
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (10): 250282-.doi: 10.12382/bgxb.2025.0282
刘坤1, 冯颖2,**( ), 康宝3, 吴志林1, 宋杰1,*(), 朱韬1
), 康宝3, 吴志林1, 宋杰1,*(), 朱韬1
收稿日期:2025-04-15
上线日期:2025-11-05
通讯作者:
基金资助:
LIU Kun1, FENG Ying2,**(), KANG Bao3, WU Zhilin1, SONG Jie1,*(), ZHU Tao1
Received:2025-04-15
Online:2025-11-05
摘要: 四足无人作战平台凭借其卓越的机动性和复杂地形适应能力,在未来战争中具有重大的军事应用价值。为探究冲击载荷对四足无人作战平台振动特性和射击精度的影响,建立了无人作战平台刚柔耦合发射动力学模型,通过数值仿真分析了不同冲击载荷下枪口中心点绕x轴和z轴振幅、角位移及角速度变化规律,结合六自由度外弹道模型评估了射击散布特性,开展了有/无双向缓冲装置的无人作战平台实弹射击实验。结果表明:安装双向缓冲装置后,5连发射击时枪口中心点绕x轴和z轴方向振幅显著减小,振动量降低,角速度趋于稳定,未出现固定连接工况中持续增大现象,弹着点全数散布圆半径R100减至86.4mm,降幅34.6%。实弹测试数据显示,单发和5连发R100分别为75.7mm、94.5mm,降低21.1%、32.8%,实验数据与仿真结果一致性较好,验证了数值仿真的准确性,证实了所设计的缓冲装置能有效抑制射击振动,大幅提高四足无人作战平台射击稳定性和精度,研究成果为无人作战平台结构优化设计提供了技术支撑。
刘坤, 冯颖, 康宝, 吴志林, 宋杰, 朱韬. 冲击载荷下四足无人作战平台射击振动特性[J]. 兵工学报, 2025, 46(10): 250282-.
