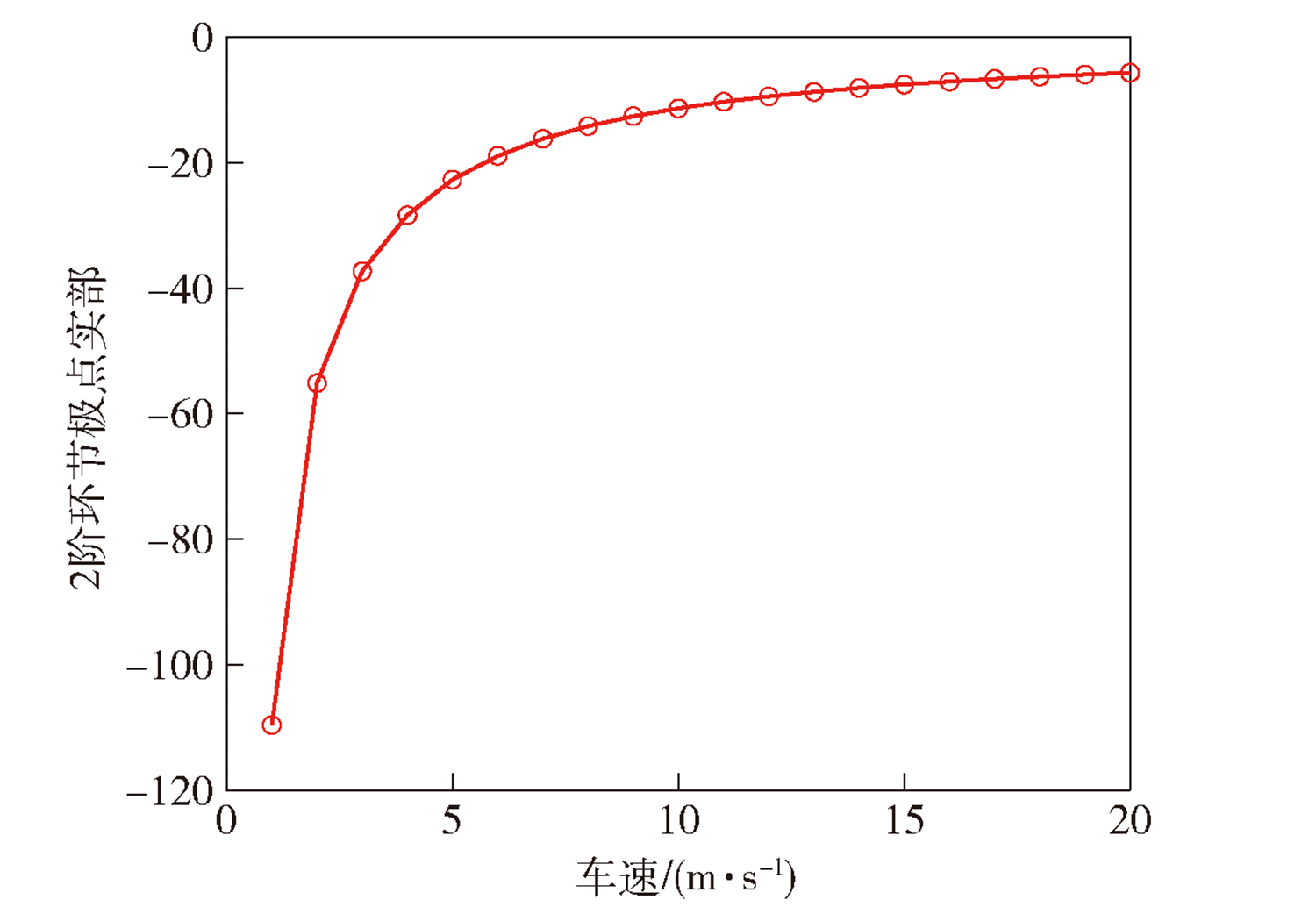
Fig.4 Relationship between the real part of the pole of the second-order link and the vehicle speed
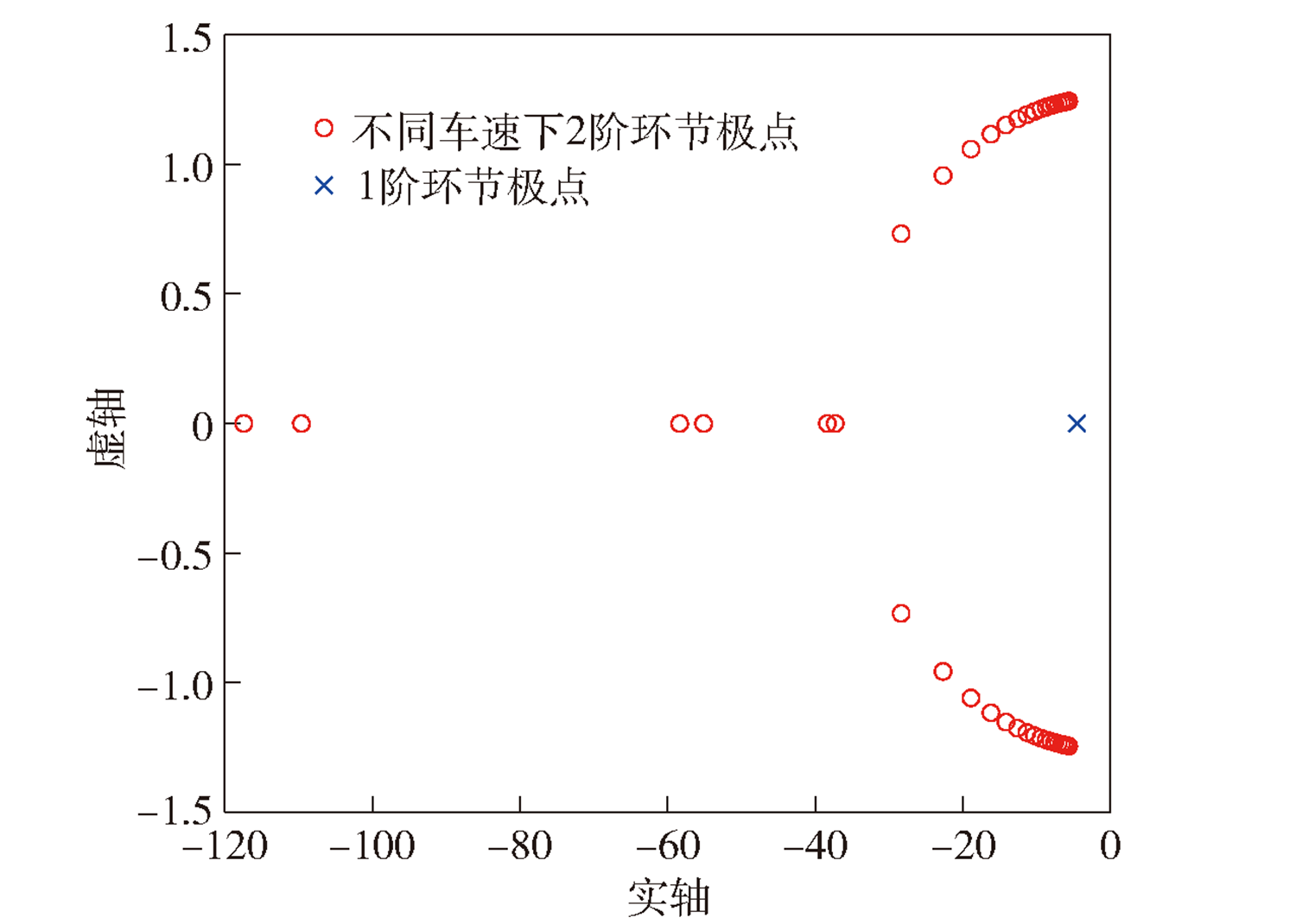
Fig.5 System poles
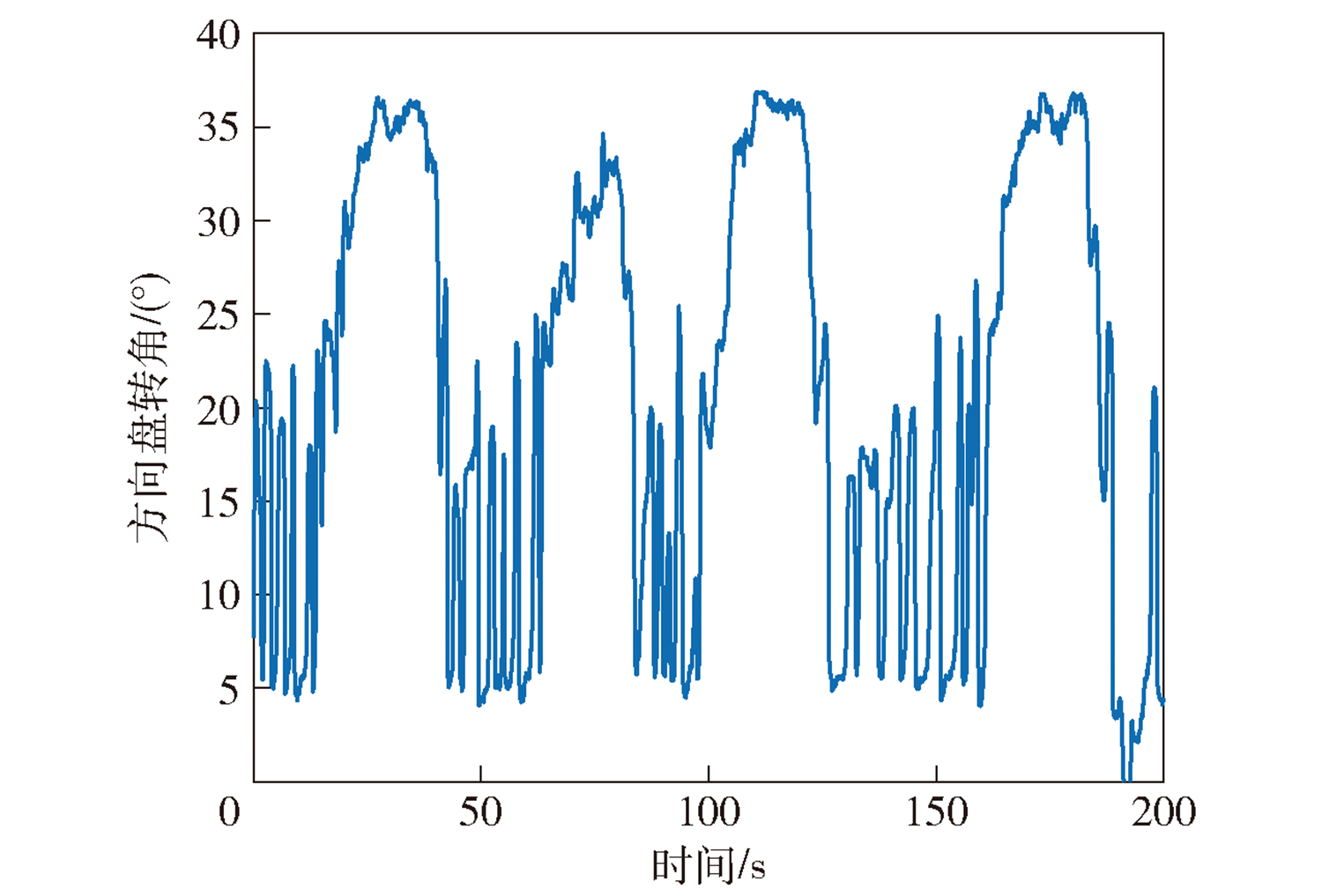
Fig.6 Steering wheel angle
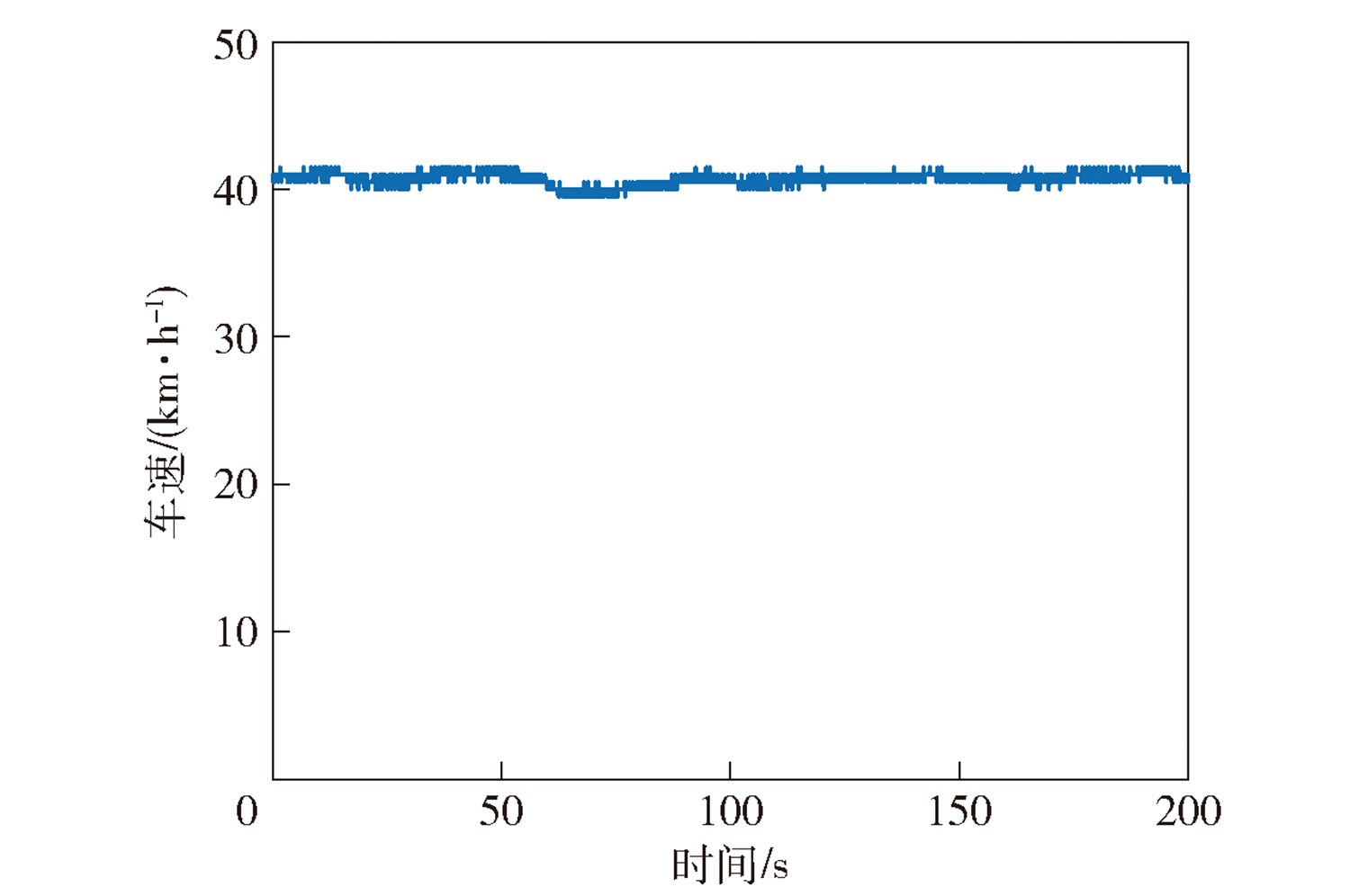
Fig.7 Vehicle speed
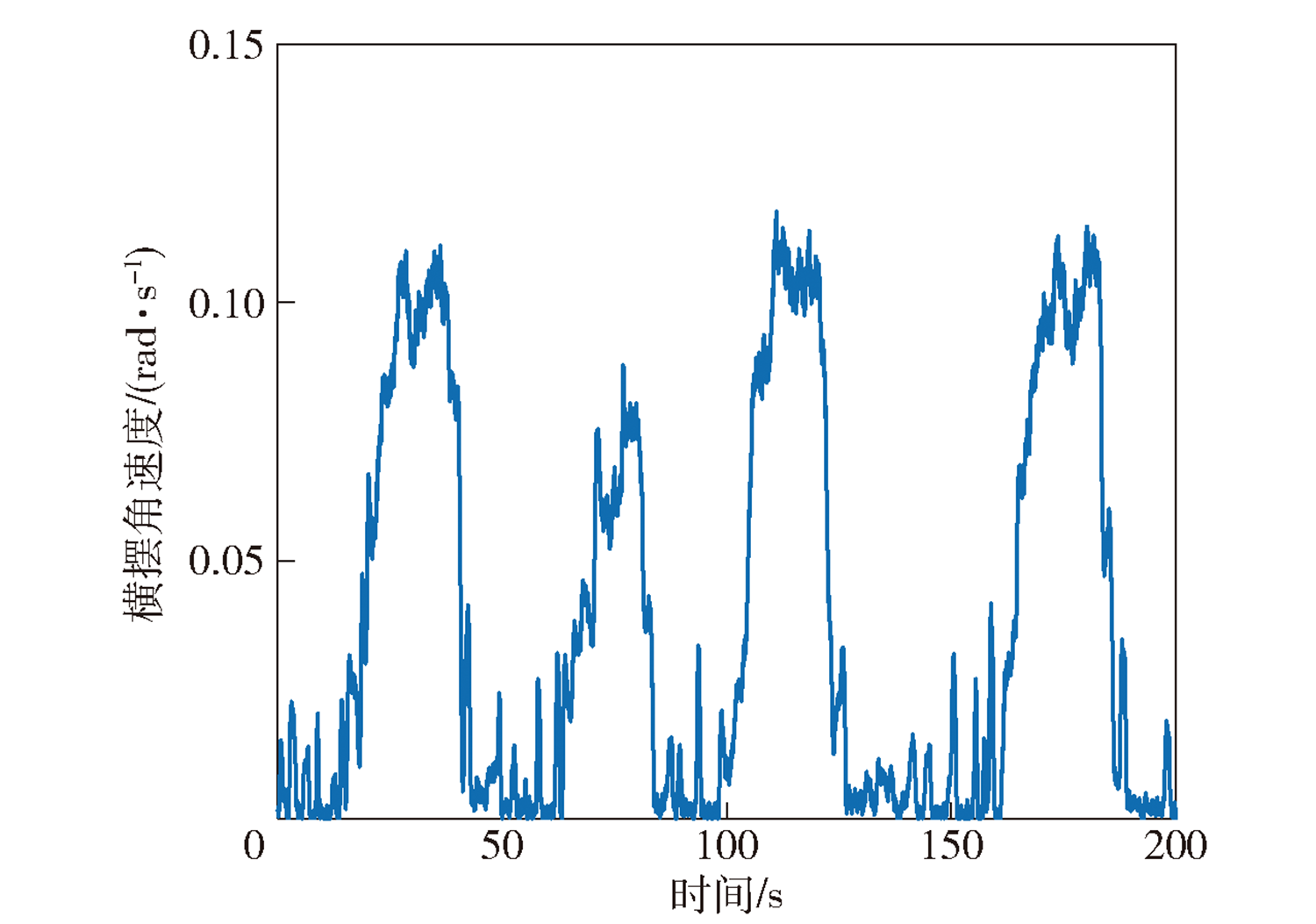
Fig.8 Yaw rate of the electric tracked vehicle
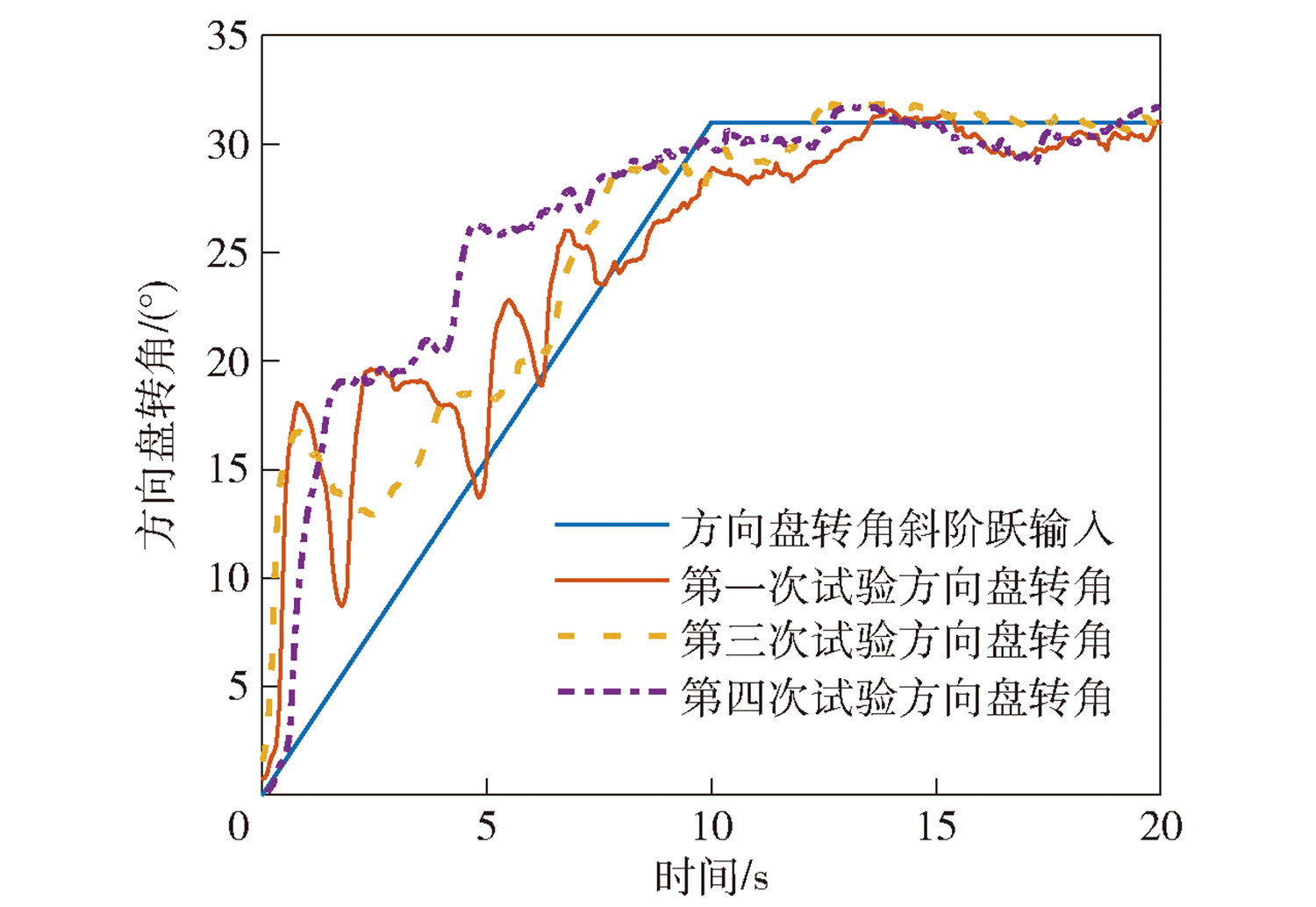
Fig.9 Comparison between ramp step input of steering wheel angle and test data of steering wheel angle
