
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (5): 240595-.doi: 10.12382/bgxb.2024.0595
袁子龙1, 何非1,*( ), 赵建波2,3, 王少参3, 江明明1
), 赵建波2,3, 王少参3, 江明明1
收稿日期:2024-07-18
上线日期:2025-05-07
通讯作者:
基金资助:
YUAN Zilong1, HE Fei1,*(), ZHAO Jianbo2,3, WANG Shaoshen3, JIANG Mingming1
Received:2024-07-18
Online:2025-05-07
摘要:
针对航母舰载机弹药保障作业的时限性和复杂性,在已知保障任务的前提下,通过场景建模和任务分配等手段,提出一种面向阱口的舰载机弹药保障作业的调度优化方法。构建以避障原则的运输路径模型、以均衡原则的弹药分配模型,与兼顾实战性和高效性的舰载机弹药转运调度模型。结合实际作业情况,通过Safe A*算法和贪婪算法确定各阱口的保障对象,提出一种基于染色体片段编码的改进遗传算法,以最小化弹药保障作业完成时间为目标对调度模型进行求解。研究结果表明,新方法在优化方案耗时和资源利用等方面均优于其他分配策略和调度算法,验证了其在实际弹药保障过程中具有可行性和高效性。
中图分类号:
袁子龙, 何非, 赵建波, 王少参, 江明明. 航母舰载机保障作业任务分配及弹药转运调度优化方法[J]. 兵工学报, 2025, 46(5): 240595-.
YUAN Zilong, HE Fei, ZHAO Jianbo, WANG Shaoshen, JIANG Mingming. Optimization Method of Carrier-borne Aircraft Support Operation Assignment and Ammunition Transport Scheduling[J]. Acta Armamentarii, 2025, 46(5): 240595-.
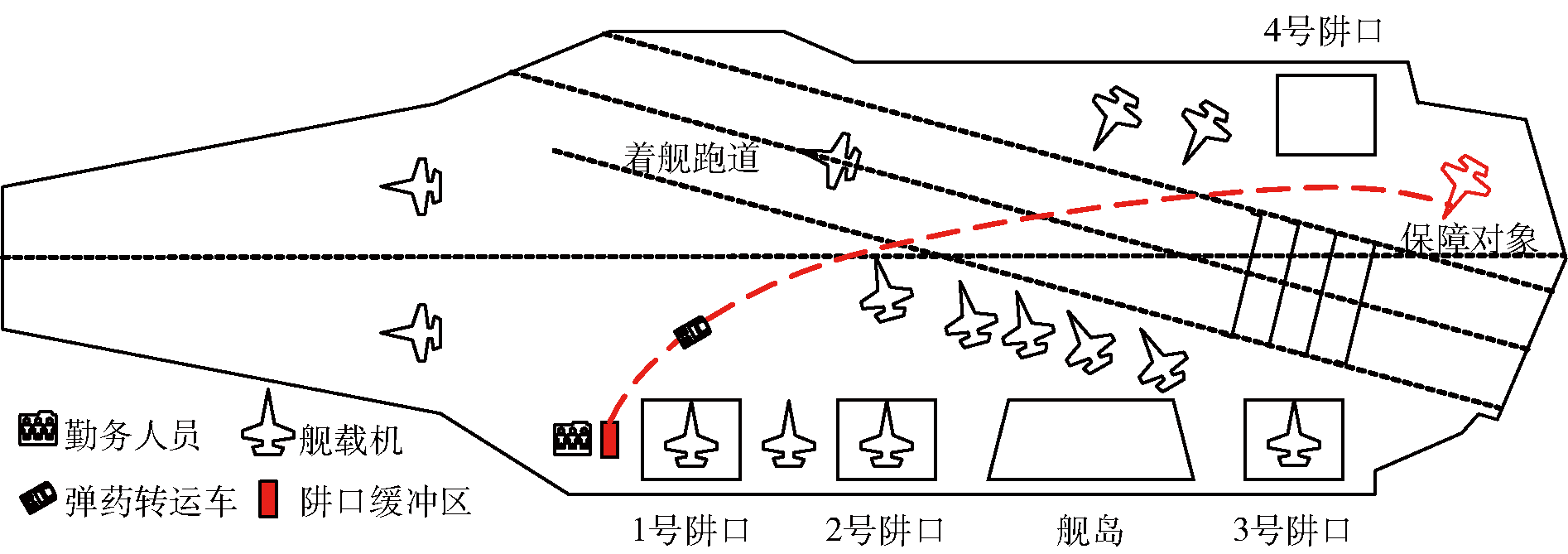
图1 航母甲板弹药保障作业示意图
Fig.1 Schematic diagram of ammunition support operation on the aircraft carrier deck
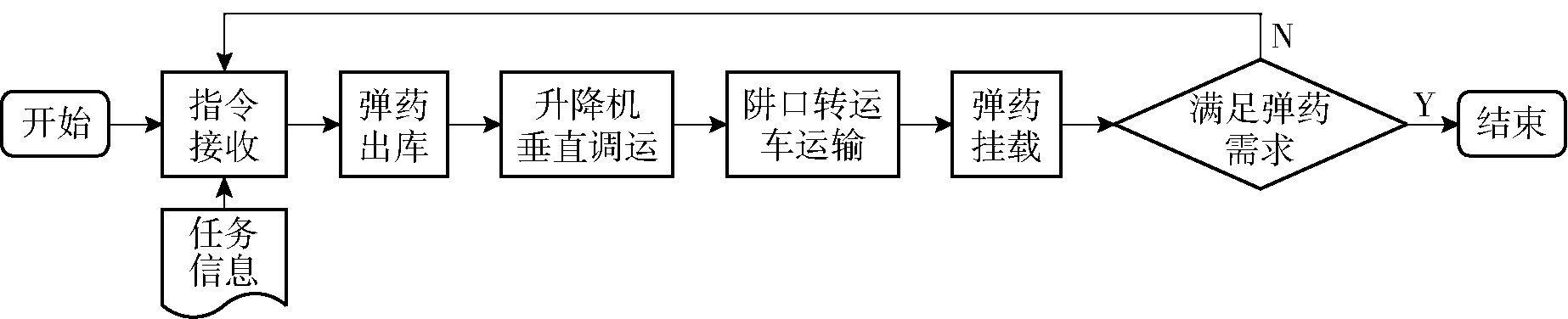
图2 舰载机弹药保障作业流程示意图
Fig.2 Schematic diagram of operation process of carrier-borne aircraft ammunition support

图3 舰载机膨胀处理
Fig.3 Expansion treatment of carrier-based aircraft
