| [1] |
SUN C L, XU X J, WANG W H, et al. Influence on stern flaps in resistance performance of a caterpillar track amphibious vehicle[J]. IEEE Access, 2020,8:123828-123840.
|
| [2] |
RICHARD C. Amphibious vehicles for disaster relief and emergency medicine[J]. Prehospital and Disaster Medicine, 2022, 37(5):712-714.
|
| [3] |
DUDEK G, GIGUERE P, PRAHACS C, et al. AQUA:an amphibious autonomous robot[J]. IEEE Computer, 2007, 40(1):46-53.
|
| [4] |
CORNISH G J.U.S. Naval mine warfare strategy:analysis of the way ahead[R]. Carlisle,PA,US:U.S.Army War College, 2003.
|
| [5] |
李泽阳, 陈泰然, 刘昊然, 等. 水陆两栖无人平台技术研究进展[J]. 数字海洋与水下攻防, 2023, 6(3):259-273.
|
|
LI Z Y, CHEN T R, LIU H R, et al. Research progress of unmanned amphibious vehicles[J]. Digital Ocean & Underwater Warfare, 2023, 6(3):259-273. (in Chinese)
|
| [6] |
黄劲. 两栖车辆操纵特性数值计算[D]. 北京: 北京理工大学, 2014.
|
|
HUANG J. Numerical research of amphibious vehicle’s maneuverability[D]. Beijing: Beijing Institute of Technology, 2014. (in Chinese)
|
| [7] |
HELVACIOGLU S, HELVACIOGLU I H, TUNCER B. Improving the river crossing capability of an amphibious vehicle[J]. Ocean Engineering, 2011, 38(17/18):2201-2207.
|
| [8] |
SEIPT P R. LVT (X) lessons learned[R]. Washington,D.C.,US:U.S.Marine Corps,1985.
|
| [9] |
BELTRAN G. Analysis and simulation of the advanced amphibious assault vehicle (AAAV) electrical system architecture[D]. Monterey,CA,US:Naval Postgraduate School, 2000.
|
| [10] |
刘臣亚. 两栖车辆喷水推进系统优化设计方法研究及实现[D]. 北京: 北京理工大学, 2004.
|
|
LIU C Y. Research and implementation of optimization design method for waterjet propulsion system of amphibious vehicle[D]. Beijing: Beijing Institute of Technology, 2004. (in Chinese)
|
| [11] |
汪明德, 赵毓芹, 祝嘉光. 坦克行驶原理[M]. 北京: 国防工业出版社,1983.
|
|
WANG M D, ZHAO Y Q, ZHU J G. Tank driving principle[M]. Beijing: National Defense Industry Press,1983.
|
| [12] |
白佳喜. 基于两栖车辆的矢量喷水推进系统设计及其内部流动特性研究[D]. 北京: 北京理工大学, 2019.
|
|
BAI J X. Design of vector water-jet propulsion system and research of internal flow characteristics use in amphibious vehicles[D]. Beijing: Beijing Institute of Technology, 2019. (in Chinese)
|
| [13] |
CLARKE M, BLANCHARD T. Development of a control system for a skid-steer amphibious vehicle[C]// Proceedings of Towards Autonomous Robotic Systems 2010.Plymouth,Devon, UK: University of Plymouth,2010:41-46.
|
| [14] |
TEE Y H, TEOH B Y, TAN D, et al. Design considerations of autonomous amphibious vehicle (UTAR-AAV)[C]// Proceedings of 2010 IEEE Conference on Sustainable Utilization and Development in Engineering and Technology. Kuala Lumpur: IEEE,2010:13-18.
|
| [15] |
贾小平, 马骏, 于魁龙, 等. 超高速水陆两栖车技术研究[J]. 机械研究与应用, 2015, 28(5):46-49.
|
|
JIA X P, MA J, YU K L, et al. Technology research on ultra high speed amphibious vehicle[J]. Mechanical Research & Application, 2015, 28(5):46-49. (in Chinese)
|
| [16] |
SUN S F, WU J F, REN C L, et al. Chassis tra fficability simulation and experiment of a LY1352JP forest tracked vehicle[J]. Journal of Forestry Research, 2021, 32(3):1315-1325.
|
| [17] |
FLOM B D. DUKW-21 autonomous navigation:transitioning between sea and land:NSWCCD-CISD-2010/015[R]. West Bethesda,MD, US: Naval Surface Warfare Center,Carderock Division, 2010.
|
| [18] |
MARQUARDT J G, ALVAREZ J, VON ELLENRIEDER K D. Characterization and system identification of an unmanned amphibious tracked vehicle[J]. IEEE Journal of Oceanic Engineering, 2014, 39(4):641-661.
|
| [19] |
MARQUARDT J G. Development and experimental testing of an amphibious vehicle[D]. Boca Raton,FL, US: Florida Atlantic University, 2012.
|
| [20] |
KRYKHTIN Y I, KARLOV V I. Hydraulic shutter-control drive for the water-jet propulsion unit of a tracked amphibious vehicle[J]. Russian Engineering Research, 2020, 40(4):287-291.
|
| [21] |
LIN Q, XU X J, ZOU T A, et al. Design and simulation of an extended-range dynamic system for an amphibious vehicle[J]. IOP Conference Series:Materials Science and Engineering, 2018, 452(4):042153.
|
| [22] |
BAK A S, DURKIN P, BRUDER B, et al. Amphibious uncrewed ground vehicle for coastal surfzone survey[J]. Journal of Surveying Engineering, 2023, 149(4):1-9.
|
| [23] |
GREINER H, SHECTMAN A, WON C, et al. Autonomous legged underwater vehicles for near land warfare[C]// Proceedings of Symposium on Autonomous Underwater Vehicle Technology. Monterey,CA, US:IEEE,1996:41-48.
|
| [24] |
王晓兵. 六轮腿机器人的步态仿真[D]. 天津: 河北工业大学, 2015.
|
|
WANG X B. Gait simulation of six-leg-wheeled robot[D]. Tianjin: Hebei University of Technology, 2015. (in Chinese)
|
| [25] |
KHALED S. Speed control of autonomous amphibious vehicles[D]. Nordrhein-Westfalen,Siegen, Germany: University of Siegen, 2017.
|
| [26] |
CRESPI A, BADERTSCHER A, GUIGNARD A, et al. AmphiBot I:an amphibious snake-like robot[J]. Robotics and Autonomous Systems, 2005, 50(4):163-175.
|
| [27] |
YU S M, MA S G, LI B, et al. An amphibious snake-like robot:design and motion experiments on ground and in water[C]// Proceedings of International Conference on Information and Automation.Zhuhai/Macau, China:IEEE,2009:500-505.
|
| [28] |
PES. Pliant energy systems LLC[EB/OL]. (2020-02-03) [2021-08-05]. https://www.pliantenergy.com/robotics.
|
| [29] |
GREINER H, SHECTMAN A. Institute of electric and electronic engineer. autonomous legged underwater vehicles for near land warfare[C]// Proceedings of Symposium on Autonomous Underwater Vehicle Technology.Monterey,CA, US:IEEE,1996:41-48.
