
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (6): 240498-.doi: 10.12382/bgxb.2024.0498
路潇然1, 邹渊1,*( ), 张旭东1, 孙巍1, 孟逸豪1, 张彬2
), 张旭东1, 孙巍1, 孟逸豪1, 张彬2
收稿日期:2024-06-24
上线日期:2025-06-28
通讯作者:
基金资助:
LU Xiaoran1, ZOU Yuan1,*(), ZHANG Xudong1, SUN Wei1, MENG Yihao1, ZHANG Bin2
Received:2024-06-24
Online:2025-06-28
摘要:
为优化串联式混合动力履带车辆的燃油经济性及能量管理系统的离线训练用时,提出一种采用蒙乔森(Munchausen)优化算法及优先经验采样(Prioritized Experience Replay,PER)算法的双重深度Q网络(Double-Deep Q_learning Network,DDQN)的能量管理策略。通过包含发动机发电机组、动力电池组及驱动电机的模型对整车功率需求进行解算,根据功率需求,用能量管理控制策略对发动机节气门开度进行最优控制。采用蒙乔森优化算法、PER算法共同作用于离散型DDQN,同时提高网络对高影响数据的选取训练概率及对最优解的专注训练能力,在2种算法共同作用下DDQN能量管理策略的燃油经济性可实现对连续型复杂神经网络的超越,同时具有较大的离线训练用时优势。仿真实验结果表明:与基于PER的双延迟深度确定性策略梯度算法相比,新的能量管理控制策略可使得串联式混动履带车的燃油经济性平均提高4.6%,控制策略训练用时平均优化了35.3%。
中图分类号:
路潇然, 邹渊, 张旭东, 孙巍, 孟逸豪, 张彬. 基于Munchausen-PER算法优化的混合动力履带车辆能量管理策略[J]. 兵工学报, 2025, 46(6): 240498-.
LU Xiaoran, ZOU Yuan, ZHANG Xudong, SUN Wei, MENG Yihao, ZHANG Bin. Energy Management Strategy Optimized by Munchausen-PER-DDQN for Hybrid Tracked Vehicle[J]. Acta Armamentarii, 2025, 46(6): 240498-.

图1 课题组自研串联式HETV
Fig.1 Series hybrid-electric tracked vehicle
