
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (1): 260-269.doi: 10.12382/bgxb.2022.0795
Special Issue: 特种车辆理论与技术
Previous Articles Next Articles
LI Feiran, ZHANG Yutian, WEI Chao, HU Jibin, WU Wei*( )
)
Received:2022-09-08
Online:2023-02-10
Contact:
WU Wei
CLC Number:
LI Feiran, ZHANG Yutian, WEI Chao, HU Jibin, WU Wei. Reconfigurable Integrated Coordination Control for Multi-Wheel Distributed Vehicles[J]. Acta Armamentarii, 2023, 44(1): 260-269.
Add to citation manager EndNote|Ris|BibTeX
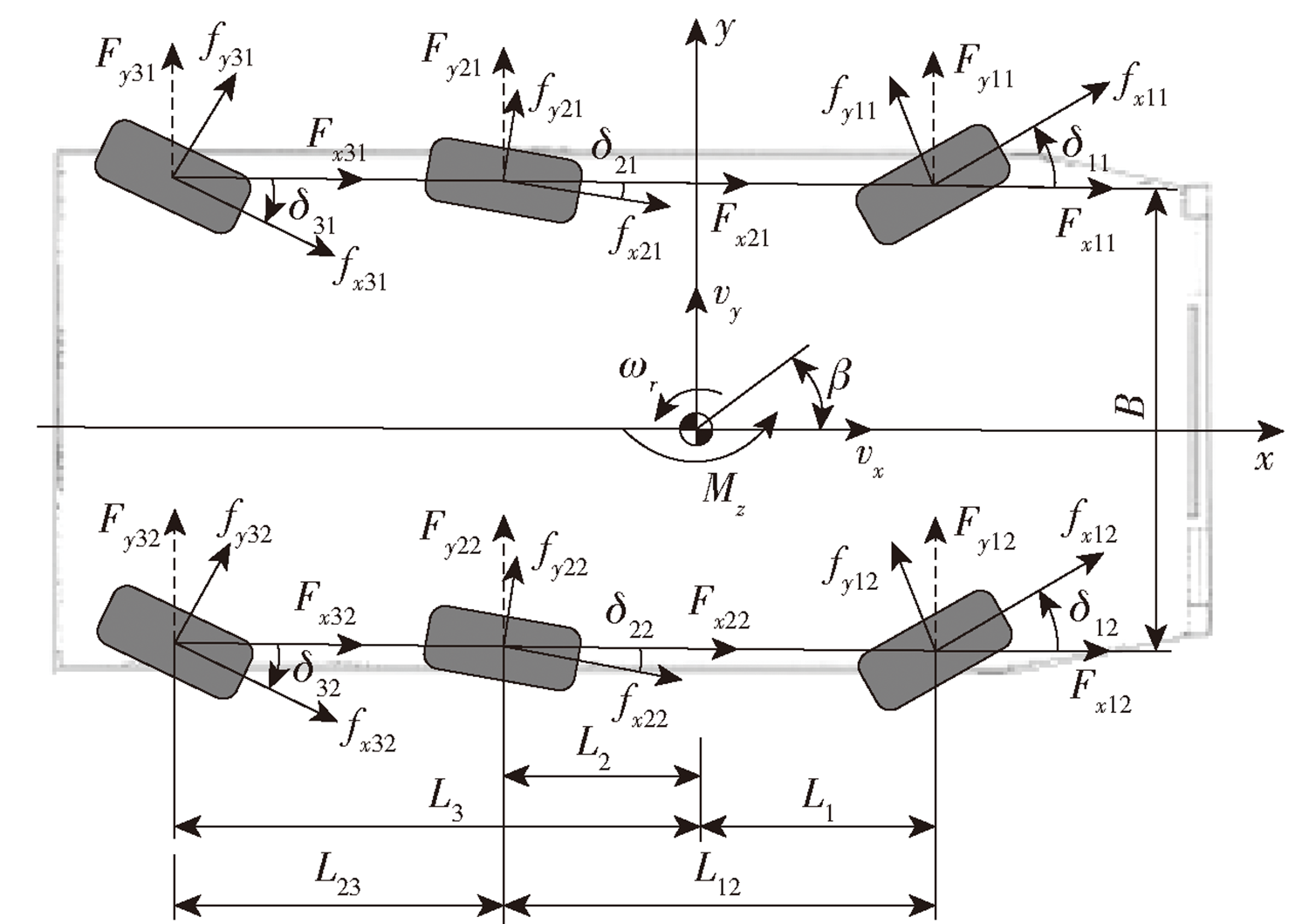
Fig.1 Dynamic model of the whole vehicle