LIU Kun, FENG Ying, KANG Bao, WU Zhilin, SONG Jie, ZHU Tao. Study on the Shooting Vibration Characteristics of a Quadruped Unmanned Combat Platform under Impact Loads[J]. Acta Armamentarii, 2025, 46(10): 250282-.
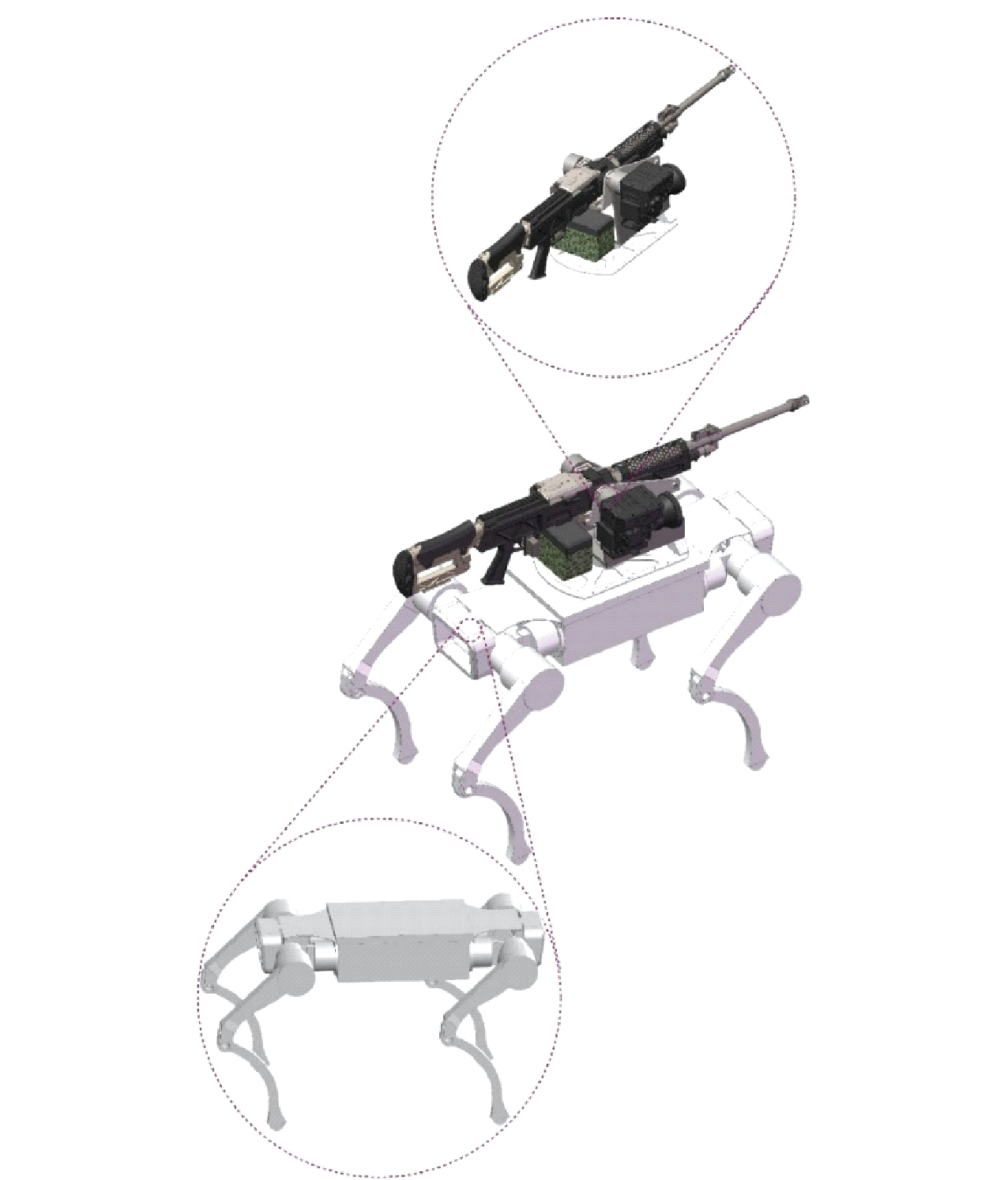
图1 四足无人作战平台总体结构
Fig.1 Overall structure of quadruped unmanned combat platform

图2 各系统组成
Fig.2 Composition of each system
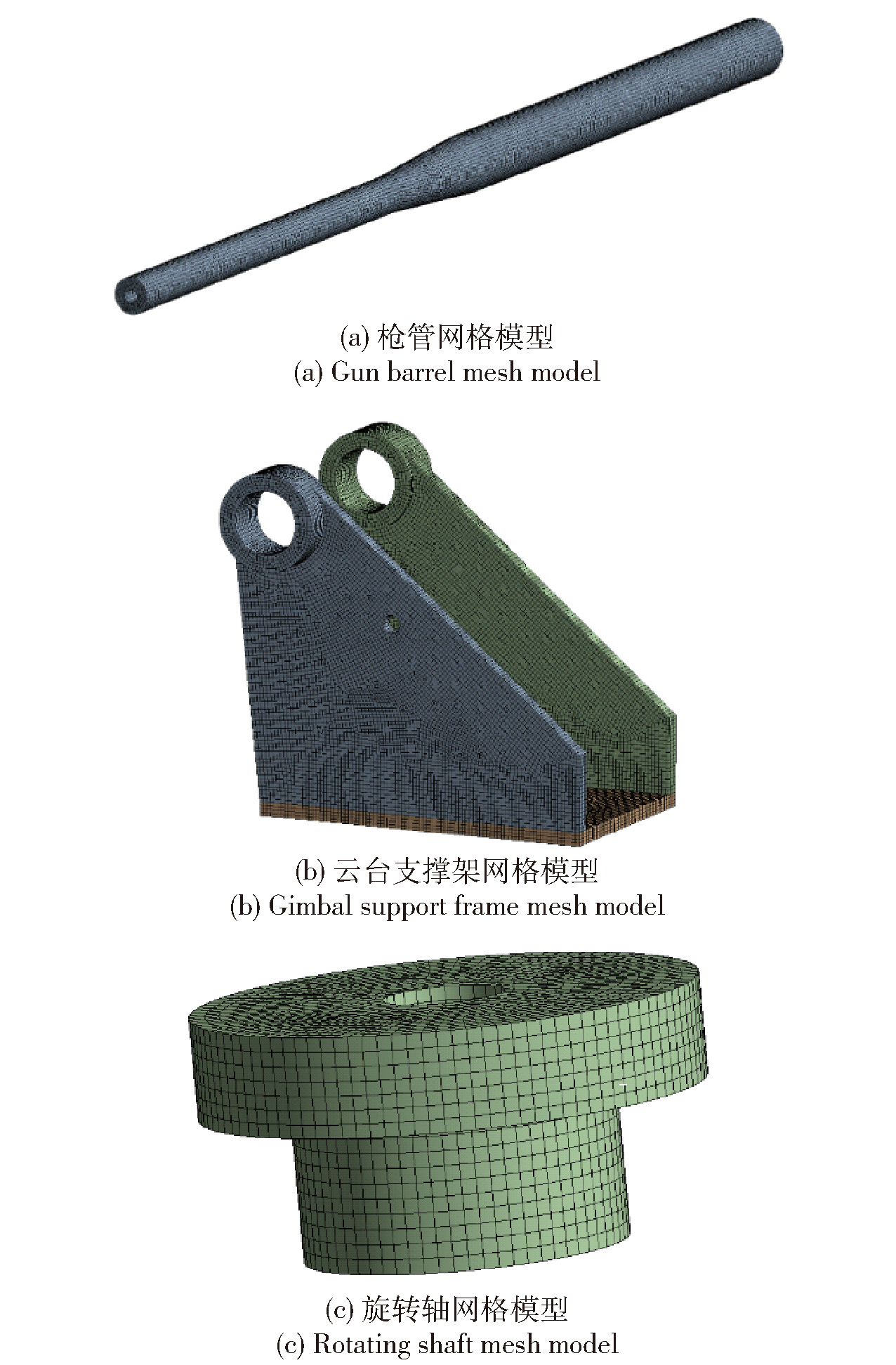
图3 网格模型
Fig.3 Mesh model

图4 四足无人作战平台刚柔耦合模型
Fig.4 Rigid-flexible coupling model of quadruped unmanned combat platform
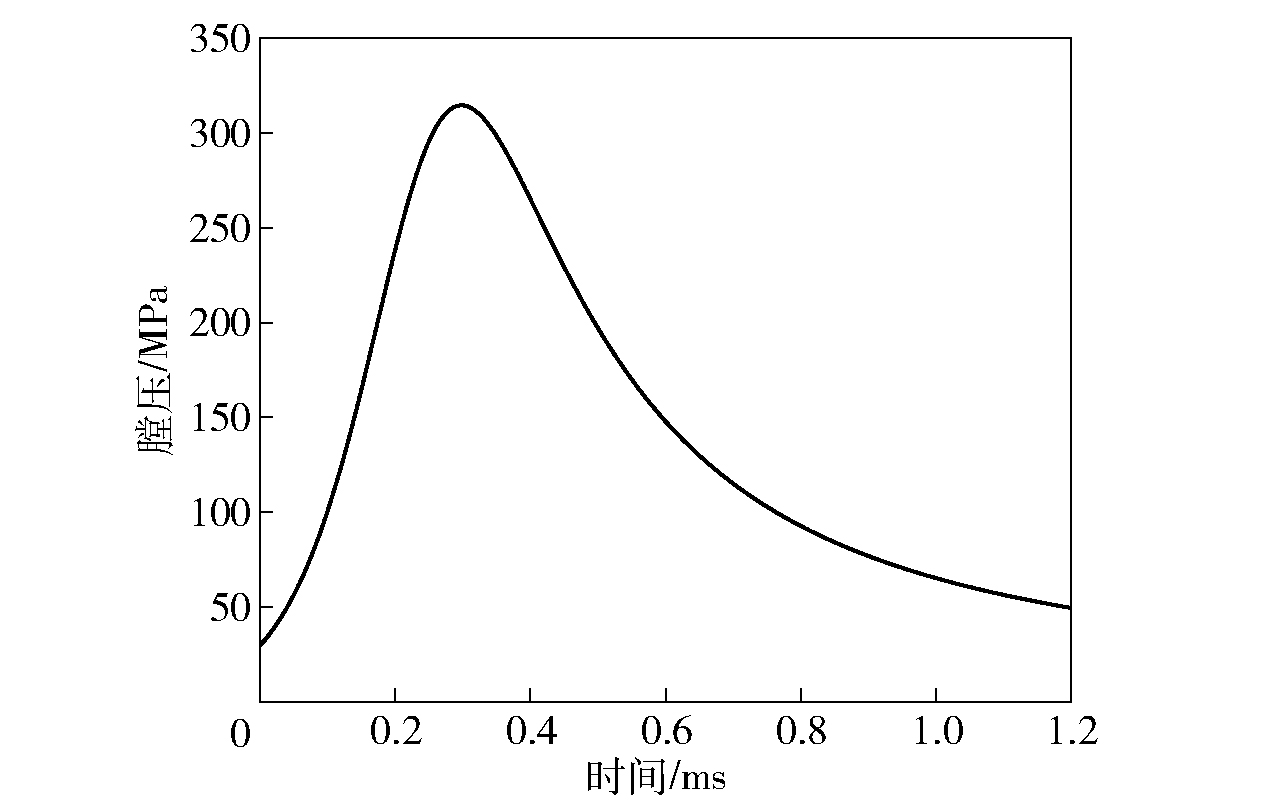
图5 单发射击膛压-时间曲线
Fig.5 Single-shot pressure-time curve
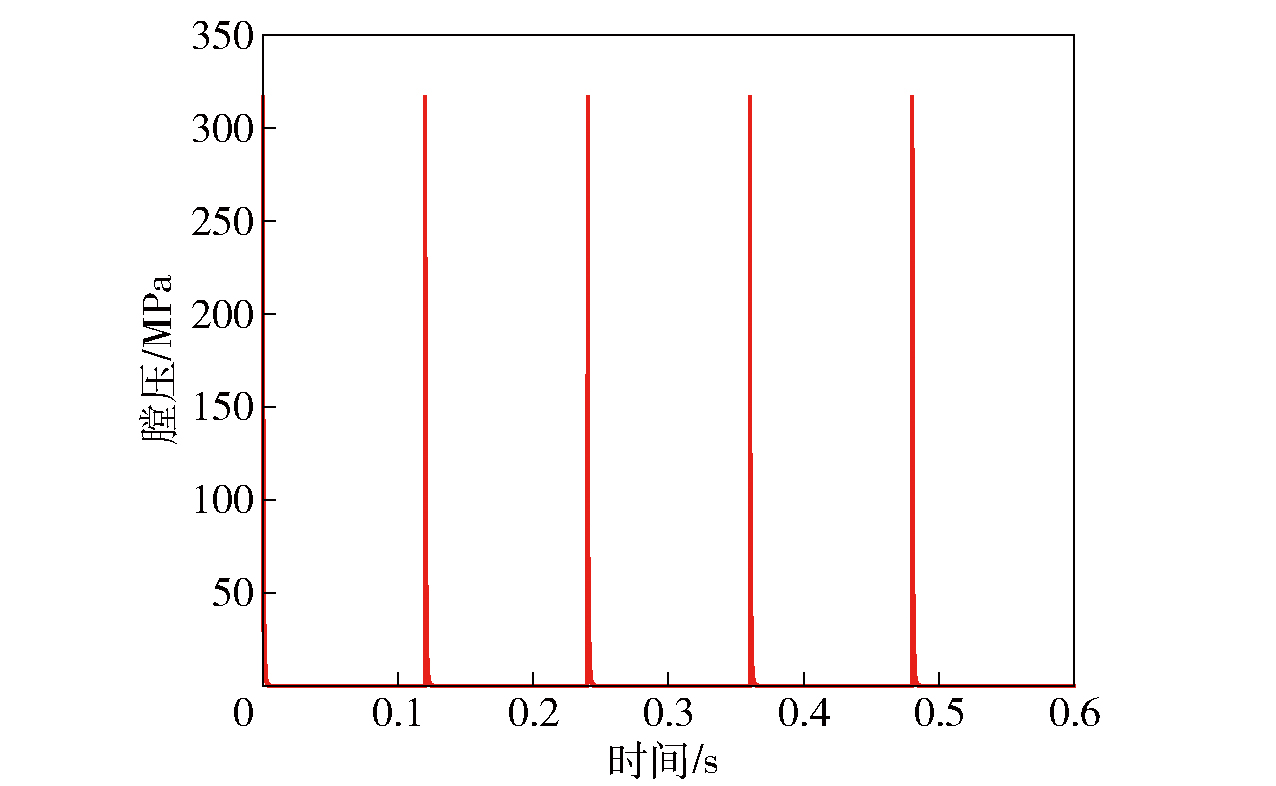
图6 5连发射击膛压-时间曲线
Fig.6 Five-round burst pressure-time curve
图7 枪口振动分析坐标系
Fig.7 Coordinate system for muzzle vibration analysis
图8 5连发射击时枪口中心点沿x轴和z轴方向振幅变化