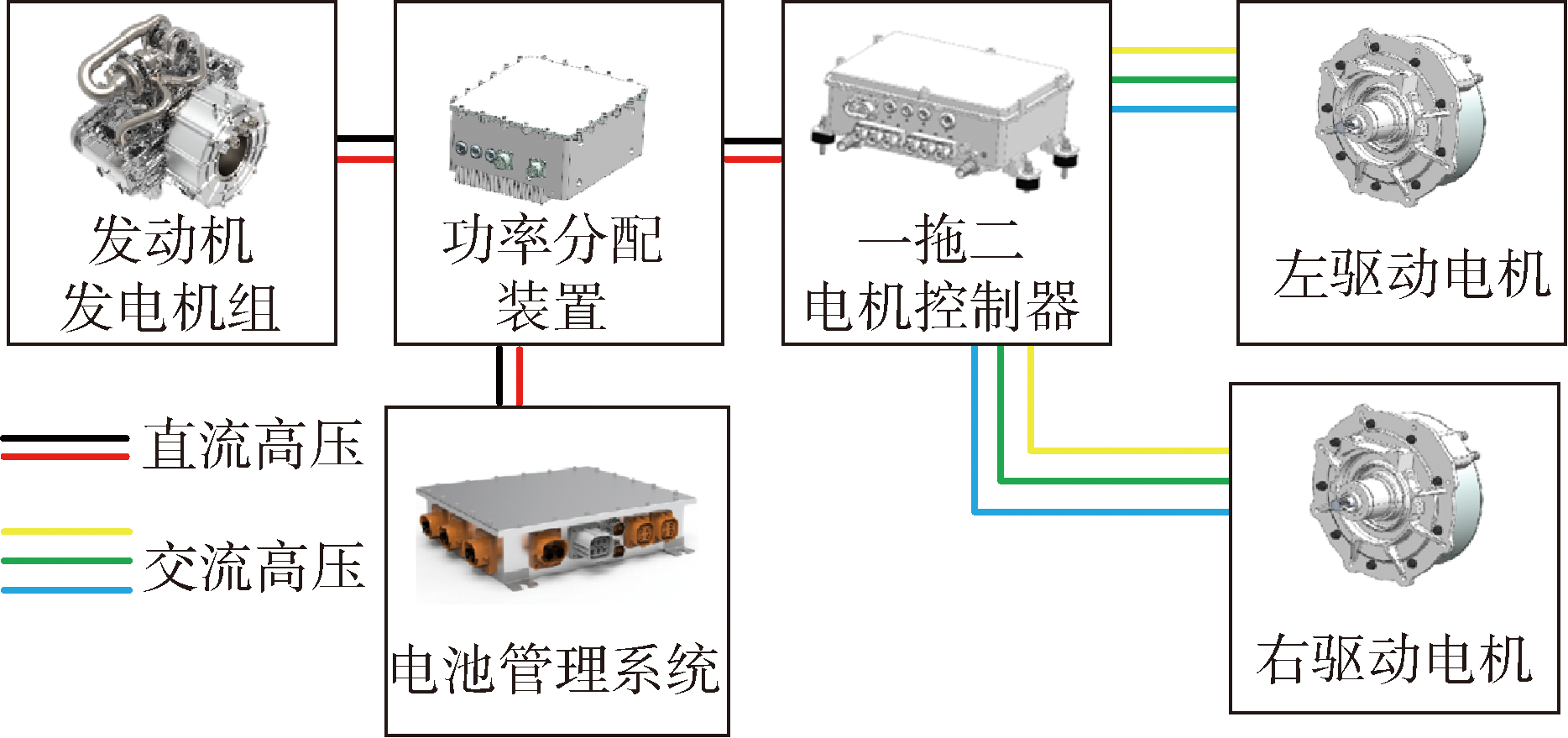
图2 动力驱动系统拓扑结构
Fig.2 Topological structure of powertrain
| 名称 | 参数 | 数值 |
|---|---|---|
| 车辆参数 | 整车总质量/(m·kg-1) | 1500 |
| 重力加速度g/(kg·m-2) | 9.8 | |
| 滚动阻力系数f | 0.0494 | |
| 履带接地长度L/m | 1.6 | |
| 迎风面积A/m2 | 0.91 | |
| 传动效率η | 0.92 | |
| 空气阻力系数Cd | 0.9 | |
| 发电机参数 | 发电机转动惯量Je/(kg·m2) | 0.207 |
| 峰值功率/kW | 30 | |
| 反电动势系数Ke/(V·(rad/s)-1) | 1.8024 | |
| 等效阻抗系数Kx/(N·m·A-2) | 0.0098 | |
| 动力电池参数 | 动力电池内阻Rin/Ω | 0.1 |
| 动力电池容量/(A·h) | 45.5 |
表1 课题组自研串联式HETV技术参数
Table 1 Parameters of CyberTank Ⅱ
| 名称 | 参数 | 数值 |
|---|---|---|
| 车辆参数 | 整车总质量/(m·kg-1) | 1500 |
| 重力加速度g/(kg·m-2) | 9.8 | |
| 滚动阻力系数f | 0.0494 | |
| 履带接地长度L/m | 1.6 | |
| 迎风面积A/m2 | 0.91 | |
| 传动效率η | 0.92 | |
| 空气阻力系数Cd | 0.9 | |
| 发电机参数 | 发电机转动惯量Je/(kg·m2) | 0.207 |
| 峰值功率/kW | 30 | |
| 反电动势系数Ke/(V·(rad/s)-1) | 1.8024 | |
| 等效阻抗系数Kx/(N·m·A-2) | 0.0098 | |
| 动力电池参数 | 动力电池内阻Rin/Ω | 0.1 |
| 动力电池容量/(A·h) | 45.5 |
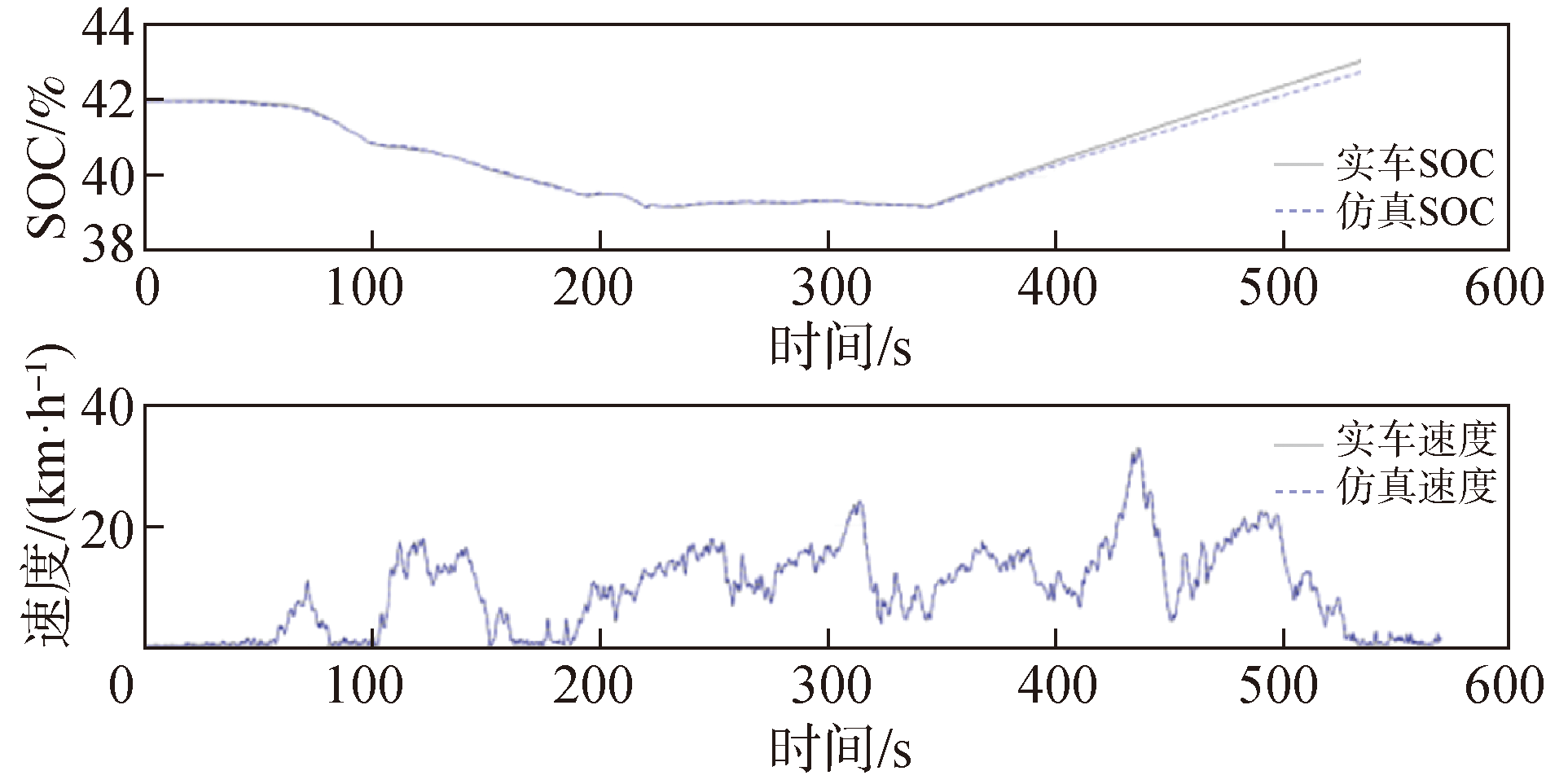
图3 电池SOC与车速的仿真数据与实车数据对比
Fig.3 Comparison between simulated data and real data of SOC curve and vehicle speed curve

图4 基于Munchausen-PER-DDQN算法的EMS框架
