
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (6): 1906-1920.doi: 10.12382/bgxb.2023.0318
朱威霖1, 姚建勇1,*( ), 刘家辉1, 黎兰2, 张佳林2
), 刘家辉1, 黎兰2, 张佳林2
收稿日期:2023-04-07
上线日期:2023-07-04
通讯作者:
基金资助:
ZHU Weilin1, YAO Jianyong1,*(), LIU Jiahui1, LI Lan2, ZHANG Jialin2
Received:2023-04-07
Online:2023-07-04
摘要:
针对泵控多连杆式起竖系统存在的非线性、模型不确定性和双缸不同步引起的力纷争问题,提出一种双缸起竖系统自抗扰力同步控制设计方法。考虑多连杆起竖机构运动学特性和闭式泵控液压系统的压力流量动态,建立多连杆式起竖系统动力学模型,通过扩张状态观测器估计系统干扰和模型不确定性,以在控制器设计过程中进行补偿,同时融合复合力同步控制方法,增强系统克服负载偏载、外干扰等引起的力纷争。基于Lyapunov理论分析证明了多连杆式双缸起竖系统的渐近跟踪和力同步性能。通过中速和快速恒功率起竖对比试验,验证所提自抗扰力同步控制策略的有效性,获得了良好的起竖跟踪和力同步控制性能。
中图分类号:
朱威霖, 姚建勇, 刘家辉, 黎兰, 张佳林. 泵控多连杆式起竖系统自抗扰力同步控制[J]. 兵工学报, 2024, 45(6): 1906-1920.
ZHU Weilin, YAO Jianyong, LIU Jiahui, LI Lan, ZHANG Jialin. Active Disturbance Rejection Force Synchronization Control for Pump-controlled Multi-link Erection System[J]. Acta Armamentarii, 2024, 45(6): 1906-1920.
