
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (7): 240710-.doi: 10.12382/bgxb.2024.0710
肖鹏1,*( ), 于海霞1, 黄龙2, 张司明1
), 于海霞1, 黄龙2, 张司明1
收稿日期:2024-08-21
上线日期:2025-08-12
通讯作者:
XIAO Peng1,*(), YU Haixia1, HUANG Long2, ZHANG Siming1
Received:2024-08-21
Online:2025-08-12
摘要:
针对经典粒子群算法在无人机三维航迹规划过程中全局搜索能力不足、易陷入局部最优等问题,研究提出一种多维增强粒子群优化算法。算法首先通过引入改善因子,在粒子寻优各个阶段实现动态调整惯性权重,提升种群适应性和克服局部最优能力;其次依靠动态约束方程实现学习因子增强,促使粒子间信息共享更为高效,改善算法自学习能力;随后有序融合混沌初始化和精英反向学习进化等策略优势,重新规划粒子群进化流程,增强粒子在迭代过程中的均衡性和多样性,提升算法收敛精度。实验中通过测试函数横向对比和复杂三维任务场景纵向应用,多维增强粒子群优化算法在新的多维目标函数指标中相较于经典粒子群算法无人机航迹规划能力获得了提升,在5种比对算法中表现出较好的有效性和竞争力。
肖鹏, 于海霞, 黄龙, 张司明. 基于MDEPSO算法的无人机三维航迹规划[J]. 兵工学报, 2025, 46(7): 240710-.
XIAO Peng, YU Haixia, HUANG Long, ZHANG Siming. 3D Path Planning of Unmanned Aerial Vehicle Based on MDEPSO Algorithm[J]. Acta Armamentarii, 2025, 46(7): 240710-.
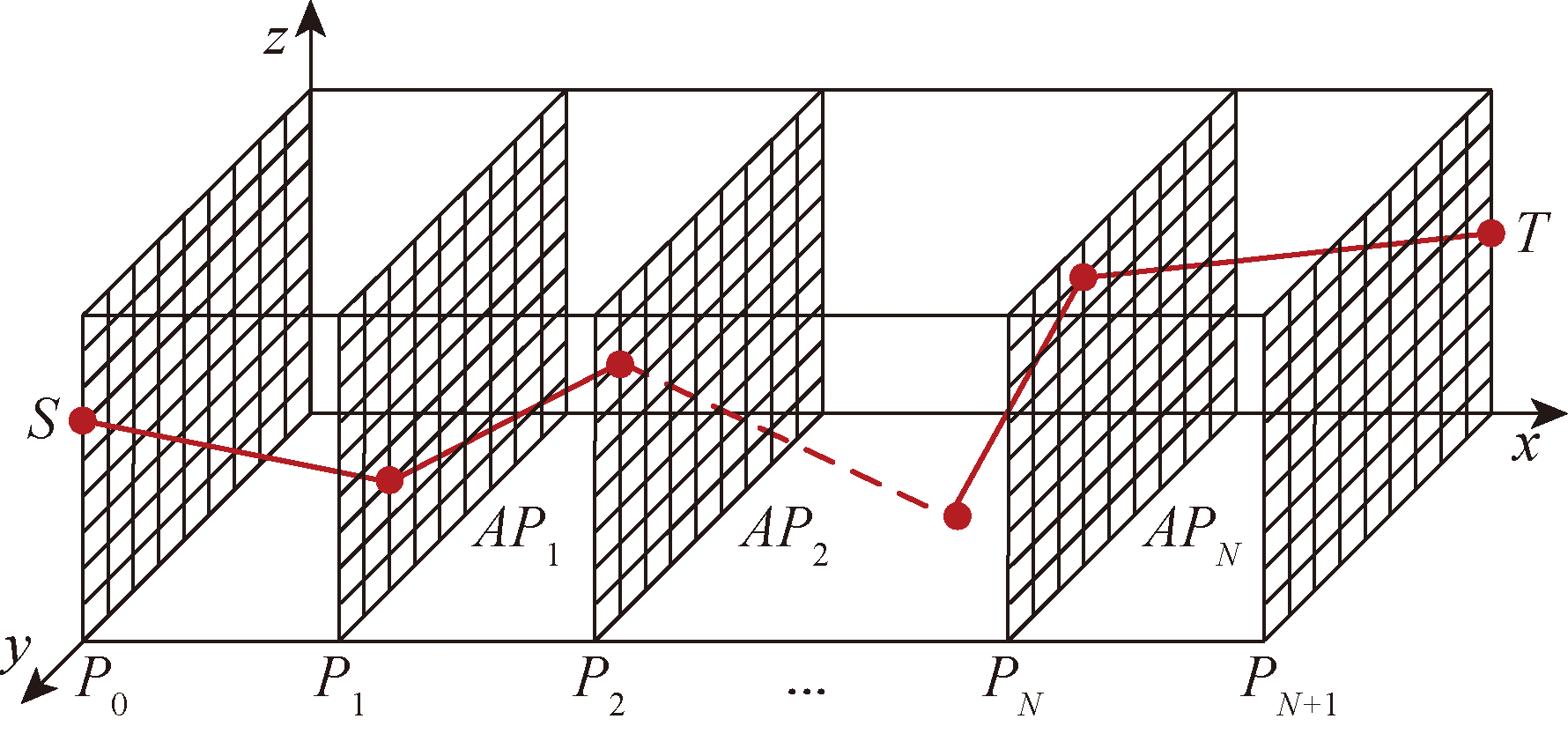
图1 栅格法环境建模示意图