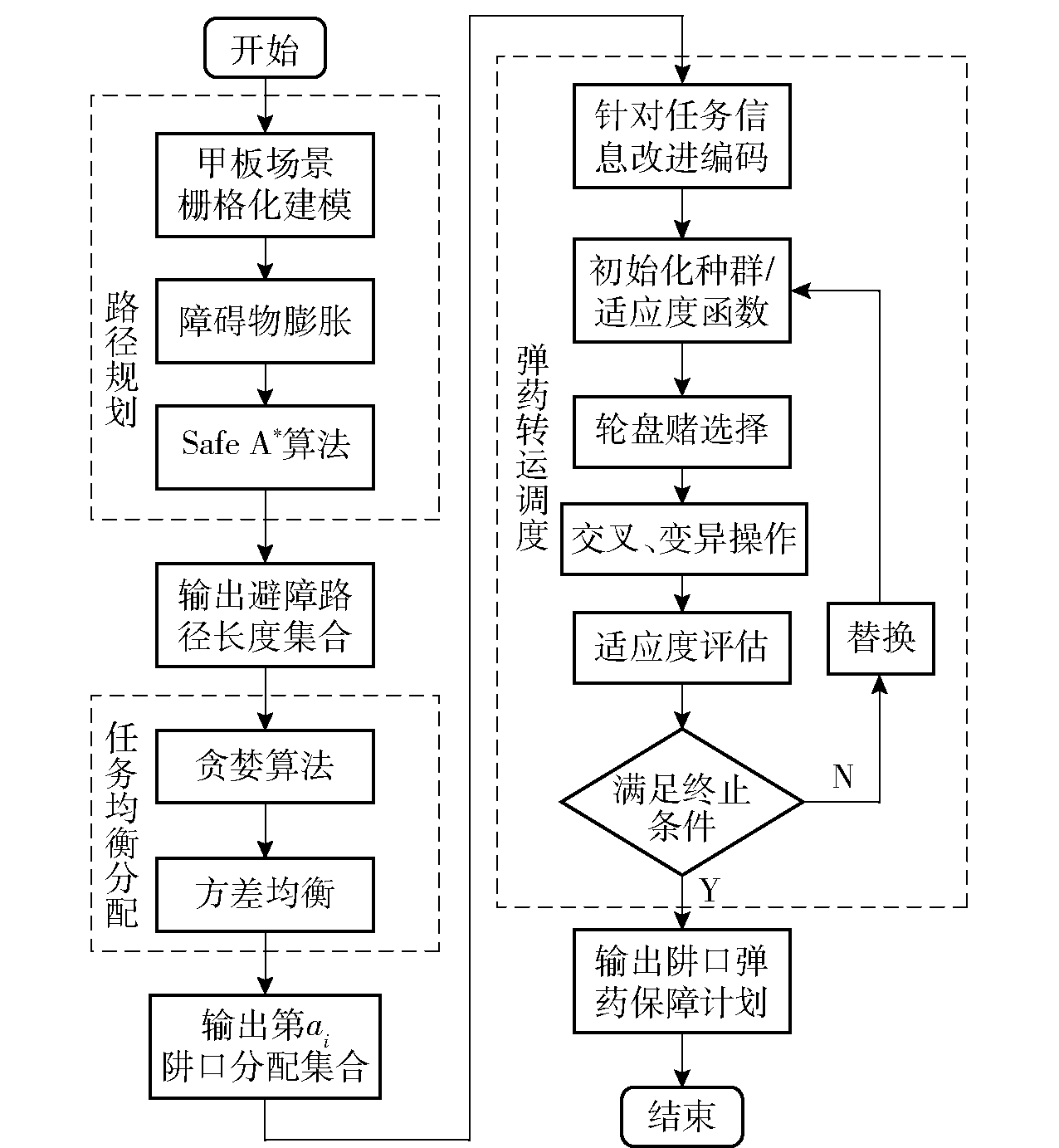
图4 算法求解流程图
Fig.4 Algorithm flow chart

图5 染色体编码示例
Fig.5 Example of chromosome code
| 算法: | 车辆调度冲突处理与优先级校验修正 | |
|---|---|---|
| 输入: | 任务列表tasks (包含优先级信息),车辆使用情况vehicle_usage,转运时间transport_times,车辆列表vehicles | |
| 输出: | 校正后的方案安排 | |
| 1 | 初始化车辆使用表vehicle_usage | |
| 2 | 对任务列表tasks按优先级从高到低排序 | |
| 3 | For task in tasks: | |
| 4 | 取出任务的转运车vehicle,开始时间start_time,优先级priority | |
| 5 | If vehicle在使用中: | |
| 6 | 获取上一次的结束时间last_end_time | |
| 7 | 计算回程空窗期=last_end_time + transport_times[vehicle] | |
| 8 | If start_time <回程空窗期: | |
| 9 | 检查当前任务与占用任务的优先级 | |
| 10 | If当前任务优先级较高: | |
| 11 | 将占用任务的start_time推迟到回程空窗期 | |
| 12 | 更新占用任务的结束时间 | |
| 13 | else | |
| 14 | 更新当前任务的start_time=回程空窗期 | |
| 15 | 检查是否有空闲车辆free_vehicle: | |
| 16 | If存在free_vehicle: | |
| 17 | 重新分配任务到free_vehicle,并更新该车辆的使用时间 | |
| 18 | else | |
| 19 | 任务必须等待,更新start_time=回程空窗期 | |
| 20 | 重新计算任务的end_time=start_time+duration | |
| 21 | 更新vehicle_usage[vehicle]=end_time | |
| 22 | Back调整后的任务时间安排 |
| 算法: | 车辆调度冲突处理与优先级校验修正 | |
|---|---|---|
| 输入: | 任务列表tasks (包含优先级信息),车辆使用情况vehicle_usage,转运时间transport_times,车辆列表vehicles | |
| 输出: | 校正后的方案安排 | |
| 1 | 初始化车辆使用表vehicle_usage | |
| 2 | 对任务列表tasks按优先级从高到低排序 | |
| 3 | For task in tasks: | |