|
| [30] |
KARAKASILIOTIS K, THANDIACKAL R, MELO K, et al. From cineradiography to biorobots:an approach for designing robots to emulate and study animal locomotion[J]. Journal of the Royal Society Interface, 2016, 13(119):20151089.
|
| [31] |
SUN B A, LI W K, WANG Z Y, et al. Recent progress in modeling and control of bio-inspired fish robots[J]. Journal of Marine Science and Engineering, 2022, 10(6):773.
|
| [32] |
唐元贵, 张艾群, 俞建成. 一种轮足-尾鳍混合驱动的仿生水陆两栖机器人:CN201310640085.5[P]. 2015-06-03.
|
|
TANG Y G, ZHANG A Q, YU J C. A bionic amphibious robot driven by wheel-foot-tail fin hybrid:CN201310640085.5[P]. 2015-06-03. (in Chinese)
|
| [33] |
LI X L, JIANG L, LIU X X, et al. Modeling and implementation of a novel amphibious robot with multimode motion[J]. Industrial Robot, 2022, 49(5):947-961.
|
| [34] |
张少伟, 俞建成, 张艾群. 轮桨腿一体两栖机器人推进系统控制分配研究[J]. 机械设计与制造, 2010,(12):147-149.
|
|
ZHANG S W, YU J C, ZHANG A Q. Research on control allocation of a wheel-propeller-leg integrated amphibious robot[J]. Machinery Design & Manufacture, 2010,(12):147-149. (in Chinese)
|
| [35] |
ALEXANDER S B, MATTHEW A K, JEFFERY E K, et al. Design,simulation,fabrication and testing of a bio-inspired amphibious robot with multiple modes of mobility[J]. Journal of Robotics and Mechatronics, 2012, 24(4):629-641.
|
| [36] |
WANG G, LIU K X, MA X M, et al. Optimal design and implementation of an amphibious bionic legged robot[J]. Ocean Engineering, 2023,272:113823.
|
| [37] |
COHEN A, ZARROUK D. Design,analysis and experiments of a high-speed water hovering amphibious robot:AmphiSTAR[J]. IEEE Access, 2023,11:80874-80885.
|
| [38] |
马涛, 邬成杰. 气垫船总体性能与围裙气垫系统流体动力设计[M]. 北京: 国防工业出版社, 2012.
|
|
MA T, WU C J. Hovorcraft performance and skirt-cushion system dynamics design[M]. Beijing: Beijing Institute of Technology, 2012. (in Chinese)
|
| [39] |
王元慧, 王晓乐, 王成龙. 全垫升气垫船安全航行控制技术研究综述[J]. 哈尔滨工程大学学报, 2023, 44(9):1475-1486.
|
|
WANG Y H, WANG X L, WANG C L. Survey on the navigation control technology of air cushion vehicles[J]. Journal of Harbin Engineering University, 2023, 44(9):1475-1486. (in Chinese)
|
| [40] |
居乃鵕. 两栖车辆水动力学分析与仿真[M]. 北京: 兵器工业出版社,2005:186-226.
|
|
JU N J. Hydrodynamics analysis and simulation for amphibious vehicle[M]. Beijing: The Publishing House of Ordnance Industry,2005:186-226. (in Chinese)
|
| [41] |
JANG J Y, LIU T L, PAN K C. Numerical investigation on the hydrodynamic performance of amphibious wheeled armored vehicles[J]. Journal of the Chinese Institute of Engineers, 2019, 42(8):700-711.
|
| [42] |
DHANA F R, PARK J C, YOON H K. A numerical study on the influence of caterpillars to the resistance performance of an amphibious vehicle[J]. Journal of Marine Science and Engineering, 2023, 11(2):286.
|
| [43] |
PAN D B, XU X J, LIU B L. Numerical analysis on hydrodynamic performance and hydrofoil optimization for amphibious vehicles[J]. Physics of Fluids, 2023, 35(8):083330.
|
| [44] |
JING F J, LIU Y J, LIU G K. An overview on dynamic research of amphibious vehicles[J]. Applied Mechanics and Materials, 2014, 3485(1272):112-116.
|
| [45] |
高富东, 姜乐华, 潘存云. 基于计算流体动力学的两栖车辆水动力特性数值计算[J]. 机械工程学报, 2009, 45(5):134-139.
|
|
GAO F D, JIANG L H, PAN C Y. Numerical calculation on hydrodynamic characteristics for the amphibious vehicle based on computational fluid dynamics[J]. Journal of Mechanical Engineering, 2009, 45(5):134-139. (in Chinese)
|
| [46] |
周鹏飞. 轮式两栖车辆水上航行数值计算方法研究[D]. 北京: 北京理工大学, 2014.
|
|
ZHOU P F. Numerical calculation method research on wheeled amphibious vehicle sailing on the water[D]. Beijing: Beijing Institute of Technology, 2014. (in Chinese)
|
| [47] |
酒永胜. 高速两栖车迎浪直航航行特性研究[D]. 北京: 北京理工大学, 2016.
|
|
JIU Y S. Study on the navigating characteristics of high speed amphibious vehicle sailing in head sea[D]. Beijing: Beijing Institute of Technology, 2016. (in Chinese)
|
| [48] |
SHEN Y, XU X, ZHANG J, et al. The meshless direct simulation monte carlo method[J]. Journal of Computational Physics, 2023,481:112039.
|
| [49] |
SHANTANU S, PRATAP S V. A semi-implicit meshless method for incompressible flows in complex geometries[J]. Journal of Computational Physics, 2023,472:111715.
|
| [50] |
TU X B, WANG Q, ZHENG H N, et al. Meshless methods for magnetohydrodynamics with vector potential[J]. Journal of Computational Physics, 2022,470:111596.
|
| [51] |
WANG H, ZHU R C, GU M X, et al. Numerical investigation on steady wave of high-speed ship with transom stern by potential flow and CFD methods[J]. Ocean Engineering, 2022,247:110714.
|
| [52] |
HUISMANN I, STILLER J, FRÖHLICH J. Efficient high-order spectral element discretizations for building block operators of CFD[J]. Computers and Fluids, 2020,197:104386.
|
| [53] |
陈泰然, 耿昊, 王典, 等. 水陆两栖车辆水上运动特性实时仿真系统研究[J]. 兵工学报, 2024, 45(5):1402-1415.
doi: 10.12382/bgxb.2022.1237
|
|
CHEN T R, GENG H, WANG D, et al. Research on the real-time simulation system of hydrodynamic characteristics of the amphibious vehicle[J]. Acta Armamentarii, 2024, 45(5):1402-1415. (in Chinese)
|
| [54] |
赵彬. 基于动网格的两栖车航行特性数值模拟研究[D]. 北京: 北京理工大学, 2015.
|
|
ZHAO B. Numerical simulation for navigating characteristics of amphibious vehicles based on dynamic-mesh model[D]. Beijing: Beijing Institute of Technology, 2015. (in Chinese)
|
| [55] |
WANG Z Q, LU Q D. Wave resistance caused by a point load steadily moving on the surface of a floating viscoelastic plate[J]. Journal of Marine Science and Engineering, 2023, 11(9):1681.
|
| [56] |
HEINS H P, JONES B L, TAUNTON J D. Design and validation of an unmanned surface vehicle simulation model[J]. Applied Mathematical Modelling, 2017,48:749-774.