Fig.1 Grid method environment modeling diagram
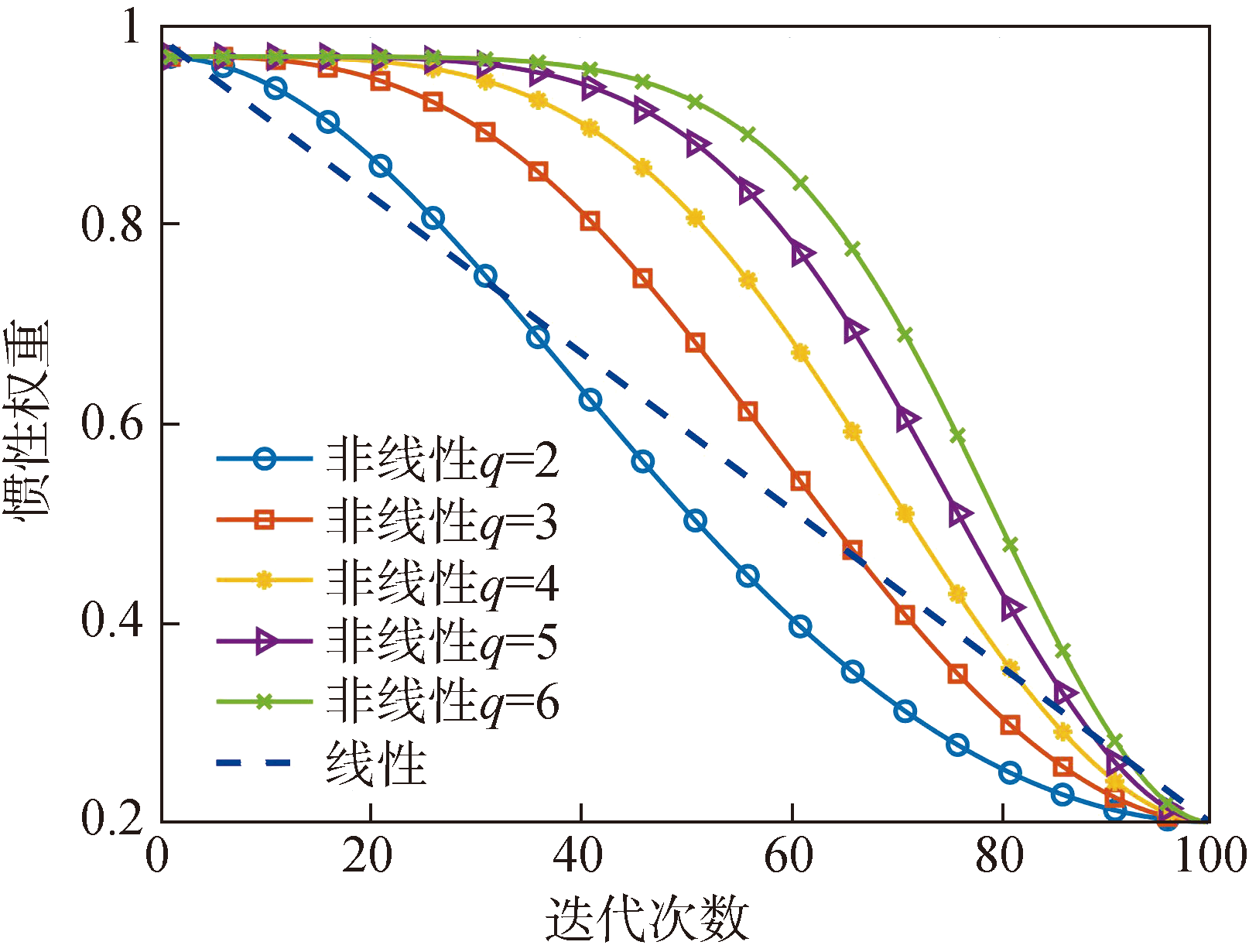
图2 惯性权重对比曲线
Fig.2 Inertia weight contrast curve
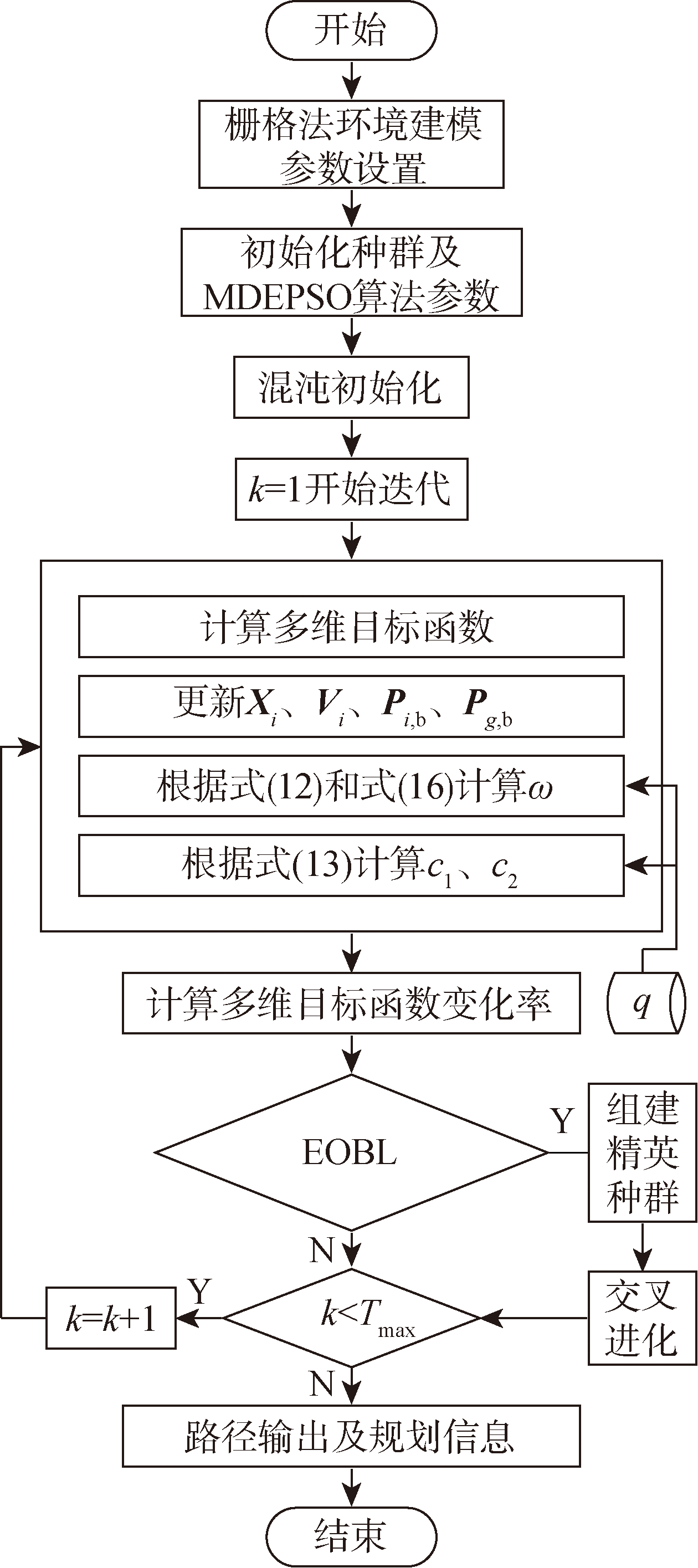
图3 MDEPSO算法流程
Fig.3 MDEPSO algorithm flow
| 表达式 | 搜索范围 | 最优解 |
|---|---|---|
| [-100,100] | 0 | |
| [-10,10] | 0 | |
| [-30,30] | 0 | |
| F4(x)=maxi{ ,1≤i≤D} | [-100,100] | 0 |
| [-600,600] | 0 | |
| [-32,32] | 0 | |
| [-50,50] | 0 | |
| [-50,50] | 0 |
表1 测试函数
Table1 Trial function
| 表达式 | 搜索范围 | 最优解 |
|---|---|---|
| [-100,100] | 0 | |
| [-10,10] | 0 | |
| [-30,30] | 0 | |
| F4(x)=maxi{ ,1≤i≤D} | [-100,100] | 0 |
| [-600,600] | 0 | |
| [-32,32] | 0 | |
| [-50,50] | 0 | |
| [-50,50] | 0 |
| 函数 | 指标 | PSO | CMOPSO | NMPSO | SSA-PSO | T-PSO | MDEPSO |
|---|---|---|---|---|---|---|---|
| F1 | Mean | 1.48×10-1 | 1.00×10-1 | 5.50×10-2 | 5.01×10-2 | 5.00×10-2 | 5.00×10-2 |
| SD | 3.02×10-1 | 2.69×10-1 | 2.24×10-1 | 2.24×10-1 | 2.24×10-1 | 2.24×10-1 | |