| 4 | 取出任务的转运车vehicle,开始时间start_time,优先级priority | |
| 5 | If vehicle在使用中: | |
| 6 | 获取上一次的结束时间last_end_time | |
| 7 | 计算回程空窗期=last_end_time + transport_times[vehicle] | |
| 8 | If start_time <回程空窗期: | |
| 9 | 检查当前任务与占用任务的优先级 | |
| 10 | If当前任务优先级较高: | |
| 11 | 将占用任务的start_time推迟到回程空窗期 | |
| 12 | 更新占用任务的结束时间 | |
| 13 | else | |
| 14 | 更新当前任务的start_time=回程空窗期 | |
| 15 | 检查是否有空闲车辆free_vehicle: | |
| 16 | If存在free_vehicle: | |
| 17 | 重新分配任务到free_vehicle,并更新该车辆的使用时间 | |
| 18 | else | |
| 19 | 任务必须等待,更新start_time=回程空窗期 | |
| 20 | 重新计算任务的end_time=start_time+duration | |
| 21 | 更新vehicle_usage[vehicle]=end_time | |
| 22 | Back调整后的任务时间安排 |
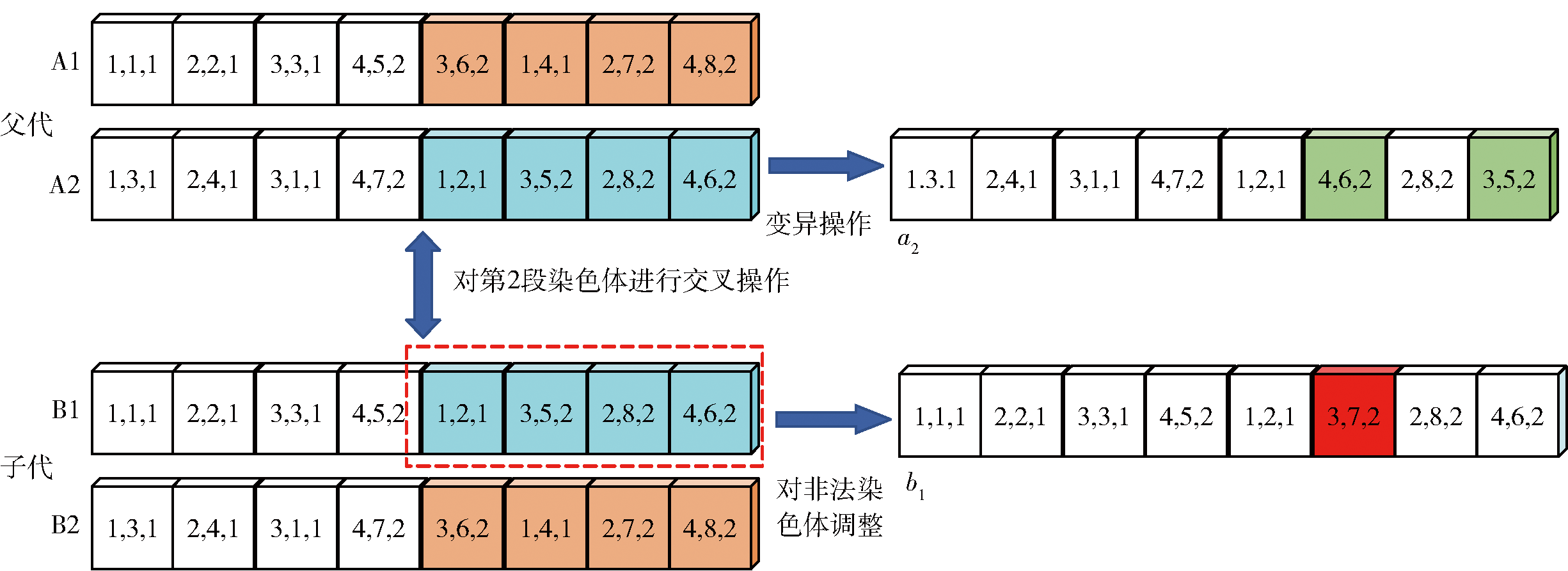
图6 交叉、变异操作示意图
Fig.6 Schematic diagram of crossover and variant operation
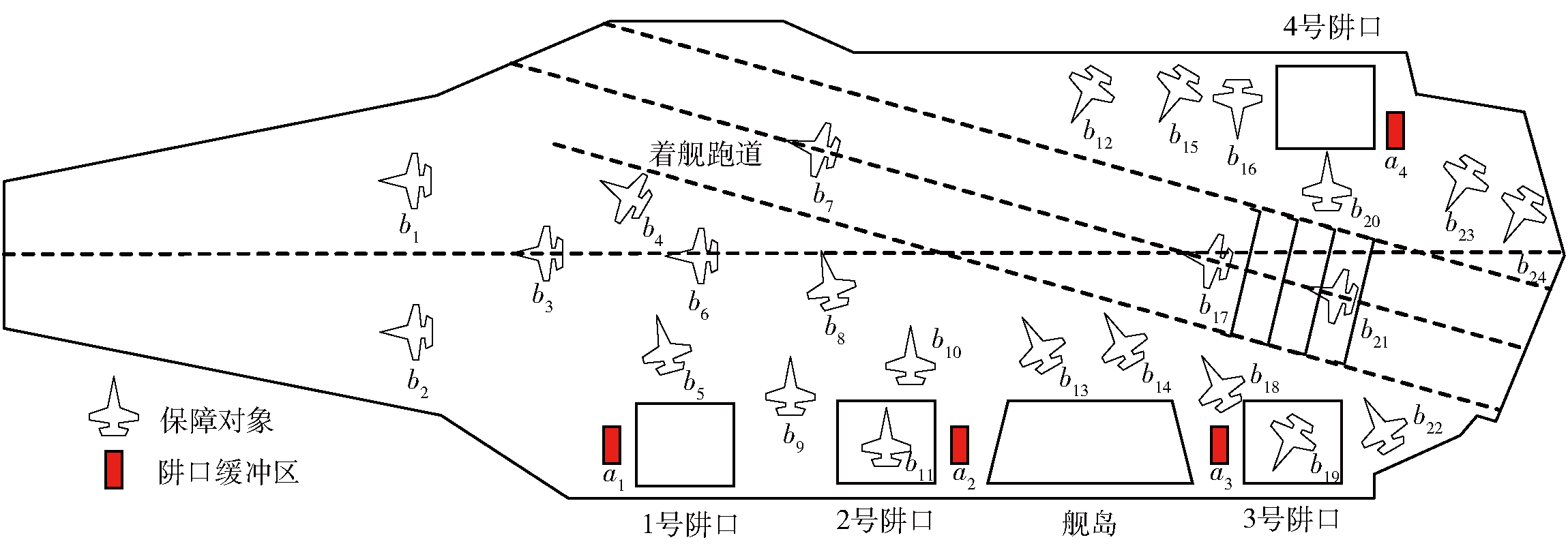
图7 航母甲板弹药保障任务场景图
Fig.7 Scene diagram of ammunition support mission on aircraft carrier deck
| 弹药转运车 类型cg | 弹药运输 类型dk | 弹药运输 类型数量cgk | 运输速度cg,v/ (m·min-1) |
|---|---|---|---|
| Ⅰ | AAM/AGM/ASM | 2/2/1 | 20 |
| Ⅱ | AGM/ASM | 2/1 | 30 |
| Ⅲ | ASM | 1 | 25 |
表1 弹药转运车信息
Table 1 Information table of ammunition transfer vehicle
| 弹药转运车 类型cg | 弹药运输 类型dk | 弹药运输 类型数量cgk | 运输速度cg,v/ (m·min-1) |
|---|---|---|---|
| Ⅰ | AAM/AGM/ASM | 2/2/1 | 20 |
| Ⅱ | AGM/ASM | 2/1 | 30 |
| Ⅲ | ASM | 1 | 25 |