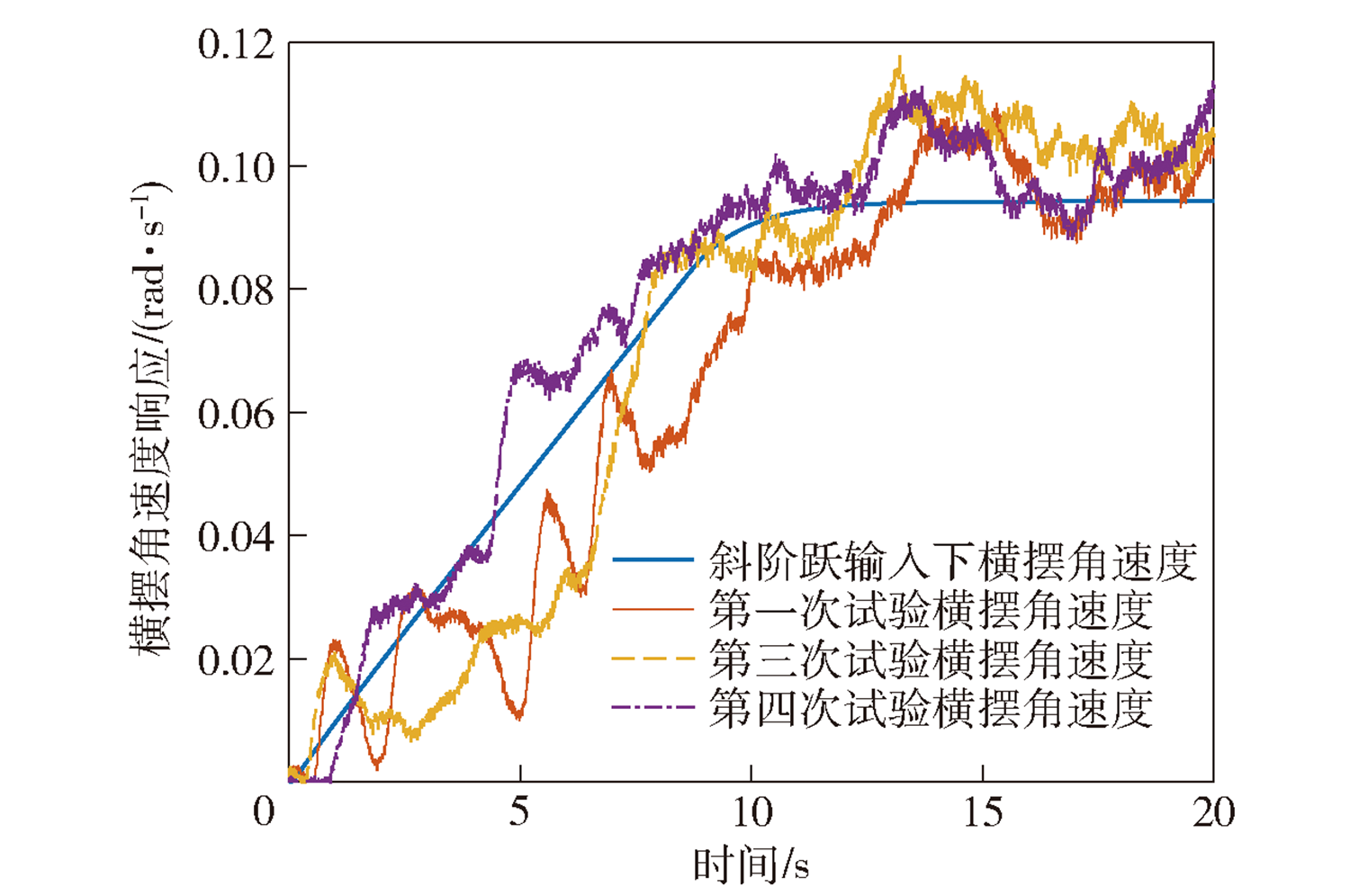
Fig.10 Comparison between yaw rate test data and the yaw rate ramp step response
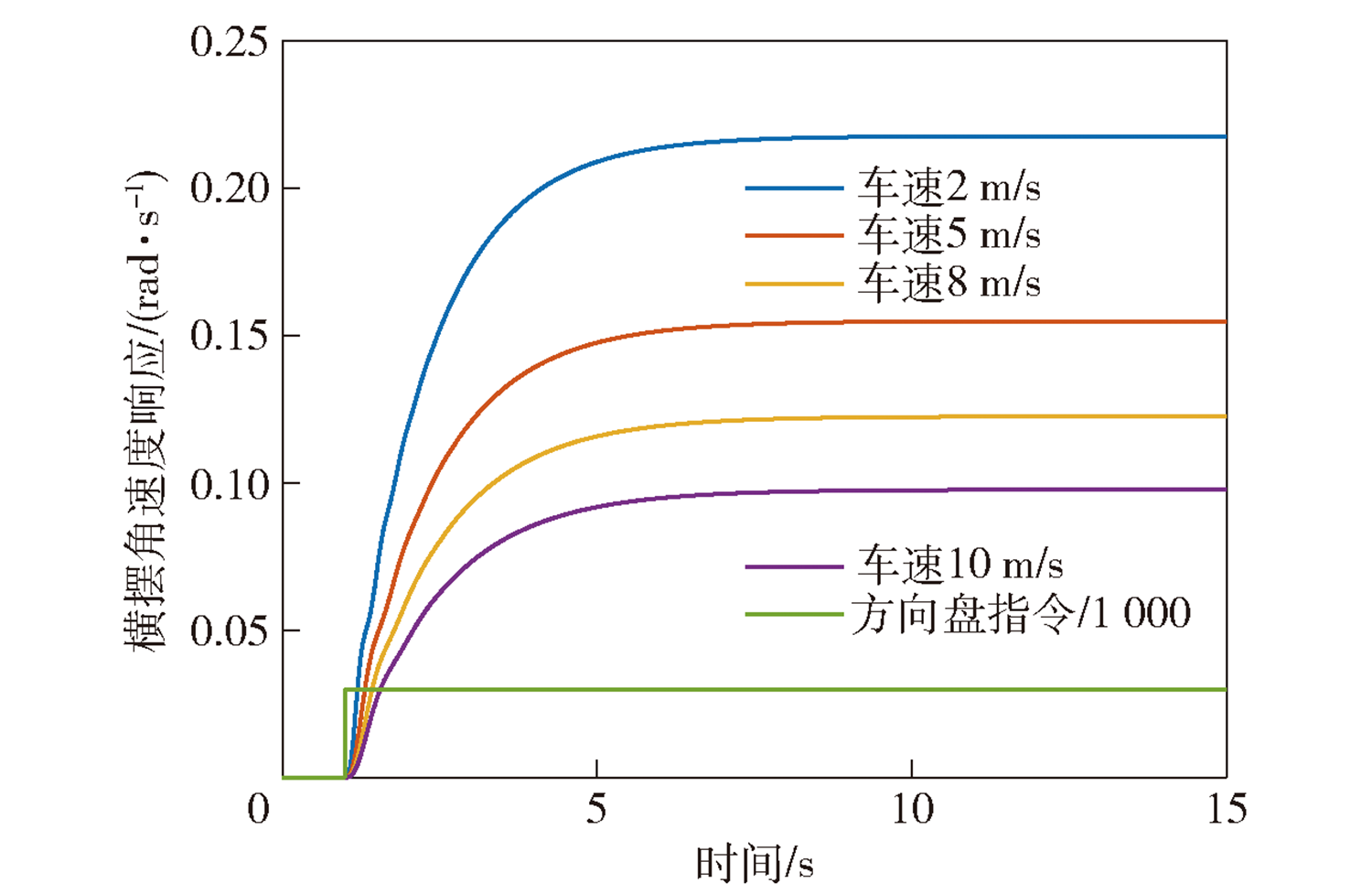
Fig.11 Step response of the electric vehicle yaw rate with different speeds
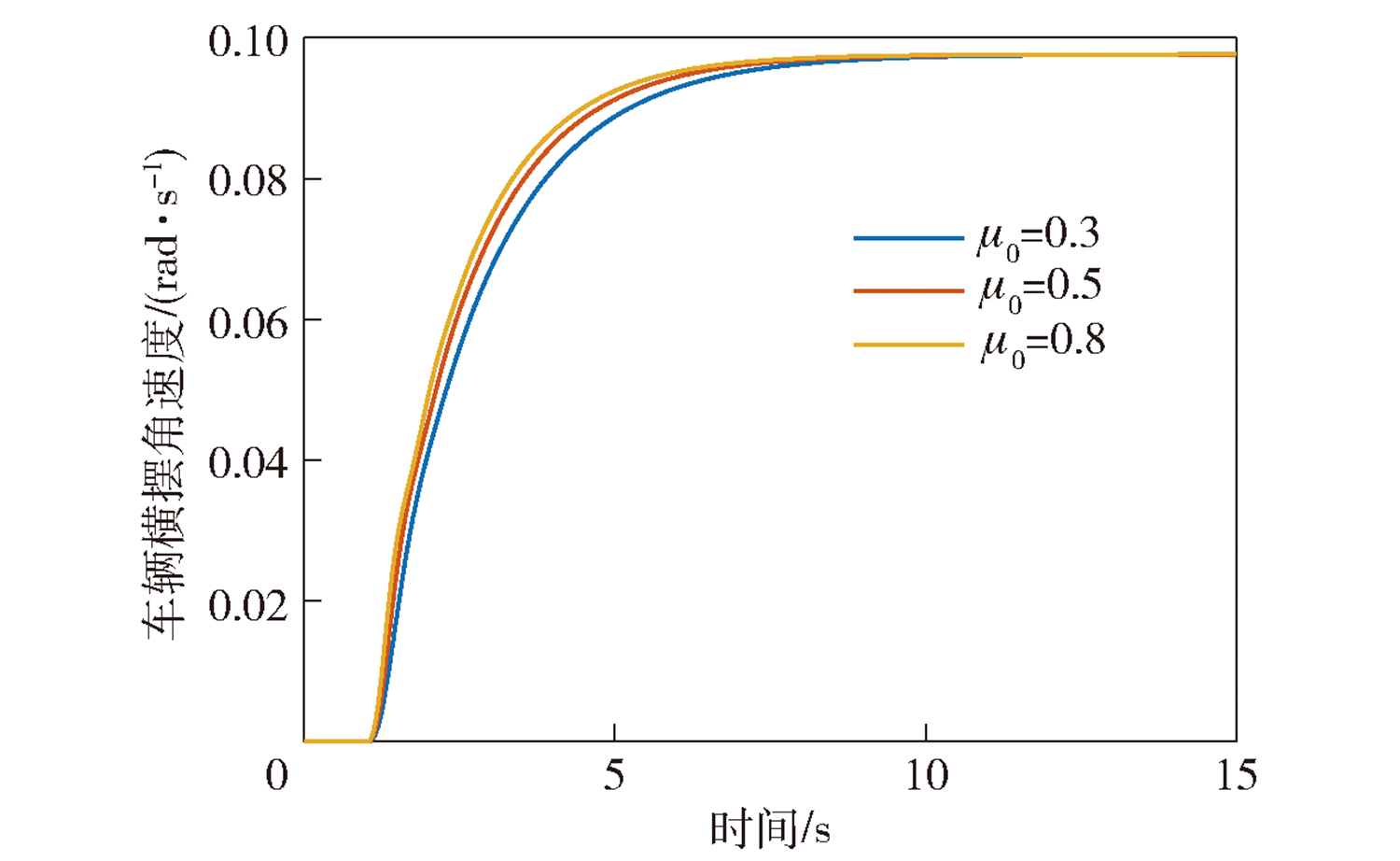
Fig.12 Step response of the vehicle yaw rate with different ground parameters
Fig.13 Vehicle track
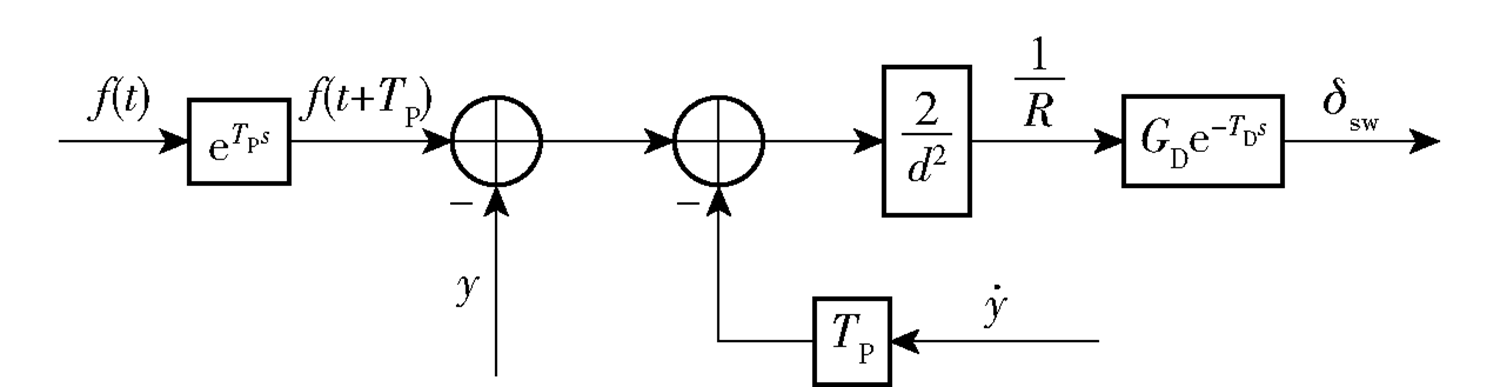
Fig.14 Block diagram of the driver control links
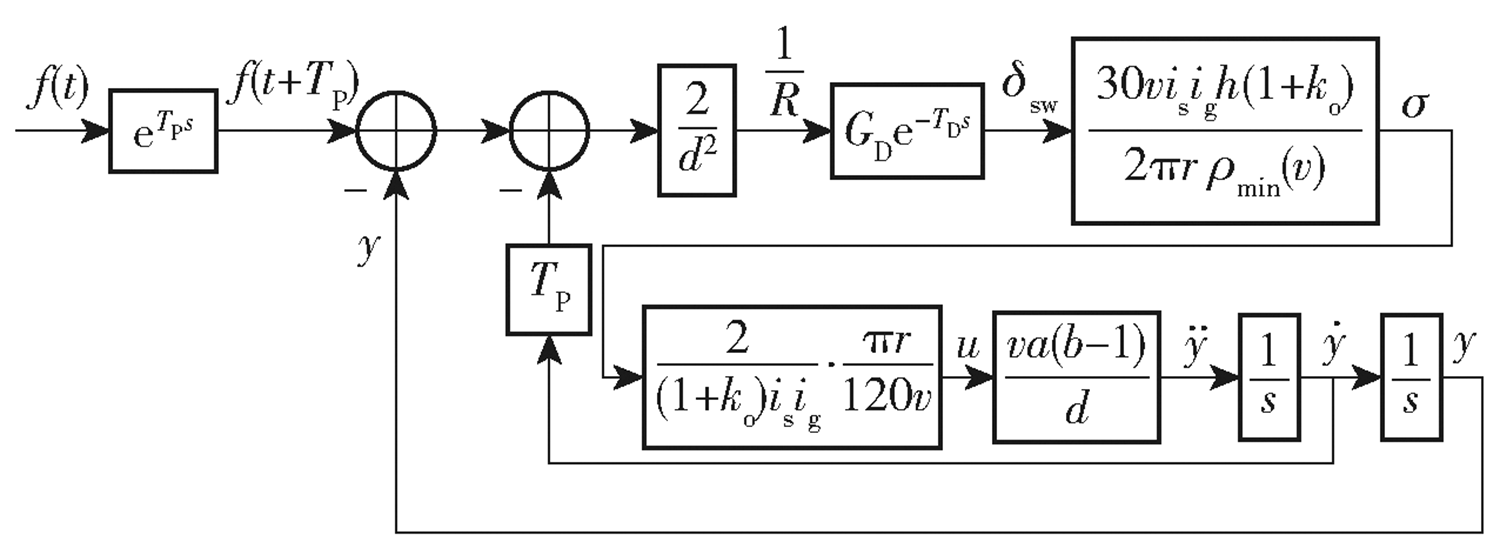
Fig.15 Block diagram of the quasi-steady closed-loop system
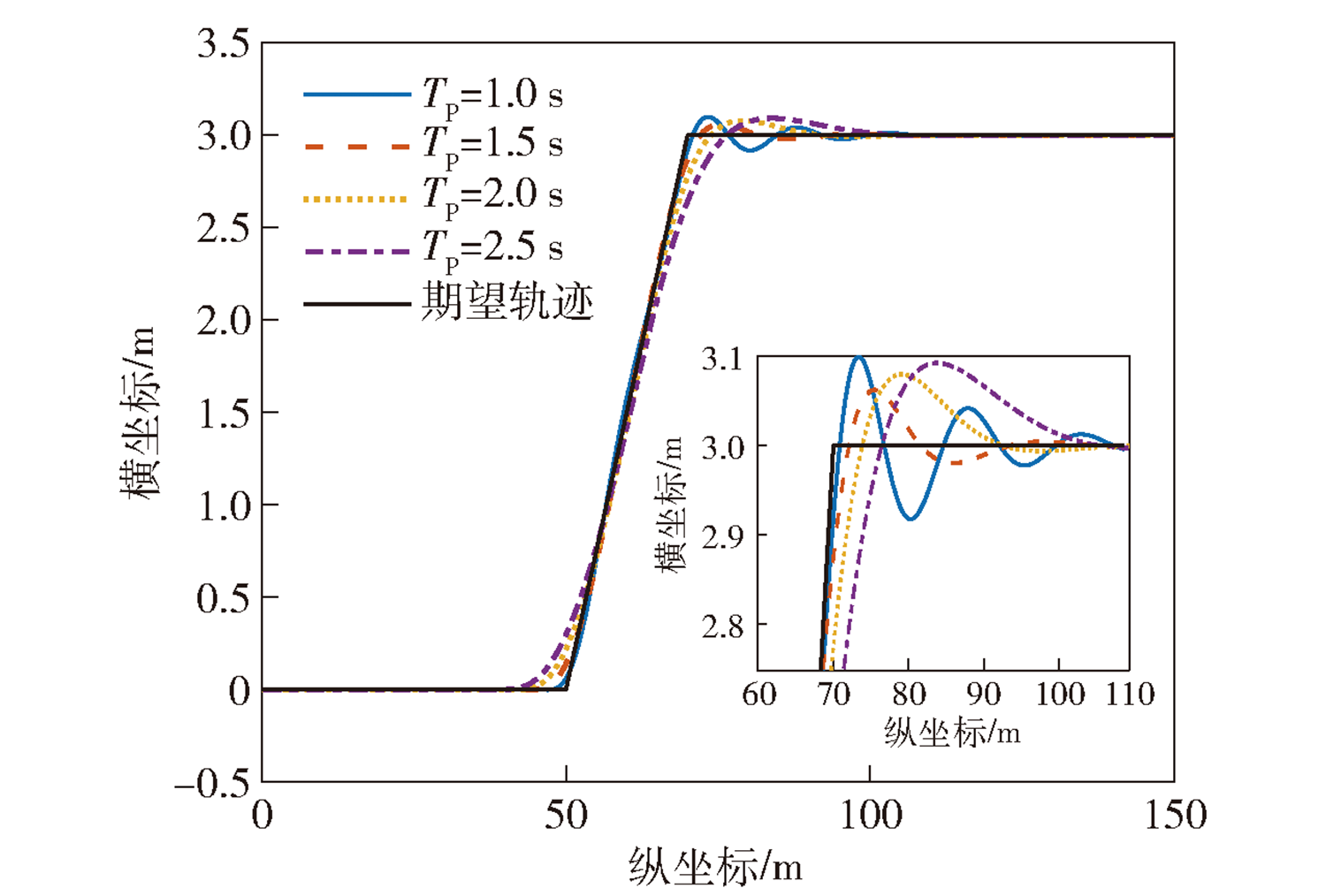