图1 两种起竖方案
Fig.1 Two erection schemes
图2 多连杆起竖机构运动简图
Fig.2 Motion sketch of multi-link erection mechanism
图3 起竖载荷曲线
Fig.3 Erection force curves
图4 闭式泵控液压系统原理图
Fig.4 Schematic diagram of closed pump-controlled hydraulic system
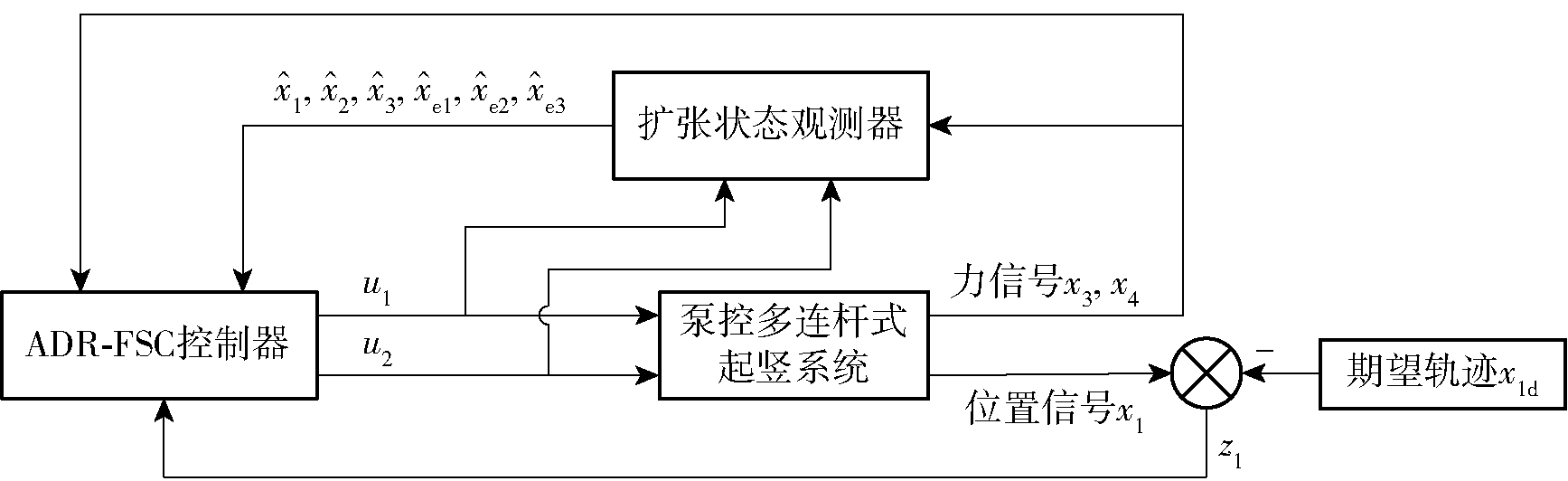
图5 泵控多连杆式起竖系统自抗扰力同步控制策略结构图
Fig.5 Schematic diagram of ADR-FSC strategy for the pump-controlled multi-link erection system

图6 多连杆式起竖试验平台
Fig.6 Experimental platform of multi-link erection system

图7 电静液作动器
Fig.7 Electro-hydrostatic actuator
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| J/(kg·m2) | 2.6×105 | V0Z/m3 | 1.075×10-4 |
| kω/(r·min-1·V-1) | 300 | V0F/m3 | 0.0283 |
| Dp/(m3·rev-1) | 1.8×10-4 | Ct/(m3·s-1·Pa-1) | 4.82×10-13 |
| A1Z/m2 | 0.0269 | Cp/(m3·s-1·Pa-1) | 2.56×10-11 |
| A1F/m2 | 0.0068 | Bf/(N·m·s·rad-1) | 80000 |
