
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (7): 240797-.doi: 10.12382/bgxb.2024.0797
沈英1, 张硕1, 王舒1, 苏云2, 薛芳2, 黄峰1,*( )
)
收稿日期:2024-09-04
上线日期:2025-08-12
通讯作者:
基金资助:
SHEN Ying1, ZHANG Shuo1, WANG Shu1, SU Yun2, XUE Fang2, HUANG Feng1,*()
Received:2024-09-04
Online:2025-08-12
摘要:
无人机遥感探测在军事侦察领域发挥着重要作用,偏振探测利用偏振光与物体相互作用产生的偏振变化来提高目标对比度。然而在复杂场景下,伪装小目标与背景特征差异较小且空间信息不足,存在检测困难的问题。为此提出一种偏振伪装小目标检测算法(Polarization Camouflaged Small Object Detection-YOLO,PCSOD-YOLO),设计了高效层注意力模块-坐标注意力特征提取模块和空间金字塔池化跨阶段局部通道-3D权重注意力感受野模块,捕获目标的偏振特征和语义信息,增强上下文信息理解能力;设计了动态小目标检测头,通过动态卷积增强对小目标特征提取能力的同时,利用不同尺度的特征信息,联合多通道特征信息输出小目标检测结果。构建伪装小目标偏振图像数据集(Polarization Image of Camouflaged Small Objects,PICSO)。在PICSO数据集上的实验表明,所提出的方法可以有效检测伪装小目标,mAP0.5达到92.4%,mAP0.5:0.95达到47.8%,检测速率达到60.6帧/s,满足实时性要求。
沈英, 张硕, 王舒, 苏云, 薛芳, 黄峰. 复杂场景伪装小目标机载偏振遥感检测方法[J]. 兵工学报, 2025, 46(7): 240797-.
SHEN Ying, ZHANG Shuo, WANG Shu, SU Yun, XUE Fang, HUANG Feng. A Method for Detecting the Camouflaged Small Target in Complex Scene Using Airborne Polarization Remote Sensing[J]. Acta Armamentarii, 2025, 46(7): 240797-.

图1 PCSOD-YOLO网络整体架构
Fig.1 Overall Architecture of PCSOD-YOLO network
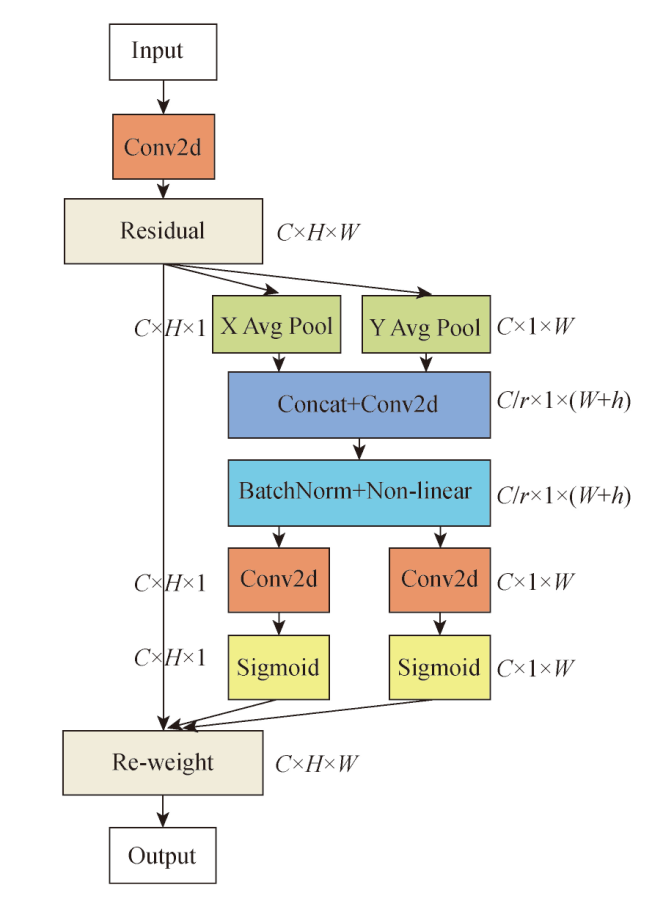
图2 位置感知坐标卷积CAConv2d
Fig.2 Structure diagram of position-aware coordinate convolution CAConv2d
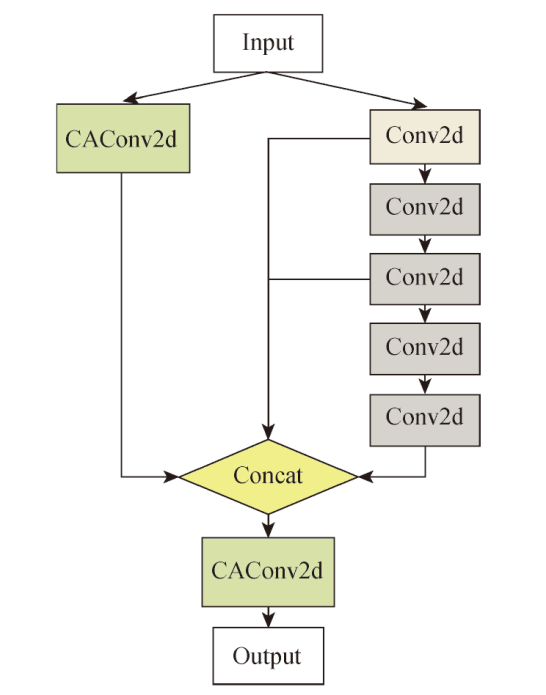
图3 高效特征提取模块ELAM-CA结构图
Fig.3 Structure diagram of efficient feature extraction module ELAM-CA
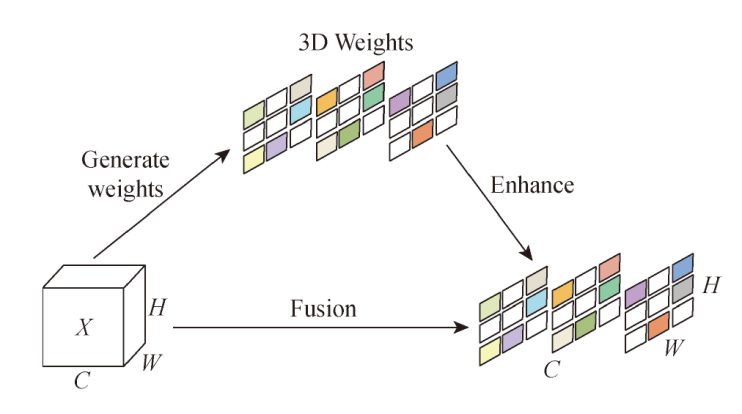
图4 SimAM注意力机制结构图
Fig.4 Structure diagram of SimAM attention mechanism
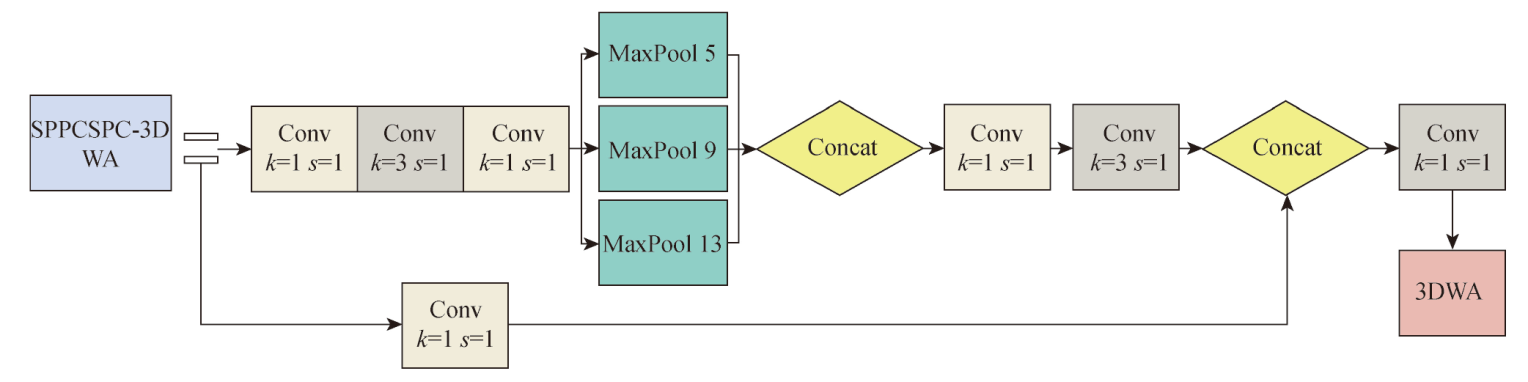
图5 感受野模块结构图
