
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (6): 240578-.doi: 10.12382/bgxb.2024.0578
秦月梅1,*( ), 陈重1, 杨衍波2,3, 李淑英1
), 陈重1, 杨衍波2,3, 李淑英1
收稿日期:2024-07-12
上线日期:2025-06-28
通讯作者:
基金资助:
QIN Yuemei1,*(), CHEN Zhong1, YANG Yanbo2,3, LI Shuying1
Received:2024-07-12
Online:2025-06-28
摘要:
针对等式约束跟踪系统中多约束并存且当前约束信息不确定下状态估计问题,提出基于深度学习的联合等式状态约束辨识与递推滤波算法。利用门控循环单元构建约束判别网络,借助雷达量测实现当前时刻等式状态约束的在线辨识;在递推滤波框架下基于级联门控循环单元构建增益学习网络,实现概率模型与数据学习联合驱动的目标状态自适应估计;通过滤波投影联合约束判别网络辨识的约束信息和增益学习网络输出的状态估计,获得满足当前时刻等式状态约束的高精度目标状态估计。典型多道路目标跟踪实验结果表明:新算法相比卡尔曼滤波、交互式多模型(基于不同运动模型构建模式集/不同等式状态约束构建模式集)和KalmanNet等算法,在不同量测噪声水平下具有更高的估计精度和更好的鲁棒性。
中图分类号:
秦月梅, 陈重, 杨衍波, 李淑英. 基于深度学习的联合等式状态约束辨识与递推滤波[J]. 兵工学报, 2025, 46(6): 240578-.
QIN Yuemei, CHEN Zhong, YANG Yanbo, LI Shuying. Joint State Equality Constraint Identification and Recursive Filtering Based on Deep Learning[J]. Acta Armamentarii, 2025, 46(6): 240578-.