| F2 | Mean | 3.90×10-1 | 2.85×10-1 | 3.98×10-1 | 1.41×10-1 | 8.01×10-2 | 5.04×10-2 |
| SD | 4.25×10-1 | 3.65×10-1 | 4.17×10-1 | 2.97×10-1 | 2.44×10-1 | 2.22×10-1 | |
| F3 | Mean | 2.64×10-1 | 1.82×10-1 | 1.54×10-1 | 1.30×10-1 | 7.63×10-2 | 5.23×10-2 |
| SD | 3.55×10-1 | 3.29×10-1 | 2.82×10-1 | 2.98×10-1 | 2.30×10-1 | 2.08×10-1 | |
| F4 | Mean | 2.83×10-1 | 1.76×10-1 | 2.06×10-1 | 1.00×10-2 | 5.01×10-5 | 5.25×10-17 |
| SD | 3.86×10-1 | 3.63×10-1 | 3.50×10-1 | 4.47×10-2 | 2.24×10-4 | 2.24×10-16 | |
| F5 | Mean | 7.29×105 | 1.61×10-5 | 6.75×10-5 | 1.58×10-5 | 1.85×10-5 | 1.49×10-4 |
| SD | 3.92×10-5 | 1.12×10-5 | 2.31×10-5 | 2.48×10-5 | 3.03×10-5 | 3.58×10-4 | |
| F6 | Mean | 1.01×10-1 | 8.16×10-2 | 1.14×10-1 | 5.00×10-2 | 5.00×10-2 | 5.01×10-2 |
| SD | 2.51×10-1 | 2.39×10-1 | 2.83×10-1 | 2.24×10-1 | 2.24×10-1 | 2.24×10-1 | |