Fig.5 Structure diagram of receptive field module
图6 全维动态卷积处理过程
Fig.6 Processing of full-dimensional dynamic convolution
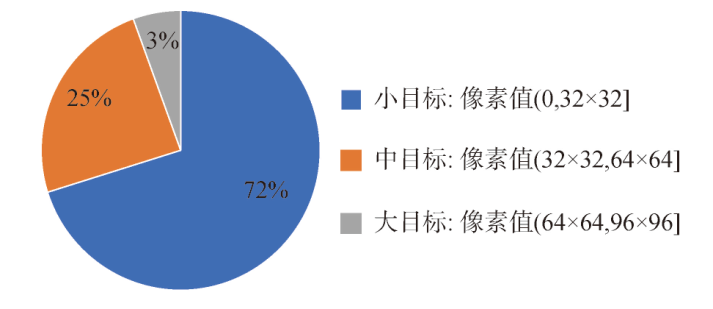
图7 PICSO数据集大、中、小目标数量分布占比图
Fig.7 Distribution ratio of the number of large,medium, and small targets in the PICSO dataset
| 目标类别 | 训练集 | 验证集 | 测试集 |
|---|---|---|---|
| Military vehicle I | 1127 | 140 | 145 |
| Missile vehicle II | 241 | 28 | 30 |
| Camouflage board | 554 | 73 | 55 |
| Jeep | 253 | 36 | 34 |
| Person | 431 | 48 | 55 |
表1 偏振伪装小目标数据集
Table 1 Polarization camouflaged small target dataset
| 目标类别 | 训练集 | 验证集 | 测试集 |
|---|---|---|---|
| Military vehicle I | 1127 | 140 | 145 |
| Missile vehicle II | 241 | 28 | 30 |
| Camouflage board | 554 | 73 | 55 |
| Jeep | 253 | 36 | 34 |
| Person | 431 | 48 | 55 |
| 探测角 度/(°) | S0图像 | DoLp图像 | Is图像 | 偏振编码图像 | 局部放大图 |
|---|---|---|---|---|---|
| 45 | | | | | |
| 90 | | | | | |
表2 同一目标在不同成像条件下的对比图
Table 2 Comparison of the same target under different imaging conditions
| 探测角 度/(°) | S0图像 | DoLp图像 | Is图像 | 偏振编码图像 | 局部放大图 |
|---|---|---|---|---|---|
| 45 | | | | | |
| 90 | | | | | |
| 高度/m | 军事车辆Ⅰ | 军事车辆Ⅱ | 伪装板 | 吉普车 | 伪装人 |
|---|---|---|---|---|---|
| H30 | | | | | |
| H50 | | | | | |
| H70 | | | | | |
表3 伪装小目标偏振编码图像
Table 3 Polarization encoded images of camouflaged small target
| 高度/m | 军事车辆Ⅰ | 军事车辆Ⅱ | 伪装板 | 吉普车 | 伪装人 |
|---|---|---|---|---|---|
| H30 | | | | | |
| H50 | | | | | |
| H70 | | | | | |
| 网络结构 | mAP0.5/% | mAP0.5:0.95/% | FPS/(帧/s) |
|---|---|---|---|
| FCOS | 47.5 | 18.6 | 53.1 |
| YOLOV5 | 77.9 | 30.6 | 74.4 |