| A2Z/m2 | 0.0143 | Af/(N·m) | 3500 |
| A2F/m2 | 0.0048 | βe/Pa | 7×108 |
表1 多连杆起竖试验参数
Table 1 Parameters of multi-link erection experiment
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| J/(kg·m2) | 2.6×105 | V0Z/m3 | 1.075×10-4 |
| kω/(r·min-1·V-1) | 300 | V0F/m3 | 0.0283 |
| Dp/(m3·rev-1) | 1.8×10-4 | Ct/(m3·s-1·Pa-1) | 4.82×10-13 |
| A1Z/m2 | 0.0269 | Cp/(m3·s-1·Pa-1) | 2.56×10-11 |
| A1F/m2 | 0.0068 | Bf/(N·m·s·rad-1) | 80000 |
| A2Z/m2 | 0.0143 | Af/(N·m) | 3500 |
| A2F/m2 | 0.0048 | βe/Pa | 7×108 |
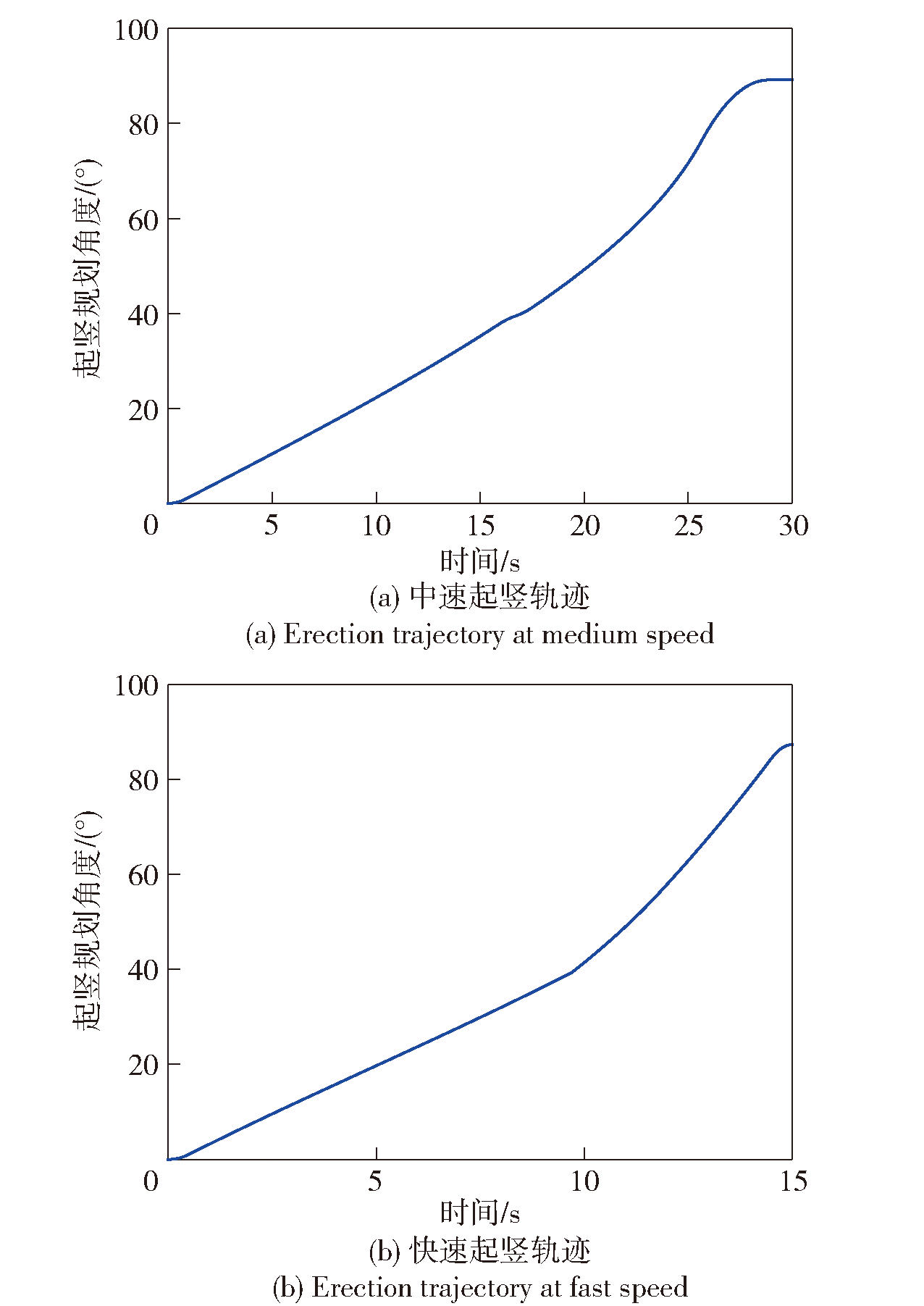
图8 起竖轨迹规划曲线
Fig.8 Desired erection trajectory

图9 工况1ADR-FSC控制器的跟踪性能
Fig.9 Tracking performance under ADR-FSC in Case 1
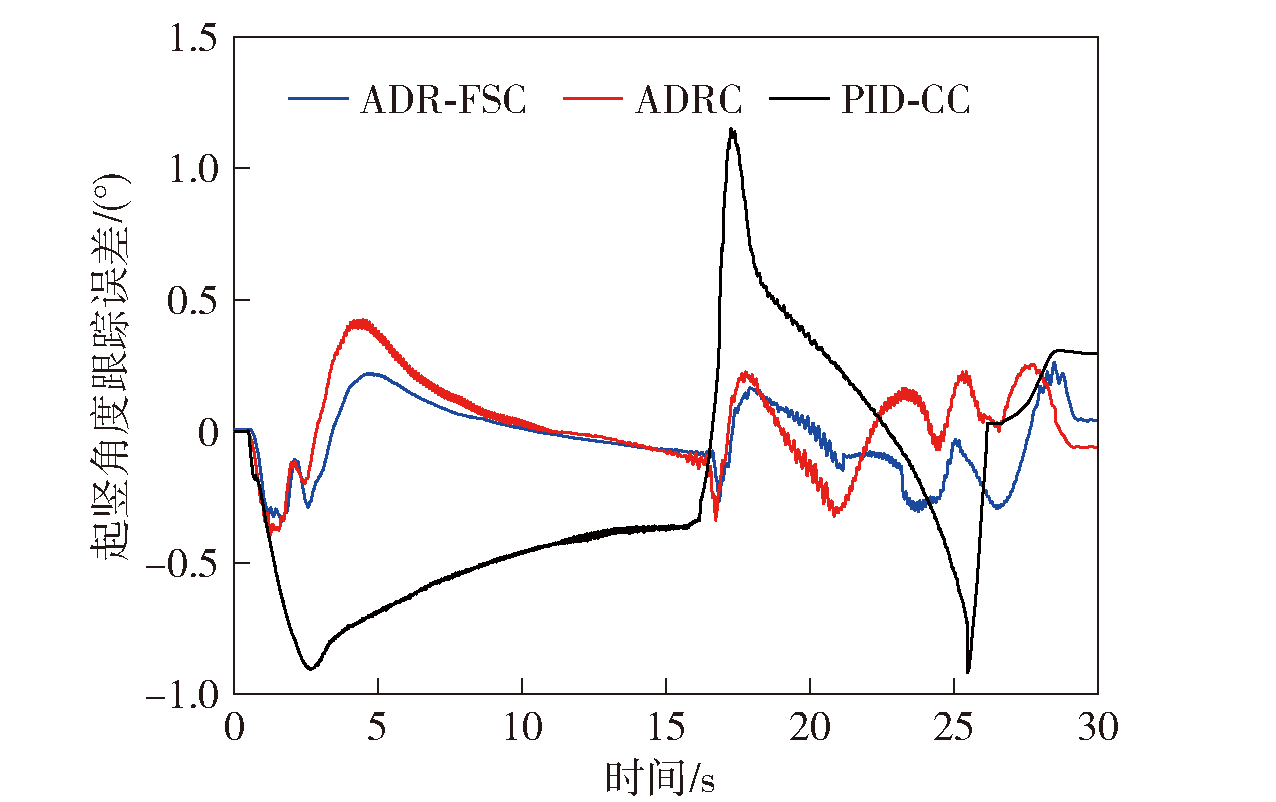
图10 工况1起竖角度跟踪误差对比
Fig.10 Comparison of tracking errors for the erection angle in Case 1