Fig.4 Framework of EMS based on Munchausen-PER-DDQN algorithm

图5 Munchause-PER-DDQN算法的计算流程
Fig.5 Calculation flow of Munchause-PER-DDQN algorithm

图6 Munchausen-PER-DDQN算法训练工况
Fig.6 Training condition of Munchausen-PER-DDQN algorithm
| 参数 | 数值 |
|---|---|
| Replay Buffer大小 | 8192 |
| 每个回合的训练步数 | 589 |
| Batch size | 64 |
| 折扣因子γ | 0.99 |
| 动作网络学习率lr | 0.0001 |
| 延迟更新参数d | 2 |
| 软更新参数τ | 0.005 |
| 优先采样权重调节因子β | 0.4 |
| 控制均匀采样和贪婪抽样的超参数α | 0.6 |
| 训练回合数 | 100 |
表2 Munchause-PER-DDQN算法超参数
Table 2 Hyper parameters of Munchause-PER-DDQN algorithm
| 参数 | 数值 |
|---|---|
| Replay Buffer大小 | 8192 |
| 每个回合的训练步数 | 589 |
| Batch size | 64 |
| 折扣因子γ | 0.99 |
| 动作网络学习率lr | 0.0001 |
| 延迟更新参数d | 2 |
| 软更新参数τ | 0.005 |
| 优先采样权重调节因子β | 0.4 |
| 控制均匀采样和贪婪抽样的超参数α | 0.6 |
| 训练回合数 | 100 |
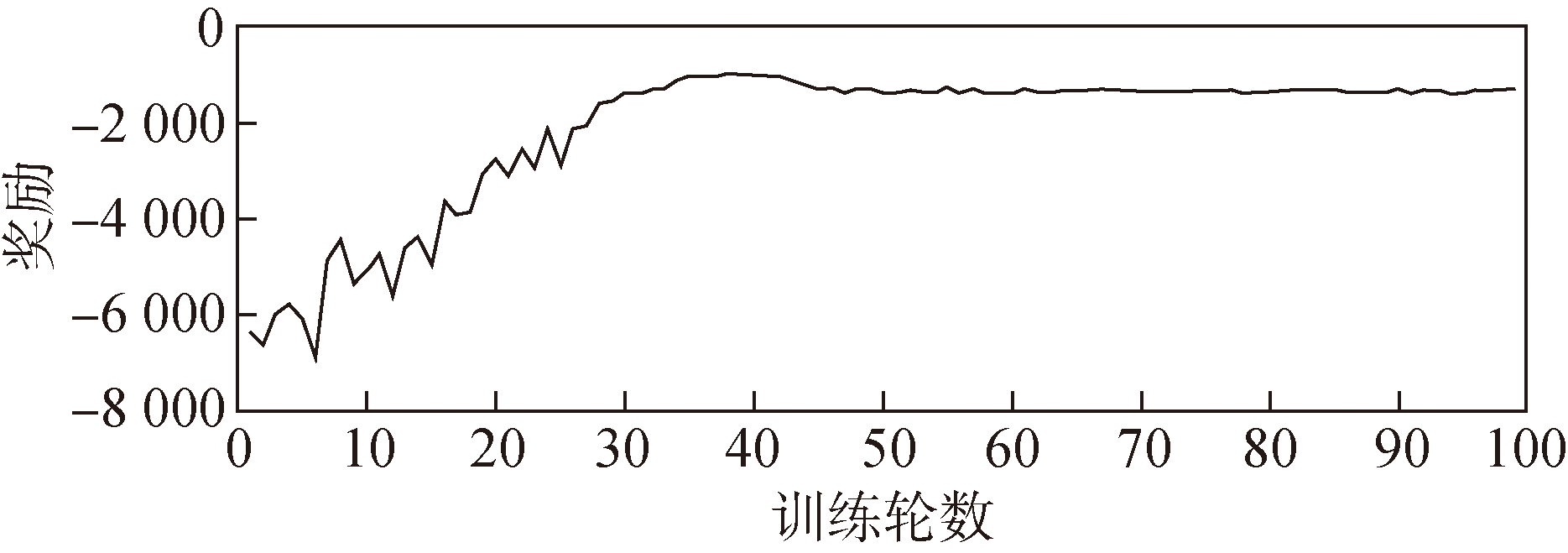
图7 训练中的总评价曲线
Fig.7 Reward curve of training process
| 参数 | 数值 |
|---|---|
| Replay Buffer大小 | 8192 |
| 每个回合的训练步数 | 589 |
| Batch size | 64 |
| 折扣因子γ | 0.99 |
| 动作网络学习率lr | 0.0001 |
| 延迟更新参数d | 2 |
| 软更新参数τ | 0.005 |
| 优先采样权重调节因子β | 0.4 |
| 控制均匀采样和贪婪抽样的超参数α | 0.6 |
| 训练回合数 | 35 |
表3 Munchause-PER-DDQN算法超参数
Table 3 Hyper parameters of Munchause-PER-DDQN algorithm