| 阱口 缓冲区 | 中心 坐标/cm | 转运车数量/辆 | 车辆 编号cs | ||
|---|---|---|---|---|---|
| 类型Ⅰ | 类型Ⅱ | 类型Ⅲ | |||
| a1 | (37.5,25) | 2 | 4 | 4 | 1~10 |
| a2 | (58.5,25) | 1 | 5 | 4 | 11~20 |
| a3 | (77.5,25) | 3 | 3 | 4 | 21~30 |
| a4 | (87.5,8) | 2 | 2 | 6 | 31~40 |
表2 阱口缓冲区任务信息
Table 2 Mission information table of elevator hatch buffer areas
| 阱口 缓冲区 | 中心 坐标/cm | 转运车数量/辆 | 车辆 编号cs | ||
|---|---|---|---|---|---|
| 类型Ⅰ | 类型Ⅱ | 类型Ⅲ | |||
| a1 | (37.5,25) | 2 | 4 | 4 | 1~10 |
| a2 | (58.5,25) | 1 | 5 | 4 | 11~20 |
| a3 | (77.5,25) | 3 | 3 | 4 | 21~30 |
| a4 | (87.5,8) | 2 | 2 | 6 | 31~40 |
| 舰载机 保障站位 | 中心 坐标/cm | 弹药需求 (AAM,AGM,ASM) |
|---|---|---|
| b1 | (24.5,11.5) | (0,2,2) |
| b2 | (24.5,19.5) | (2,0,2) |
| b3 | (32.5,14.5) | (0,2,2) |
| b4 | (38.5,11.5) | (2,0,2) |
| b5 | (40.5,19.5) | (0,2,2) |
| b6 | (42.5,14.5) | (0,2,2) |
| b7 | (44.5,9.5) | (2,0,2) |
| b8 | (50.5,16.5) | (2,2,0) |
| b9 | (48.5,22.5) | (2,2,0) |
| b10 | (55.5,20.5) | (2,0,2) |
| b11 | (54,25) | (2,2,0) |
| b12 | (66.5,6.5) | (0,2,2) |
| b13 | (63.5,19.5) | (2,0,2) |
| b14 | (69.5,20.5) | (2,2,0) |
| b15 | (72.5,6.5) | (0,2,2) |
| b16 | (76.5,6.5) | (2,2,0) |
| b17 | (72.5,15.5) | (0,2,2) |
| b18 | (74.5,21.5) | (2,0,2) |
| b19 | (81,25) | (0,2,2) |
| b20 | (83.5,11.5) | (2,0,2) |
| b21 | (83.5,17.5) | (2,0,2) |