Fig.16 Response of the closed-loop system under single lane change condition with different preview times
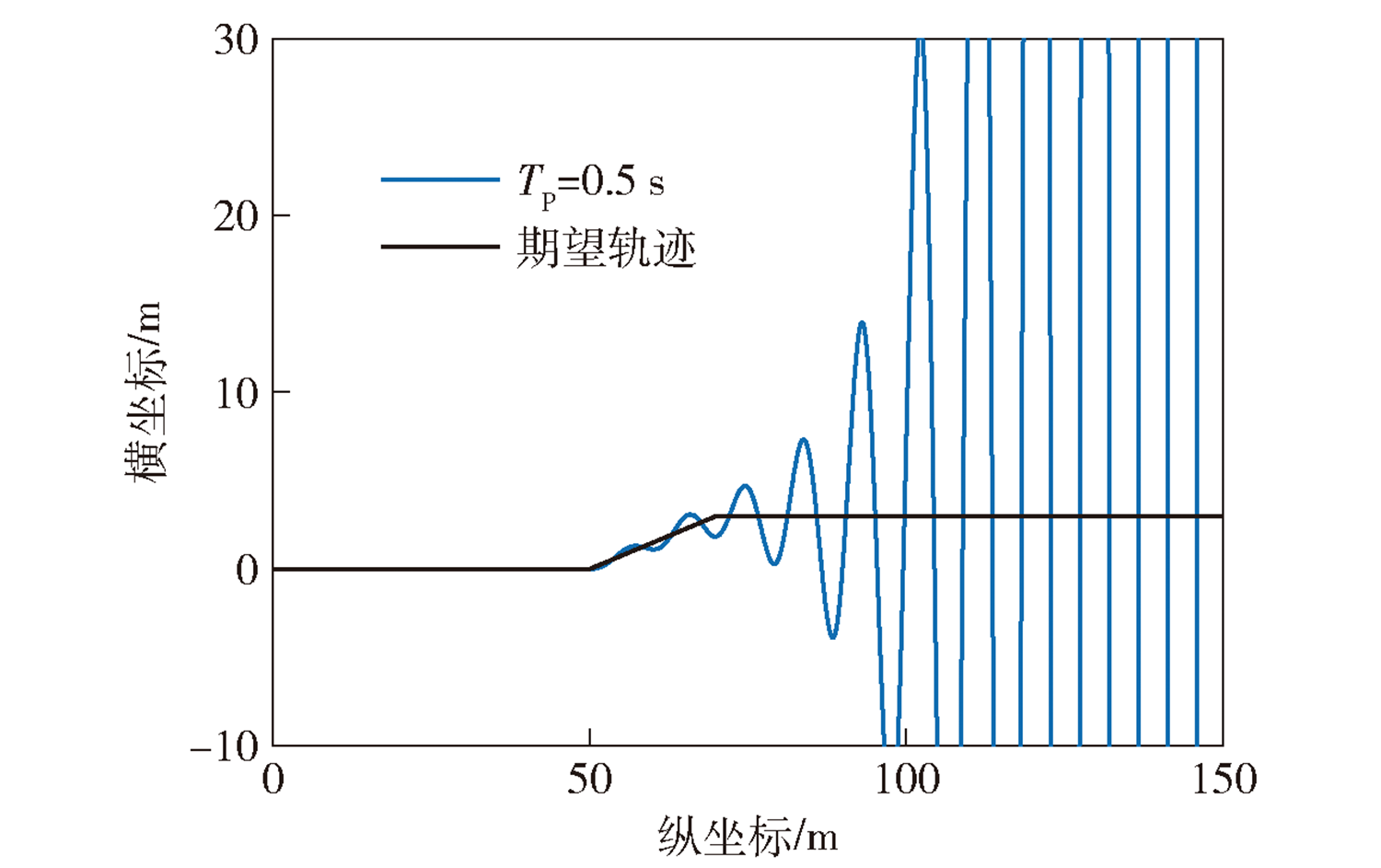
Fig.17 Response of the closed-loop system under single line lane change condition with TP=0.5s
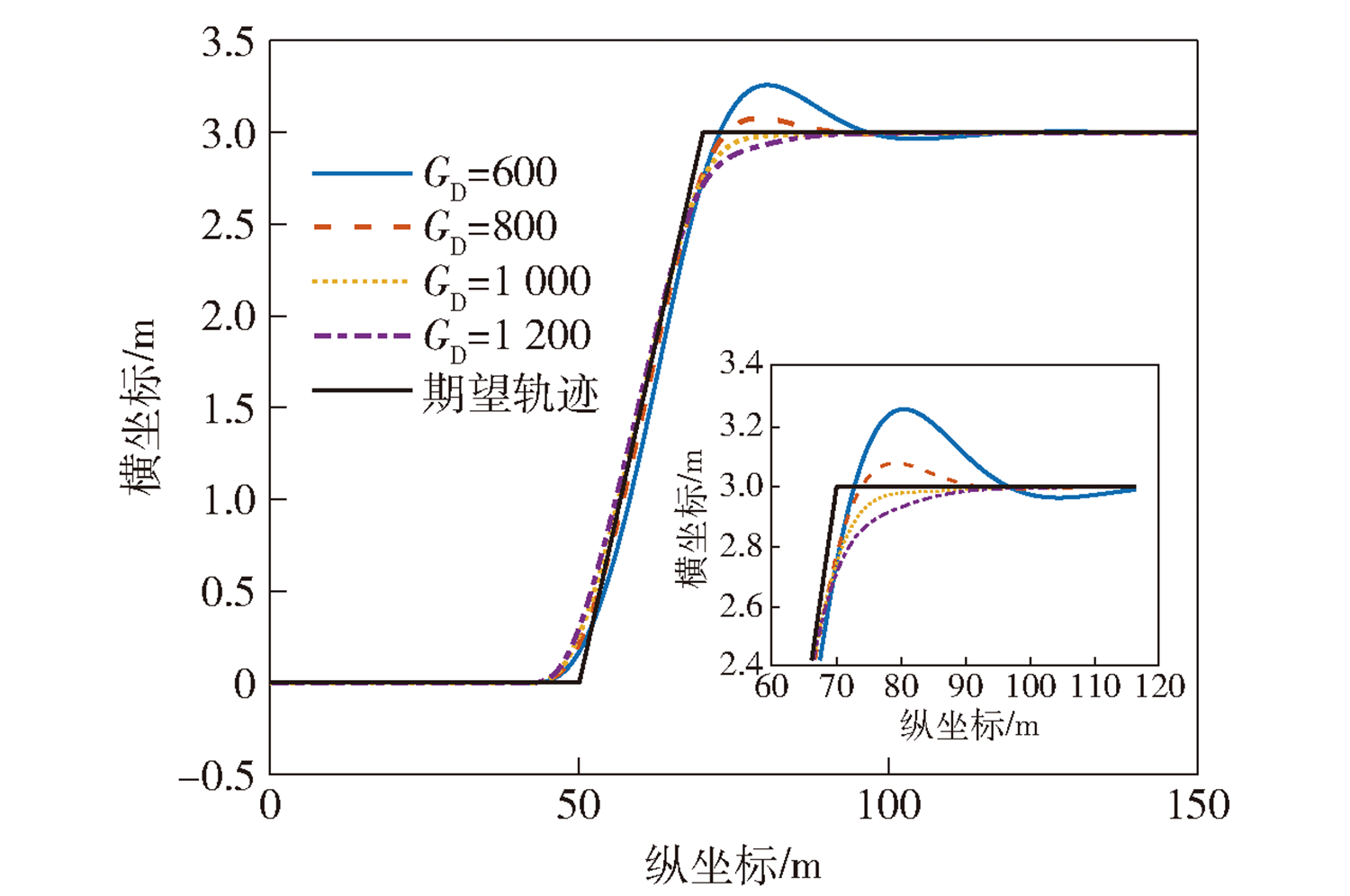
Fig.18 Response of the closed-loop system under single lane change condition with different driving gains
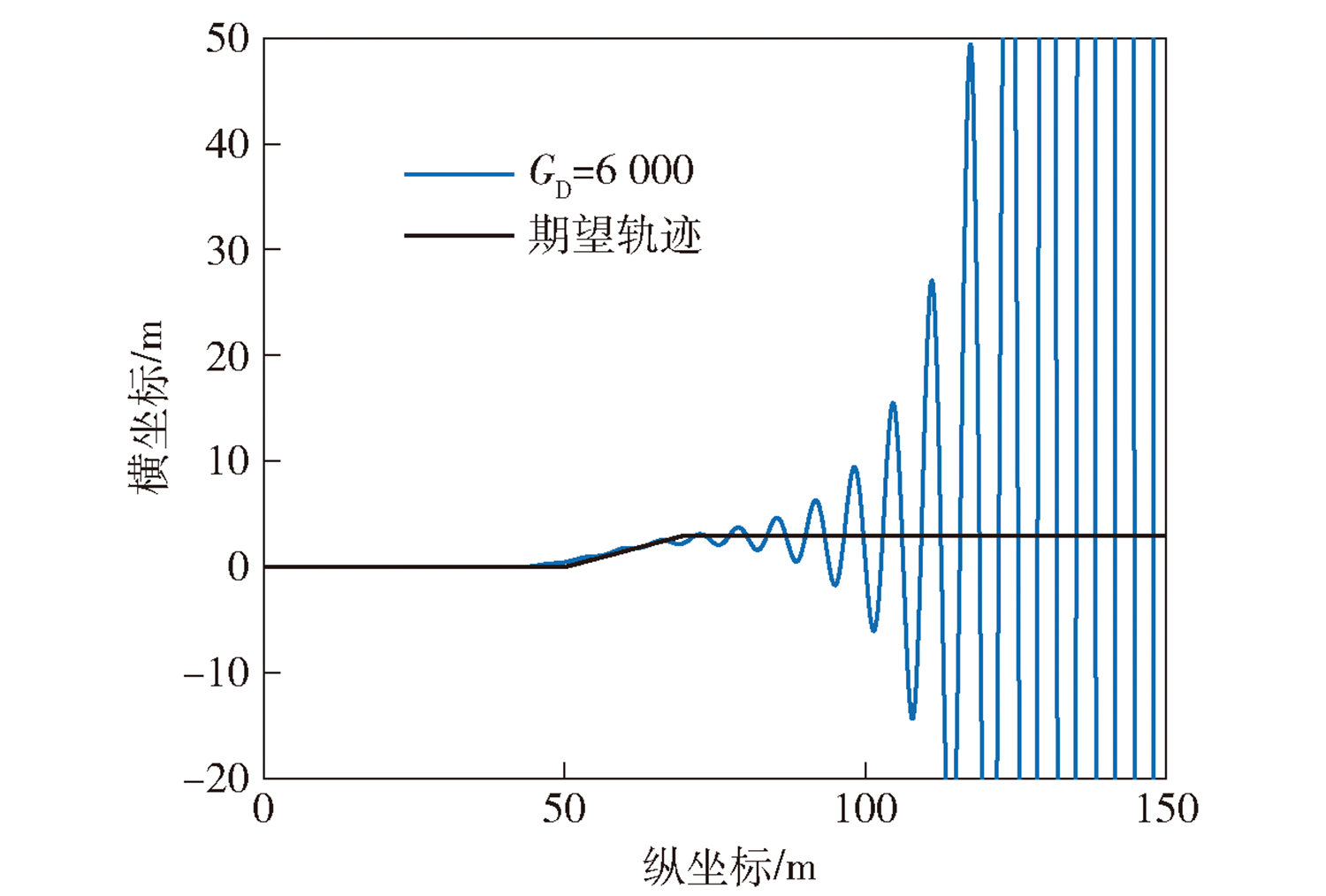
Fig.19 Response of the closed-loop system under single lane change condition with GD=6000
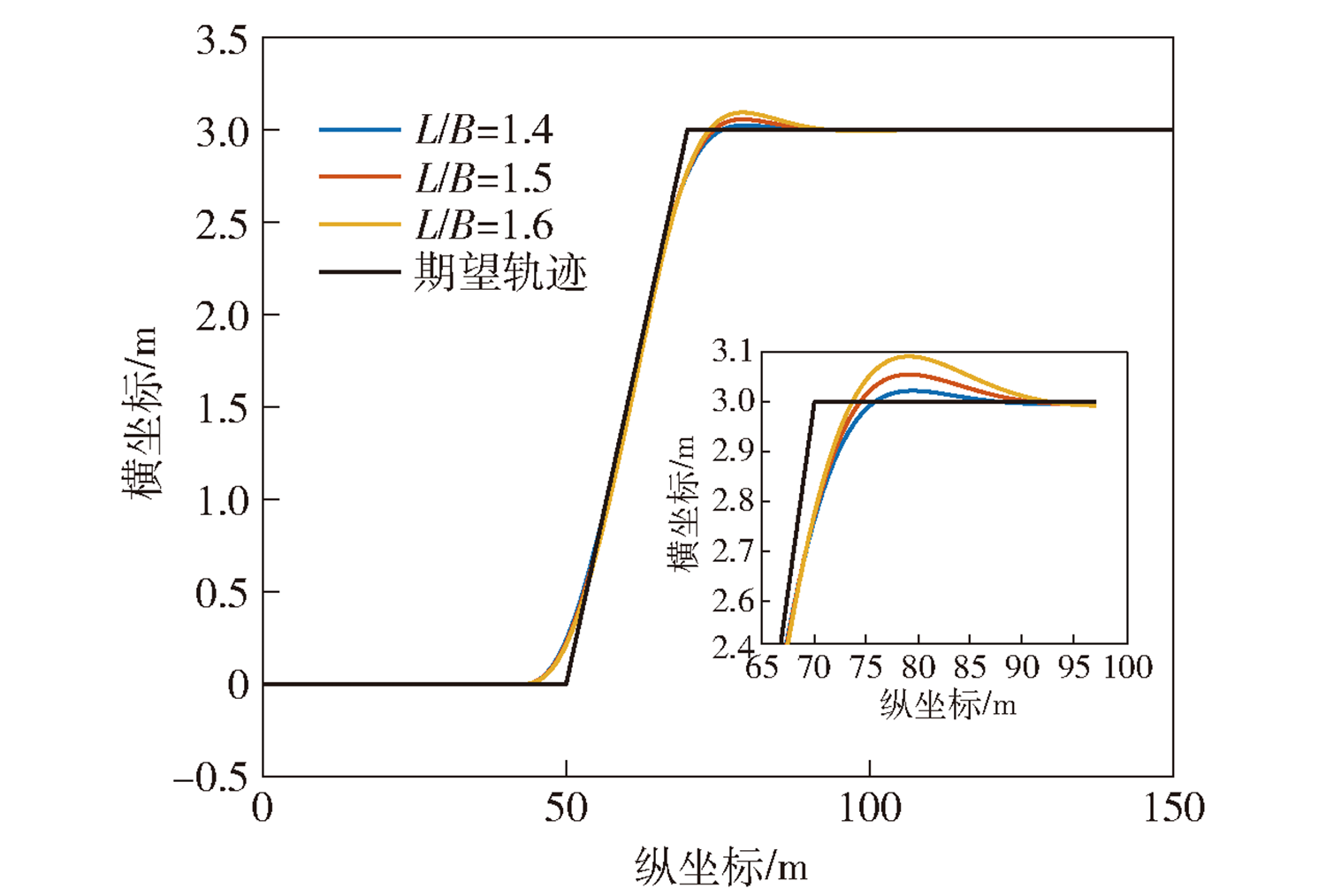