| YOLOX | 79.5 | 31.9 | 69.7 |
| YOLOV7 | 84.7 | 42.8 | 76.9 |
| YOLOV8 | 87.7 | 34.8 | 108.0 |
| PCSOD-YOLO | 92.4 | 47.8 | 60.6 |
表4 不同模型检测结果对比
Table 4 Comparison of test results of different models
| 网络结构 | mAP0.5/% | mAP0.5:0.95/% | FPS/(帧/s) |
|---|---|---|---|
| FCOS | 47.5 | 18.6 | 53.1 |
| YOLOV5 | 77.9 | 30.6 | 74.4 |
| YOLOX | 79.5 | 31.9 | 69.7 |
| YOLOV7 | 84.7 | 42.8 | 76.9 |
| YOLOV8 | 87.7 | 34.8 | 108.0 |
| PCSOD-YOLO | 92.4 | 47.8 | 60.6 |
| 目标类型 | FCOS | YOLOV5 | YOLOX | YOLOV7 | YOLOV8 | PCSOD-YOLO |
|---|---|---|---|---|---|---|
| 军事 车辆Ⅰ | | | | | | |
| 军事 车辆Ⅱ | | | | | | |
| 伪装板 | | | | | | |
| 伪装人 | | | | | | |
| 吉普车 | | | | | | |
表5 高度30m时不同模型的部分检测结果局部放大展示
Table 5 Partial enlarged views of the detection results of different models at height of 30m
| 目标类型 | FCOS | YOLOV5 | YOLOX | YOLOV7 | YOLOV8 | PCSOD-YOLO |
|---|---|---|---|---|---|---|
| 军事 车辆Ⅰ | | | | | | |
| 军事 车辆Ⅱ | | | | | | |
| 伪装板 | | | | | | |
| 伪装人 | | | | | | |
| 吉普车 | | | | | | |
| 目标类型 | FCOS | YOLOV5 | YOLOX | YOLOV7 | YOLOV8 | PCSOD-YOLO |
|---|---|---|---|---|---|---|
| 军事 车辆Ⅰ | | | | | | |
| 军事 车辆Ⅱ | | | | | | |
| 伪装板 | | | | | | |
| 伪装人 | | | | | | |
| 吉普车 | | | | | | |
表6 高度50m时不同模型的部分检测结果局部放大展示
Table 6 Partial enlarged views of the detected results of different models at height of 50m
| 目标类型 | FCOS | YOLOV5 | YOLOX | YOLOV7 | YOLOV8 | PCSOD-YOLO |
|---|---|---|---|---|---|---|
| 军事 车辆Ⅰ | | | | | | |
| 军事 车辆Ⅱ | | | | | | |
| 伪装板 | | | | | | |
| 伪装人 | | | | | | |
| 吉普车 | | | | | | |
| 目标类型 | FCOS | YOLOV5 | YOLOX | YOLOV7 | YOLOV8 | PCSOD-YOLO |