| b22 | (86.5,24.5) | (0,2,2) |
| b23 | (91.5,10.5) | (0,2,2) |
| b24 | (95.5,12.5) | (2,2,0) |
表3 保障舰载机任务信息
Table 3 Mission information table of carrier-borne aircraft
| 舰载机 保障站位 | 中心 坐标/cm | 弹药需求 (AAM,AGM,ASM) |
|---|---|---|
| b1 | (24.5,11.5) | (0,2,2) |
| b2 | (24.5,19.5) | (2,0,2) |
| b3 | (32.5,14.5) | (0,2,2) |
| b4 | (38.5,11.5) | (2,0,2) |
| b5 | (40.5,19.5) | (0,2,2) |
| b6 | (42.5,14.5) | (0,2,2) |
| b7 | (44.5,9.5) | (2,0,2) |
| b8 | (50.5,16.5) | (2,2,0) |
| b9 | (48.5,22.5) | (2,2,0) |
| b10 | (55.5,20.5) | (2,0,2) |
| b11 | (54,25) | (2,2,0) |
| b12 | (66.5,6.5) | (0,2,2) |
| b13 | (63.5,19.5) | (2,0,2) |
| b14 | (69.5,20.5) | (2,2,0) |
| b15 | (72.5,6.5) | (0,2,2) |
| b16 | (76.5,6.5) | (2,2,0) |
| b17 | (72.5,15.5) | (0,2,2) |
| b18 | (74.5,21.5) | (2,0,2) |
| b19 | (81,25) | (0,2,2) |
| b20 | (83.5,11.5) | (2,0,2) |
| b21 | (83.5,17.5) | (2,0,2) |
| b22 | (86.5,24.5) | (0,2,2) |
| b23 | (91.5,10.5) | (0,2,2) |
| b24 | (95.5,12.5) | (2,2,0) |

图8 各阱口缓冲区保障路径
Fig.8 Support path of elevator hatch buffer area
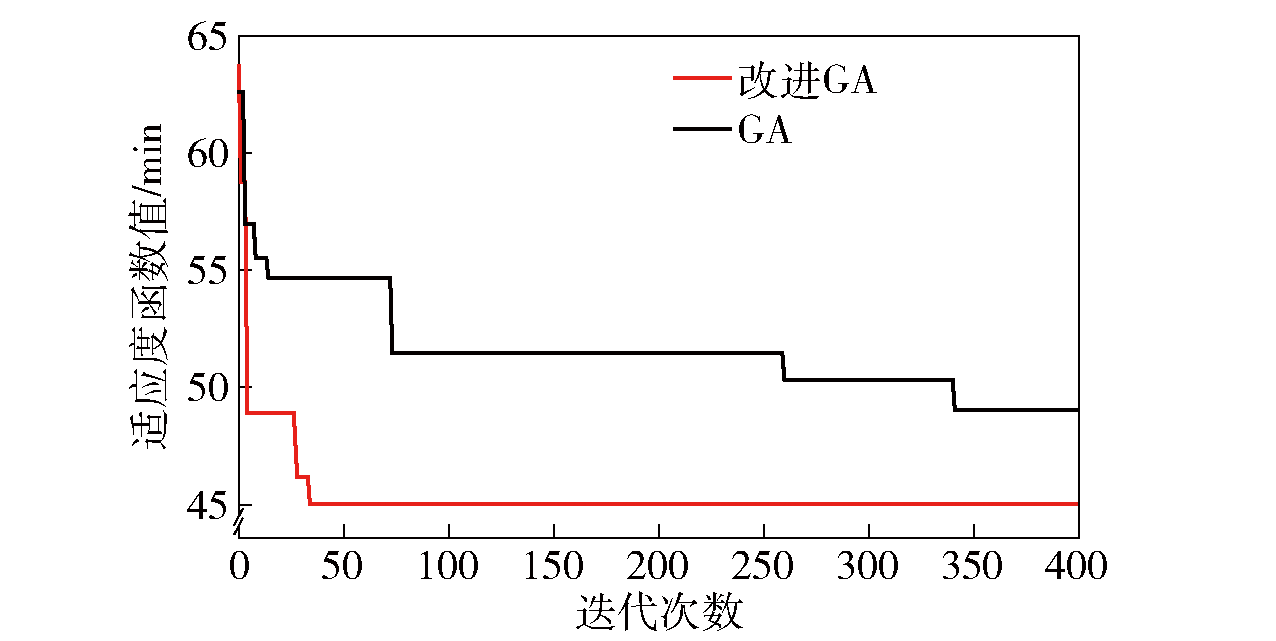
图9 算法迭代过程对比图
Fig.9 Comparison chart of algorithm iteration process
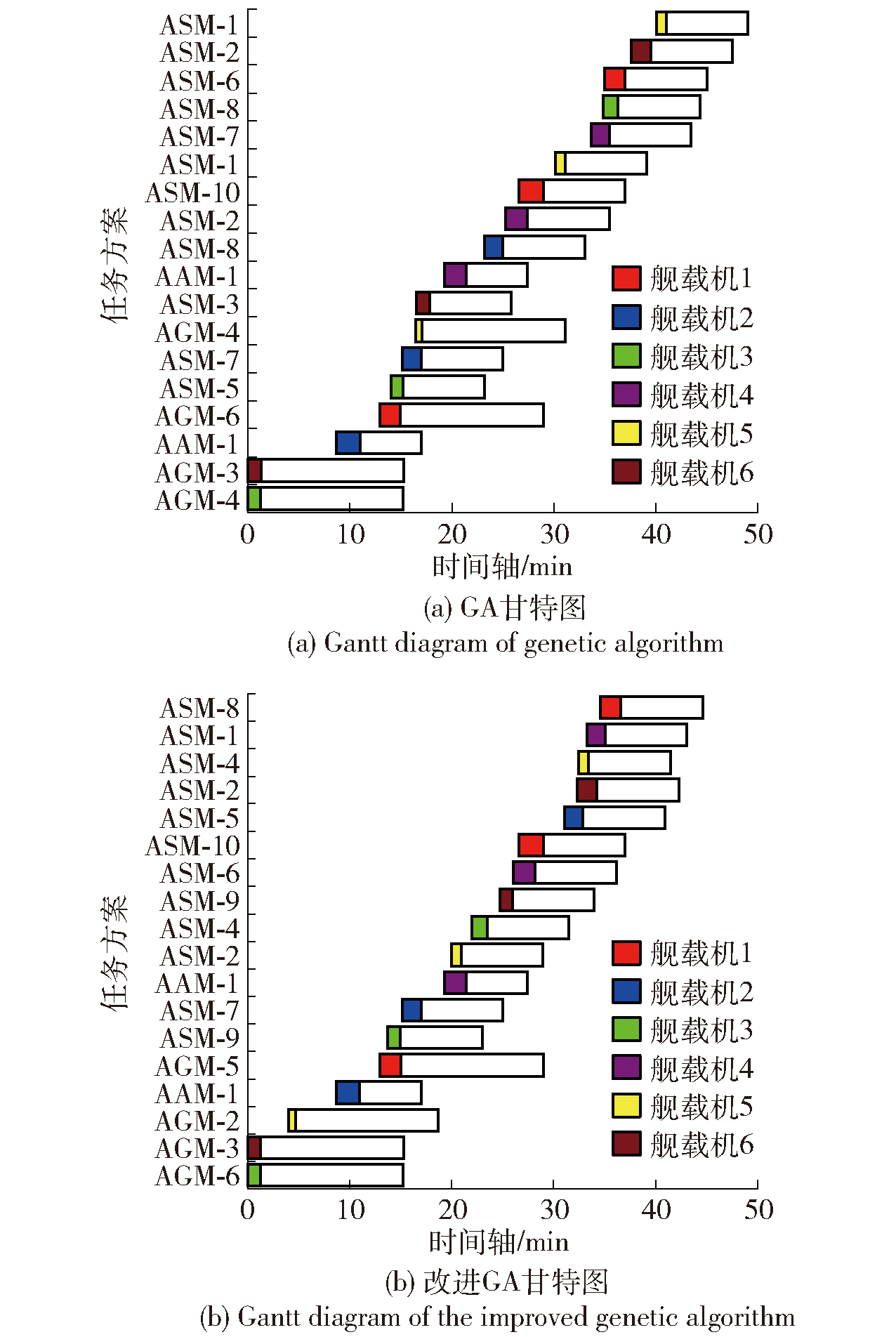
图10 舰载机弹药转运调度方案甘特图