Fig.20 Response of the closed-loop system under single lane change condition with different vehicle parameters
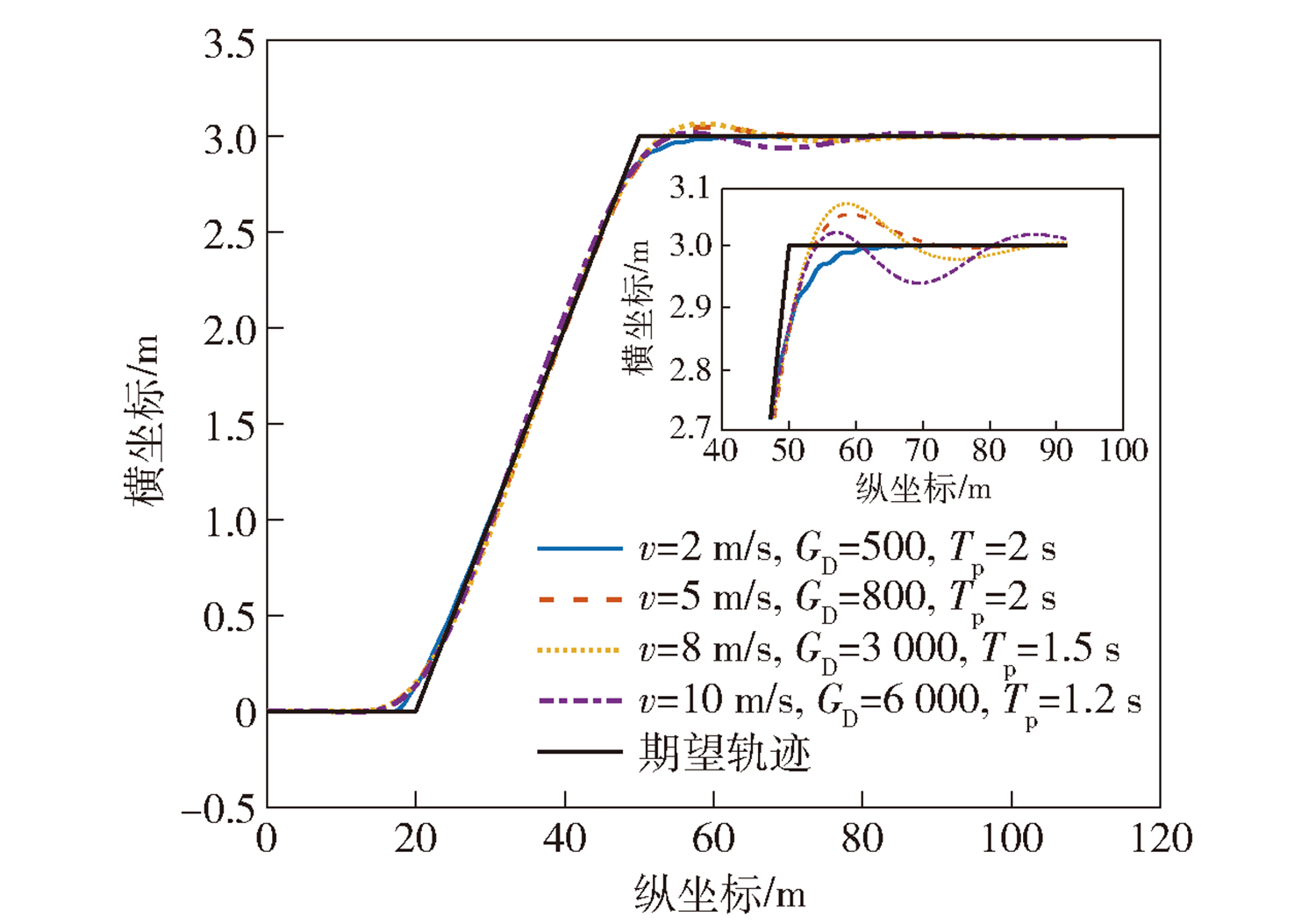
Fig.21 Response of the closed-loop system under single lane change condition with different vehicle speeds
Fig.22 Block diagram of the driver-vehicle-road dynamic closed-loop system
Fig.23 Vehicle track under single lane change condition with different preview times
Fig.24 Vehicle lateral acceleration under single lane change condition with different preview times
Fig.25 Vehicle track under single lane change condition with different driver reaction delay times