| F7 | Mean | 2.61×10-1 | 1.36×10-1 | 2.45×10-1 | 2.61×10-1 | 1.02×10-1 | 5.28×10-17 |
| SD | 3.55×10-1 | 2.83×10-1 | 3.70×10-1 | 3.67×10-1 | 2.46×10-1 | 2.24×10-16 | |
| F8 | Mean | 2.61×10-1 | 1.36×10-1 | 2.45×10-1 | 2.61×10-1 | 5.00×10-2 | 5.17×10-27 |
| SD | 3.55×10-1 | 2.83×10-1 | 3.70×10-1 | 3.67×10-1 | 2.24×10-1 | 2.24×10-26 |
表2 测试函数实验结果
Table2 Test function experiment results
| 函数 | 指标 | PSO | CMOPSO | NMPSO | SSA-PSO | T-PSO | MDEPSO |
|---|---|---|---|---|---|---|---|
| F1 | Mean | 1.48×10-1 | 1.00×10-1 | 5.50×10-2 | 5.01×10-2 | 5.00×10-2 | 5.00×10-2 |
| SD | 3.02×10-1 | 2.69×10-1 | 2.24×10-1 | 2.24×10-1 | 2.24×10-1 | 2.24×10-1 | |
| F2 | Mean | 3.90×10-1 | 2.85×10-1 | 3.98×10-1 | 1.41×10-1 | 8.01×10-2 | 5.04×10-2 |
| SD | 4.25×10-1 | 3.65×10-1 | 4.17×10-1 | 2.97×10-1 | 2.44×10-1 | 2.22×10-1 | |
| F3 | Mean | 2.64×10-1 | 1.82×10-1 | 1.54×10-1 | 1.30×10-1 | 7.63×10-2 | 5.23×10-2 |