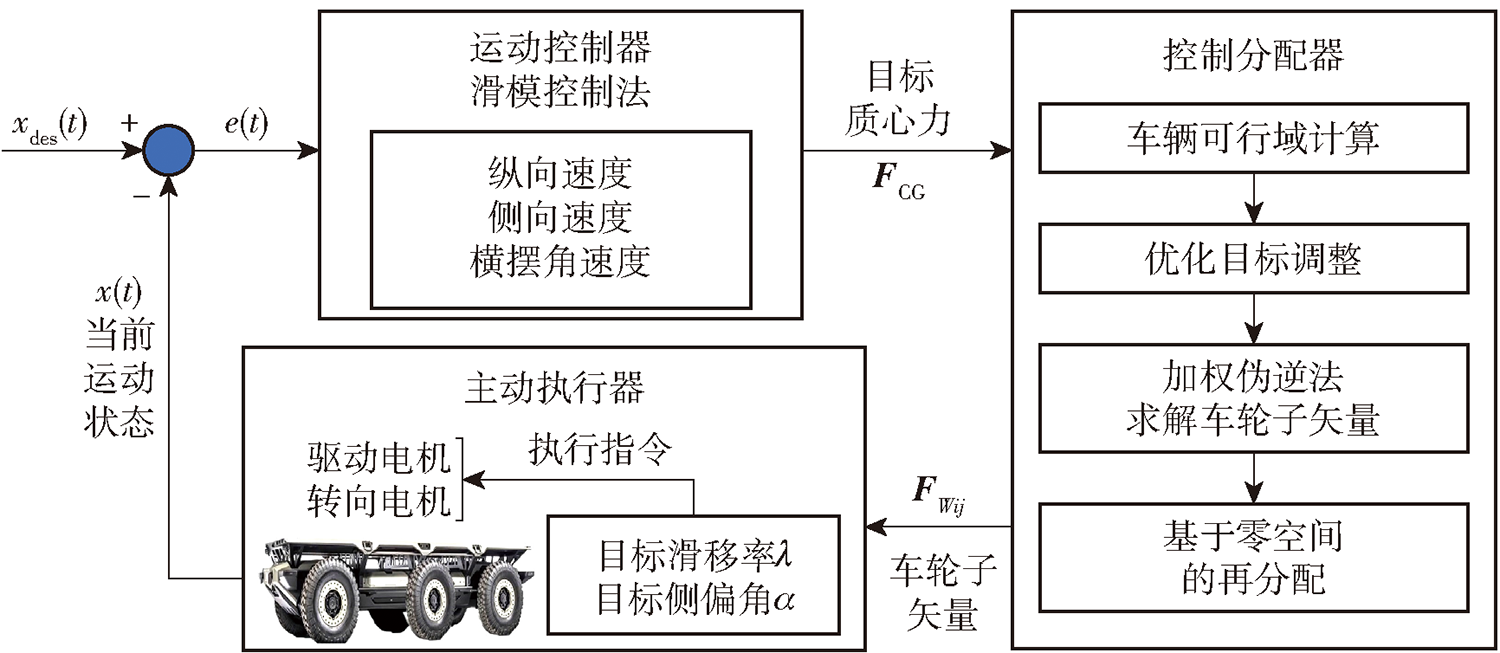
Fig.2 Flow chart of integrated coordination control
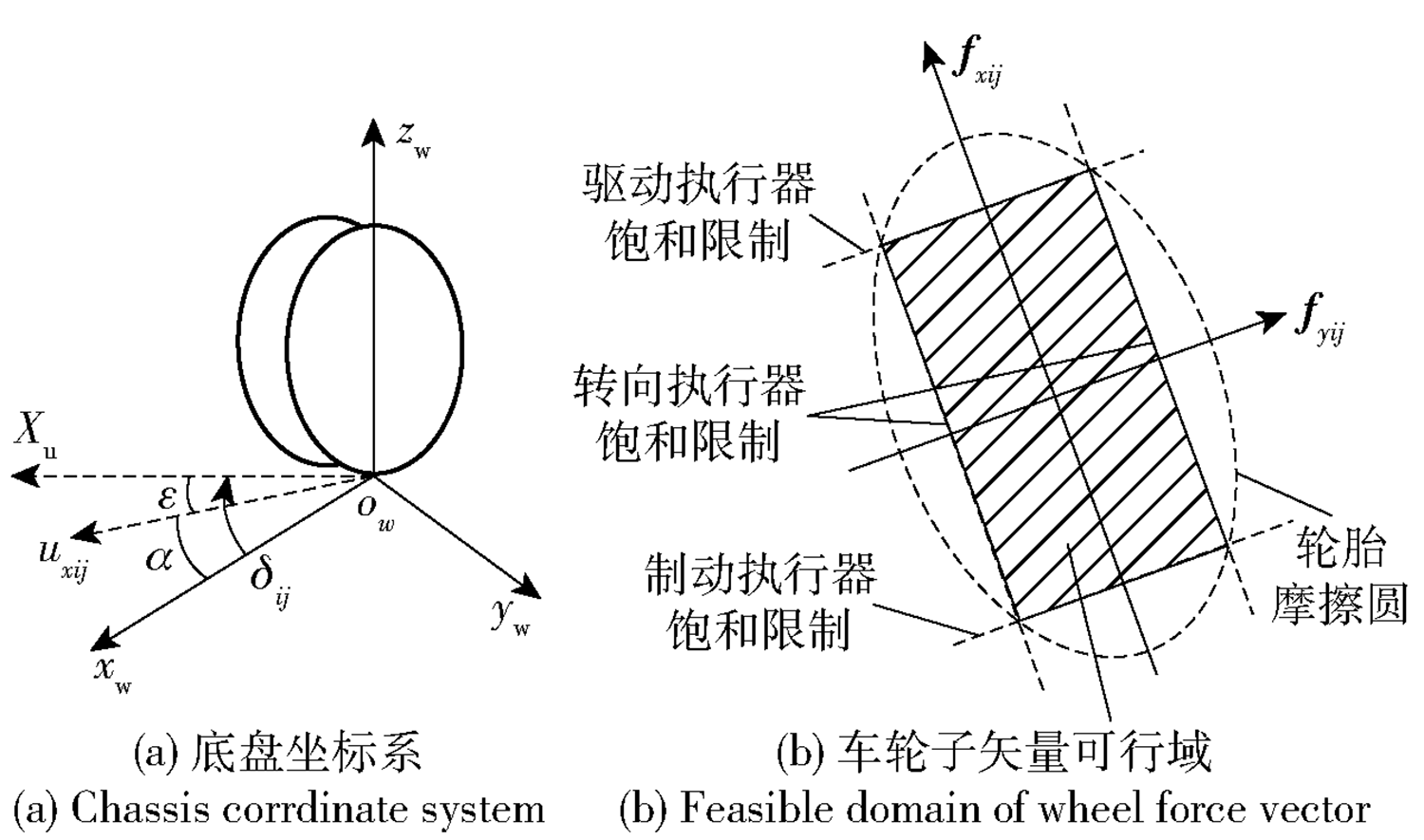
Fig.3 Feasible region of WFV
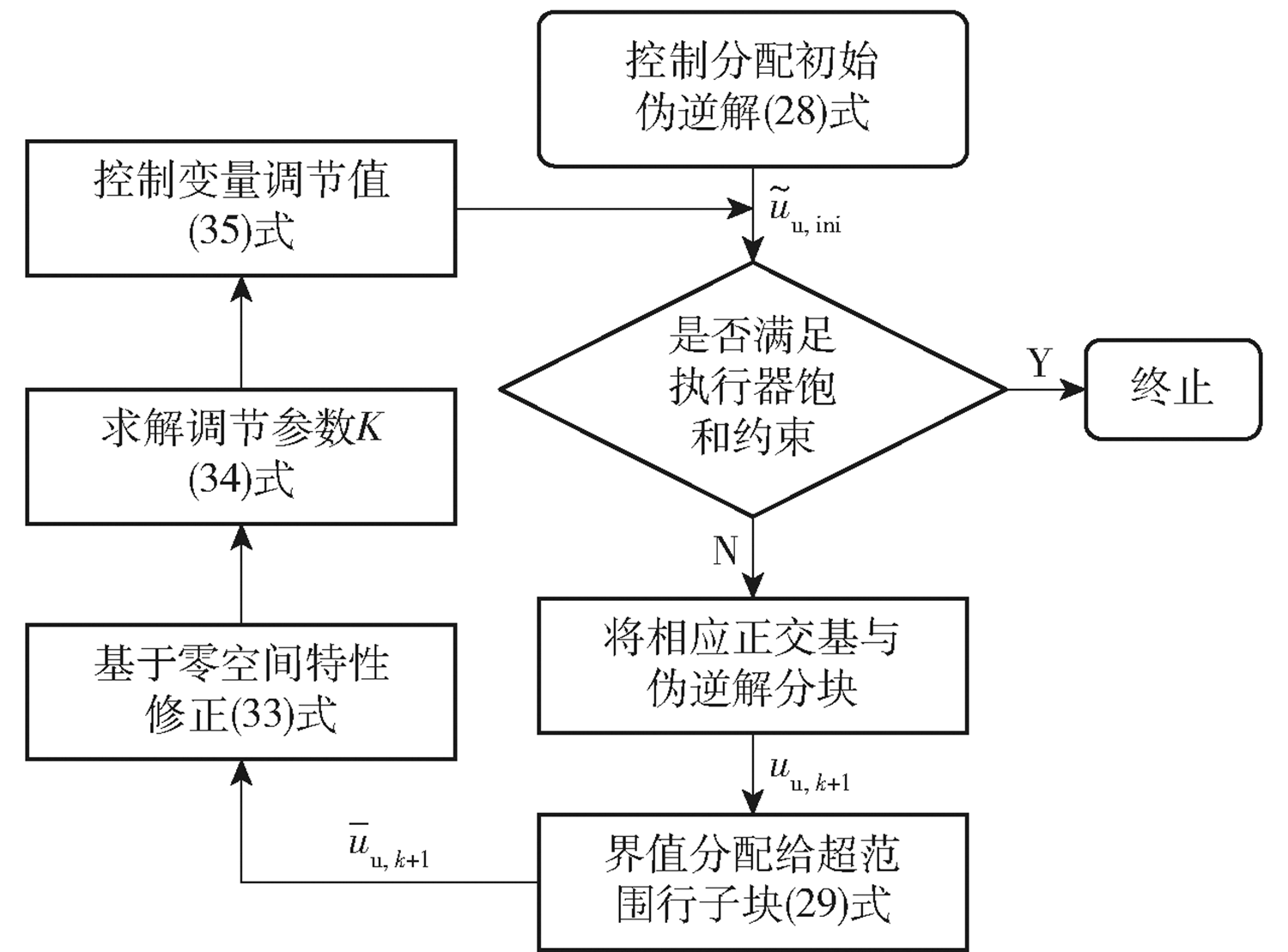
Fig.4 Schematic diagram of RWPI
| 参数 | 数值 |
|---|---|
| 整车质量/kg | 1550 |