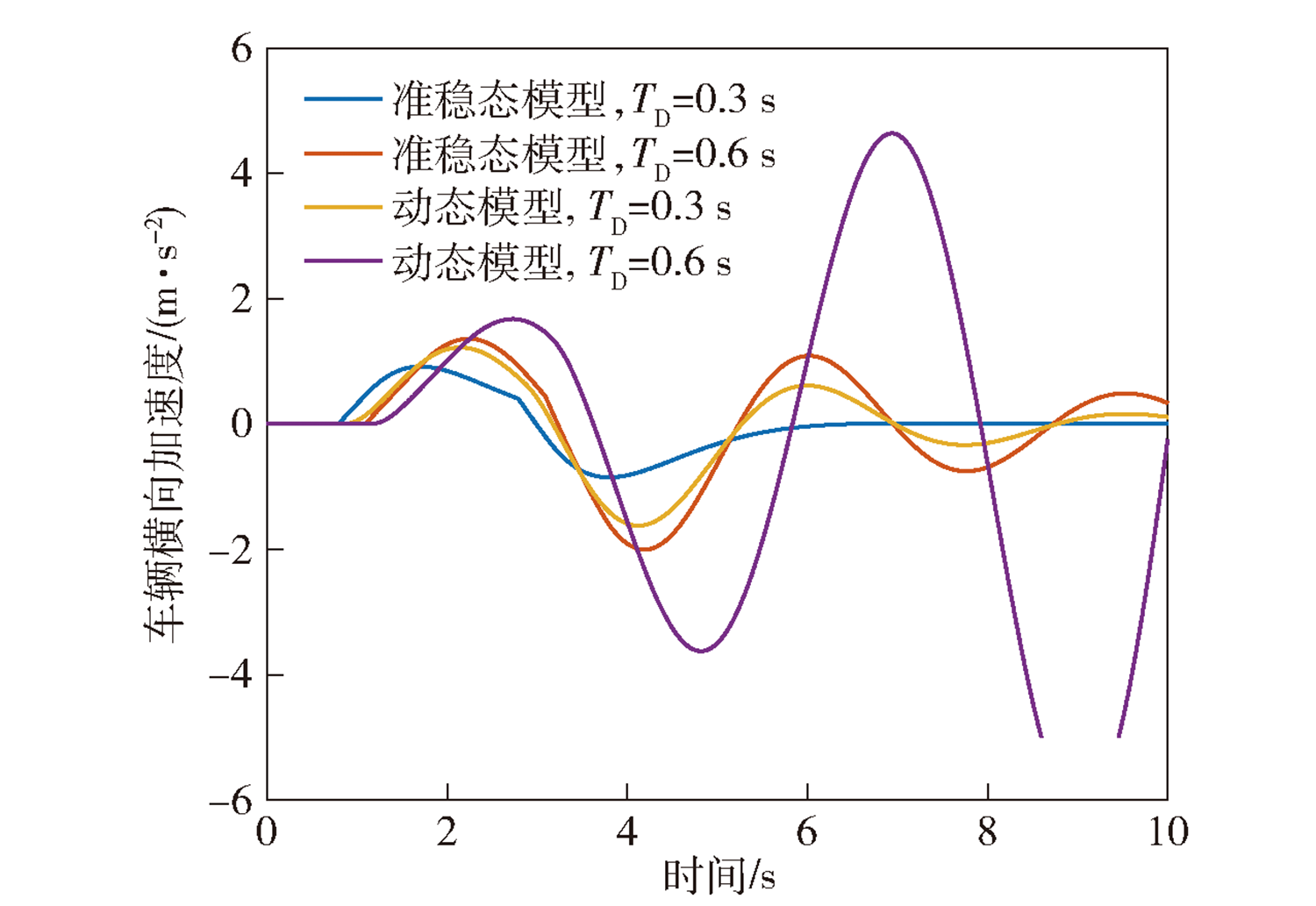
Fig.26 Vehicle lateral acceleration under single lane change condition with different driver reaction delay times
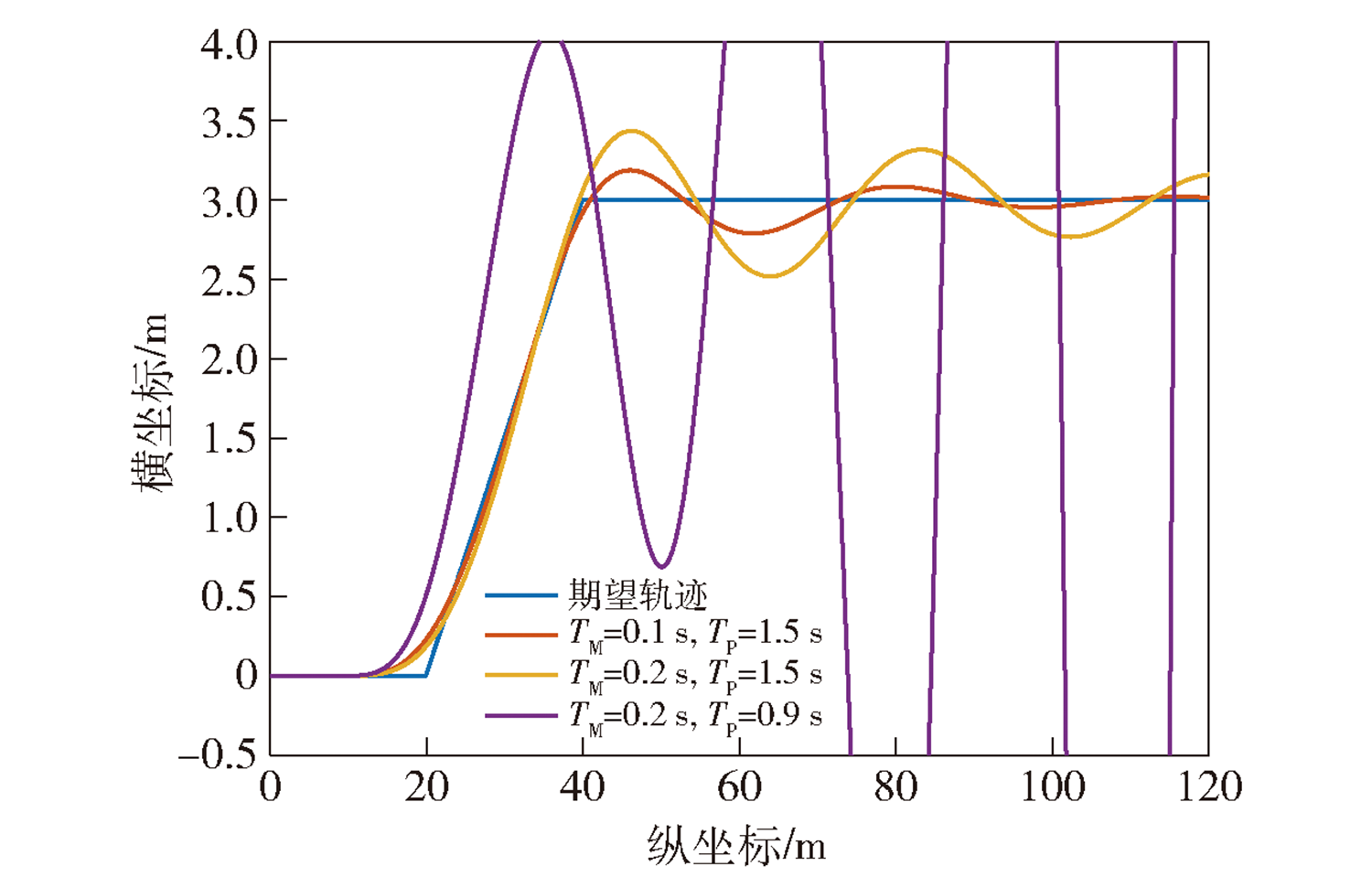
Fig.27 Vehicle track under single lane change condition with different motor response times
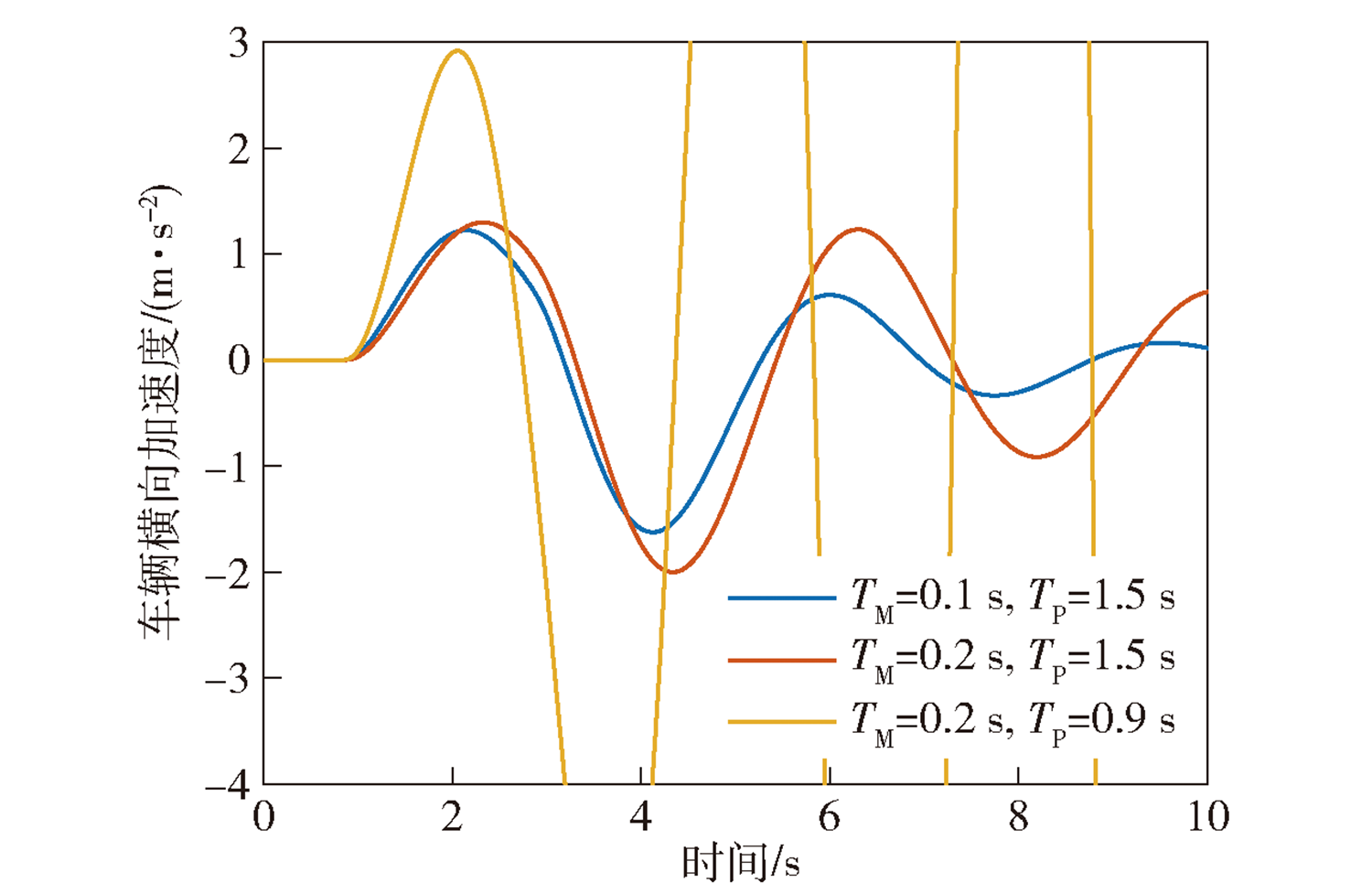
Fig.28 Vehicle lateral acceleration under single lane change condition with different motor response times
| [1] |
余志生. 汽车理论[M]. 北京: 机械工业出版社, 2006.
|
|
|
|
| [2] |
倪佑民. 汽车方向稳定性基本原理[M]. 北京: 清华大学出版社,1978.
|
|
|
|
| [3] |