|
| [57] |
GAO X, XU L Y, XU H J, et al.Traction performance and dynamic matching analysis of wheel-track composite amphibious vehicle[C]//Proceedings of 2022 International Conference on Autonomous Unmanned Systems(ICAUS 2022). Singapore:Springer,2023:1591-1599.
|
| [58] |
王野, 陈慧岩, 汪泰霖, 等. 矢量喷水推进两栖车航行姿态的数值及试验分析[J]. 兵工学报, 2022, 43(12):3172-3185.
|
|
WANG Y, CHEN H Y, WANG T L, et al. Numerical and experimental analysis on the navigation attitude of vector waterjet propelled amphibian vehicles[J]. Acta Armamentarii, 2022, 43(12):3172-3185. (in Chinese)
doi: 10.12382/bgxb.2021.0872
|
| [59] |
LI J J, CARRICA P M. An approach to couple velocity/pressure/void fraction in two-phase flows with incompressible liquid and compressible bubbles[J]. International Journal of Multiphase Flow, 2018,102:77-94.
|
| [60] |
BEHARA S, ARNOLD A, MARTIN J E, et al. Experimental and computational study of operation of an amphibious craft in calm water[J]. Ocean Engineering, 2020,209:107460.
|
| [61] |
YAMASHITA H, ARNOLD A, CARRICA P M, et al. Coupled multibody dynamics and computational fluid dynamics approach for amphibious vehicles in the surf zone[J]. Ocean Engineering, 2022,257:111607.
|
| [62] |
XU X J, LIU B L, PAN D B. Influence of towing position on hydrodynamic characteristics of an amphibious tractor[J]. Ocean Engineering, 2023,272:113932.
|
| [63] |
XU L Y, GAO X, TANG Y J, et al.Optimization and design of walking mechanism system for amphibious unmanned platform[C]//Proceedings of 2022 International Conference on Autonomous Unmanned Systems (ICAUS 2022). Singapore:Springer,2023:2178-2185.
|
| [64] |
XU H J, XU L Y, FENG Y K, et al. Influence of a walking mechanism on the hydrodynamic performance of a high-speed wheeled amphibious vehicle[J]. Mechanical Sciences, 2023, 14(2):277-292.
|
| [65] |
DU Z F, MU X L, ZHU H M, et al. Identification of critical parameters influencing resistance performance of amphibious vehicles based on a SM-SA method[J]. Ocean Engineering, 2022,258:111770.
|
| [66] |
SUN C L, XU X J, ZOU T A. Investigation on trim control of semi-planing amphibious cargo truck using experimental and numerical approaches[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2021, 236(3):1322-1333.
|
| [67] |
陈思忠, 吴志成, 杨林, 等. 轮式两栖军车高航速技术探讨[J]. 车辆与动力技术, 2009(2):61-64.
|
|
CHEN S Z, WU Z C, YANG L, et al. Survey of the technology for advancing aquatic-speed of wheeled amphibian military vehicle[J]. Vehicle & Power Technology, 2009(2):61-64. (in Chinese)
|
| [68] |
徐海军, 徐小军, 徐藜洋, 等. 基于构型创新的水陆两栖无人平台减阻增速技术[J]. 中国科学:技术科学, 2023, 53(8):1272-1283.
|
|
XU H J, XU X J, XU L Y, et al. Sailing resistance reduction and speed raising for amphibious vehicles using novel configuration[J]. SCIENTIA SINICA Technologica, 2023, 53(8):1272-1283. (in Chinese)
|
| [69] |
LIU B L, XU X J, PAN D B. Influence of resistance due to locomotion mechanism configurations of a new high-speed amphibious vehicle (HSAV-Ⅱ)[J]. Ocean Engineering, 2023,283:115175.
|
| [70] |
李芳. 仿鲨鱼鳃呼吸过程的流场控制及减阻性能研究[D]. 哈尔滨: 哈尔滨工程大学, 2016.
|
|
LI F. Flow field control and drag reduction performance study of bionic shark’s breathing process[D]. Harbin: Harbin Engineering University, 2016. (in Chinese)
|
| [71] |
PAN D B, XU X J, LIU B L, et al. A review on drag reduction technology:focusing on amphibious vehicles[J]. Ocean Engineering, 2023,280:114618.
|
| [72] |
剧冬梅, 项昌乐, 陶溢, 等. 电驱动差速转向轮式水陆两栖车辆可收放悬架机构运动学分析与参数优化[J]. 兵工学报, 2019, 40(8):1580-1586.
doi: 10.3969/j.issn.1000-1093.2019.08.004
|
|
JU D M, XIANG C L, TAO Y, et al. Kinematic analysis and optimization of key parameters of suspension for electric differential steering wheeled amphibious vehicle[J]. Acta Armamentarii, 2019, 40(8):1580-1586. (in Chinese)
|
| [73] |
余飞. 带有潜水功能的水陆两栖快艇总体设计及其关键技术研究[D]. 镇江: 江苏科技大学, 2015.
|
|
YU F. A Study on the general design of amphibious speedboat with diving function and its key technologies[D]. Zhenjiang: Jiangsu University of Science and Technology, 2015. (in Chinese)
|
| [74] |
王少新, 王涵, 金国庆, 等. 水陆两栖车水动力性能与防浪板受力特性研究[J]. 兵器装备工程学报, 2020, 41(1):1-6.
|
|
WANG S X, WANG H, JING G Q, et al. Study on hydrodynamic performance of amphibious vehicle and mechanical characteristics of wave board[J]. Journal of Ordnance Equipment Engineering, 2020, 41(1):1-6. (in Chinese)
|
| [75] |
LEE T I, LEE J J, NAM W K, et al. Hydrodynamic characteristics of a hydrofoil-assisted amphibious vehicle[J]. Journal of Ship Research, 2017, 61(1):15-22.
|
| [76] |
刘雪言. 两栖火炮伸缩收放水翼技术研究[D]. 太原: 中北大学, 2017.
|
|
LIU X Y. Research on technology of amphibious gun with retractable hydrofoils[D]. Taiyuan: North University of China, 2017. (in Chinese)
|
| [77] |
LIU B L, PAN D B, XU X J. Research on the resistance and maneuvering characteristics of an amphibious transport vehicle and the influence of stern hydrofoil[J]. Ocean Engineering, 2024,293:116592.
|
| [78] |
LIU B L, XU X J, PAN D B. Resistance reduction optimization of an amphibious transport vehicle[J]. Ocean Engineering, 2023,280:114854.
|
| [79] |
LIU B L, XU X J, PAN D B, et al. Research on shipping energy-saving technology:hydrofoil amphibious vehicle driven by waterjet propulsion[J]. Journal of Cleaner Production, 2023,382:135257.
|
| [80] |
白钧宇. 无人船主动水翼控制策略研究[D]. 大连: 大连理工大学, 2023.
|
|
BAI J Y. Investigation of active hydrofoil control strategies on autonomous ship[D]. Dalian: Dalian University of Technology, 2023. (in Chinese)
|
| [81] |
彭锟. 基于代理模型的两栖车辆外形减阻优化方法研究[D]. 北京: 北京理工大学, 2015.