Fig.8 Amplitude variation of muzzle center point along x-axis and z-axis during five-five-round bursts
| 振动特性 | 第1发 | 第2发 | 第3发 | 第4发 | 第5发 |
|---|---|---|---|---|---|
| x轴方向振幅/mm | 0.08 | 1.1 | 3.1 | 3.1 | 0.9 |
| z轴方向振幅/mm | 0.51 | 3.1 | 4.4 | 3.4 | 6.3 |
| 射击振动量/mm | 0.516 | 3.289 | 5.382 | 4.601 | 6.364 |
表1 5连发射击过程中弹头出膛瞬间枪口中心点的振动特性
Table 1 The vibration characteristics of muzzle center point at the instant of bullet exit during a five-round burst firing
| 振动特性 | 第1发 | 第2发 | 第3发 | 第4发 | 第5发 |
|---|---|---|---|---|---|
| x轴方向振幅/mm | 0.08 | 1.1 | 3.1 | 3.1 | 0.9 |
| z轴方向振幅/mm | 0.51 | 3.1 | 4.4 | 3.4 | 6.3 |
| 射击振动量/mm | 0.516 | 3.289 | 5.382 | 4.601 | 6.364 |
| 角位移 | 第1发 | 第2发 | 第3发 | 第4发 | 第5发 |
|---|---|---|---|---|---|
| x轴方向角位移/(°) | 0.002 | 0.028 | 0.081 | 0.081 | 0.02 |
| z轴方向角位移/(°) | 0.013 | 0.08 | 0.12 | 0.09 | 0.164 |