陆正煜, 伦景光, 倪佑民. 方向盘斜阶跃转角输入对汽车转向瞬态响应特性的影响[J]. 汽车工程, 1982,(1):35-41.
|
|
|
|
| [4] |
陆正煜, 伦景光, 倪佑民. 汽车转向特性模拟计算的初步研究[J]. 汽车工程, 1982(2):39-53.
|
|
|
|
| [5] |
郭孔辉. 人-车-路闭环操纵系统主动安全性的综合评价与优化设计[J]. 汽车技术, 1993(4):4-12.
|
|
|
|
| [6] |
郭孔辉. 驾驶员-汽车闭环操纵运动的最优预瞄曲率模型[J]. 汽车工程, 1984(3):1-15.
|
|
|
|
| [7] |
李亮, 朱宏军, 陈杰, 等. 用于汽车稳定性控制的路面附着识别算法[J]. 机械工程学报, 2014, 50(2):132-138.
|
|
|
|
| [8] |
王伟达, 张宇航, 黄国强, 等. 轮毂驱动电动车辆动力学稳定性滑模控制策略研究[J]. 动力学与控制学报, 2021, 19(3):5-14.
|
|
|
|
| [9] |
|
| [10] |
闫清东, 张连第, 赵毓芹, 等. 坦克构造与设计[M]. 北京: 北京理工大学出版社, 2007.
|
|
|
|
| [11] |
盖江涛, 黄守道, 周广明, 等. 双电机耦合驱动履带车辆自适应滑模转向控制[J]. 兵工学报, 2015, 36(3):405-411.