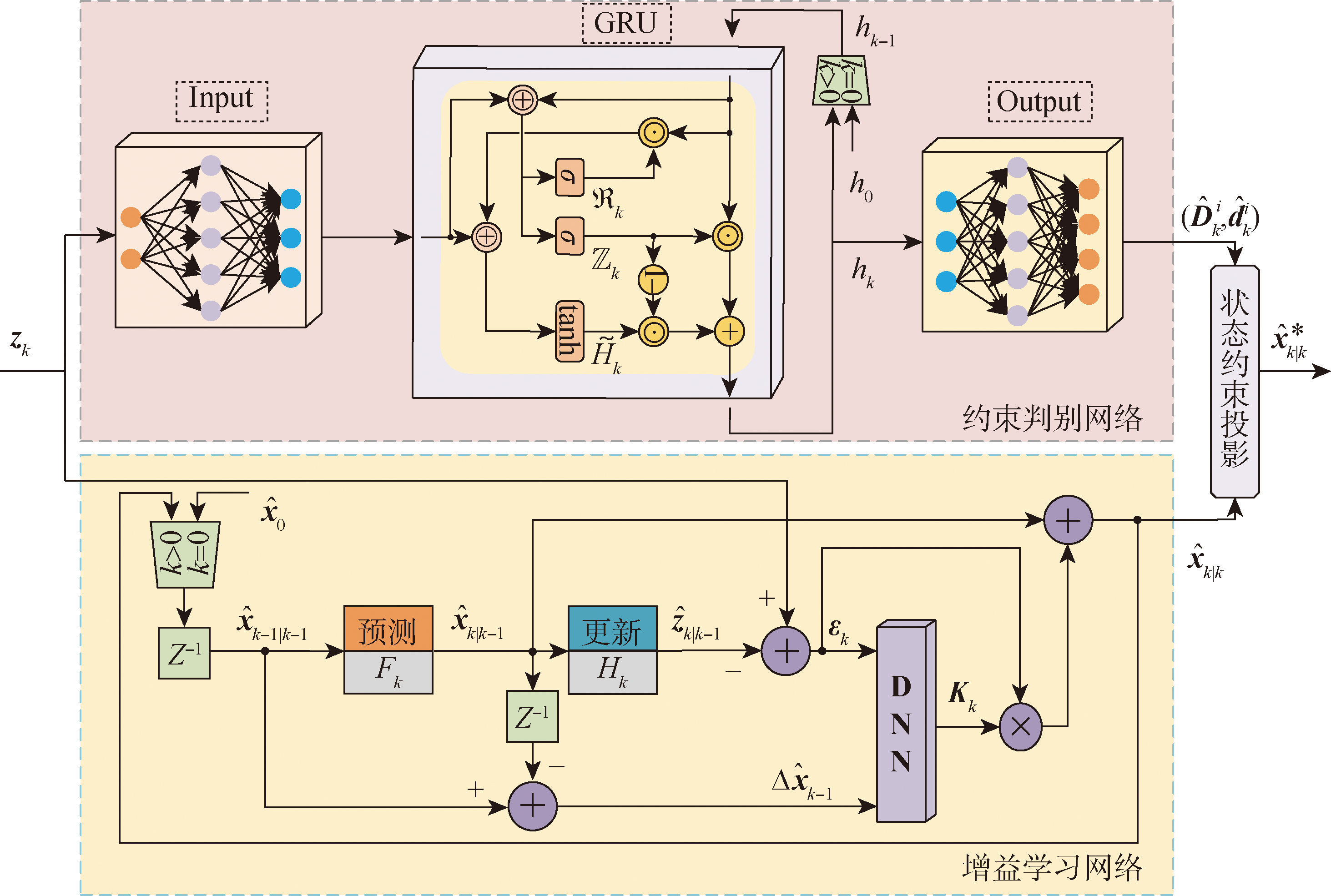
图1 DCIF的整体框图
Fig.1 Overall block diagram of DCIF
| 网络 | 输入层 | 隐含层 | 输出层 |
|---|---|---|---|
| Input | n | 16n2 | 8n2 |
| GRU | 8n2 | 4n | |
| Output | 4n | 8n2 | l |
表1 CDNet网络参数
Table 1 Network parameters of CDNet
| 网络 | 输入层 | 隐含层 | 输出层 |
|---|---|---|---|
| Input | n | 16n2 | 8n2 |
| GRU | 8n2 | 4n | |
| Output | 4n | 8n2 | l |