| 参数 | 数值 |
|---|---|
| Replay Buffer大小 | 8192 |
| 每个回合的训练步数 | 589 |
| Batch size | 64 |
| 折扣因子γ | 0.99 |
| 动作网络学习率lr | 0.0001 |
| 延迟更新参数d | 2 |
| 软更新参数τ | 0.005 |
| 优先采样权重调节因子β | 0.4 |
| 控制均匀采样和贪婪抽样的超参数α | 0.6 |
| 训练回合数 | 35 |

图8 TD3-PER、DDQN及Munchausen-PER-DDQN算法SOC曲线
Fig.8 SOC curves of TD 3-PER,DDQN and Munchausen-PER-DDQN algorithm
| 序号 | 算法 | 训练用时/s | 油量消耗/g |
|---|---|---|---|
| 1 | DDQN | 510 | 268 |
| 2 | 515 | 275 | |
| 3 | 521 | 267 | |
| 4 | 512 | 263 | |
| 5 | 511 | 266 | |
| 6 | TD3-PER | 918 | 259 |
| 7 | 918 | 264 | |
| 8 | 924 | 255 | |
| 9 | 899 | 265 | |
| 10 | 896 | 279 | |
| 11 | Munchausen-PER-DDQN | 620 | 250 |
| 12 | 603 | 251 | |
| 13 | 598 | 254 | |
| 14 | 521 | 252 | |
| 15 | 607 | 254 |
表4 基于TD3-PER、DDQN与Munchausen-PER-DDQN算法的训练用时与燃油消耗量
Table 4 Calculated training duration and fuel consumption of TD 3-PER,DDQN and Munchausen-PER-DDQN algorithms
| 序号 | 算法 | 训练用时/s | 油量消耗/g |
|---|---|---|---|
| 1 | DDQN | 510 | 268 |
| 2 | 515 | 275 | |
| 3 | 521 | 267 | |
| 4 | 512 | 263 | |
| 5 | 511 | 266 | |
| 6 | TD3-PER | 918 | 259 |
| 7 | 918 | 264 | |
| 8 | 924 | 255 | |