doi: 10.3969/j.issn.1000-1093.2015.03.004 |
|
|
|
| [12] |
邹渊, 孙逢春, 张承宁. 电传动履带车辆双侧驱动转速调节控制策略[J]. 北京理工大学学报, 2007, 27(4):303-307.
|
|
|
|
| [13] |
曾庆含, 马晓军, 廖自力, 等. 双侧电驱动履带车辆等效条件积分滑模稳定转向控制[J]. 兵工学报, 2016, 37(8):1351-1358.
doi: 10.3969/j.issn.1000-1093.2016.08.002 |
|
|
|
| [14] |
盖江涛, 刘春生, 马长军, 等. 考虑履带滑转滑移的电驱动车辆转向控制策略研究[J]. 兵工学报, 2021, 42(10):2092-2101.
doi: 10.3969/j.issn.1000-1093.2021.10.005 |
|
|
|
| [15] |
王红岩, 王钦龙, 芮强, 等. 高速履带车辆转向过程分析与试验验证[J]. 机械工程学报, 2014, 50(16):162-172.
|
|
|
|
| [16] |
芮强, 王红岩, 王钦龙, 等. 履带车辆转向性能参数分析与试验研究[J]. 机械工程学报, 2015, 51(12):128-136.
|
|
|
|
| [17] |
doi: 10.1016/0022-4898(77)90035-0 URL |
| [18] |
|
| [19] |
董景新, 赵长德, 熊沈蜀, 等. 控制工程基础[M]. 北京: 清华大学出版社, 2003.
|
|
|
|
| [20] |
盖江涛, 李慎龙, 周广明, 等. 一种履带车辆机电复合传动装置: CN101985279A[P]. 2011-11-02.
|
|
|
|
| [21] |
盖江涛, 黄守道, 周广明, 等. 双侧电机驱动的功率耦合机构传动方案设计方法[J]. 中国机械工程, 2014, 25(1):1739-1743.
|
|
|
| [1] | LI Huanhuan, LIU Hui, GAI Jiangtao, LI Xunming. Steering Control of Dual-motor Coupling Drive Tracked Vehicle Based on PSO PID Parameter Optimization [J]. Acta Armamentarii, 2024, 45(3): 916-924. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||