| SD | 3.55×10-1 | 3.29×10-1 | 2.82×10-1 | 2.98×10-1 | 2.30×10-1 | 2.08×10-1 | |
| F4 | Mean | 2.83×10-1 | 1.76×10-1 | 2.06×10-1 | 1.00×10-2 | 5.01×10-5 | 5.25×10-17 |
| SD | 3.86×10-1 | 3.63×10-1 | 3.50×10-1 | 4.47×10-2 | 2.24×10-4 | 2.24×10-16 | |
| F5 | Mean | 7.29×105 | 1.61×10-5 | 6.75×10-5 | 1.58×10-5 | 1.85×10-5 | 1.49×10-4 |
| SD | 3.92×10-5 | 1.12×10-5 | 2.31×10-5 | 2.48×10-5 | 3.03×10-5 | 3.58×10-4 | |
| F6 | Mean | 1.01×10-1 | 8.16×10-2 | 1.14×10-1 | 5.00×10-2 | 5.00×10-2 | 5.01×10-2 |
| SD | 2.51×10-1 | 2.39×10-1 | 2.83×10-1 | 2.24×10-1 | 2.24×10-1 | 2.24×10-1 | |
| F7 | Mean | 2.61×10-1 | 1.36×10-1 | 2.45×10-1 | 2.61×10-1 | 1.02×10-1 | 5.28×10-17 |
| SD | 3.55×10-1 | 2.83×10-1 | 3.70×10-1 | 3.67×10-1 | 2.46×10-1 | 2.24×10-16 | |
| F8 | Mean | 2.61×10-1 | 1.36×10-1 | 2.45×10-1 | 2.61×10-1 | 5.00×10-2 | 5.17×10-27 |
| SD | 3.55×10-1 | 2.83×10-1 | 3.70×10-1 | 3.67×10-1 | 2.24×10-1 | 2.24×10-26 |