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.3144 | 0.1140 | 0.0874 |
| ADR | 0.4328 | 0.1300 | 0.1073 |
| PID-CC | 1.1519 | 0.4255 | 0.2429 |
表2 工况1起竖角度跟踪性能指标
Table 2 Performance indexes of erection angle tracking in Case 1
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.3144 | 0.1140 | 0.0874 |
| ADR | 0.4328 | 0.1300 | 0.1073 |
| PID-CC | 1.1519 | 0.4255 | 0.2429 |
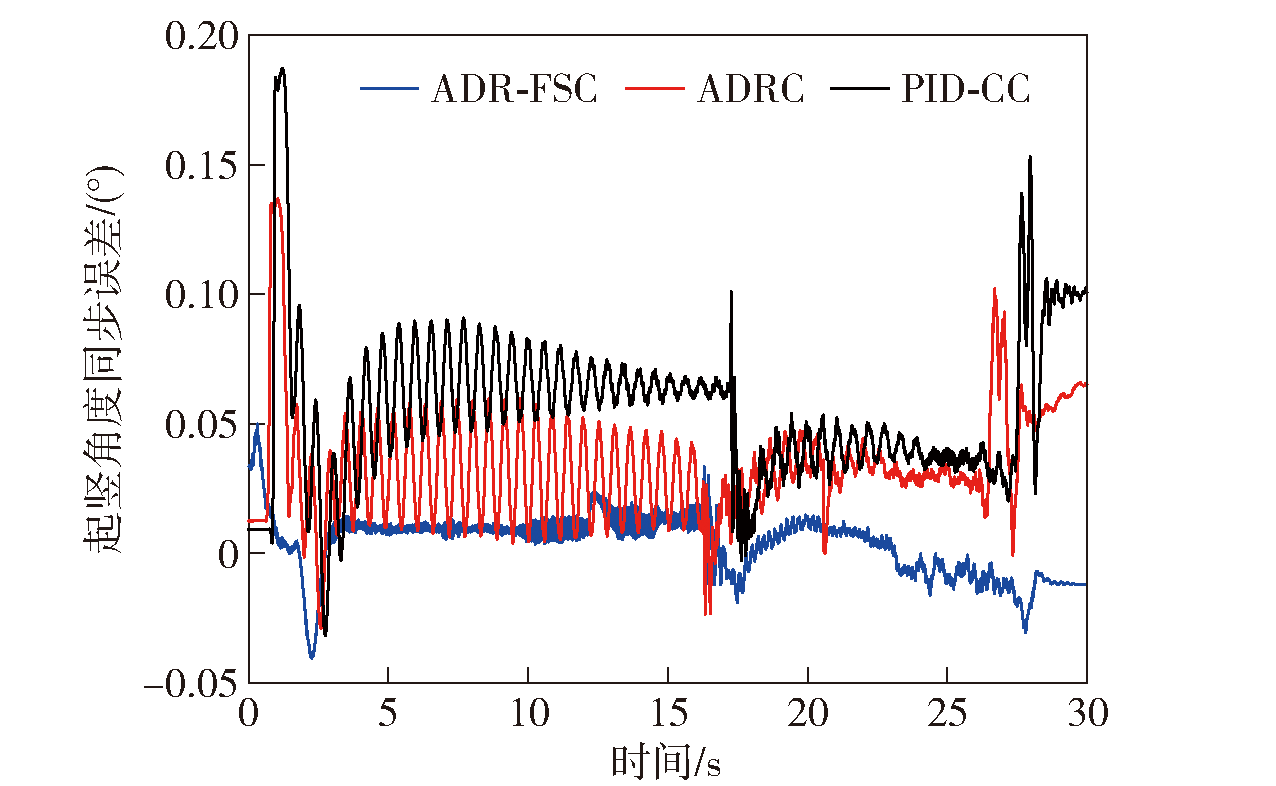
图11 工况1起竖角度同步误差对比
Fig.11 Comparison of synchronization errors for the erection angle in Case 1
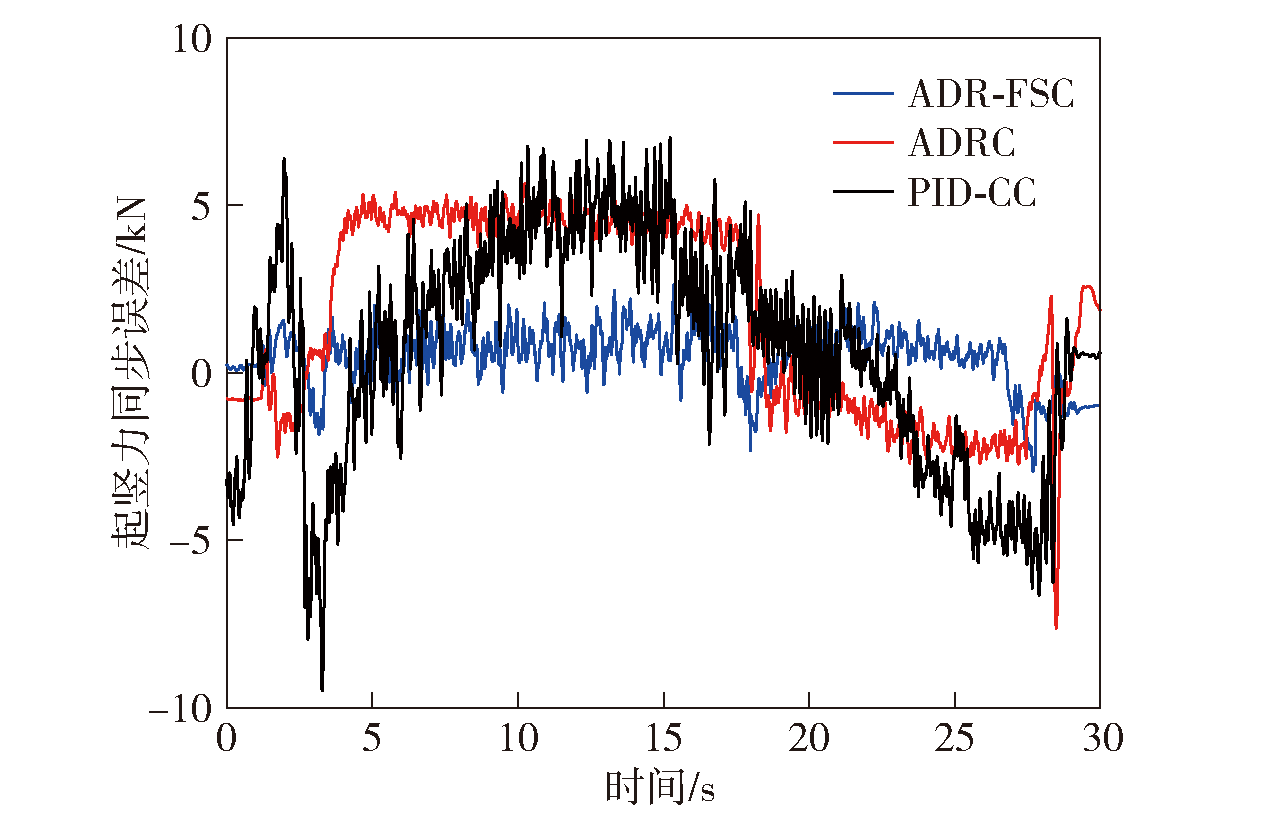
图12 工况1起竖力同步误差对比
Fig.12 Comparison of synchronization errors for the erection force in Case 1
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.0500 | 0.0107 | 0.0065 |
| ADR | 0.1369 | 0.0344 | 0.0211 |
| PID-CC | 0.1872 | 0.0559 | 0.0288 |
表3 工况1起竖角度同步性能指标
Table 3 Synchronization indexes of erection angle in Case 1