Fig.10 Gantt diagram of carrier-borne aircraft ammunition transfer and scheduling scheme
| 结果 | 改进GA | 传统GA |
|---|---|---|
| 车辆平均利用率/% | 43.01 | 39.46 |
| 舰载机等待总耗时/min | 24.62 | 31.25 |
| 最优解耗时/min | 45.00 | 49.03 |
| 最优解收敛代数 | 34 | 341 |
| 算法平均执行时间/s | 1.24 | 1.67 |
表4 算例结果对比
Table 4 Comparison of the example results
| 结果 | 改进GA | 传统GA |
|---|---|---|
| 车辆平均利用率/% | 43.01 | 39.46 |
| 舰载机等待总耗时/min | 24.62 | 31.25 |
| 最优解耗时/min | 45.00 | 49.03 |
| 最优解收敛代数 | 34 | 341 |
| 算法平均执行时间/s | 1.24 | 1.67 |
| 分配策略 | 考虑优先级 | 最优解/min |
|---|---|---|
| 路径均衡 | 是 | 45.00 |
| 否 | 34.10 | |
| 路径最近 | 是 | 49.27 |
| 否 | 36.64 | |
| 对象轮询 | 是 | 50.15 |
| 否 | 37.26 |
表5 不同策略最优解对比(优先级)
Table 5 Optimal solutions of different strategies (priority)
| 分配策略 | 考虑优先级 | 最优解/min |
|---|---|---|
| 路径均衡 | 是 | 45.00 |
| 否 | 34.10 | |
| 路径最近 | 是 | 49.27 |
| 否 | 36.64 | |
| 对象轮询 | 是 | 50.15 |
| 否 | 37.26 |
| 3种分配策略 | 8架舰载机 最优解/min | 16架舰载机 最优解/min | 24架舰载机 最优解/min |
|---|---|---|---|
| 路径均衡 | 33.07 | 36.77 | 45.00 |
| 路径最近 | 34.82 | 38.80 | 48.27 |
| 对象轮询 | 35.13 | 40.25 | 50.15 |
表6 不同策略最优解对比(保障数量)
Table 6 Optimal solutions of different strategies (guaranteed quantity)
| 3种分配策略 | 8架舰载机 最优解/min | 16架舰载机 最优解/min | 24架舰载机 最优解/min |
|---|---|---|---|
| 路径均衡 | 33.07 | 36.77 | 45.00 |
| 路径最近 | 34.82 | 38.80 | 48.27 |