|
|
PENG K. Surrogate based optimization of resistance reductionof the amphibious vehicle[D]. Beijing: Beijing Institute of Technology, 2015. (in Chinese)
|
| [82] |
孙承亮, 徐小军, 唐源江, 等. 分段履带式水陆两栖车减阻增速试验及数值仿真[J]. 国防科技大学学报, 2022, 44(5):201-208.
|
|
SUN C L, XUN X J, TANG Y J, et al. Experimental and numerical simulation of reducing resistance and increasing speed for a segmented-track amphibious vehicle[J]. Journal of National University of Defense Technology, 2022, 44(5):201-208. (in Chinese)
|
| [83] |
DU Z F, MU X L, ZHU H M, et al. Numerical investigation on the inhibition of porpoising instability for high-speed amphibious vehicles[J]. Ships and Offshore Structures, 2024, 19(11):1855-1867.
|
| [84] |
LUO H, DING J M, JIANG J B, et al. Resistance characteristics and improvement of a pump-jet propelled wheeled amphibious vehicle[J]. Journal of Marine Science and Engineering, 2022, 10(8):1092.
|
| [85] |
LIU B L, XU X J, PAN D B, et al. Drag reduction design and research of high-speed amphibious vehicle’s deformable track wheels[J]. Ships and Offshore Structures, 2023, 18(7):970-979.
|
| [86] |
雷建宇, 潘玉田, 马新谋. 两栖车辆水上推进装置的研究[J]. 机械管理开发, 2005(2):3-4,6.
|
|
LEI J Y, PAN Y T, MA X M. Research on water propulsion device of amphibious vehicle[J]. Mechanical Management and Development, 2005(2):3-4,6. (in Chinese)
|
| [87] |
张声涛, 胡海昆. 漫谈两栖车辆水上推进方式[J]. 兵器知识, 2006(3):67-69.
|
|
ZHANG S T, HU H K. Discussion on amphibious vehicle water propulsion mode[J]. Ordnance Knowledge, 2006(3):67-69. (in Chinese)
|
| [88] |
VILLACRÉS J, BARCZYK M, LIPSETT M. Literature review on archimedean screw propulsion for off-road vehicles[J]. Journal of Terramechanics, 2023,108:47-57.
|
| [89] |
JEONG J H, YI C S, LEE C W. Development of a small floating outboard type water-jet propulsion system[J]. Journal of the Korean Society of Manufacturing Technology Engineers, 2016, 25(1):42-47.
|
| [90] |
STRICKER J G, BECNEL A J, PURNELL J G. Advanced waterjet systems[J]. Naval Engineers Journal, 1994, 106(5):100-109.
|
| [91] |
CHUN H H, AHN B H, CHA S M. Self-propulsion test and analysis of an amphibious tracked vehicle with waterjet[C]//Proceeding of World Maritime Technology Conference and SNAME Annual Meeting.San Francisco,CA, US:SNAME, 2003:D6(D-133).
|
| [92] |
田伟鹏, 潘玉田, 马新谋. 喷水推进系统在两栖战斗车辆上的研究与应用[J]. 机械管理开发, 2006(5):21-22,24.
|
|
TIAN W P, PAN Y T, MA X M. Research and application of water propulsion system of amphibious vehicle[J]. Mechanical Management and Development, 2006(5):21-22,24. (in Chinese)
|
| [93] |
徐国英, 薛劲橹. 两栖车辆在波浪中航行时的摇荡分析及解决方法[J]. 兵工学报, 2010, 31(5):541-546.
|
|
XU G Y, XUE J L. Analysis and solution of amphibious vehicle’s toss motion in wave[J]. Acta Armamentarii, 2010, 31(5):541-546. (in Chinese)
|
| [94] |
SOPEGNO L, LIVRERI P, STEFANOVIC M, et al. Thrust vector controller comparison for a finless rocket[J]. Machines, 2023, 11(3):394.
|
| [95] |
KADIYAM J, MOHAN S, DESHMUKH D, et al. Simulation-based semi-empirical comparative study of fixed and vectored thruster configurations for an underwater vehicle[J]. Ocean Engineering, 2021, 234(5):109231.
|
| [96] |
LOGHIS E K, XIROS N I. Development of discrete-time waterjet control systems used in surface vehicle thrust vectoring[J]. Journal of Marine Science and Engineering, 2022, 10(12):1844.
|
| [97] |
JIANG J B, DING J M, WANG X D. A vector control technology of waterjet propelled crafts using synchronous and mirror-equiangular thrust control strategy[J]. Ocean Engineering, 2020, 207(1):107358.
|
| [98] |
武建国, 王昌强, 王晓鸣, 等. “十”字形矢量推进系统的设计[J]. 船舶工程, 2018, 40(11):100-106.
|
|
WU J G, WANG C Q, WANG X M, et al. Design of cruciform vector propulsion system[J]. Ship Engineering, 2018, 40(11):100-106. (in Chinese)
|
| [99] |
LIN X C, GUO S X, YUE C F, et al. 3D modelling of a vectored water jet-based multi-propeller propulsion system for a spherical underwater robot[J]. International Journal of Advanced Robotic Systems, 2013, 10(1):51537.
|
| [100] |
TANVEER A, AHMAD S.M. Mathematical modelling and fluidic thrust vectoring control of a delta wing UAV[J]. Aerospace, 2023, 10(6):563.
|
| [101] |
GENG L B, HU Z Q. Underwater thrust vectoring based on inflated surface[J]. Journal of Marine Engineering Technology, 2020, 19(1):15-23.
|
| [102] |
PERUMAL A K, ZHOU Y. Parametric study and scaling of jet manipulation using an unsteady minijet[J]. Journal of Fluid Mechanics, 2018,848:592-630.
|
| [103] |
DESAL M, HALDER A, BENEDICT M, et al. A control scheme for 360°thrust vectoring of cycloidal propellers with forward speed[J]. Ocean Engineering, 2022,249:110833.
|
| [104] |
XIA H, WANG P, DONG H C, et al. Hydrodynamic characteristics of a new thrust vectoring ducted propeller with slotted nozzle[J]. Ocean Engineering, 2022,266:112805.
|
| [105] |
XIA H, WANG P, JIN Z H, et al. Maneuverability analysis of thrust vectoring ducted propeller with deflector[J]. Ocean Engineering, 2020,213:107614.
|
| [106] |
ZHANG Z T, CAO S P, SHI W J, et al. High pressure waterjet propulsion with thrust vector control system applied on underwater vehicles[J]. Ocean Engineering, 2018,156:456-467.
|
| [107] |
LIU T, HU Y L, XU H, et al. Investigation of the vectored thruster AUVs based on 3SPS-S parallel manipulator[J]. Applied Ocean Research, 2019,85:151-161.
|
| [108] |
汪泰霖, 王野, 张富毅, 等. 水陆两栖车矢量喷口装置设计与仿真[J]. 兵工学报, 2022, 43(4):826-850.
doi: 10.12382/bgxb.2020.0739
|
|
WANG T L, WANG Y, ZHANG F Y, et al. Design and simulation of vector nozzle on amphibious vehicle[J]. Acta Armamentarii, 2022, 43(4):826-850. (in Chinese)
doi: 10.12382/bgxb.2020.0739
|
| [109] |
孙旭光, 邱思聪. 两栖车辆发展——水上推进技术的需求与应用[J]. 船舶, 2023, 34 (6):22-27.