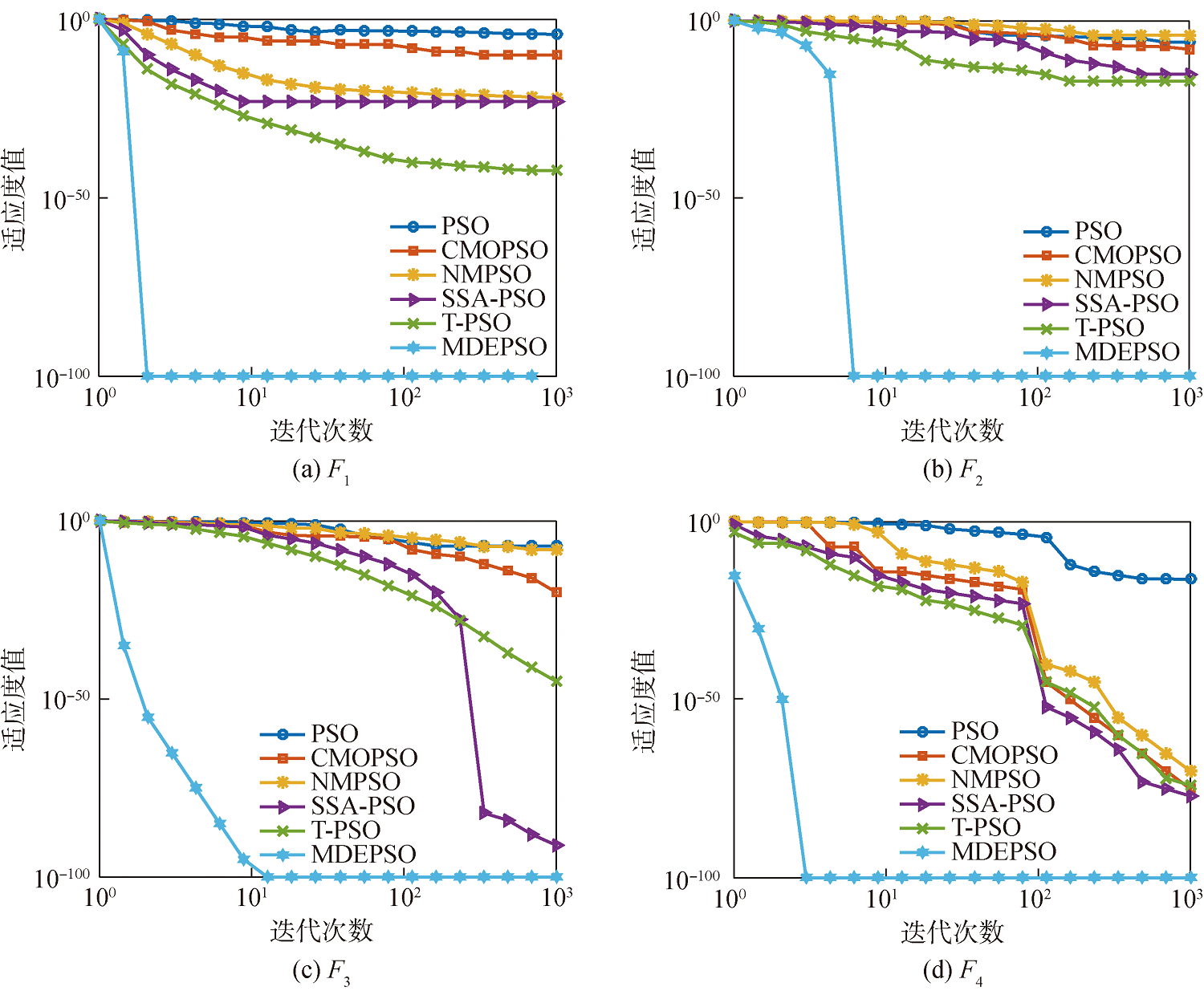
图4 单模态函数收敛曲线
Fig.4 Convergence curve of single mode function
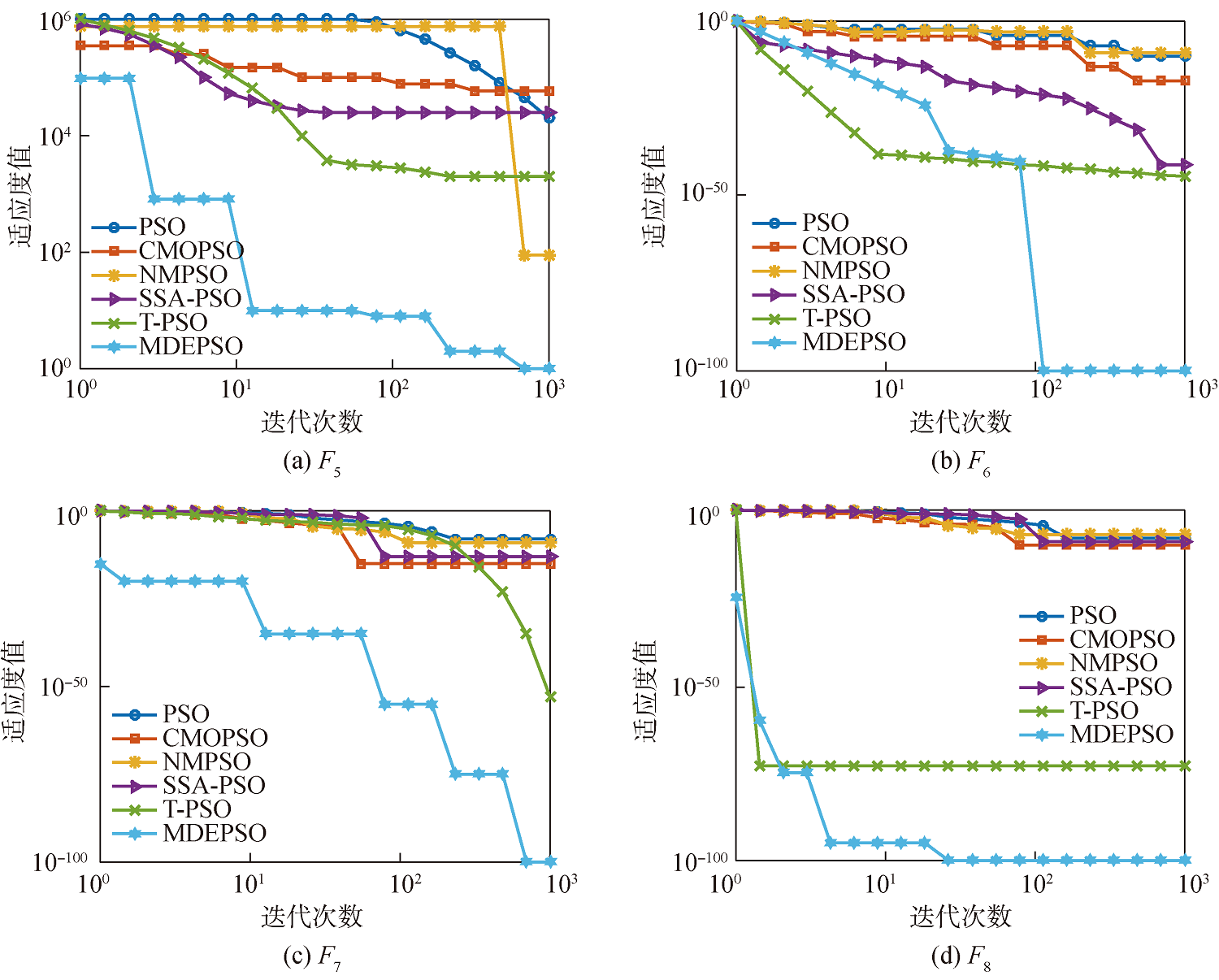
图5 多模态函数收敛曲线
Fig.5 Convergence curve of multimodal function
| 场景 名称 | 山体中 心/km | 山体坡度 衰减量 | 山体高 度/km | 雷达中 心/km | 最大探 测距 离/km | 有效探 测距 离/km |
|---|---|---|---|---|---|---|
| 场景一 | (20,40) (40,10) (40,40) | (5,8) (5,5) (6,6) | 4 5 6 | (35,9) (25,30) (11,15) | 6.6 12 7.5 | 6 10 7 |
| 场景二 | (15,35) (25,25) (40,10) | (10,10) (10,10) (5,5) | 5 5 5.5 | (38,40) (20,40) (11,15) | 6.5 6.5 8.8 | 6 6 8.6 |
| 场景三 | (13,13) (25,25) (40,40) | (8,8) (8,8) (8,8) | 4 5 5 | (38,11) (26,38) (9,35) | 9 7.5 6.5 | 8 7 6 |
| 场景四 | (15,25) (30,25) (40,25) | (10,8) (10,8) (10,8) | 5 5 5 | (40,30) (9,15) (9,40) | 9 7.5 6.5 | 8 7 6 |
表3 任务场景建模参数
Table 3 Task scenario modeling parameters
| 场景 名称 | 山体中 心/km | 山体坡度 衰减量 | 山体高 度/km | 雷达中 心/km | 最大探 测距 离/km | 有效探 测距 离/km |