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.0500 | 0.0107 | 0.0065 |
| ADR | 0.1369 | 0.0344 | 0.0211 |
| PID-CC | 0.1872 | 0.0559 | 0.0288 |
| 控制器 | Me/N | μ/N | σ/N |
|---|---|---|---|
| ADR-FSC | 2944 | 842 | 513 |
| ADR | 7623 | 2895 | 1730 |
| PID-CC | 9495 | 3050 | 1820 |
表4 工况1起竖力同步性能指标
Table 4 Synchronization indexes of erection force in Case 1
| 控制器 | Me/N | μ/N | σ/N |
|---|---|---|---|
| ADR-FSC | 2944 | 842 | 513 |
| ADR | 7623 | 2895 | 1730 |
| PID-CC | 9495 | 3050 | 1820 |
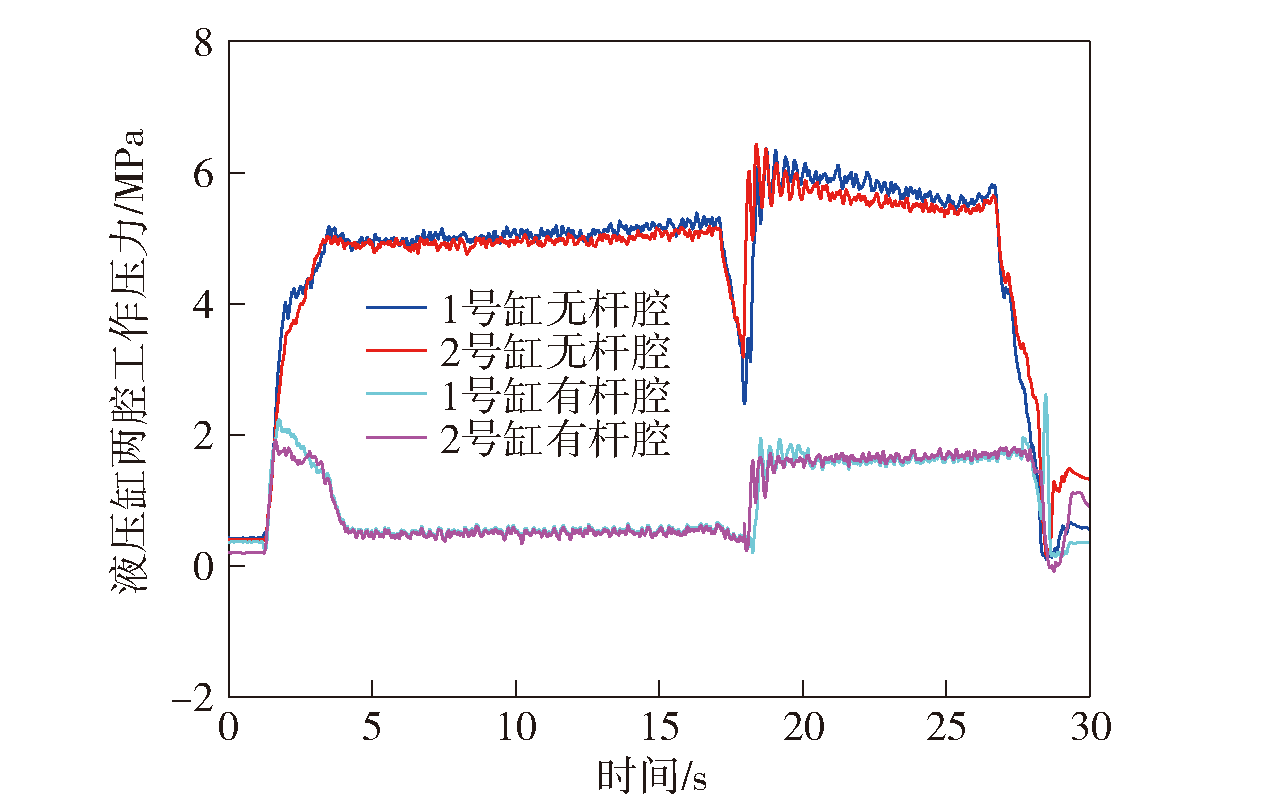
图13 工况1ADR-FSC控制器压力曲线
Fig.13 Pressure curves under ADR-FSC in Case 1
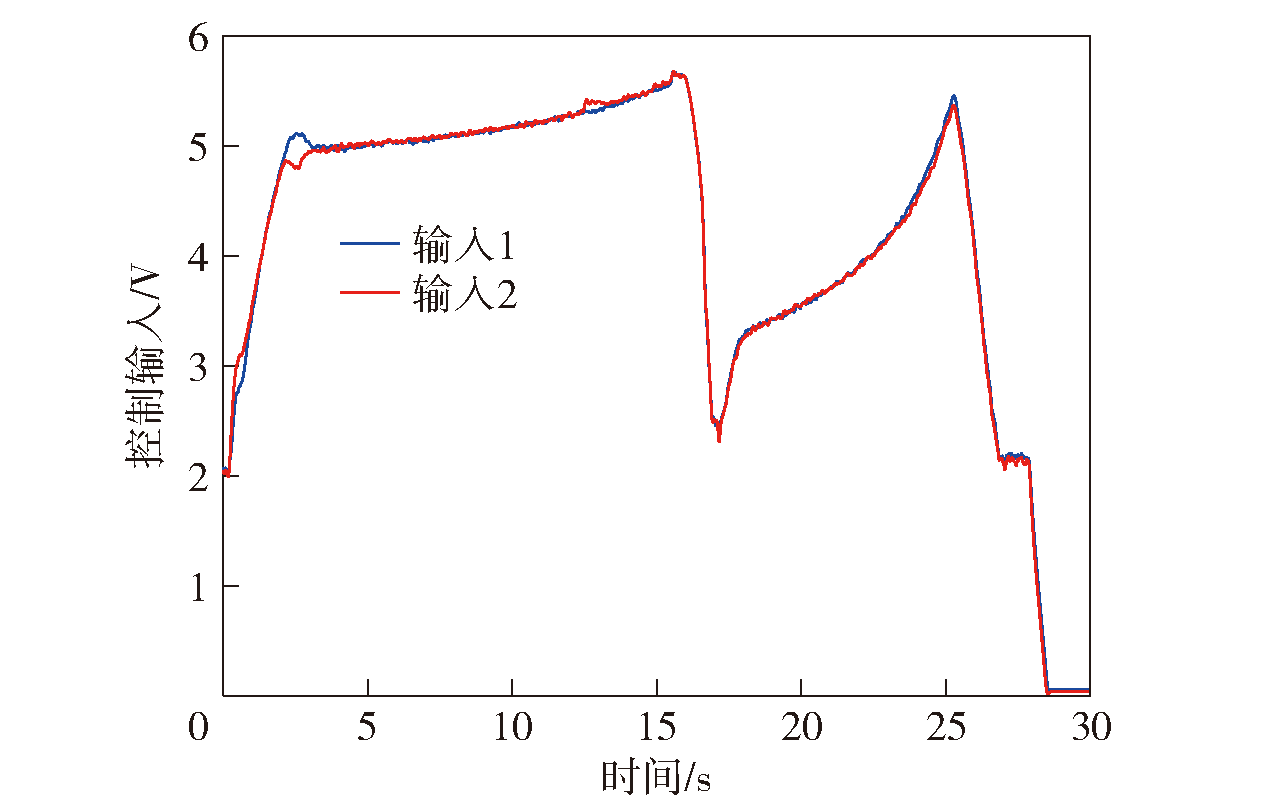
图14 工况1ADR-FSC的控制输入
Fig.14 Control inputs of ADR-FSC in Case 1
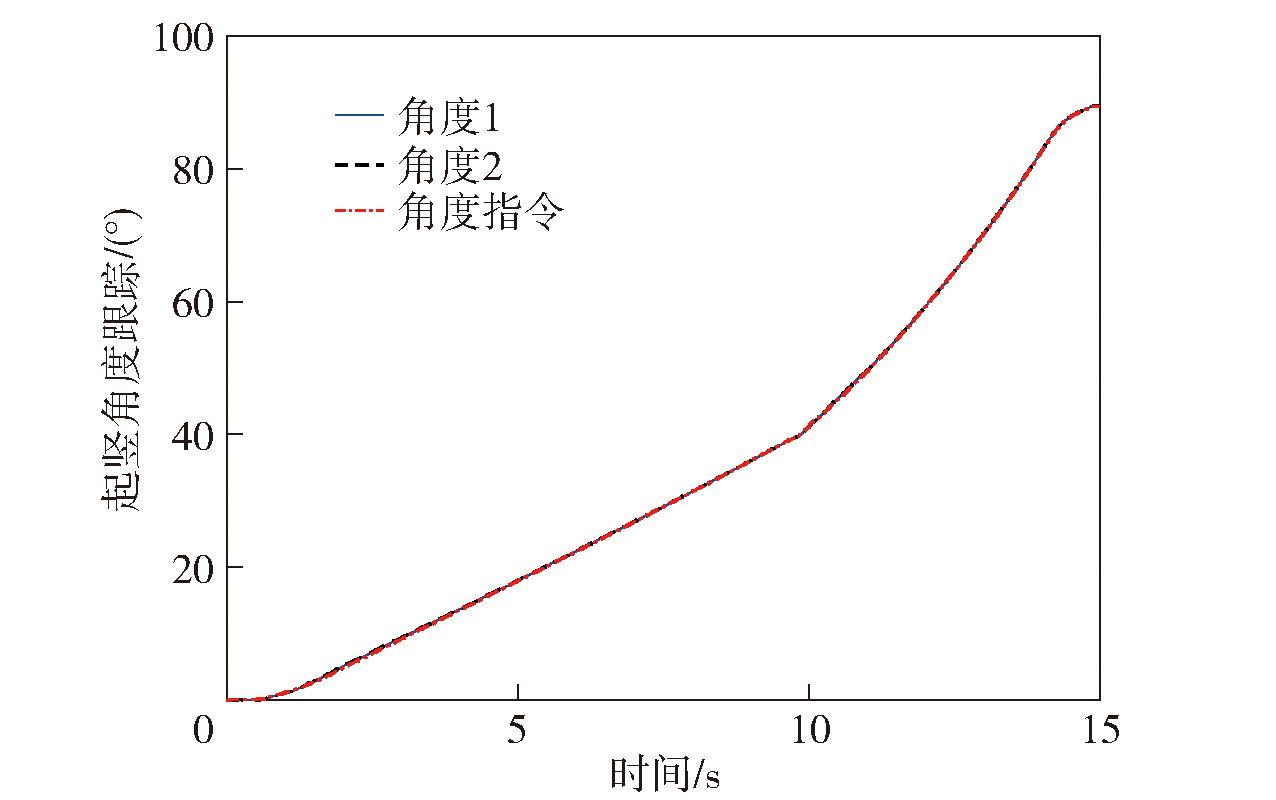
图15 工况2ADR-FSC控制器的跟踪性能
Fig.15 Tracking performance under ADR-FSC in Case 2