|
|
SUN X G, QIU S C. Development of amphibious vehicles. requirements and applications of surface vehicle propulsion technology[J]. Ship & Boat, 2023, 34 (6):22-27. (in Chinese)
|
| [110] |
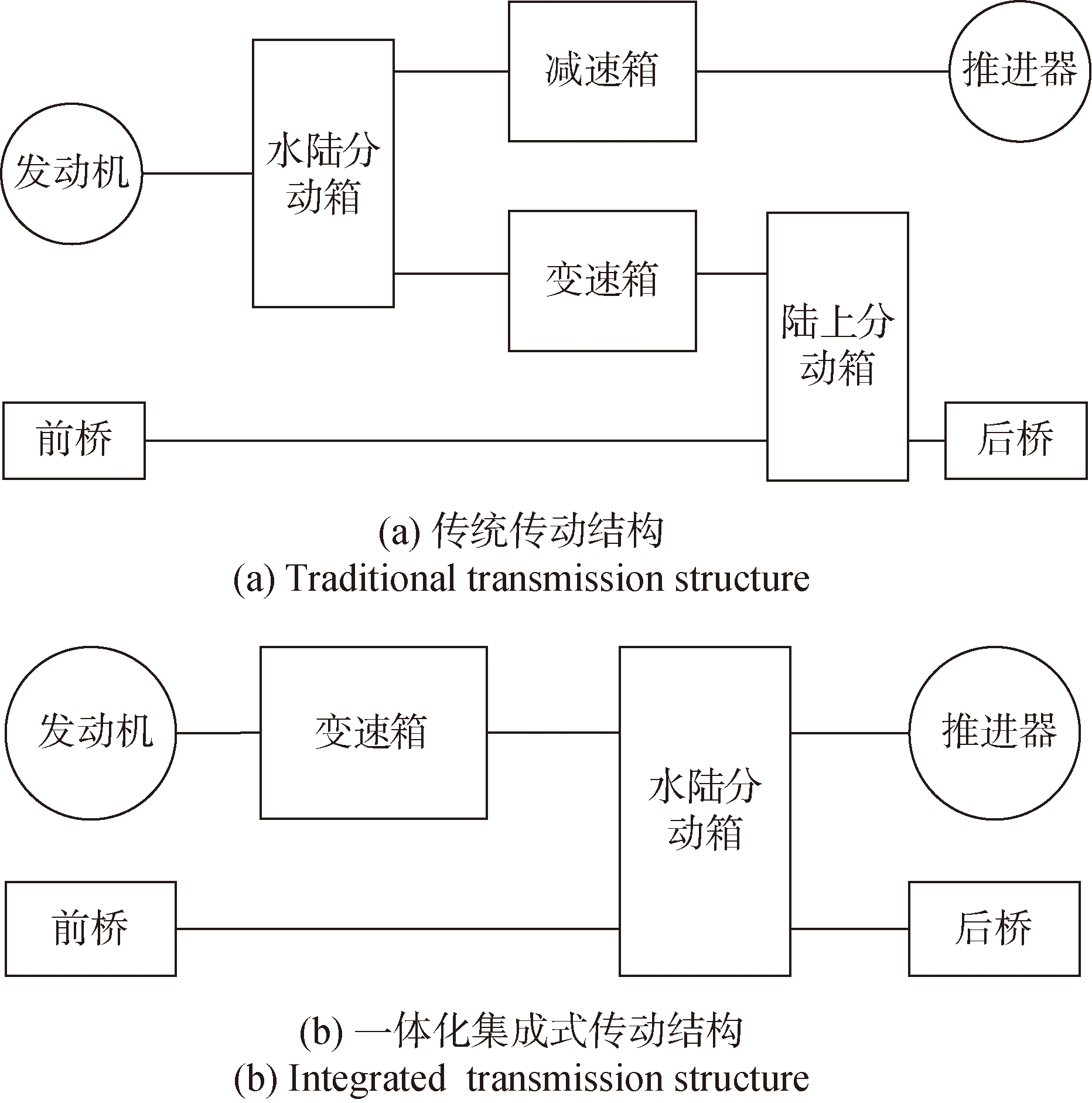
蒋旭东, 胡琦, 钟琳, 等. 水陆两栖救援艇多流集成式传动构型设计[C]// 2023中国消防协会科学技术年会. 厦门: 应急管理出版社,2023:5.
|
|
JIANG X D, HU Q, ZHONG L, et al. Multi-stream integrated transmission configuration design of amphibious rescue boat[C]// Proceedings of 2023 China Fire Protection Association Science and Technology Annual Meeting.Xiamen, China: Emergency Management Press,2023:5. (in Chinese)
|
| [111] |
黄燕滨, 周科可, 巴国召, 等. 沿海两栖车辆腐蚀现状及腐蚀综合控制技术[J]. 兵工学报, 2016, 37(7):1291-1298.
doi: 10.3969/j.issn.1000-1093.2016.07.018
|
|
HUANG Y B, ZHOU K K, BA G Z, et al. The corrosion status of amphibious vehicles along the coast and integrated corrosion control technology[J]. Acta Armamentarii, 2016, 37(7):1291-1298. (in Chinese)
|
| [112] |
刘晋现, 丁政, 赵维红. R6660罗利冈轮边减速器密封失效的原因分析及改造[J]. 物探装备, 2007(3):199-201.
|
|
LIU J X, DING Z, ZHAO W H. Analysis of reason of seal invalidation in R6660 ROLLlGON planetary wheel outer ends and reformation[J]. Equipment for Geophysical Prospecting, 2007(3):199-201. (in Chinese)
|
| [113] |
陈宇, 薛涛, 肖洁, 等. 一种冷却风扇液压驱动系统设计与性能验证[J]. 机械工程师, 2023(9):150-153.
|
|
CHEN Y, XUE T, XIAO J, et al. Design and performance verification of a hydraulic drive system for cooling fan[J]. Mechanical Engineer, 2023(9):150-153. (in Chinese)
|
| [114] |
赵朋昭, 王佑君, 姚凯. 轮式两栖车静压传动系统分析与设计[J]. 液压与气动, 2013(7):20-24.
doi: 10.11832/j.issn.1000-4858.2013.07.006
|
|
ZHAO P Z, WANG Y J, YAO K. Analysis and design of hydrostatic transmission systemin wheel amphibious vehicle[J]. Chinese Hydraulics & Pneumatics, 2013(7):20-24. (in Chinese)
|
| [115] |
康忠, 张睿妍, 张孟杰, 等. 两栖车辆发动机辅助系统研究[J]. 车辆与动力技术, 2023(4):15-21.
|
|
KANG Z, ZHANG R Y, ZHANG M J, et al. Research on engine auxiliary system of amphibious vehicle[J]. Vehicle & Power Technology, 2023(4):15-21. (in Chinese)
|
| [116] |
李威. 两栖车辆水下热管散热系统仿真研究与分析[D]. 广州: 华南理工大学, 2022.
|
|
LI W. Simulation research and analysis on underwater heat pipe heat dissipation system of amphibious vehicle[D]. Guangzhou: South China University of Technology, 2022. (in Chinese)
|
| [117] |
唐海欧. 游艇搬运车电液驱动系统设计及节能匹配研究[D]. 秦皇岛: 燕山大学, 2022.