|---|---|---|---|---|---|---|
| 场景一 | (20,40) (40,10) (40,40) | (5,8) (5,5) (6,6) | 4 5 6 | (35,9) (25,30) (11,15) | 6.6 12 7.5 | 6 10 7 |
| 场景二 | (15,35) (25,25) (40,10) | (10,10) (10,10) (5,5) | 5 5 5.5 | (38,40) (20,40) (11,15) | 6.5 6.5 8.8 | 6 6 8.6 |
| 场景三 | (13,13) (25,25) (40,40) | (8,8) (8,8) (8,8) | 4 5 5 | (38,11) (26,38) (9,35) | 9 7.5 6.5 | 8 7 6 |
| 场景四 | (15,25) (30,25) (40,25) | (10,8) (10,8) (10,8) | 5 5 5 | (40,30) (9,15) (9,40) | 9 7.5 6.5 | 8 7 6 |
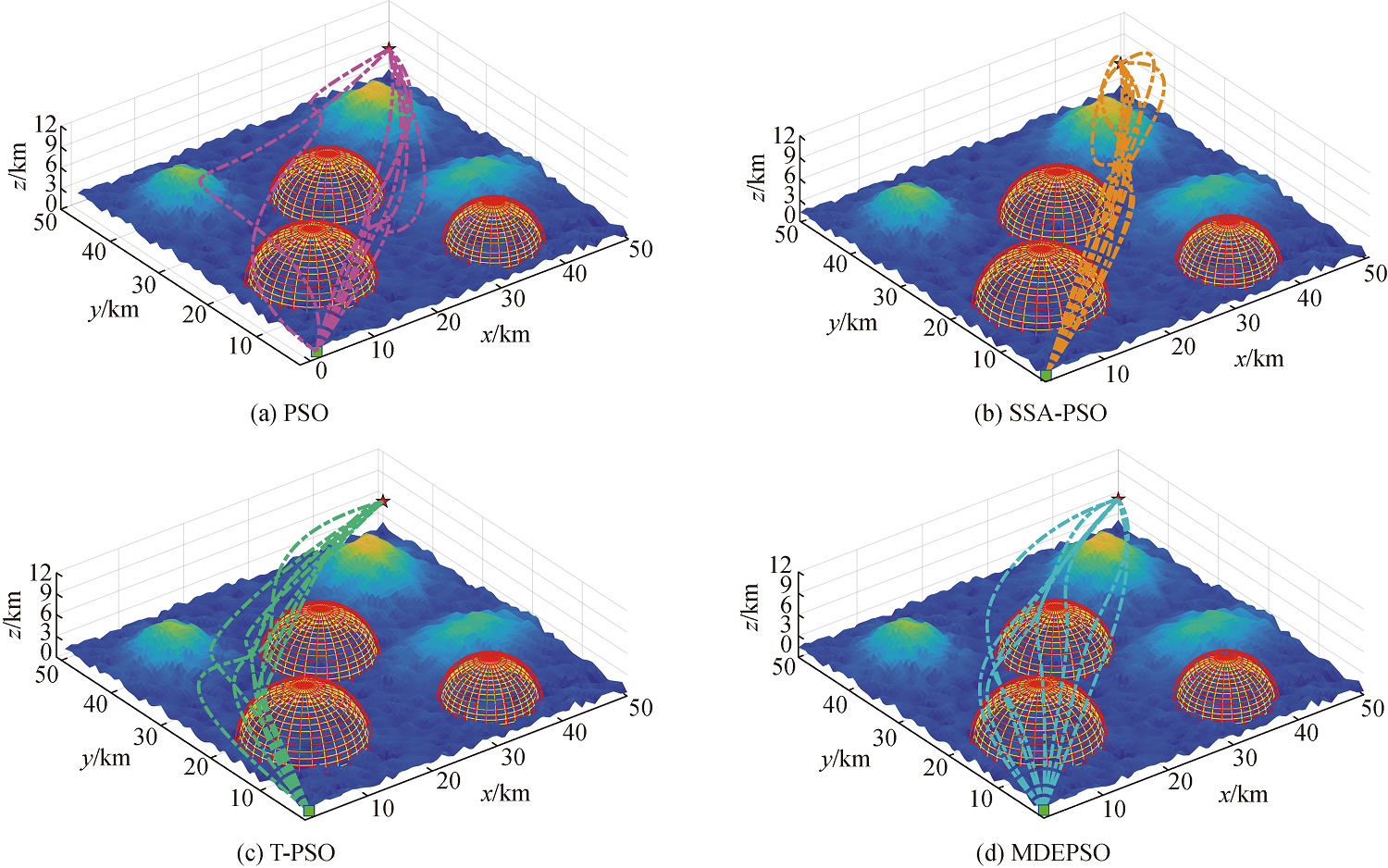
图6 场景一中各算法航迹规划过程
Fig.6 The trajectory planning process of each algorithm in scenario 1

图7 各场景最优航迹规划对比
Fig.7 Comparison of optimal flight path planning for each scenario
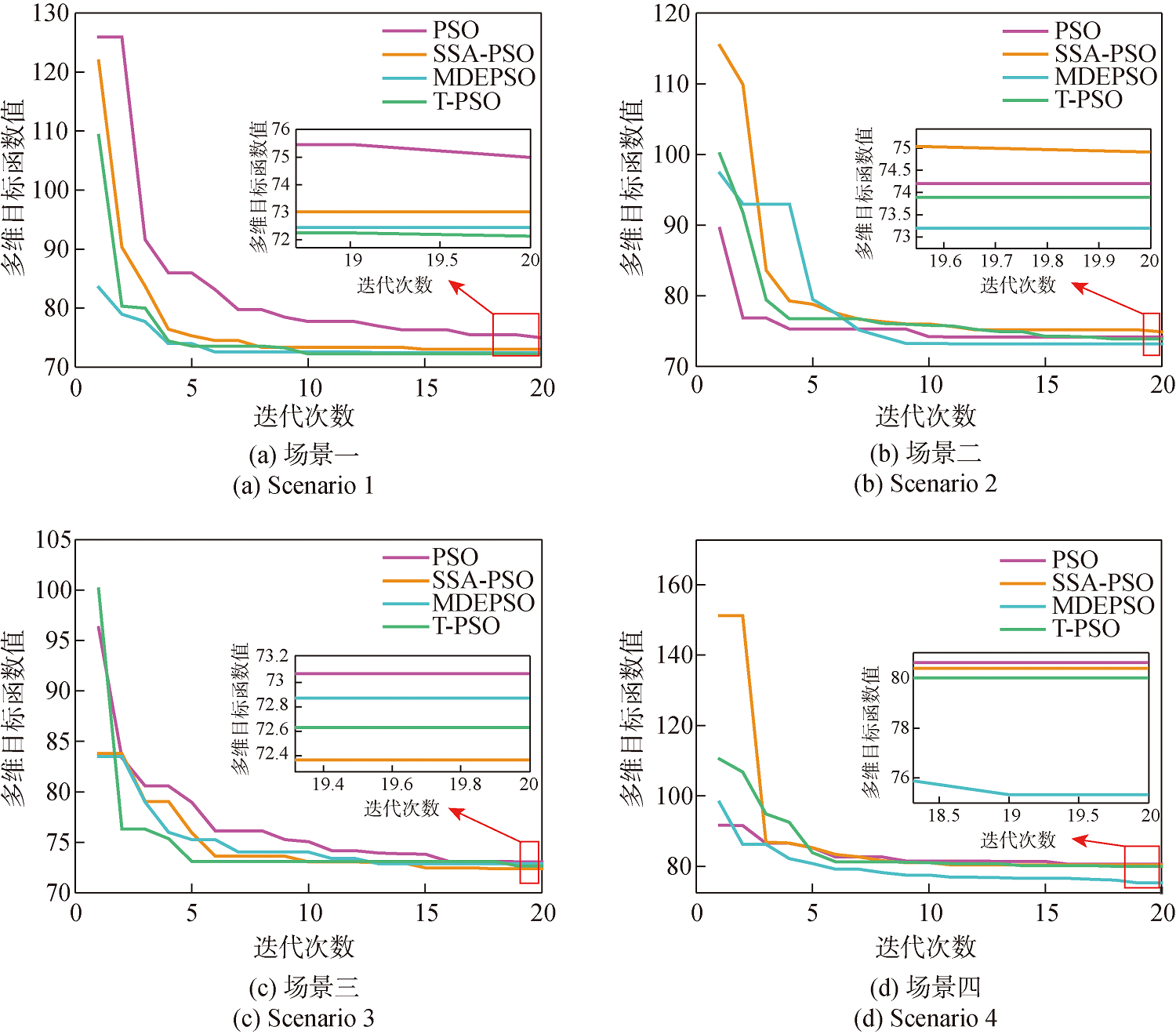
图8 各场景多维目标函数迭代曲线
Fig.8 Multidimensional objective function iteration curve of each scene
| [1] |
秦潜聪, 吴冠霖, 高原, 等. 面向战场条件的无人机集群分布式存储方法[J]. 西南交通大学学报, 2024, 59(4):942-958.