| 轮胎半径/m | 0.229 |
| 质心到各轴间距离/m | 1.4/0.1/1.6 |
| 轮距/m | 1.8 |
| 转动惯量/(kg·m2) | 1665 |
| 车轮转动惯量/(kg·m2) | 1.3 |
| 电机最大力矩/(N·m) | 70 |
Table 1 Vehicle system parameters
| 参数 | 数值 |
|---|---|
| 整车质量/kg | 1550 |
| 轮胎半径/m | 0.229 |
| 质心到各轴间距离/m | 1.4/0.1/1.6 |
| 轮距/m | 1.8 |
| 转动惯量/(kg·m2) | 1665 |
| 车轮转动惯量/(kg·m2) | 1.3 |
| 电机最大力矩/(N·m) | 70 |
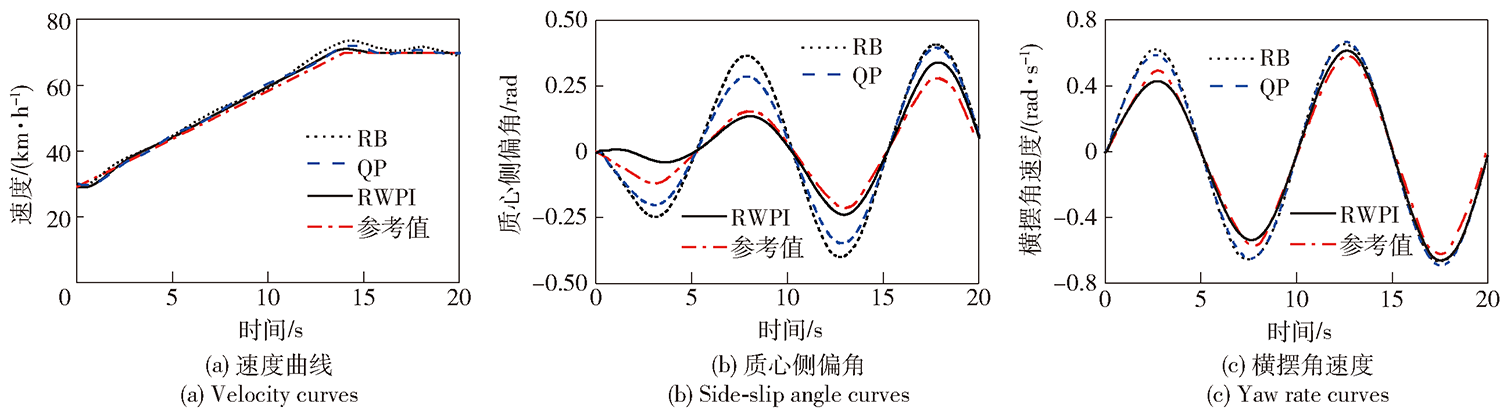
Fig.5 Results of slalom test
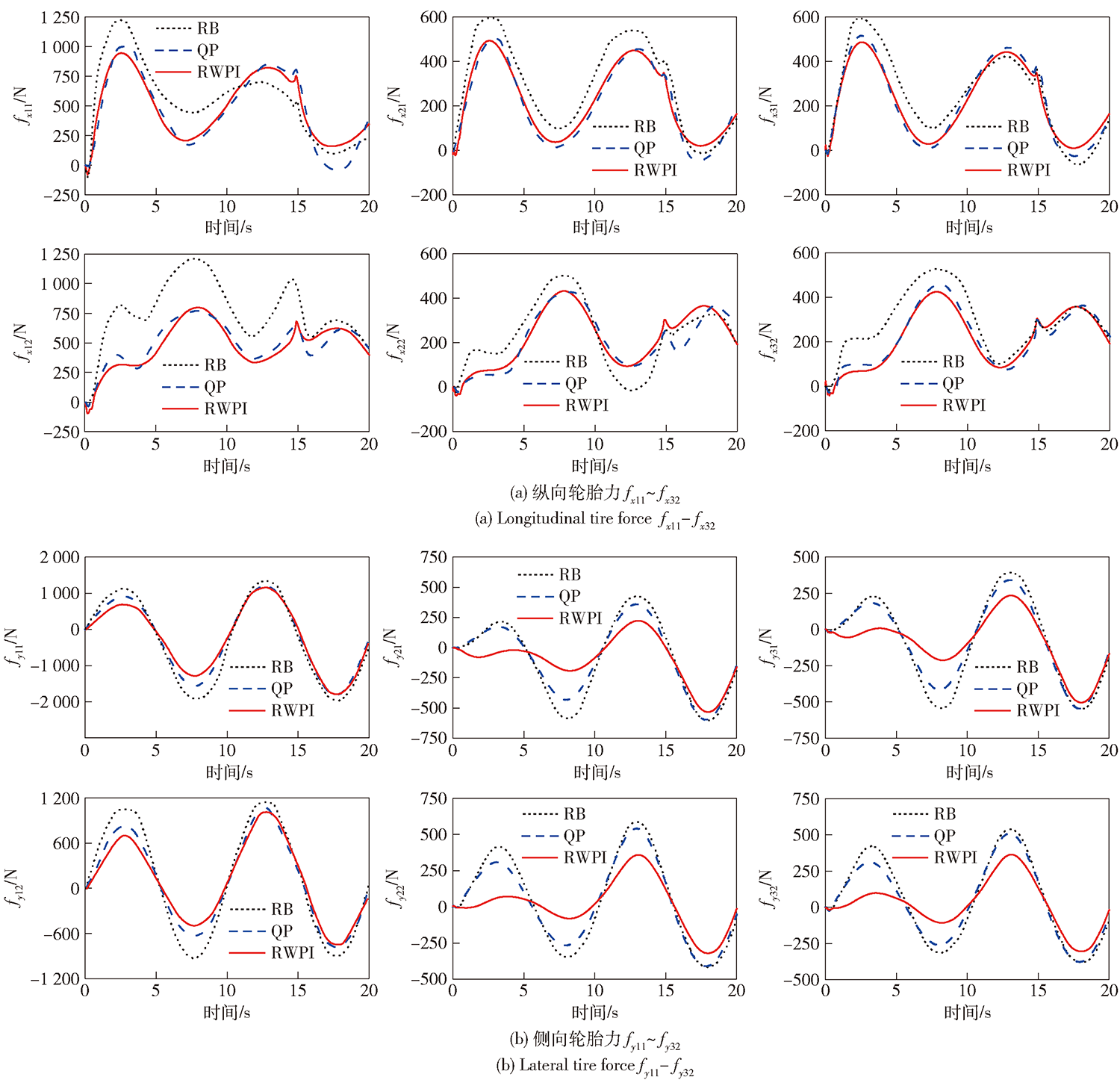
Fig.6 Tire force of slalom test
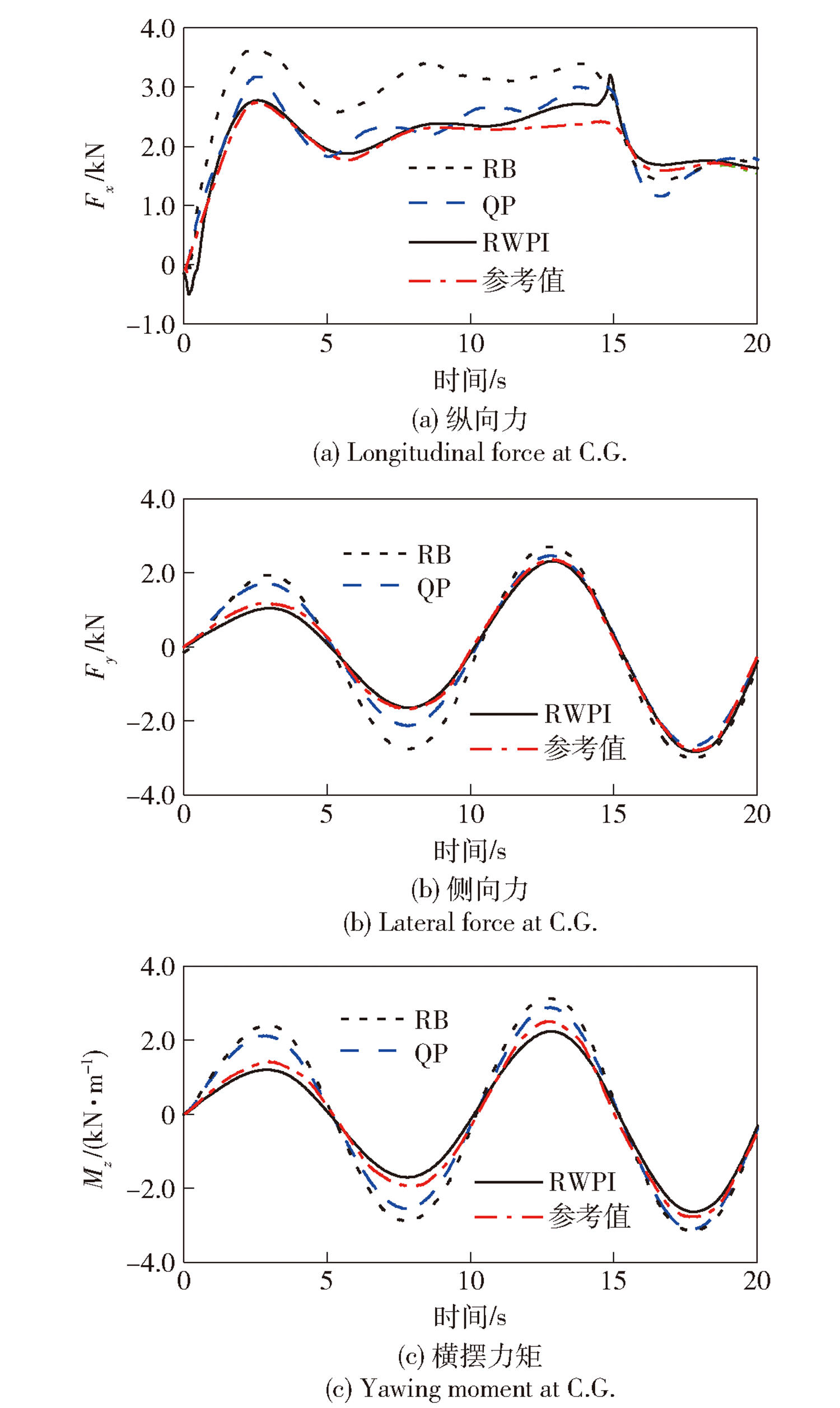
Fig.7 Results of forces at C.G.