|
|
TANG H O. Design of electro-hydraulic drive system for yacht truck and energy-saving matching research[D]. Qinhuangdao: Yanshan University, 2022. (in Chinese)
|
| [118] |
周霜霜. 水陆两栖装甲车分动器齿轮传动动力学分析[D]. 沈阳: 沈阳理工大学, 2017.
|
|
ZHOU S S. Dynamics analysis of transfer case transmission on an amphibious armored vehicle[D]. Shenyang: Shenyang Ligong University, 2017. (in Chinese)
|
| [119] |
骆承良, 黄英, 王绪, 等. 混合动力水陆两栖车辆动力系统参数匹配研究[C]// 内燃动力碳中和与排放控制学术年会. 长沙: 中国内燃机学会,2022:157.
|
|
LUO C L, HUANG Y, WANG X, et al. Research on parameter matching of hybrid eleetricamphibious vehicle power system[C]// Proceedings of Symposium on Carbon Neutral and Emission Control for Internal Combustion Engines. Changsha: Chinese Society for Internal Combustion Engines,2022:157. (in Chinese)
|
| [120] |
林强. 一种水陆两栖车的增程式动力系统设计与仿真[D]. 长沙: 国防科技大学, 2018.
|
|
LIN Q. Design and simulation of an extended-range dynamic system for an amphibious vehicle[D]. Changsha: National University of Defense Technology, 2018. (in Chinese)
|
| [121] |
BAINES R, FISH F, BOTTIGLIO R K. Amphibious robotic propulsive mechanisms:current technologies and open challenges[M]// PALEY D A,WERELEY N M.Bioinspired Sensing,Actuation,and Control in Underwater Soft Robotic Systems. Cham, Switzerland:Springer,2020:41-69.
|
| [122] |
ZHANG X K, ZHANG G Q. Design of ship course-keeping autopilot using a sine function-based nonlinear feedback technique[J]. The Johnal of Navigation, 2016, 69(2):246-256.
|
| [123] |
ALVAREZ J L. Nonlinear control of an unmanned amphibious vehicle[D]. Boca Raton,FL, US: Florida Atlantic University, 2013.
|
| [124] |
LIU Z Q. Ship adaptive course keeping control with nonlinear disturbance observer[J]. IEEE Access, 2017, 5(99):17567-17575.
|
| [125] |
LIU Z Q, GU W, GAO D J. Ship course keeping using eigenvalue decomposition the adaptive sliding Mode control[C]// Proceedings of 2016 Techno-Ocean.Kobe, Japan:IEEE,2017:687-691.
|
| [126] |
ZHANG K, QIAO W M, LI T S, et al. Dynamic surface sliding mode algorithm based on approximation for course-keeping control of ship[C]// Proceedings of the 2016 3rd International Conference on Informative and Cybernetics for Computational Social Systems.Jinzhou, China:IEEE,2016:170-174.
|
| [127] |
ZHANG G Q, ZHANG X K. A novel DVS guidance principle and robust adaptive path-following control for underactuated ships using low frequency gain-learning[J]. Isa Transactions, 2015,56:75-85.
|
| [128] |
ZHENG Y G, LIU S N. Design of digital brake control system for the navigating of amphibious armored vehicles[J]. Journal of Coastal Research, 2018, 83(sp1):526-530.
|
| [129] |
褚丽娜. 混合粒子群优化算法求解船队规划非线性模型研究[J]. 舰船科学技术, 2017, 39(4):67-69.
|
|
CHU L N. Research on solving the nonlinear model for ships planning based on hybrid particle swarm optimization algorithm[J]. Ship Science and Technology, 2017, 39(4):67-69. (in Chinese)
|
| [130] |
SHABAROV V, PEPLIN F, KALYASOV P, et al. Analytical and numerical investigation of the lift system stability of the air cushion vehicle fitted with closed inflated side seals[J]. Applied Ocean Research, 2022,120:103045.
|
| [131] |
任帅. 固定双桨推进无人船的自抗扰运动控制研究[D]. 大连: 大连海事大学, 2019.
|
|
REN S. Research on active disturbance rejection motion control for usv driven by fixed two propellers[D]. Dalian: Dalian Maritime University, 2019. (in Chinese)
|
| [132] |
王驰明, 肖晶晶, 姚恺涵, 等. 新型零航速矢量减摇系统研究[J]. 舰船科学技术, 2020, 42(7):75-80.
|
|
WANG C M, XIAO J J, YAO K H, et al. Research of a novel zero-speed vector anti-rolling system[J]. Ship Science and Technology, 2020, 42(7):75-80. (in Chinese)
|
| [133] |
中国船舶工业集团公司. 船舶设计实用手册 (总体分册)[M]. 北京: 国防工业出版社, 2013.
|
|
China State Shipbuilding Corporation Limited. Practical manual for ship design (general volume)[M]. Beijing: National Defence Industry Press, 2013. (in Chinese)
|
| [134] |
FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. Chichester, UK: John Wiley & Sons, 2011.
|
| [135] |
王宇. 系泊状态船舶横摇减摇装置与系统[M]. 沈阳: 辽宁科学技术出版社, 2013.
|
|
WANG Y. Ship rolling anti-rolling device and system in mooring state[M]. Shenyang: Liaoning Publishing Group, 2013. (in Chinese)
|
| [136] |
GIALLANZA A, ELMS T. Interactive roll stabilization comparative analysis for large yacht:gyroscope versus active fins[J]. International Journal on Interactive Design and Manufacturing, 2020, 14(10):143-151.
|
| [137] |
SONG J G, ZHAO P, LIANG L H, et al. Force modeling of zero/low-velocity fin stabilizer and hydrofoil profile optimization[J]. Ocean Engineering, 2020,213:107635.
|
| [138] |
闫棚. 船用陀螺仪减摇性能的分析与研究[D]. 镇江: 江苏科技大学, 2018.
|
|
YAN P. Analysis and research on anti-rolling performance of marine gyro[D]. Zhenjiang: Jiangsu University of Science and Technology, 2018. (in Chinese)
|
| [139] |
KALYASOV P S, FEVRALSKIKH A V, SHABAROV V V. Mathematical modeling of aerohydrodynamic of amphibious air-cushion vehicle with aerodynamic unloading on cushion regime[J]. Prikladnye Problemy Prochnosti I Plastichnosti, 2014, 76(3):263-268.
|
| [140] |
MATVEEV K I. Optimal static characteristics of amphibious PAR vehicles[J]. Journal of Offshore Mechanics and Arctic Engineering, 2008, 130(3):034502.
|
| [141] |
SWAFFORD M, HARWOOD C. Novel experiments on the dynamics of amphibious craft during surf zone transit[J]. Ocean Engineering, 2023, 289(1):116165.
|
| [142] |
MA X M, WANG G, LIU K X, et al. Granular resistive force theory extension for saturated wet sand ground[J]. Machines, 2022, 10(9):721.
|
| [143] |
ABDURAHMAN, HARSONO G, PRIHANTO Y, et al. Imple-mentation of support systems for determination of amphibious vehicle landing in disaster emergency response using fuzzy takagi sugeno[J]. Journal of Physics:Conference Series, 2020, 1577(1):012007.