| 9 | 899 | 265 | |
| 10 | 896 | 279 | |
| 11 | Munchausen-PER-DDQN | 620 | 250 |
| 12 | 603 | 251 | |
| 13 | 598 | 254 | |
| 14 | 521 | 252 | |
| 15 | 607 | 254 |

图9 训练工况中发动机工作点位对比
Fig.9 Engine working positions under training condition

图10 实车采集两种验证工况
Fig.10 Two testing conditions based on vehicle data

图11 验证工况1中发动机工作点位对比
Fig.11 Engine working positions under testing condition 1

图12 验证工况2中发动机工作点位对比
Fig.12 Engine working positions under testing condition 2
| EMS算法 | 燃油消耗 | |
|---|---|---|
| 验证工况1 | 验证工况2 | |
| DDQN | 290 | 291 |
| TD3-PER | 281 | 281 |
| Munchausen-PER-DDQN | 263 | 275 |
表5 基于TD3-PER、DDQN与Munchausen-PER-DDQN算法在验证工况1、2中的燃油消耗量
Table 5 Calculated fuel consumption of TD 3-PER,DDQN and Munchausen-PER-DDQN algorithms under testing conditions 1and 2
| EMS算法 | 燃油消耗 | |
|---|---|---|
| 验证工况1 | 验证工况2 | |
| DDQN | 290 | 291 |
| TD3-PER | 281 | 281 |
| Munchausen-PER-DDQN | 263 | 275 |
| [1] |
孙逢春, 张承宁. 装甲车辆混合动力电传动技术[M]. 北京: 国防工业出版社, 2008.
|
|
|
|
| [2] |
侯旭朝, 马越, 项昌乐. 电驱动履带车辆转向稳定性控制研究[J]. 机械工程学报, 2024, 60(8):233-244.
|
|
|
|
| [3] |
邹渊, 焦飞翔, 崔星. 等. 地面无人平台动力源集成技术发展综述[J]. 兵工学报, 2020, 41(10):2132-2140.