表2 枪口中心点沿x轴和z轴方向角位移
Table 2 Angular displacement of muzzle center point along x-axis and z-axis
| 角位移 | 第1发 | 第2发 | 第3发 | 第4发 | 第5发 |
|---|---|---|---|---|---|
| x轴方向角位移/(°) | 0.002 | 0.028 | 0.081 | 0.081 | 0.02 |
| z轴方向角位移/(°) | 0.013 | 0.08 | 0.12 | 0.09 | 0.164 |
图9 枪口中心点绕x轴方向角速度变化
Fig.9 Angular velocity variation of muzzle center point about x-axis
图10 枪口中心点绕z轴方向角速度变化
Fig.10 Angular velocity variation of the muzzle center point around z-axis
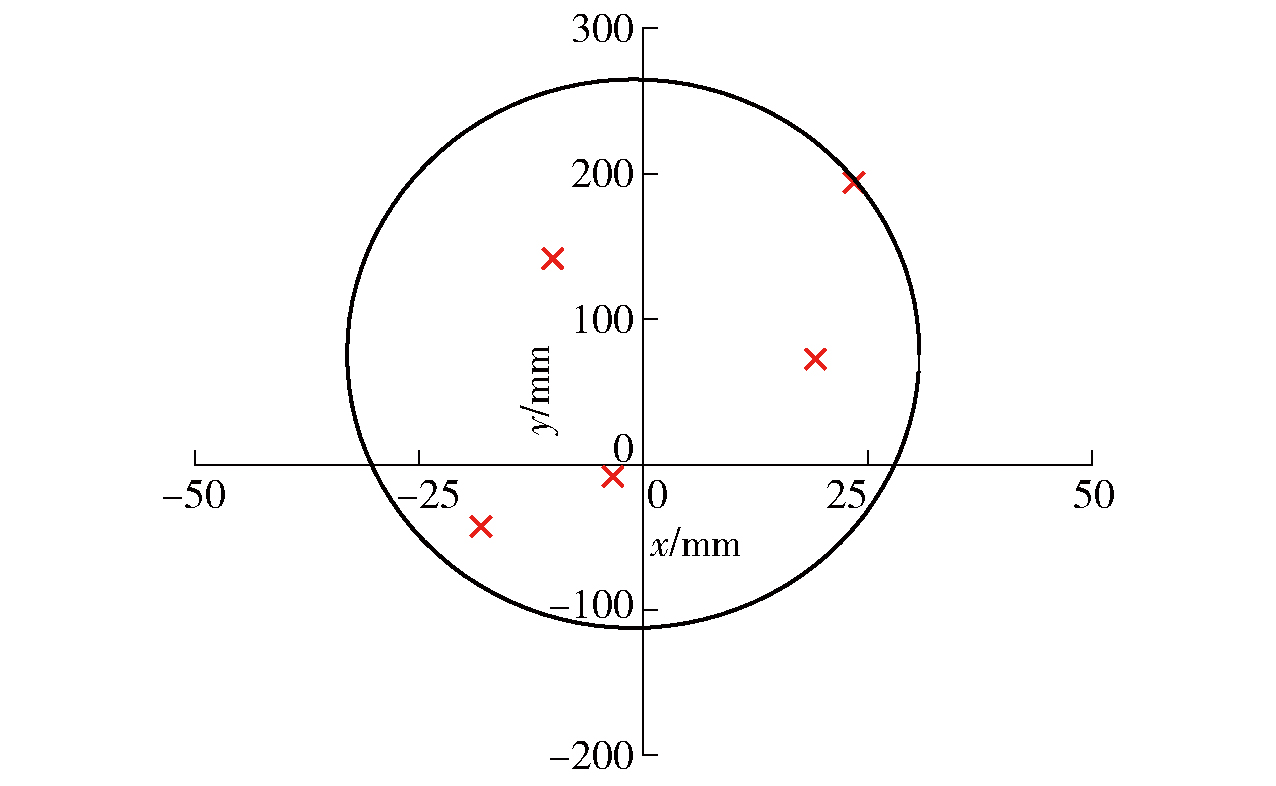
图11 固定连接时5连发弹着点分布理论结果
Fig.11 Theoretical results of bullet impact point distribution for 5-round burst firing in fixed connection mode

图12 双向缓冲装置
Fig.12 Bidirectional buffering device
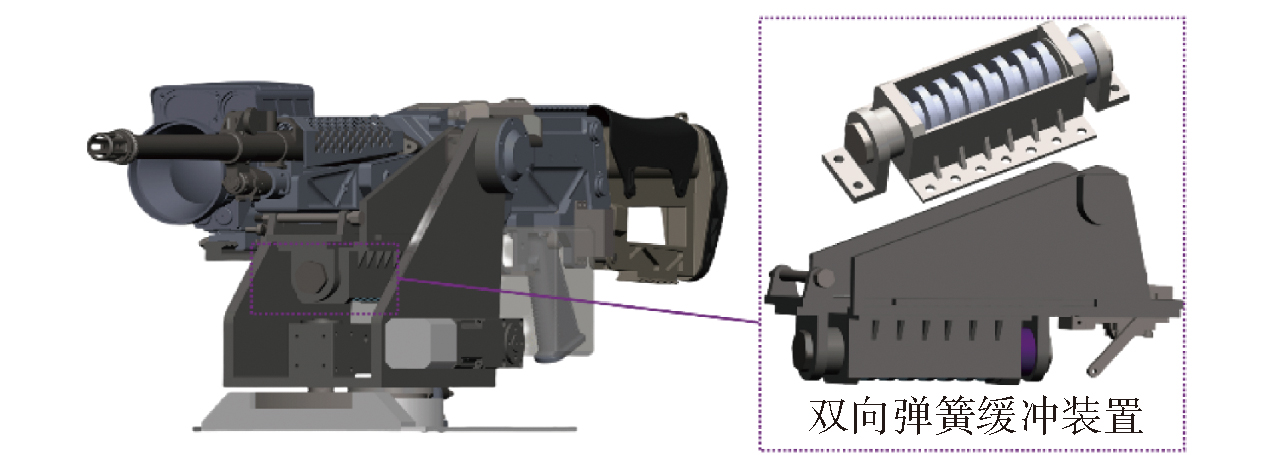
图13 安装双向缓冲装置的武器平台
Fig.13 Weapon platform equipped with a bidirectional buffering device

图14 3种不同刚度的双向缓冲装置行程变化规律