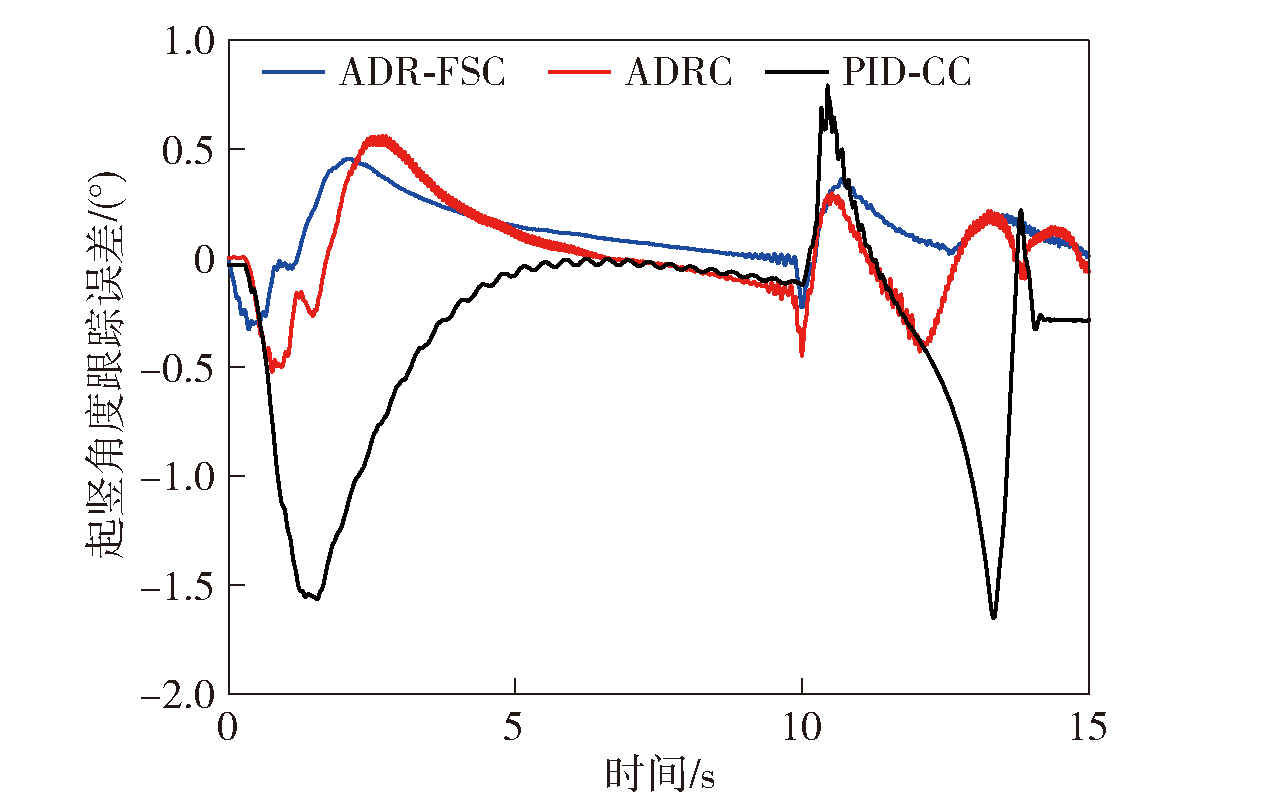
图16 工况2起竖角度跟踪误差对比
Fig.16 Comparison of tracking errors for the erection angle in Case 2
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.4573 | 0.1532 | 0.1166 |
| ADR | 0.5607 | 0.1696 | 0.1454 |
| PID-CC | 1.6514 | 0.4334 | 0.4365 |
表5 工况2起竖角度跟踪性能指标
Tab.5 Performance indexes of erection angle tracking in Case 2
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.4573 | 0.1532 | 0.1166 |
| ADR | 0.5607 | 0.1696 | 0.1454 |
| PID-CC | 1.6514 | 0.4334 | 0.4365 |
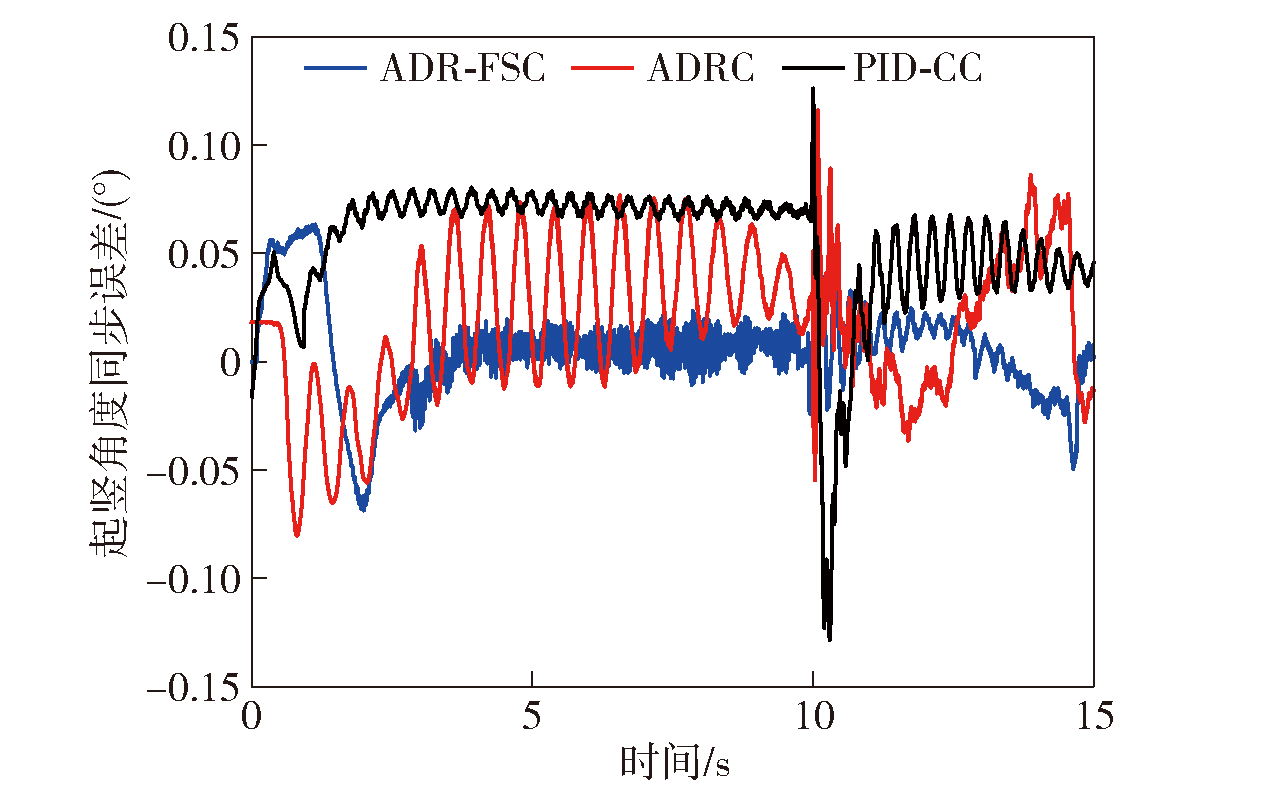
图17 工况2起竖角度同步误差对比
Fig.17 Comparison of synchronization errors for the erection angle in Case 2

图18 工况2起竖力同步误差对比
Fig.18 Comparison of synchronization errors for the erection force in Case 2
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.0687 | 0.0155 | 0.0158 |