图2 GLNet内部DNN结构图
Fig.2 Internal DNN structure diagram of GLNet
| 网络 | 输入层 | 隐含层 | 输出层 |
|---|---|---|---|
| MLP1 | 2m2 | 16m2 | 2m2 |
| MLP2 | m | 4m | 16m |
| GRU | 2m2+16m | m2 | |
| MLP3 | m2+n2 | 8(m2+n2) | m2+n2 |
| MLP4 | n | 4n | 16n |
| GRU | m2+n2+16n | n2 | |
| MLP5 | m2+n2 | 16(m2+n2) | mn |
| MLP6 | mn+m2+n2 | 16(m2+n2) | 2m2 |
表2 GLNet内部DNN网络参数
Table 2 Internal DNN network parameters of GLNet
| 网络 | 输入层 | 隐含层 | 输出层 |
|---|---|---|---|
| MLP1 | 2m2 | 16m2 | 2m2 |
| MLP2 | m | 4m | 16m |
| GRU | 2m2+16m | m2 | |
| MLP3 | m2+n2 | 8(m2+n2) | m2+n2 |
| MLP4 | n | 4n | 16n |
| GRU | m2+n2+16n | n2 | |
| MLP5 | m2+n2 | 16(m2+n2) | mn |
| MLP6 | mn+m2+n2 | 16(m2+n2) | 2m2 |
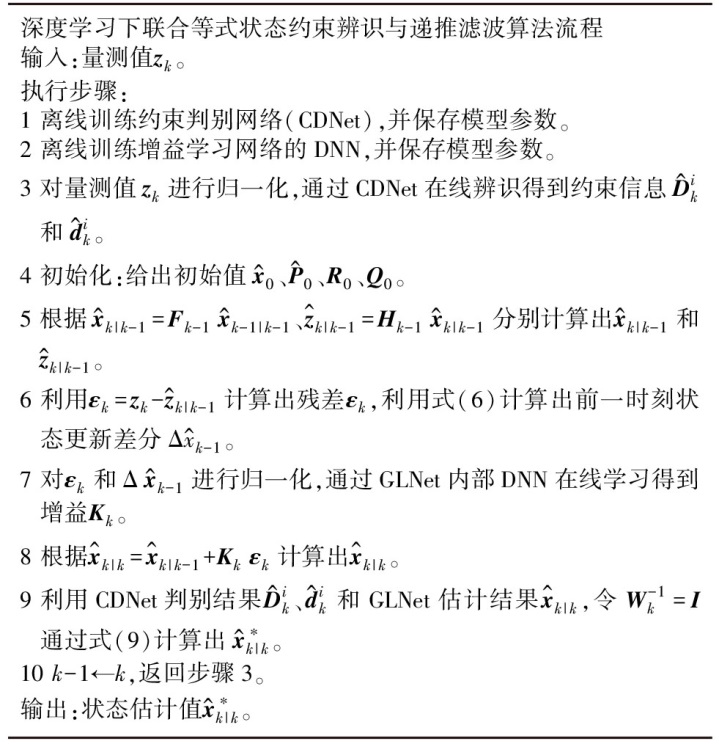
图3 DCIF算法步骤
Fig.3 Flowchart of DCIF algorithm
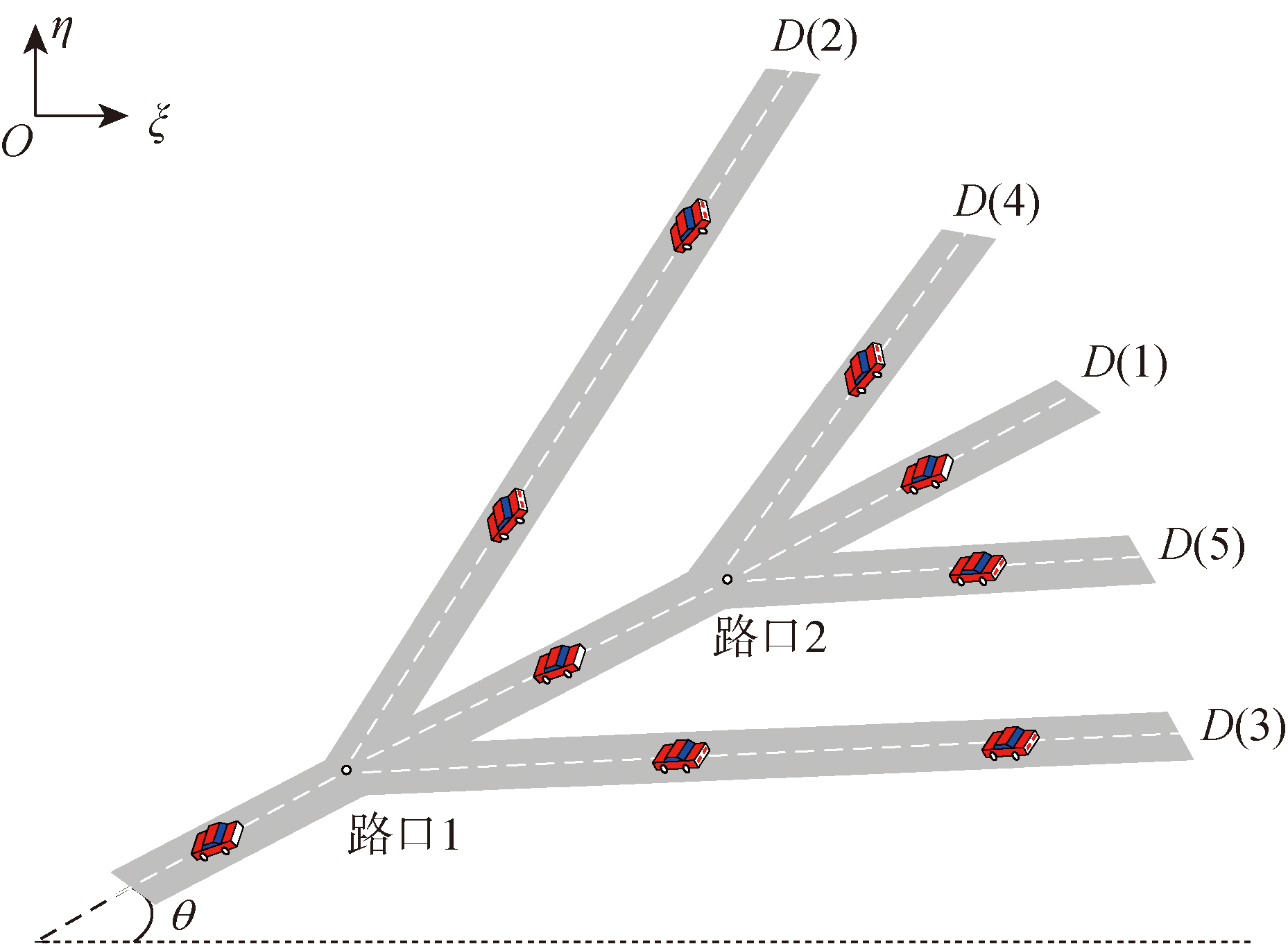
图4 多道路约束下车辆运动场景