Fig.14 Travel variation patterns of bidirectional buffering device with three different stiffness levels
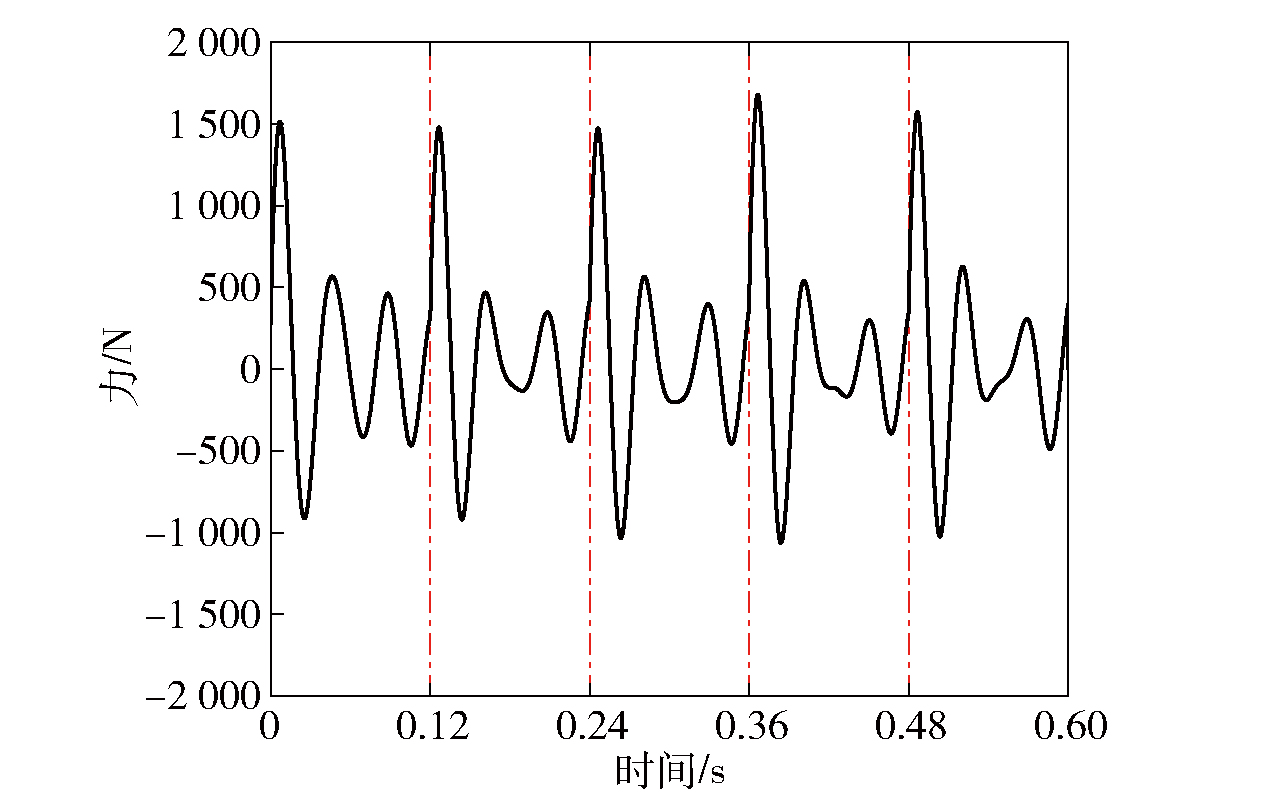
图15 刚度250N/mm的弹簧受力变化规律
Fig.15 Force variation pattern of spring with a stiffness of 250N/mm
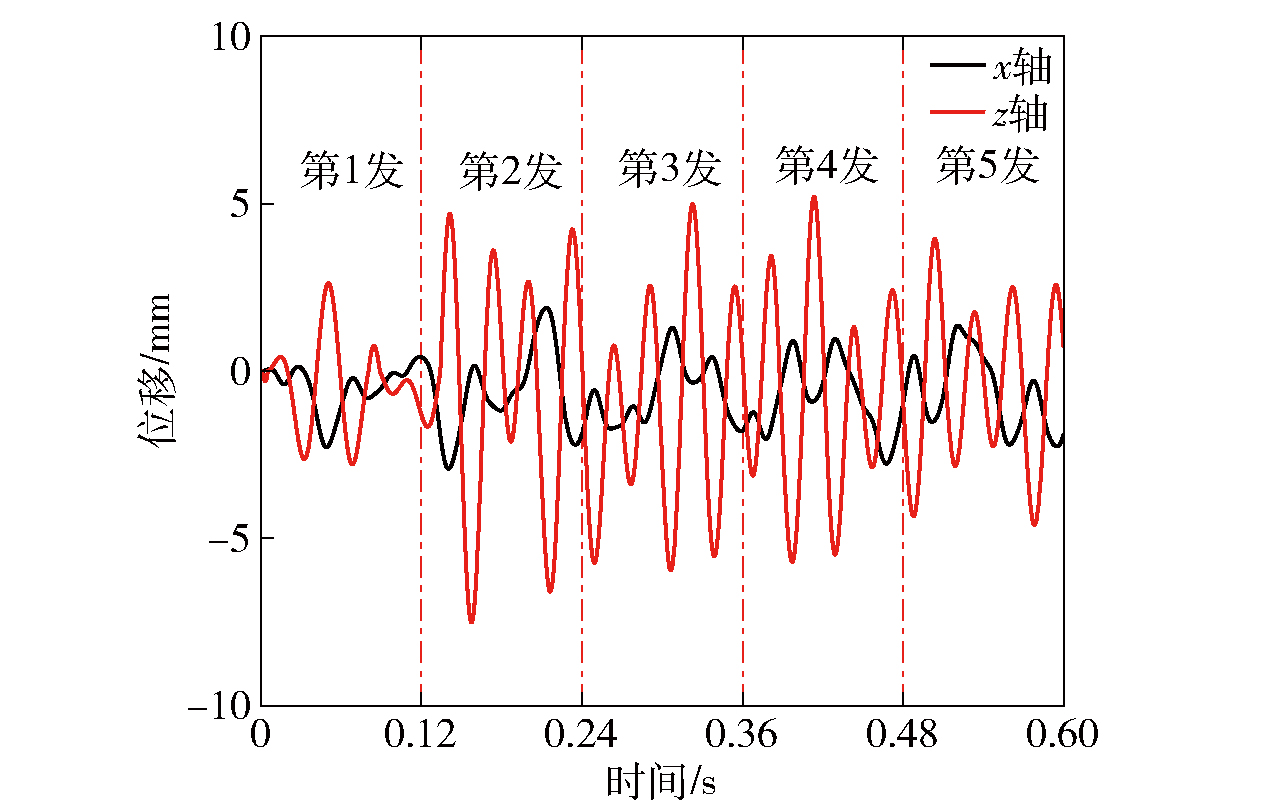
图16 5连发射击时枪口中心点沿x轴和z轴方向振幅变化
Fig.16 Amplitude variation of muzzle center point along x-axis and z-axis during 5-round burst firing
| 振动特性 | 第1发 | 第2发 | 第3发 | 第4发 | 第5发 |
|---|---|---|---|---|---|
| x方向振幅/mm | 0.1 | 0.4 | 1.9 | 2.1 | 0.8 |
| z方向振幅/mm | 0.3 | 1.5 | 3.1 | 2.5 | 3.1 |
| 振动量/mm | 0.32 | 1.55 | 3.64 | 3.26 | 3.20 |
表3 5连发射击过程中弹头出膛瞬间枪口中心点的振动特性
Table 3 The vibration characteristics of muzzle center point at the instant of bullet exit during a five-round burst firing
| 振动特性 | 第1发 | 第2发 | 第3发 | 第4发 | 第5发 |
|---|---|---|---|---|---|