|
| [144] |
LIU B L, XU X J, PAN D B. Research on launching,water exiting,and river crossing of an amphibious vehicle[J]. Physics of Fluids, 2023, 35(11):113328.
|
| [145] |
SAILAN K, KUHNERT K D, HARDT S. Design and control of water jet system for the amphibious autonomous vehicles[J]. International Journal of Innovative Research in Computer and Communication Engineering, 2016, 4(1):338-348.
|
| [146] |
HUANG K Q, QU G P, CHEN R H. Vehicle handling stability study based on logic threshold control method of anti-lock braking system[J]. Machine Tool and Hydraulics, 2016, 44(16):131-135.
|
| [147] |
周华钦, 赵祥君, 黄韬, 等. 美军联合轻型战术车辆作战试验研究及启示[J]. 军事交通学院学报, 2019, 21(3):54-57,76.
|
|
ZHOU H Q, ZHAO X J, HUANG T, et al. Research on operational test of US joint light tactical vehicle[J]. Journal of Military Transportation, 2019, 21(3):54-57,76. (in Chinese)
|
| [148] |
杨雨川. 基于轮履复合行驶系统的两栖车辆滩涂路面行驶性能分析[D]. 长沙: 国防科技大学, 2020.
|
|
YANG Y C. Analysis of driving performance of amphibious vehicles on beach roads based on wheel-track compound driving system[D]. Changsha: National University of Defense Technology, 2020. (in Chinese)
|
| [149] |
关畅. 自行式游艇两栖快速运输车电液调平控制系统研究[D]. 秦皇岛: 燕山大学, 2022.
|
|
GUAN C. Research on electro-hydraulic leveling control system of the high efficiency transport vehicle fortran sporting yacht[D]. Qinhuangdao: Yanshan University, 2022. (in Chinese)
|
| [150] |
靳凯迪, 柴洪洲, 宿楚涵, 等. DVL/SINS组合导航技术发展现状及趋势[J]. 导航定位学报, 2022, 10(2):1-12,92.
|
|
JIN K D, CHAI H Z, SU C H, et al. Research status and trends of DVL/SlNS integrated navigation technology[J]. Journal of Navigation and Positioning, 2022, 10(2):1-12,92. (in Chinese)
|
| [151] |
柴大帅. 多星座GNSS/INS组合导航理论与方法研究[J]. 测绘学报, 2022, 51(5):787.
doi: 10.11947/j.AGCS.2022.20200608
|
|
CHAI D S. Study on the theory and method in integrated navigation of multi-constellation GNSS/INS[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(5):787. (in Chinese)
doi: 10.11947/j.AGCS.2022.20200608
|
| [152] |
陈慧岩, 张玉. 军用地面无人机动平台技术发展综述[J]. 兵工学报, 2014, 35(10):1696-1706.
doi: 10.3969/j.issn.1000-1093.2014.10.026
|
|
CHEN H Y, ZHANG Y. An overview of research on military unmanned ground vehicles[J]. Acta Armamentarii, 2014, 35(10):1696-1706. (in Chinese)
|
| [153] |
ZHOU Y X, ZHOU L. Hybrid tightly-coupled SINS/LBL for underwater navigation system[J]. IEEE Access, 2021,12:31279-31286.
|
| [154] |
穆华, 吴志添, 吴美平. 水下地磁/惯性组合导航试验分析[J]. 中国惯性技术学报, 2013, 21(3):386-391.
|
|
MU H, WU Z T, WU M P. Experimental analysis of underwater geomagneticfield/inertial integrated navigation[J]. Journal of Chinese Inertial Technology, 2013, 21(3):386-391. (in Chinese)
|
| [155] |
李小毛, 张鑫, 王文涛, 等. 基于3D激光雷达的无人水面艇海上目标检测[J]. 上海大学学报(自然科学版), 2017, 23(1):27-36.
doi: 10.3969/j.issn.1007-2861.2016.07.022
|
|
LI X M, ZHANG X, WANG W T, et al. 3D lidar-based marine object detection for USV[J]. Journal of Shanghai University(Natural Science Edition), 2017, 23(1):27-36. (in Chinese)
doi: 10.3969/j.issn.1007-2861.2016.07.022
|
| [156] |
BANDYOPHADYAY T, SARCIONE L, HOVER F S. A simple reactive obstacle avoidance algorithm and its application in singapore harbor[J]. Springer Tracts in Advanced Robotics, 2010,62:455-465.
|
| [157] |
ZHUANG J Y, ZHANG L, ZHAO S Q, et al. Radar-based collision avoidance for unmanned surface vehicles[J]. China Ocean Engineering, 2016, 30(6):867-883.
|
| [158] |
ONUNKA C, NNADOZIE R C. Modelling the performance of USV manoeuvring and target tracking:an approach using frequency modulated continuous wave radar rotary system[J]. Springer Plus, 2013, 2(1):184.
|
| [159] |
SINISTERRA A J, DHANAK M R, ELLENRIEDER K V. Stereovision-based target tracking system for USV operations[J]. Ocean Engineering, 2017,133:197-214.
|
| [160] |
HUNTSBERGER T, AGHAZARIAN H, HOWARD A, et al. Stereo vision-based navigation for autonomous surface vessels[J]. Journal of Field Robotics, 2011, 28(1):3-18.
|
| [161] |
LANG Y M, YUAN B. Algorithm application based on the infrared image in unmanned ship target image recognition[J]. Microprocessors and Microsystems, 2021,80:103554.
|
| [162] |
SUAREZ P L, SAPPA A D, VINTIMILLA B X. Cross-spectral image dehaze through a dense stacked conditional GAN based approach[C]//Proceedings of the 2018 14th International Conference on Signal-Image Technology and Internet-Based Systems.Las Palmas de Gran Canaria, Spain:IEEE, 2018.
|
| [163] |
WANG R Q, MIAO K Y, SUN J M. Intelligent recognition method of infrared imaging target of unmanned autonomous ship based on fuzzy mathematical model[J]. Journal of Intelligent & Fuzzy Systems, 2020, 38(4):3981-3989.
|
| [164] |
HEIDARSSON H K, SUKHATME G S. Obstacle detection and avoidance for an autonomous surface vehicle using a profiling sonar[C]//Proceedings of 2011 IEEE International Conference on Robotics and Automation.Shanghai, China:IEEE, 2011.
|
| [165] |
TANG Z J, MA G Q, LU J Q, et al. Sonar image mosaic based on a new feature matching method[J]. IET Image Processing, 2020, 14(10):2149-2155.
|
| [166] |
LEEDEKERKEN J C, FALLON M F, LEONARD J J. Mapping complex marine environments with autonomous surface craft[C]// Proceedings of the 12nd International Symposium on Experimental Robotics.Berlin, Heidelberg:Springer,2014:525-539.
|
| [167] |
褚金奎, 林木音, 王寅龙, 等. 偏振光传感器的无人船导航与编队应用[J]. 光学精密工程, 2020, 28(8):1661-1669.
|
|
CHU J K, LIN M Y, WANG Y L, et al. Application of polarization sensor to unmanned surface vehicle navigation and formation[J]. Optics and Precision Engineering, 2020, 28(8):1661-1669. (in Chinese)
|
| [168] |
王国庆. 基于MEMS-IMU的USV导航系统非线性滤波方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2018.