|---|---|---|---|---|---|---|
| 军事 车辆Ⅰ | | | | | | |
| 军事 车辆Ⅱ | | | | | | |
| 伪装板 | | | | | | |
| 伪装人 | | | | | | |
| 吉普车 | | | | | | |
表7 高度70m时不同模型的部分检测结果局部放大展示
Table 7 Partial enlarged views of the detected results of different models at height of 70m
| 目标类型 | FCOS | YOLOV5 | YOLOX | YOLOV7 | YOLOV8 | PCSOD-YOLO |
|---|---|---|---|---|---|---|
| 军事 车辆Ⅰ | | | | | | |
| 军事 车辆Ⅱ | | | | | | |
| 伪装板 | | | | | | |
| 伪装人 | | | | | | |
| 吉普车 | | | | | | |
| 序 号 | 预训练 权重 | 小目标 检测头 | 特征提 取模块 | 感受野 模块 | mAP0.5/ % | 参数量/ MB |
|---|---|---|---|---|---|---|
| 1 | √ | 84.7 | 36.5 | |||
| 2 | √ | √ | 87.4 | 36.5 | ||
| 3 | √ | √ | 89.3 | 36.7 | ||
| 4 | √ | √ | 89.2 | 37.0 | ||
| 5 | √ | √ | √ | 90.9 | 37.2 | |
| 6 | √ | √ | √ | 91.0 | 37.0 | |
| 7 | √ | √ | √ | 91.6 | 36.5 | |
| 8 | √ | √ | √ | √ | 92.4 | 37.2 |
表8 消融实验结果
Table 8 Results of ablation experiment
| 序 号 | 预训练 权重 | 小目标 检测头 | 特征提 取模块 | 感受野 模块 | mAP0.5/ % | 参数量/ MB |
|---|---|---|---|---|---|---|
| 1 | √ | 84.7 | 36.5 | |||
| 2 | √ | √ | 87.4 | 36.5 | ||
| 3 | √ | √ | 89.3 | 36.7 | ||
| 4 | √ | √ | 89.2 | 37.0 | ||
| 5 | √ | √ | √ | 90.9 | 37.2 | |
| 6 | √ | √ | √ | 91.0 | 37.0 | |
| 7 | √ | √ | √ | 91.6 | 36.5 | |
| 8 | √ | √ | √ | √ | 92.4 | 37.2 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
胡焱, 原子昊, 涂晓光, 等. 基于对比学习的改进SSD目标检测算法[J]. 红外技术, 2024, 46(5):548-555.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
肖振久, 张杰浩, 林渤翰. 特征协同与细粒度感知的遥感图像小目标检测[J]. 光电工程, 2024, 51(6):52-65.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
郭永红, 牛海涛, 史超, 等. 基于卷积和注意力机制的小样本目标检测[J]. 兵工学报, 2023, 44(11):3508-3515.