| x方向振幅/mm | 0.1 | 0.4 | 1.9 | 2.1 | 0.8 |
| z方向振幅/mm | 0.3 | 1.5 | 3.1 | 2.5 | 3.1 |
| 振动量/mm | 0.32 | 1.55 | 3.64 | 3.26 | 3.20 |
| 角位移 | 第1发 | 第2发 | 第3发 | 第4发 | 第5发 |
|---|---|---|---|---|---|
| x轴方向角位移/(°) | 0.003 | 0.039 | 0.081 | 0.065 | 0.081 |
| z轴方向角位移/(°) | 0.008 | 0.08 | 0.12 | 0.09 | 0.164 |
表4 枪口中心点沿x轴和z轴方向角位移
Table 4 Angular displacement of muzzle center point along x-axis and z-axis
| 角位移 | 第1发 | 第2发 | 第3发 | 第4发 | 第5发 |
|---|---|---|---|---|---|
| x轴方向角位移/(°) | 0.003 | 0.039 | 0.081 | 0.065 | 0.081 |
| z轴方向角位移/(°) | 0.008 | 0.08 | 0.12 | 0.09 | 0.164 |

图17 枪口中心点绕x轴方向角速度变化
Fig.17 Angular velocity variation of muzzle center point around x-axis

图18 枪口中心点绕z轴方向角速度变化
Fig.18 Angular velocity variation of muzzle center point around z-axis

图19 安装缓冲装置时5连发弹着点分布
Fig.19 Impact point distribution of five-round burst with buffering device