|
|
WANG G Q. MEMS-IMU based nonlinear filtering methods research for the navigation system of USV[D]. Harbin: Harbin Engineering University, 2018. (in Chinese)
|
| [169] |
LANGELAAN J, ROCK S. Navigation of small uavs operating in forests[C]//Proceedings of AIAA Guidance,Navigation,and Control Conference.Providence,RI, US:AIAA, 2004.
|
| [170] |
姚康博. 基于视觉SLAM的无人船自主导航研究[D]. 大连: 大连海事大学, 2020.
|
|
YAO K B. Visual SLAM-based autonomous navigation of an unmanned surface vehicle[D]. Dalian: Dalian Maritime University, 2020. (in Chinese)
|
| [171] |
HAN J W, PARK J H, KIM T Y, et al. Precision navigation and mapping under bridges with an unmanned surface vehicle[J]. Autonomous Robots, 2015, 38(4):349-362.
|
| [172] |
GU N, PENG Z H, WANG D, et al. Nonlinear observer design for a robotic unmanned surface vehicle with experiment results[J]. Applied Ocean Research, 2020, 95(C):102028.
|
| [173] |
夏立新. 电子对抗中一次性使用的干扰器材[J]. 水雷战与舰船防护, 1995(2):44-47,51.
|
|
XIA L X. Disposable interference equipment in electronic countermeasures[J]. Mine Warfare & Ship Self-Defence, 1995(2):44-47,51. (in Chinese)
|
| [174] |
DIJKSTRA E W. A note on two problems in connexion with graphs[J]. Numerische Mathematik, 1959, 1(1):269-271.
|
| [175] |
PETER H E, NILS N J, RAPHAEL B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2):100-107.
|
| [176] |
STENTZ A. The focussed D* algorithm for real-time replanning[C]// Proceedings of the Fourteenth international joint conference on artificial intelligence(IJCAI-95),vol.2:Fourteenth international joint conference on artificial intelligence(IJCAI-95).Montreal,Quebec,Canada:Morgan Kaufmann Publishers,Inc.,1995:1652-1659.
|
| [177] |
SINGH Y, SHARMA S, SUTTON R, et al. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents[J]. Ocean Engineering, 2018,169:187-201.
|
| [178] |
AGHABABA M P. 3D path planning for underwater vehicles using five evolutionary optimization algorithms avoiding static and energetic obstacles[J]. Applied Ocean Research, 2012,38:48-62.
|
| [179] |
ZENG Z, SAMMUT K, LAMMAS A, et al. Efficient path re-planning for auvs operating in spatiotemporal currents[J]. Journal of Intelligent & Robotic Systems:Theory & Application, 2015, 79(1):135-153.
|
| [180] |
KIM H G, KIM D H, SHIN J U, et al. Angular rate-constrained path planning algorithm for unmanned surface vehicles[J]. Ocean Engineering, 2014,84:37-44.
|
| [181] |
KIM H, KIM S H, JEON M, et al. A study on path optimization method of an unmanned surface vehicle under environmental loads using genetic algorithm[J]. Ocean Engineering, 2017,142:616-624.
|
| [182] |
GUO S Y, ZHANG X G, ZHENG Y S, et al. An autonomous path planning model for unmanned ships based on deep reinforcement learning[J]. Sensors, 2020, 20(2):426.
|
| [183] |
WOO J, KIM N. Collision avoidance for an unmanned surface vehicle using deep reinforcement learning[J]. Ocean Engineering, 2020,199(C):107001.
|
| [184] |
薛飞. 基于无人船的路径规划与避障问题研究[D]. 哈尔滨: 哈尔滨工程大学, 2017.
|
|
XUE F. Research on path planning and obstacleavoidance based on unmanned surface vehicles[D]. Harbin: Harbin Engineering University, 2018. (in Chinese)
|
| [185] |
刘蔚, 谈果戈, 邹劲, 等. 基于快速行进平方法的水面无人船路径规划[J]. 信息与控制, 2021, 50(3):308-320.
doi: 10.13976/j.cnki.xk.2021.0325
|
|
LIU W, TAN G G, ZOU J, et al. Fast marching square method based path planning of the unmanned surface vehicle[J]. Information and Control, 2021, 50(3):308-320. (in Chinese)
doi: 10.13976/j.cnki.xk.2021.0325
|
| [186] |
YANG X F, SHI Y L, LIU W, et al. Global path planning algorithm based on double DQN for multi-tasks amphibious unmanned surface vehicle[J]. Ocean Engineering, 2022, 266(Part 1):112809.
|
| [187] |
ZHAO H, SHEN J H. Path following control of underactuated ship based on nonlinear backstepping[C]// Proceeding of 2013 IEEE International Conference on Information and Automation. Yinchuan, China:IEEE,2013:1-6.
|
| [188] |
ZHENG Z W, JIN C, ZHU M, et al. Trajectory tracking control for a marine surface vessel with asymmetric saturation actuators[J]. Robotics & Autonomous Systems, 2017,97:83-91.
|
| [189] |
ONIEVA E, NARANJO J E, MILANES V, et al. Automatic lateral control for unmanned vehicles via genetic algorithms[J]. Applied Soft Computing, 2011, 11(1):1303-1309.
|
| [190] |
DO K D. Global path-following control of stochastic underactuated ships:a level curve approach[J]. Journal of Dynamic Systems Measurement & Control, 2015, 137(7):071010.
|
| [191] |
WANG N, SU S F, YIN J C, et al. Global asymptotic model-free trajectory-independent tracking control of an uncertain marine vehicle:an adaptive universe-based fuzzy control approach[J]. IEEE Transactions on Fuzzy Systems, 2018, 26(3):1613-1625.
|
| [192] |
ZHAO Y J, QI X, INCECIK A, et al. Broken lines path following algorithm for a water-jet propulsion USV with disturbance uncertainties[J]. Ocean Engineering, 2020,201(C):107118.
|
| [193] |
SARDA E I, QU H J, BERTASKA I R, et al. Station-keeping control of an unmanned surface vehicle exposed to current and wind disturbances[J]. Ocean Engineering, 2016,127:305-324.
|
| [194] |
PANAGOU D, KYRIAKOPOULOS K J. Dynamic positioning for an underactuated marine vehicle using hybrid control[J]. International Journal of Control, 2014, 87(2):264-280.
|
| [195] |
QIU B B, WANG G F, FAN Y S. Predictor LOS-based trajectory linearization control for path following of underactuated unmanned surface vehicle with input saturation[J]. Ocean Engineering, 2020,214:107874.
|
| [196] |
WU S C, XIE L L, XIAN J. Finite-time output feedback trans-media tracking control of a slender body trans-media vehicle via neural network extended state observer[J]. Transactions of the Institute of Measurement & Control, 2024, 46(7):1397-1409.
|
| [197] |
KITAMURA F, SATO H, SHIMADA K, et al. Estimation of wind force acting on huge floating ocean structures[C]// Proceeding of OCEANS’97.MTS/IEEE Conference Proceedings.Halifax,NS, Canada:IEEE,1997:197-202.
|

 ), 于会龙
), 于会龙




 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4