| 对象轮询 | 35.13 | 40.25 | 50.15 |
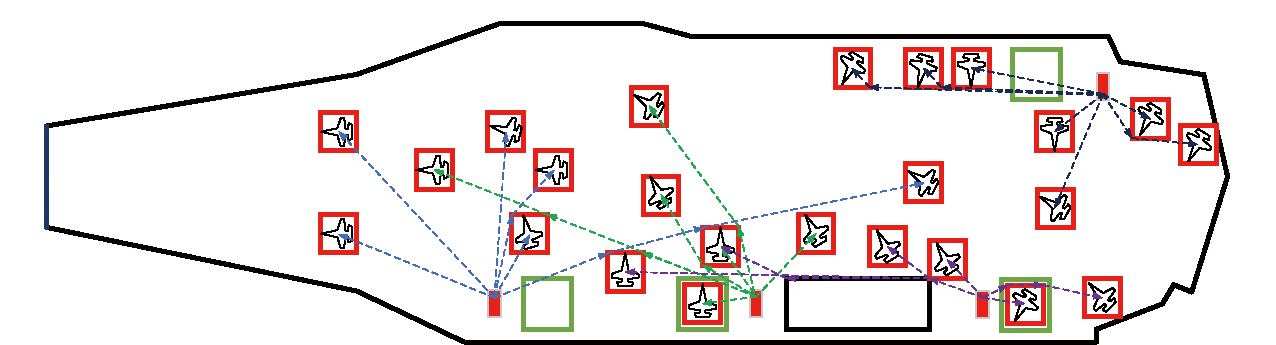
图11 24架舰载机阱口分配方案
Fig.11 The elevator hatch distribution scheme of 24 carrier-borne aircrafts
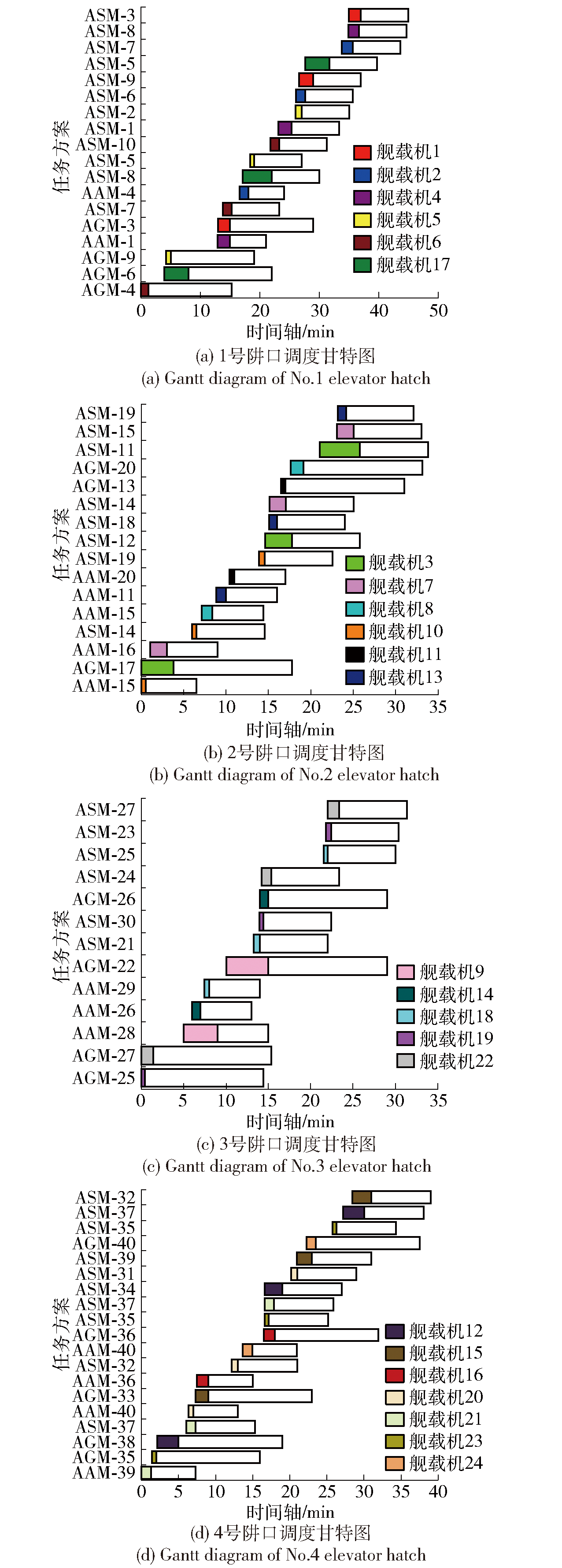
图12 各阱口调度方案甘特图
Fig.12 Gantt diagram of elevator hatch scheduling scheme
| [1] |
李亚飞, 吴庆顺, 徐明亮, 等. 基于强化学习的舰载机保障作业实时调度方法[J]. 中国科学:信息科学, 2021, 51(2):247-262.
|
|
|
|
| [2] |
张少辉, 刘舜, 李亚飞, 等. 航空母舰舰载机弹药保障作业调度优化算法[J]. 航空学报, 2023, 44(20): 228485.
doi: 10.7527/S1000-6893.2023.28485 |
|
doi: 10.7527/S1000-6893.2023.28485 |
|
| [3] |
苏析超, 伍恒, 崔荣伟, 等. 基于边际-人工蜂群算法的舰载机机群出动保障人员配置-调度联合优化方法[J]. 北京航空航天大学学报, 2020, 46(11): 2056-2068.
|
|
|
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
刘东, 吴家仁, 周一舟, 等. 舰载机综合保障技术实践及发展展望[J]. 航空学报, 2021, 42(8): 525802.
doi: 10.7527/S1000-6893.2021.25802 |
|
doi: 10.7527/S1000-6893.2021.25802 |
|
| [8] |
吴勇, 潘星, 康锐, 等. 基于图示评审技术的舰载机航空保障时间分析[J]. 兵工学报, 2013, 34(12): 1611-1615.
doi: 10.3969/j.issn.1000-1093.2013.12.018 |
|
doi: 10.3969/j.issn.1000-1093.2013.12.018 |
|
| [9] |
金钊, 金璐, 张博闻, 等. 舰载机弹药保障作业调度的形式化建模与验证[J]. 软件学报, 2024, 35(9): 1-23.
|
|
|
|
| [10] |
|
| [11] |
陶俊权, 苏析超, 韩维, 等. 基于EDA算法的航母弹药调度优化研究[J]. 兵器装备工程学报, 2022, 43(5): 125-131.
|
|
|
|
| [12] |
范加利, 黄葵, 朱兴动, 等. 基于禁忌算法的舰载机甲板作业动态调度优化算法[J]. 系统工程与电子技术, 2023, 45(10):3172-3182.