|
|
|
|
| [4] |
|
| [5] |
赵秀春, 郭戈. 混合动力电动汽车能量管理策略研究综述[J]. 自动化学报, 2016, 42(3):321-334.
|
|
|
|
| [6] |
张卫青. 混合动力汽车的发展现状及其关键技术[J]. 重庆理工大学学报, 2006, 20(5):19-22.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
唐小林, 郎陈佳, 郑林洋, 等. 智能网联混合动力汽车能量管理研究综述[J]. 重庆理工大学学报, 2023, 37(9):1-12.
|
|
|
|
| [10] |
|
| [11] |
邓富昌, 张校锋. 基于规则的混合型燃料电池汽车能量管理策略[J]. 青岛大学学报, 2023, 38(3):75-80.
|
|
|
|
| [12] |
|
| [13] |
丁阿鑫, 张晨阳, 沈英. 燃料电池汽车改进型状态机能量管理策略研究[J]. 机械制造与自动化, 2021, 50(2):181-204.
|
|
|
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
张彬, 邹渊, 张旭东, 等. 基于TD3-PER的混合动力履带车辆能量管理[J]. 汽车工程, 2022, 44(9):1400-1409.
|
|
|
|
| [27] |
邹渊, 张彬, 张旭东, 等. 基于归一化优势函数的强化学习混合动力履带车辆能量管理[J]. 兵工学报, 2021, 42(10):2159-2169.
|
|
doi: 10.3969/j.issn.1000-1093.2021.10.011 |
|
| [28] |
|
| [1] | 周桢林, 龙腾, 刘大卫, 孙景亮, 钟建鑫, 李俊志. 基于强化学习冲突消解的大规模无人机集群航迹规划方法[J]. 兵工学报, 2025, 46(5): 241146-. |
| [2] | 先苏杰, 王康, 曾鑫, 宋杰, 吴志林. 基于深度强化学习的落角和视场角约束制导律[J]. 兵工学报, 2025, 46(4): 240435-. |
| [3] | 孙浩, 黎海青, 梁彦, 马超雄, 吴翰. 基于知识辅助深度强化学习的巡飞弹组动态突防决策[J]. 兵工学报, 2024, 45(9): 3161-3176. |
| [4] | 董明泽, 温庄磊, 陈锡爱, 杨炅坤, 曾涛. 安全凸空间与深度强化学习结合的机器人导航方法[J]. 兵工学报, 2024, 45(12): 4372-4382. |
| [5] | 傅妍芳, 雷凯麟, 魏佳宁, 曹子建, 杨博, 王炜, 孙泽龙, 李秦洁. 基于演员-评论家框架的层次化多智能体协同决策方法[J]. 兵工学报, 2024, 45(10): 3385-3396. |
| [6] | 马也, 范文慧, 常天庆. 基于智能算法的无人集群防御作战方案优化方法[J]. 兵工学报, 2022, 43(6): 1415-1425. |
| [7] | 谭颖琦, 许景懿, 熊光明, 李子睿, 陈慧岩. 基于轨迹规划与CNN-LSTM预测的履带式混合动力无人平台能量管理优化[J]. 兵工学报, 2022, 43(11): 2738-2748. |
| [8] | 陈路明, 廖自力, 马晓军, 刘春光. 基于分层控制的混合动力车辆实时能量管理策略[J]. 兵工学报, 2021, 42(8): 1580-1591. |
| [9] | 张晚晴, 余文斌, 李静琳, 陈万春. 基于纵程解析解的飞行器智能横程机动再入协同制导[J]. 兵工学报, 2021, 42(7): 1400-1411. |
| [10] | 高昂, 董志明, 叶红兵, 宋敬华, 郭齐胜. 基于深度强化学习的巡飞弹突防控制决策[J]. 兵工学报, 2021, 42(5): 1101-1110. |
| [11] | 邹渊, 张彬, 张旭东, 赵志颖, 康铁宇, 郭玉枫, 吴喆. 基于归一化优势函数的强化学习混合动力履带车辆能量管理[J]. 兵工学报, 2021, 42(10): 2159-2169. |
| [12] | 黄大山, 张进秋, 刘义乐, 张建. 车辆馈能悬挂系统滑模控制及能量管理策略研究[J]. 兵工学报, 2016, 37(12): 2185-2195. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4