| ADR | 0.1261 | 0.0415 | 0.0221 |
| PID-CC | 0.1385 | 0.0691 | 0.0292 |
表6 工况2起竖角度同步性能指标
Table 6 Synchronization indexes of erection angle in Case 2
| 控制器 | Me/(°) | μ/(°) | σ/(°) |
|---|---|---|---|
| ADR-FSC | 0.0687 | 0.0155 | 0.0158 |
| ADR | 0.1261 | 0.0415 | 0.0221 |
| PID-CC | 0.1385 | 0.0691 | 0.0292 |
| 控制器 | Me/N | μ/N | σ/N |
|---|---|---|---|
| ADR-FSC | 4210 | 871 | 560 |
| ADR | 6746 | 3712 | 1794 |
| PID-CC | 9262 | 3869 | 1954 |
表7 工况2起竖力同步性能指标
Table 7 Synchronization indexes of erection force in Case 2
| 控制器 | Me/N | μ/N | σ/N |
|---|---|---|---|
| ADR-FSC | 4210 | 871 | 560 |
| ADR | 6746 | 3712 | 1794 |
| PID-CC | 9262 | 3869 | 1954 |
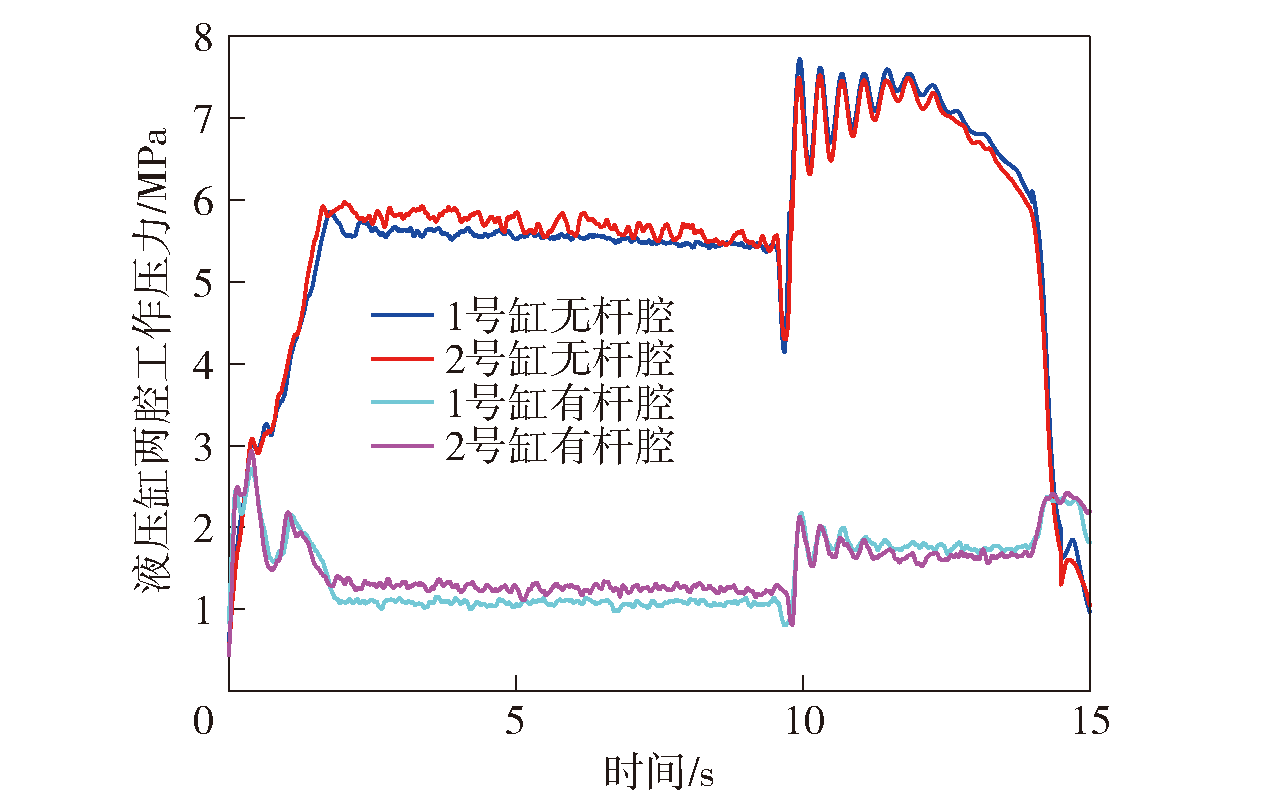
图19 工况2ADR-FSC控制器压力曲线
Fig.19 Pressure curves under ADR-FSC in Case 2
| [1] |
冯江涛, 高钦和, 邵亚军, 等. 导弹液压起竖系统流量压力复合控制策略研究[J]. 兵工学报, 2018, 39(2): 209-216.