图20 实验用武器与弹药
Fig.20 Experimental weapons and ammunition

图21 实验原理
Fig.21 Experimental principle

图22 实验场景布置
Fig.22 Experimental scene setup

图23 固定连接时5连发弹着点分布实验结果
Fig.23 Experimental results of impact point distribution of 5-round bursts under fixed connection conditions

图24 固定连接时10次单发弹着点分布实验结果
Fig.24 Experimental results of 10 single-shot impact point distribution under fixed connection conditions
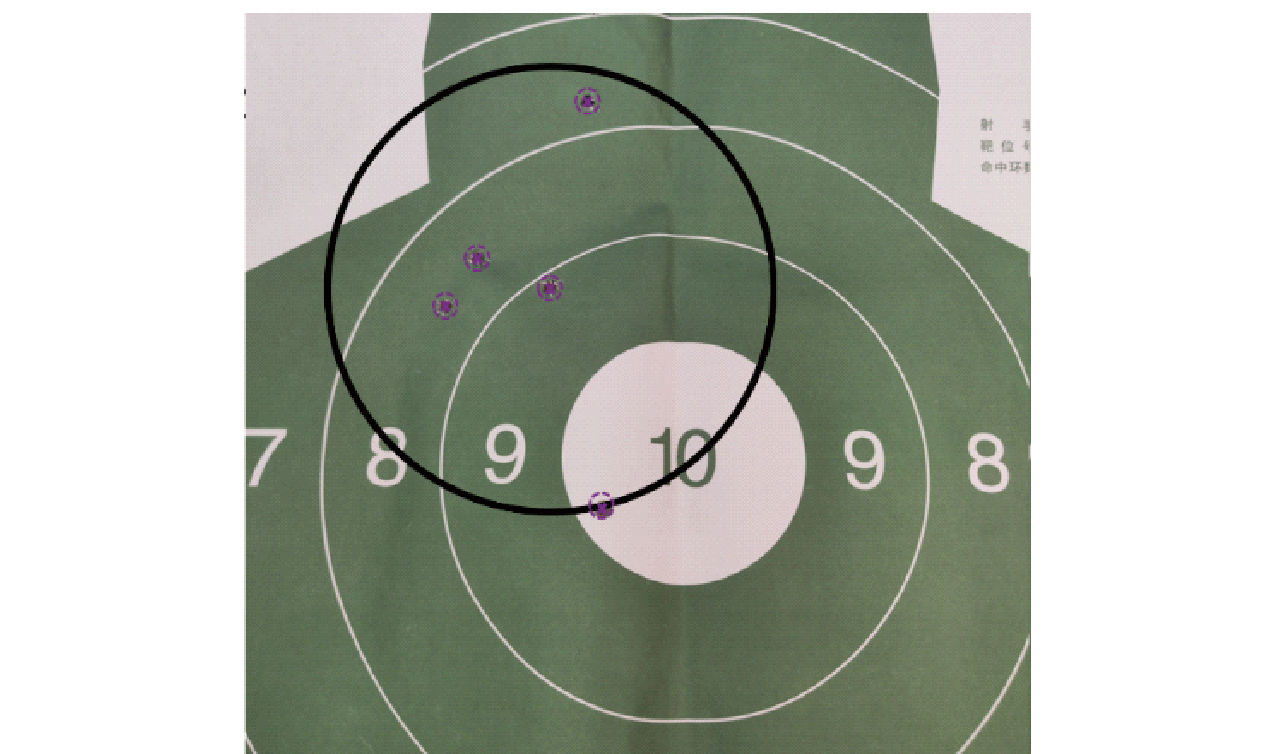
图25 安装缓冲装置时5连发弹着点分布实验结果
Fig.25 Experimental results of impact point distribution of 5-round burst with buffering device

图26 安装缓冲装置时10次单发弹着点散布实验结果
Fig.26 Experimental results of 10 single-shot dispersion pattern with buffering device
| [1] |
李楠, 李晗. 军用地面无人平台现状及发展趋势研究[J]. 无人系统技术, 2018, 1(2): 34-42.
|
|
|
|
| [2] |
降晨星, 姚其昌, 许鹏, 等. 新技术形势下四足、双足机器人技术的变革[J]. 兵工学报, 2023, 44(S2): 84-89.