Fig.8 Picture of prototype
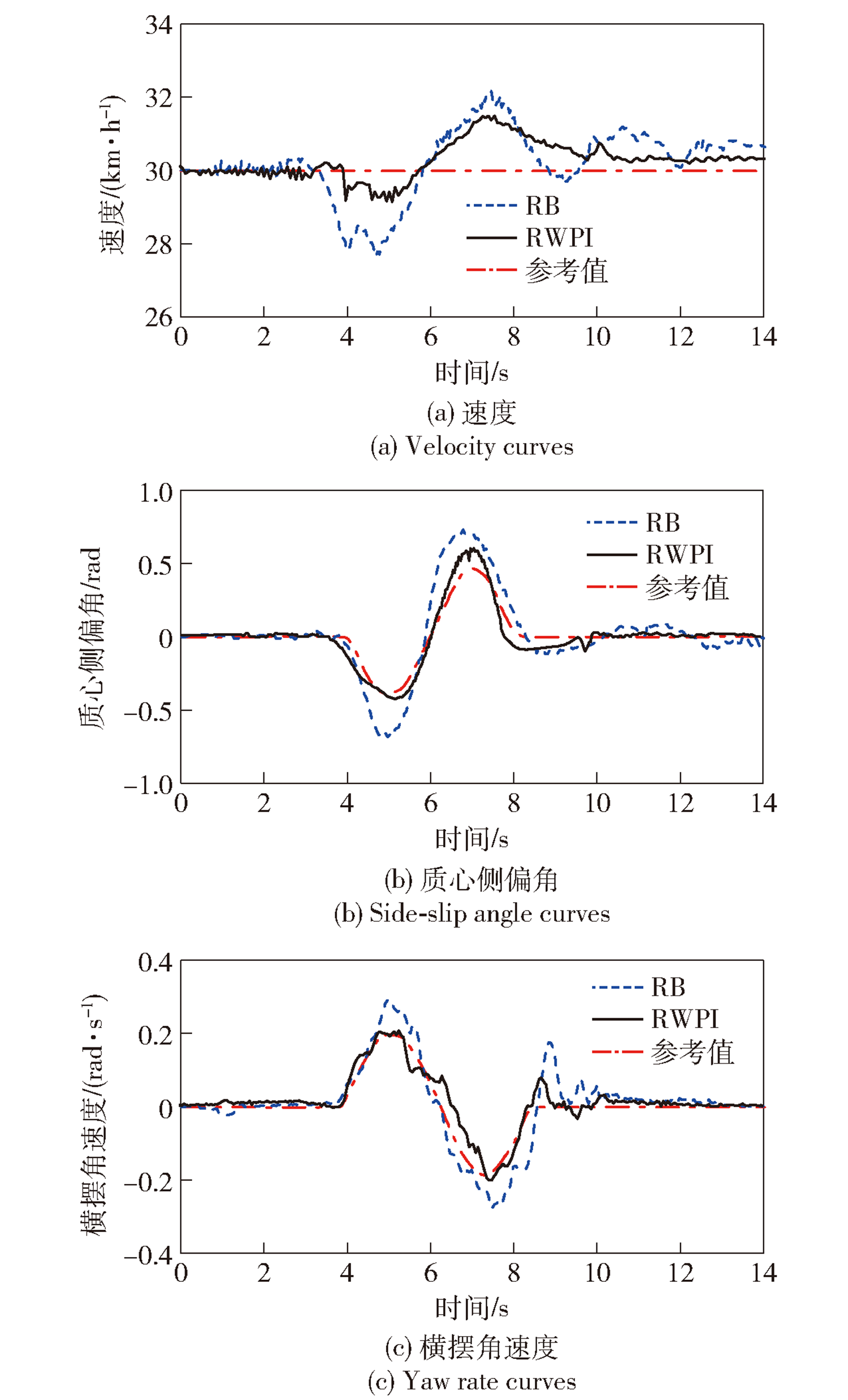
Fig.9 Results of single lane change test
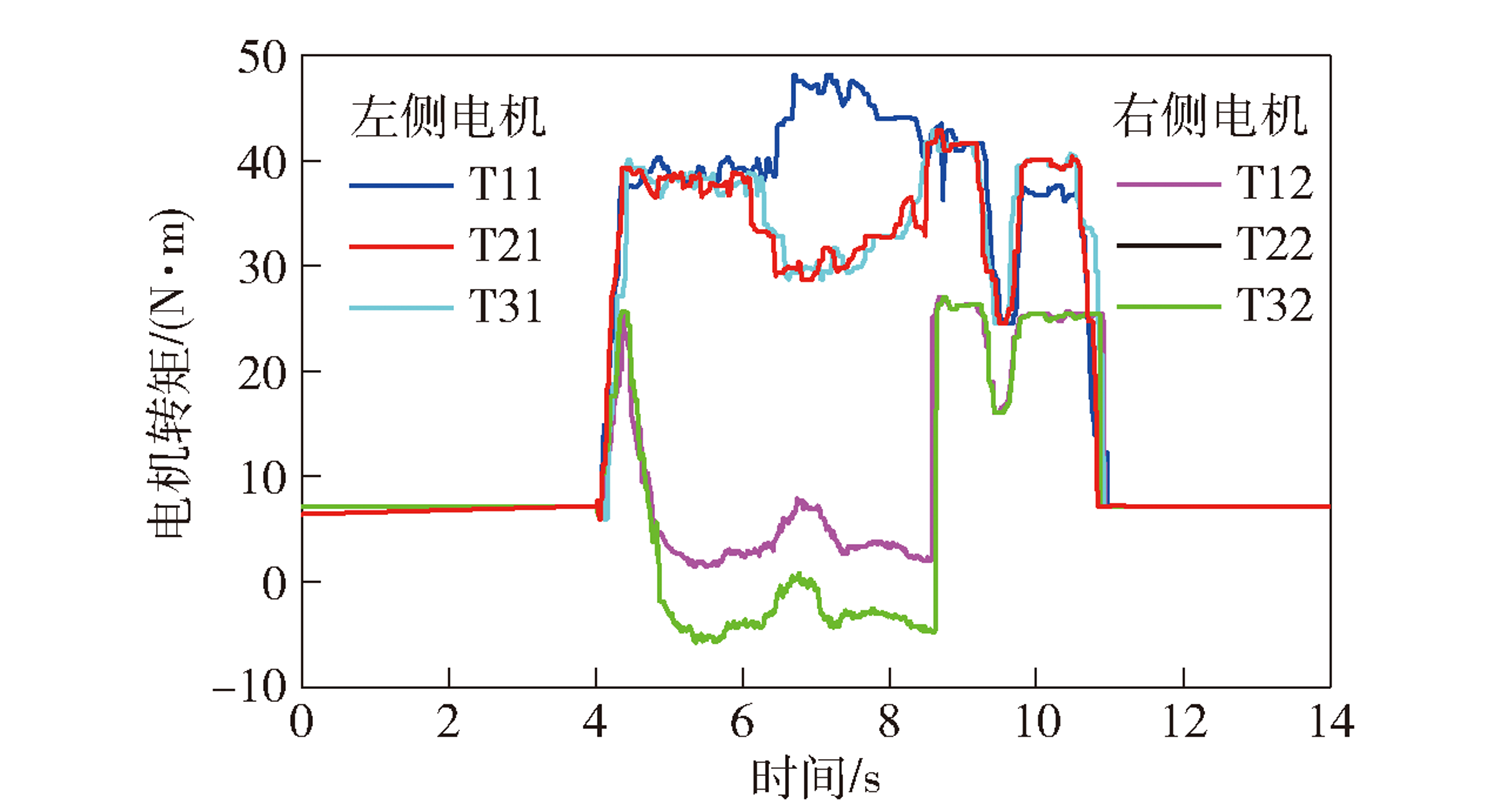
Fig.10 Results of torque after distribution
| [1] |
陈慧岩, 张玉. 军用地面无人机动平台技术发展综述[J]. 兵工学报, 2014, 35(10):1696-1706.
doi: 10.3969/j.issn.1000-1093.2014.10.026 |
|
|
|
| [2] |
|
| [3] |
doi: 10.1109/TCST.2008.2002264 URL |
| [4] |
doi: 10.1109/TVT.2020.2981619 URL |
| [5] |
doi: 10.1109/TVT.2020.3030863 URL |
| [6] |
doi: 10.1109/ACCESS.2018.2877801 URL |
| [7] |
余卓平, 杨鹏飞, 熊璐. 控制分配理论在车辆动力学控制中的应用[J]. 机械工程学报, 2014, 50(18):99-107.