|
|
|
|
| [2] |
|
| [3] |
张海阔, 孟秀云. 基于改进RRT*算法的无人机在线航迹规划[J]. 系统工程与电子技术, 2024, 46(12):4157-4164.
doi: 10.12305/j.issn.1001-506X.2024.12.24 |
|
|
|
| [4] |
李宗刚, 韩森, 陈引娟, 等. 基于角度搜索和深度Q网络的移动机器人路径规划算法[J]. 兵工学报, 2025, 46(2):240265.
doi: 10.12382/bgxb.2024.0265 |
|
|
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
DE CARVALHO A B,
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
张志文, 刘伯威, 张继园, 等. 麻雀搜索算法-粒子群算法与快速扩展随机树算法协同优化的智能车辆路径规划[J]. 中国机械工程, 2024, 35(6):993-999,1009.
|
|
|
|
| [17] |
张睿, 李万睿, 肖勇, 等. 基于航迹规划的无人机地形辅助导航[J]. 哈尔滨工程大学学报, 2024, 45(3):459-465.
|
|
|
|
| [18] |
陈亚萍, 王楠, 洪华杰, 等. 面向多无人平台区域监视任务的信息素正向激励栅格方法[J]. 兵工学报, 2023, 44(9):2859-2870.
doi: 10.12382/bgxb.2022.0537 |
|
doi: 10.12382/bgxb.2022.0537 |
|
| [19] |
|
| [20] |
黄樊晶, 吴盘龙, 李星秀, 等. 考虑执行能力约束的多机协同目标分配AEPSO算法[J]. 宇航学报, 2024, 45(6):948-957.
|
|
|
|
| [21] |
|
| [22] |
薛阳, 燕宇铖, 贾巍, 等. 基于改进灰狼算法优化长短期记忆网络的光伏功率预测[J]. 太阳能学报, 2023, 44(7):207-213.
doi: 10.19912/j.0254-0096.tynxb.2022-0320 |
|
doi: 10.19912/j.0254-0096.tynxb.2022-0320 |
| [1] | 沈英, 张硕, 王舒, 苏云, 薛芳, 黄峰. 复杂场景伪装小目标机载偏振遥感检测方法[J]. 兵工学报, 2025, 46(7): 240797-. |
| [2] | 徐扬, 魏超, 冯付勇, 胡乐云. 基于时空解耦规划方法的无人机自主降落策略[J]. 兵工学报, 2025, 46(7): 240653-. |
| [3] | 王伟翰, 高铭泽, 施小龙, 胡诗苑, 吴沿江, 陈慧敏. 机载线阵激光雷达动态成像建模与验证[J]. 兵工学报, 2025, 46(6): 240836-. |
| [4] | 闫啸家, 朱惠民, 孙世岩, 石章松, 姜尚. 基于改进变异萤火虫优化粒子滤波的无人机目标定位[J]. 兵工学报, 2025, 46(5): 240549-. |
| [5] | 周桢林, 龙腾, 刘大卫, 孙景亮, 钟建鑫, 李俊志. 基于强化学习冲突消解的大规模无人机集群航迹规划方法[J]. 兵工学报, 2025, 46(5): 241146-. |
| [6] | 贠彦直, 孟庆微, 王西康, 王晗. 基于2D-HCE混沌加密的动态 DL-GMPWFRFT 安全通信方法[J]. 兵工学报, 2025, 46(4): 240052-. |
| [7] | 何子琦, 李博宸, 王成罡, 宋磊. 针对区域防御的多无人机序列捕捉算法[J]. 兵工学报, 2025, 46(4): 240343-. |
| [8] | 侯天乐, 毕文豪, 黄湛钧, 李铭浩, 张安. 基于事件触发的多智能体系统预设时间编队控制[J]. 兵工学报, 2025, 46(4): 240292-. |
| [9] | 李雅轩, 刘新福. 基于精确凸松弛的固定翼无人机实时轨迹规划[J]. 兵工学报, 2025, 46(3): 240362-. |
| [10] | 曾照洋, 彭文胜, 李云凯, 徐明. 智能无人机集群可靠性技术内涵、发展及挑战[J]. 兵工学报, 2025, 46(3): 240322-. |
| [11] | 刘聪, 李百庆, 张宗卫, 单泽众. 水平来流作用下无人机旋翼多维气动特征研究[J]. 兵工学报, 2025, 46(3): 240316-. |
| [12] | 张奉林, 董轶昊, 辛建社, 郭丽萍, 谷雪晨, 曲家琦. 基于粒子群的小型无人机低过载压缩空气发射参数选择和优化算法[J]. 兵工学报, 2025, 46(2): 240014-. |
| [13] | 杨绪祺, 谭启凡, 苏航, 谭浩. 面向无人机视觉制导的自适应目标跟踪方法[J]. 兵工学报, 2025, 46(2): 240284-. |
| [14] | 侯鹏, 葛玉雪, 裴扬, 岳源, 艾俊强. 基于毁伤评估结果的无人机对地攻击任务分配方法[J]. 兵工学报, 2025, 46(2): 240212-. |
| [15] | 孙海文, 韩啸, 陈婷, 李丹, 李烨, 靳子荣. 无人机蜂群攻击意图判断方法研究[J]. 兵工学报, 2024, 45(S2): 25-35. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4