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
刘思宇, 廖峻北, 雷飞, 等. 用于四足机器人的并联弹性腿足关节设计与优化[J]. 兵工学报, 2023, 44(S2): 71-83.
|
|
|
|
| [9] |
苏波, 闫曈, 许威, 等. 四足机器人高机动越野技术研究[J]. 中国科学: 技术科学, 2023, 53(9): 1574-1588.
|
|
|
|
| [10] |
许威, 苏波, 江磊, 等. 足式越野机器人集群系统关键技术与应用展望[J]. 兵工学报, 2023, 44(9): 2568-2579.
|
|
|
|
| [11] |
苏家豪, 刘思宇, 卢春雷, 等. 用于四足机器人的离散式串联弹性脊柱关节设计[J]. 兵工学报, 2025, 46(4): 137-149.
|
|
|
|
| [12] |
许鹏, 赵建新, 范文慧, 等. 四足机器人特定复杂运动技能控制[J]. 兵工学报, 2023, 44(S2): 135-145.
|
|
|
|
| [13] |
桑董辉, 陈原, 高军. 由2自由度并联髋关节构成的脊柱式四足步行机器人步态规划和稳定性分析[J]. 兵工学报, 2020, 41(6): 1188-1200.
|
|
|
|
| [14] |
许辉, 张瑞洁, 蒋明飞, 等. 弹膛偏移对小口径埋头枪弹挤进动态响应的影响[J]. 兵工学报, 2022, 43(9): 2219-2230.
|
|
|
|
| [15] |
华洪良, 廖振强, 宋杰, 等. 喷管气流反推技术在改善机枪射击精度中的应用[J]. 兵工学报, 2015, 36(12): 2241-2246.
|
|
|
|
| [16] |
牛草, 顾广鑫, 朱磊, 等. 车载导弹发射架结构有限元分析与拓扑优化设计[J]. 兵工学报, 2023, 44(2): 437-451.
|
|
|
|
| [17] |
萧辉, 杨国来, 孙全兆. 火炮多柔体动力学结构优化研究[J]. 兵工学报, 2017, 38(1): 27-34.
|
|
|
|
| [18] |
张志勇, 王团团, 郭浩, 等. 弹丸初速可调的电磁轨道炮对空射击策略[J]. 兵工学报, 2021, 42(2): 430-437.
|
|
|
|
| [19] |
罗中峰, 管小荣, 徐亚栋, 等. 某火炮弹丸在炮口状态的动态灵敏度分析[J]. 兵工学报, 2017, 38(12): 2328-2336.
|
|
|
|
| [20] |
韩子鹏, 等. 弹箭外弹道学[M]. 北京: 北京理工大学出版社, 2014.
|
|
|
| [1] | 郑卓扬, 董恒, 武海军, 贾桐庆, 杨冠侠, 黄风雷. 侵彻弹引系统非线性动力学模型及响应特性[J]. 兵工学报, 2025, 46(4): 240097-. |
| [2] | 韩政达, 吴云豪, 张伟, 刘翼, 刘金刚, 朱卫国. 车用大功率柴电机组机电耦合动力学特性及控制[J]. 兵工学报, 2025, 46(4): 240397-. |
| [3] | 王云龙, 赵正媛, 吴志林, 李忠新. 轻型遥控武器站多工况力学特性及射击扰动[J]. 兵工学报, 2025, 46(10): 250200-. |
| [4] | 解云坤, 刘辉, 高普, 吴云豪, 李新毅, 周如意. 车用高速机电复合传动系统固有振动特性及共振转速研究[J]. 兵工学报, 2025, 46(1): 231149-. |
| [5] | 江腾耀, 李伟, 雷昱, 胡鑫, 王伟伟. 自行高炮稳定跟踪系统建模与谐振抑制方法[J]. 兵工学报, 2024, 45(9): 3029-3043. |
| [6] | 任晓磊, 刘辉, 韩立金, 陈前, 聂士达, 谢景硕, 崔山. 复杂地形下轮腿复合机动平台动态运动控制[J]. 兵工学报, 2024, 45(9): 2993-3003. |
| [7] | 代程, 曹岩枫, 何龙, 徐诚. 典型小口径自动步枪热散形成原因分析与结果预估[J]. 兵工学报, 2024, 45(3): 885-892. |
| [8] | 刘太素, 尹强, 李勇, 张云添. 链式回转弹仓刚柔耦合动力学建模及特性分析[J]. 兵工学报, 2024, 45(11): 4133-4144. |
| [9] | 赵猛, 戴开达, 向召, 姜涛, 赵晓松, 徐豫新. 近爆荷载下聚氯乙烯泡沫夹芯板的动力学模型研究[J]. 兵工学报, 2023, 44(12): 3884-3896. |
| [10] | 张发平, 张书畅, 武锴, 张云贺, 阎艳. 基于代理模型进化的履带车辆动力学参数优化[J]. 兵工学报, 2023, 44(1): 27-39. |
| [11] | 曾根, 马长军, 庞大千, 李同辉, 张楠. 机电复合传动高线速转子-行星齿轮系统耦合振动特性[J]. 兵工学报, 2023, 44(1): 156-164. |
| [12] | 黄陈磊, 蒋明飞, 陈莉, 李忠新, 吴志林. 热身管下小口径枪弹弹头壳材料对其膛内运动的影响规律[J]. 兵工学报, 2022, 43(9): 2241-2251. |
| [13] | 赵春明, 焦胜海, 王晓飞, 姚跃民, 黄朝东. 柔性充气空间飞行器姿态控制系统设计[J]. 兵工学报, 2022, 43(6): 1346-1354. |
| [14] | 鲁强, 高志峰, 钟小兵, 戴军, 黄秋, 胡绍云. 有限转角钢带的传动特性及预紧张力对输出特性的影响[J]. 兵工学报, 2022, 43(3): 676-685. |
| [15] | 钱林方, 陈光宋, 林通, 刘太素. 车载炮底盘载荷分离设计技术[J]. 兵工学报, 2022, 43(11): 2773-2784. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4