|
|
|
|
| [8] |
doi: 10.1177/0954407019860614 URL |
| [9] |
doi: 10.1177/0954407020906626 URL |
| [10] |
|
| [11] |
史静平, 章卫国. 一种基于零空间的再分配伪逆算法[J]. 计算机仿真, 2009, 26(5):88-91.
|
|
|
|
| [12] |
|
| [13] |
doi: 10.1541/ieejjia.8.218 URL |
| [14] |
|
| [15] |
马诚诚, 刘春生, 王彪, 等. 基于直接分配法与零空间的控制分配策略[J]. 飞行力学, 2019, 37(4):56-61,67.
|
|
|
|
| [16] |
戴一凡. 分布式电驱动车辆纵横向运动综合控制[D]. 北京: 清华大学, 2013.
|
|
|
|
| [17] |
doi: 10.1016/j.ymssp.2017.12.018 URL |
| [1] | SHI Junfei, QIAN Linfang, CHEN Guangsong, YIN Qiang, LIU Daokun, LI Zhonggang. Research on the Procedural Burning Characteristics of Cased Telescoped Ammunition Based on Digital Image Correlation Principle [J]. Acta Armamentarii, 2024, 45(4): 1047-1059. |
| [2] | CHEN Baihan, ZHAO Shengwei, ZOU Huihui, WANG Weiguang, DAI Xianghui, WANG Kehui. Research Progress of Overload Signal Characteristics and Processing Technologies of Penetrating Projectile [J]. Acta Armamentarii, 0, (): 0-0. |
| [3] | YAN Qingdong, ZHU Ming, WEI Wei, LIU Cheng, WANG Meiwei. Analysis of Contact Dynamics Characteristics of Tire-snow Interaction in Semi-infinite Snow Region [J]. Acta Armamentarii, 2024, 45(3): 925-933. |
| [4] | LIU Ju, ZHANG Guokai, WANG Zhen, YAO Jian, LI Jie, YU Siyuan, JI Yuguo. Experimental Study on the Damage Characteristics and Laws of RC Beams under Close-in Blast Loading of Thermobaric Explosives [J]. Acta Armamentarii, 2024, 45(3): 864-874. |
| [5] | BAO Dan, WEI Yukai, JIN Xin, HOU Baolin. Adaptive Control of Magazines Considering Output Constraints and Input Saturation [J]. Acta Armamentarii, 2024, 45(3): 789-797. |
| [6] | WANG Liang, WANG Shoukun, Niu Tianwei, WANG Junzheng . Speed control method of unmanned special vehicle based on terrain feature time-frequency transform [J]. Acta Armamentarii, 0, (): 0-0. |
| [7] | WANG Wei, YU Zhichen, LIN Shiyao, YANG Jing, WANG Hong. Three-dimensional Leader-follower Cooperative Guidance Law with Maneuvering Target [J]. Acta Armamentarii, 0, (): 0-0. |
| [8] | WANG Xinwei, YAN Xiaopeng, HAO Xinhong, CHEN Qile, HUANG Dingkun. A High Resolution DOA Method Based on Synthetic Virtual Array for Pulse Doppler Fuze [J]. Acta Armamentarii, 2024, 45(1): 97-104. |
| [9] | LI Zhaodong, ZHAO Xijun, YANG Tingting, QI Xiaolong, ZHOU Changyi, ZHANG Liming. Key Technologies and Application Prospects for High-definition Map in Off-road Environments [J]. Acta Armamentarii, 2023, 44(S2): 1-11. |
| [10] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [11] | MA Jingqi, YU Qiwen, HUANG Ping, WANG Wei, LI Youwei. A Real-time Compression Algorithm of Color Point Cloud Streams for Environmental Scanning [J]. Acta Armamentarii, 2023, 44(S2): 167-177. |
| [12] | YANG Jing, WU Jinping, LIU Jian, WANG Yongjie, DONG Hanquan. A Semi-Supervised Learning Method for Intelligent Decision Making of Submarine Maneuver Defense [J]. Acta Armamentarii, 0, (): 0-0. |
| [13] | ZHOU Longyun, LI Xiaojun, YAN Qiushi. Analysis on Dynamic Response of Bridge Pier under Near-field Underwater Explosion Loading [J]. Acta Armamentarii, 2023, 44(S1): 90-98. |
| [14] | QI Xiaopeng, ZHANG Jie, ZHAO Tingting, WANG Zhiyong, WANG Zhihua. The Failure Patterns of Concrete Slabs with Different Aggregate Gradations under Contact Blast Loading [J]. Acta Armamentarii, 2023, 44(12): 3641-3653. |
| [15] | WANG Mingyang, ZHENG Yuxuan, LI Tianpeng, CHEN Chun, WANG Yuanchao. Behavior of Segmented Projectile Penetrating into Ceramic/Steel Composite Armor [J]. Acta Armamentarii, 2023, 44(12): 3667-3675. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||