doi: 10.12305/j.issn.1001-506X.2023.10.22 |
|
doi: 10.12305/j.issn.1001-506X.2023.10.22 |
|
| [13] |
刘子玄, 万兵, 苏析超, 等. 基于HA算法的舰载机出动作业调度方法[J]. 系统工程与电子技术, 2024, 46(5): 1691-1702.
doi: 10.12305/j.issn.1001-506X.2024.05.22 |
|
doi: 10.12305/j.issn.1001-506X.2024.05.22 |
|
| [14] |
罗湘勇, 冯浩源, 潘星, 等. 面向流程的保障体系集成建模方法研究[J]. 系统工程与电子技术, 2013, 35(11):2314-2319.
|
|
|
|
| [15] |
韩维, 苏析超, 陈俊锋. 舰载机多机一体化机务保障调度方法[J]. 系统工程与电子技术, 2015, 37(4): 809-816.
|
|
|
|
| [16] |
|
| [17] |
|
| [18] |
陈宝童, 王丽清, 蒋晓敏, 等. 群智协同任务分配研究综述[J]. 计算机工程与应用, 2021, 57(20):1-12.
doi: 10.3778/j.issn.1002-8331.2105-0396 |
|
doi: 10.3778/j.issn.1002-8331.2105-0396 |
|
| [19] |
李彦征, 陈浩, 赵文政, 等. 多工位多机器人装配过程的分布式点焊任务分配方法[J]. 计算机集成制造系统, 2023, 29(3):781-788.
|
|
|
|
| [20] |
|
| [21] |
杜伟伟, 陈小伟. 陆军战术级作战任务分配及优化方法[J]. 兵工学报, 2023, 44(5):1431-1442.
|
|
doi: 10.12382/bgxb.2022.0007 |
|
| [22] |
裘镓荣, 曾鹏飞, 邵伟平, 等. 基于PSO-LSSVM弹药装配质量预测方法[J]. 兵工学报, 2022, 43(9):2379-2387.
|
|
doi: 10.12382/bgxb.2021.0867 |
|
| [23] |
吕晓峰, 杨东泽, 马羚, 等. 基于改进遗传算法的舰载机弹药挂载调度[J]. 电光与控制, 2024, 31(1): 82-86.
|
|
|
|
| [24] |
张韬, 项祺, 郑婉文, 等. 基于改进A*算法的路径规划在海战兵棋推演中的应用[J]. 兵工学报, 2022, 43(4): 960-968.
doi: 10.12382/bgxb.2021.0209 |
|
|
|
| [25] |
赵鹏程, 宋保维, 毛昭勇, 等. 基于改进的复合自适应遗传算法的UUV水下回收路径规划[J]. 兵工学报, 2022, 43(10):2598-2608.
|
|
doi: 10.12382/bgxb.2021.0474 |
|
| [26] |
|
| [1] | 野汶博, 方洋旺, 洪瑞阳, 胡祁东. 基于控制障碍函数的欠驱动无人水下航行器椭圆障碍物避障制导[J]. 兵工学报, 2025, 46(5): 240404-. |
| [2] | 何洋, 李刚. 基于速度障碍模型的智能汽车轨迹规划控制方法研究[J]. 兵工学报, 2025, 46(4): 240058-. |
| [3] | 陈琦, 覃国样. 混合驱动水下机器人浮游与爬行双模式轨迹跟踪控制[J]. 兵工学报, 2024, 45(9): 3216-3229. |
| [4] | 刘进容, 李伟. SERF原子自旋陀螺仪中的碱金属气室无磁加热高精度温度控制[J]. 兵工学报, 2024, 45(9): 3288-3296. |
| [5] | 申程, 张连超, 张卓, 朱文亮, 陈雨康. 轻量化弹道解算系统火控修正和瞄准线滤波预测[J]. 兵工学报, 2024, 45(2): 429-442. |
| [6] | 丁文俊, 张国宗, 刘海旻, 柴亚军, 王驰宇, 毛昭勇. 面向海流扰动和通信时延的欠驱动AUV编队跟踪控制[J]. 兵工学报, 2024, 45(1): 184-196. |
| [7] | 方秋雨, 张蕴霖, 麻壮壮, 邵晋梁. 未知环境下基于控制障碍函数的无人车轨迹规划[J]. 兵工学报, 2023, 44(S2): 90-102. |
| [8] | 黄鑫, 畅晨旭, 李小杭, 苏庆宇. 基于协同交互型观测器的虚假数据注入攻击信号重构方法[J]. 兵工学报, 2023, 44(11): 3359-3368. |
| [9] | 张聪, 刘爽, 姜思远, 刘世纪. 多作动器协同的特种车辆行车调平控制方法[J]. 兵工学报, 2023, 44(1): 98-107. |
| [10] | 钱林方, 孙乐, 陈光宋, 佟明昊, 邹权. 无位置传感器电机控制在火炮装填应用的关键技术研究[J]. 兵工学报, 2022, 43(10): 2417-2428. |
| [11] | 修杨, 邓宏彬, 危怡然, 李东方. 基于参数估计的四旋翼无人机自适应鲁棒路径跟随控制器[J]. 兵工学报, 2022, 43(8): 1926-1938. |
| [12] | 纪广, 郝建国, 张振伟. 面向无人机作战的虚拟孪生系统设计方案[J]. 兵工学报, 2022, 43(8): 1902-1912. |
| [13] | 郭擘, 柯芳, 余潇, 高歆杨, 孙爱鲜. 基于滑模变结构控制的光电稳定平台控制策略研究[J]. 兵工学报, 2022, 43(8): 1874-1880. |
| [14] | 苗双全, 张宝泉, 王明超, 王新伟, 沈宇. 基于扰动观测器的机载光电稳定平台自适应指数时变滑模控制[J]. 兵工学报, 2022, 43(7): 1636-1645. |
| [15] | 郭威, 吴凯, 周悦, 孙洪鸣, 徐高飞, 高森. 基于蚁群算法的深海着陆车路径规划[J]. 兵工学报, 2022, 43(6): 1387-1394. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4