doi: 10.3969/j.issn.1000-1093.2018.02.001 |
|
|
|
| [2] |
周伯俊, 于传强, 刘志浩, 等. 基于高压储能的特种车辆快速起竖技术与验证[J]. 兵工学报, 2022, 43(7): 1488-1497.
doi: 10.12382/bgxb.2021.0461 |
|
doi: 10.12382/bgxb.2021.0461 |
|
| [3] |
|
| [4] |
郝云晓, 夏连鹏, 权龙, 等. 闭式泵控液气储能重载举升机构特性研究[J]. 机械工程学报, 2019, 55(16): 213-219.
doi: 10.3901/JME.2019.16.213 |
|
doi: 10.3901/JME.2019.16.213 |
|
| [5] |
陈革新, 赵鹏辉, 刘小胜, 等. 电液伺服闭式泵控系统位置前馈补偿控制研究[J]. 液压与气动, 2019(12): 28-32.
doi: 10.11832/j.issn.1000-4858.2019.12.004 |
|
|
|
| [6] |
|
| [7] |
|
| [8] |
李良, 谢建, 黄建招. 动态面滑模控制在大型液压起竖系统中的应用研究[J]. 兵工学报, 2014, 35(2): 235-240.
doi: 10.3969/j.issn.1000-1093.2014.02.015 |
|
doi: 10.3969/j.issn.1000-1093.2014.02.015 |
|
| [9] |
李良, 谢建, 黄建招. 起竖系统建模及动态面自适应滑模控制[J]. 系统工程与电子技术, 2014, 36(2): 337-342.
|
|
|
|
| [10] |
杜文正, 吴鹏, 张金星, 等. 高阶滑模控制在液压起竖系统中的应用[J]. 机床与液压, 2016, 44(21): 69-73.
|
|
|
|
| [11] |
朱成, 陈谋. 应用干扰观测器的导弹发射车起竖装置鲁棒控制[J]. 应用科学学报, 2014, 32(3): 319-324.
|
|
|
|
| [12] |
杨俊, 黄书舟, 曾乐. 大型起竖装备液压系统及其鲁棒切换控制策略[J]. 中国机械工程, 2019, 30(22): 2698-2703.
|
|
|
|
| [13] |
|
| [14] |
|
| [15] |
张兵, 蒋子良, 黄华, 等. 电液双缸系统同步控制[J]. 液压与气动, 2021(2): 30-35.
doi: 10.11832/j.issn.1000-4858.2021.02.005 |
|
|
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
刘琪, 卢红, 张新宝, 等. 龙门移动式双驱进给系统定位误差补偿方法[J]. 华中科技大学学报, 2021, 49(12): 22-27.
|
|
|
|
| [20] |
王建红, 陈耀忠, 陈桂, 等. 基于交叉耦合控制的双电机同步控制系统研究[J]. 南京理工大学学报, 2017, 41(6): 693-697.
|
|
|
|
| [21] |
|
| [22] |
|
| [1] | 马悦萌, 王琳玮, 邵春涛, 周荻, 王永海. 襟翼控制的欠驱动飞行器自抗扰/鲁棒控制系统设计[J]. 兵工学报, 2023, 44(5): 1251-1266. |
| [2] | 高雨轩, 侯远龙, 高强, 侯润民. 机载光电跟踪系统的自抗扰与快速非奇异终端滑模组合控制方法[J]. 兵工学报, 2023, 44(4): 1071-1085. |
| [3] | 孙昊, 孙青林, 孙明玮, 陈增强. 随机初值条件下基于翼伞的无人机回收方法[J]. 兵工学报, 2023, 44(3): 718-727. |
| [4] | 宋金超, 赵良玉. 自旋火箭弹横滚隔离系统的自抗扰控制[J]. 兵工学报, 2022, 43(7): 1510-1518. |
| [5] | 赵春明, 焦胜海, 王晓飞, 姚跃民, 黄朝东. 柔性充气空间飞行器姿态控制系统设计[J]. 兵工学报, 2022, 43(6): 1346-1354. |
| [6] | 张文清, 邹佳运, 张小川, 韩梅, 邹司宸. 具有全向控制的水下碟形滑翔机自抗扰控制[J]. 兵工学报, 2022, 43(3): 626-636. |
| [7] | 徐秋坪, 常思江, 王中原. 滑翔制导炮弹非线性自抗扰过载控制器设计[J]. 兵工学报, 2017, 38(7): 1273-1281. |
| [8] | 李殿起, 段勇. 用跟踪微分器实现机器人自抗扰控制[J]. 兵工学报, 2016, 37(9): 1721-1729. |
| [9] | 李伟, 杨刚, 陈腾飞, 韩崇伟. 某全闭环操瞄系统的火炮身管指向控制研究[J]. 兵工学报, 2015, 36(9): 1811-1818. |
| [10] | 郑颖, 马大为, 姚建勇, 胡健. 火箭炮两轴耦合位置伺服系统线性自抗扰控制[J]. 兵工学报, 2015, 36(6): 987-993. |
| [11] | 万磊, 张英浩, 孙玉山, 李岳明, 何斌. 基于重构容错的智能水下机器人定深运动控制[J]. 兵工学报, 2015, 36(4): 723-730. |
| [12] | 万磊, 张英浩, 孙玉山, 李岳明. 基于自抗扰的自主水下航行器地形跟踪控制[J]. 兵工学报, 2015, 36(10): 1943-1948. |
| [13] | 齐晓慧, 李杰, 韩帅涛. 基于BP 神经网络的自适应自抗扰控制及仿真[J]. 兵工学报, 2013, 34(6): 776-782. |
| [14] | 胡坤, 张孝芳, 刘常波. 基于遗传算法的无人水下航行器深度自抗扰控制[J]. 兵工学报, 2013, 34(2): 217-222. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4