doi: 10.12382/bgxb.2022.1167 |
|
doi: 10.12382/bgxb.2022.1167 |
|
| [18] |
|
| [19] |
doi: 10.1364/OE.390385 pmid: 32403811 |
| [20] |
|
| [21] |
沈英, 刘贤财, 王舒, 等. 基于偏振编码图像的低空伪装目标实时检测[J]. 兵工学报, 2024, 45(5):1374-1383.
doi: 10.12382/bgxb.2022.1289 |
|
doi: 10.12382/bgxb.2022.1289 |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
惠康华, 杨卫, 刘浩翰, 等. 基于YOLOv5的增强多尺度目标检测方法[J]. 兵工学报, 2023, 44(9):2600-2610.
doi: 10.12382/bgxb.2022.1147 |
|
|
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [1] | 肖鹏, 于海霞, 黄龙, 张司明. 基于MDEPSO算法的无人机三维航迹规划[J]. 兵工学报, 2025, 46(7): 240710-. |
| [2] | 徐扬, 魏超, 冯付勇, 胡乐云. 基于时空解耦规划方法的无人机自主降落策略[J]. 兵工学报, 2025, 46(7): 240653-. |
| [3] | 秦月梅, 陈重, 杨衍波, 李淑英. 基于深度学习的联合等式状态约束辨识与递推滤波[J]. 兵工学报, 2025, 46(6): 240578-. |
| [4] | 王伟翰, 高铭泽, 施小龙, 胡诗苑, 吴沿江, 陈慧敏. 机载线阵激光雷达动态成像建模与验证[J]. 兵工学报, 2025, 46(6): 240836-. |
| [5] | 孙世岩, 李琳, 朱惠民, 石章松, 梁伟阁. 基于IFPRM-SBLFS深度学习的飞行模式智能识别方法[J]. 兵工学报, 2025, 46(5): 240893-. |
| [6] | 闫啸家, 朱惠民, 孙世岩, 石章松, 姜尚. 基于改进变异萤火虫优化粒子滤波的无人机目标定位[J]. 兵工学报, 2025, 46(5): 240549-. |
| [7] | 周桢林, 龙腾, 刘大卫, 孙景亮, 钟建鑫, 李俊志. 基于强化学习冲突消解的大规模无人机集群航迹规划方法[J]. 兵工学报, 2025, 46(5): 241146-. |
| [8] | 何子琦, 李博宸, 王成罡, 宋磊. 针对区域防御的多无人机序列捕捉算法[J]. 兵工学报, 2025, 46(4): 240343-. |
| [9] | 侯天乐, 毕文豪, 黄湛钧, 李铭浩, 张安. 基于事件触发的多智能体系统预设时间编队控制[J]. 兵工学报, 2025, 46(4): 240292-. |
| [10] | 李雅轩, 刘新福. 基于精确凸松弛的固定翼无人机实时轨迹规划[J]. 兵工学报, 2025, 46(3): 240362-. |
| [11] | 曾照洋, 彭文胜, 李云凯, 徐明. 智能无人机集群可靠性技术内涵、发展及挑战[J]. 兵工学报, 2025, 46(3): 240322-. |
| [12] | 刘聪, 李百庆, 张宗卫, 单泽众. 水平来流作用下无人机旋翼多维气动特征研究[J]. 兵工学报, 2025, 46(3): 240316-. |
| [13] | 张奉林, 董轶昊, 辛建社, 郭丽萍, 谷雪晨, 曲家琦. 基于粒子群的小型无人机低过载压缩空气发射参数选择和优化算法[J]. 兵工学报, 2025, 46(2): 240014-. |
| [14] | 杨绪祺, 谭启凡, 苏航, 谭浩. 面向无人机视觉制导的自适应目标跟踪方法[J]. 兵工学报, 2025, 46(2): 240284-. |
| [15] | 侯鹏, 葛玉雪, 裴扬, 岳源, 艾俊强. 基于毁伤评估结果的无人机对地攻击任务分配方法[J]. 兵工学报, 2025, 46(2): 240212-. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4