Fig.4 Vehicle motion scenario under multiple road constraints
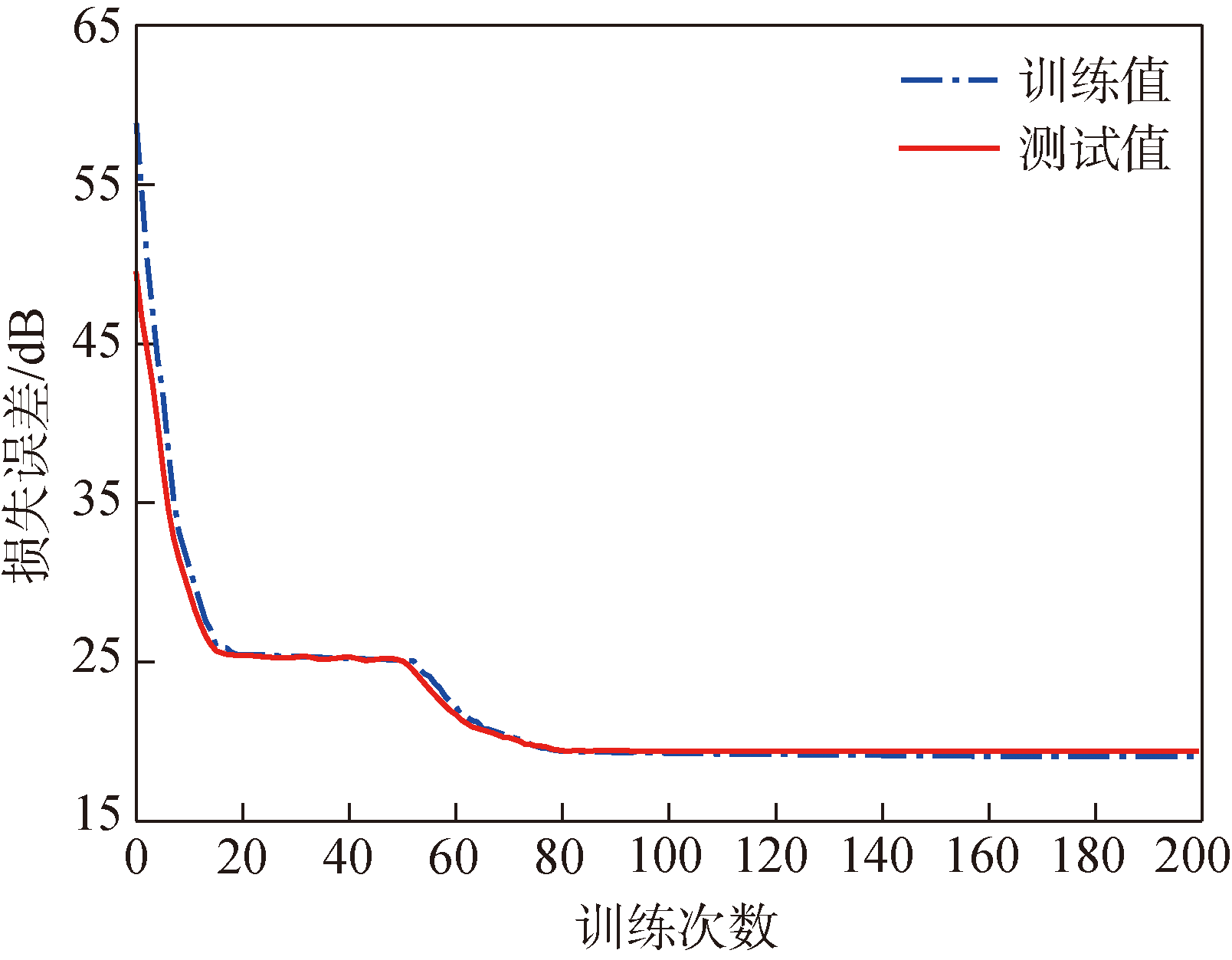
图5 CDNet损失曲线
Fig.5 Loss curves of CDNet
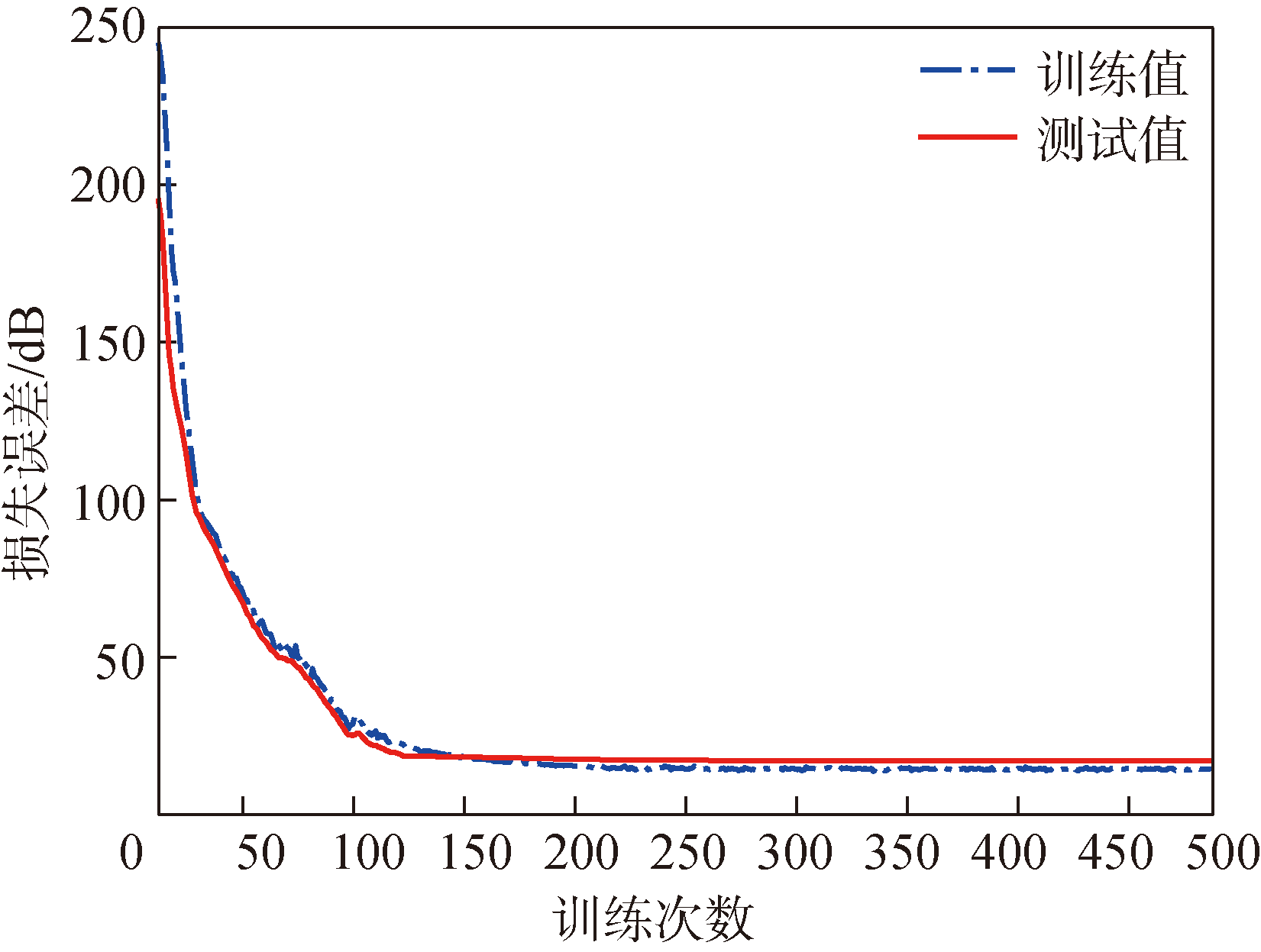
图6 GLNet损失曲线
Fig.6 Loss curves of GLNet
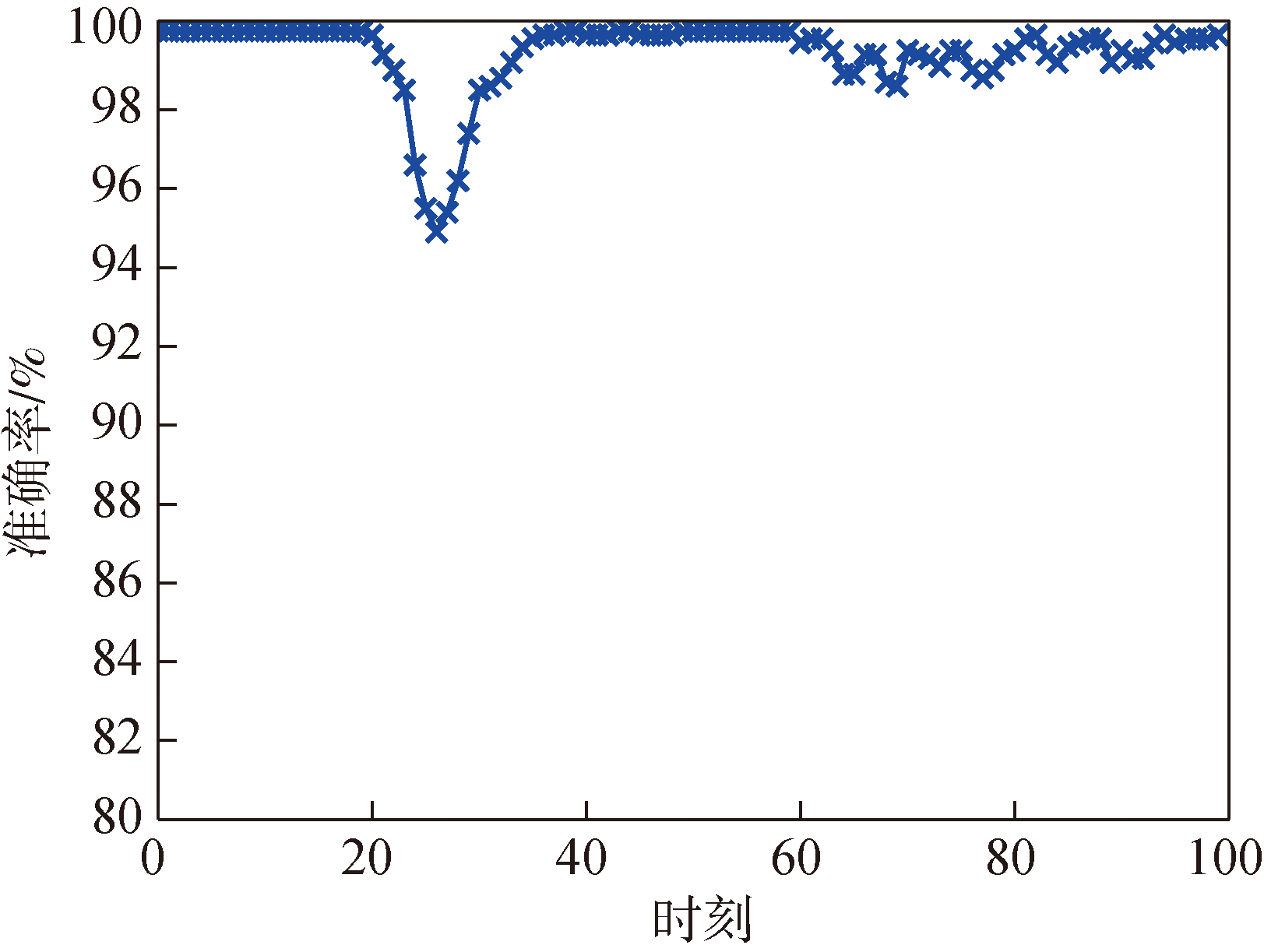
图7 CDNet辨识测试集的准确率曲线
Fig.7 Accuracy curve of CDNet identifying test set

图8 ξ轴位置的1000次蒙特卡洛仿真
Fig.8 1000 Monte Carlo simulations of ξ axis position
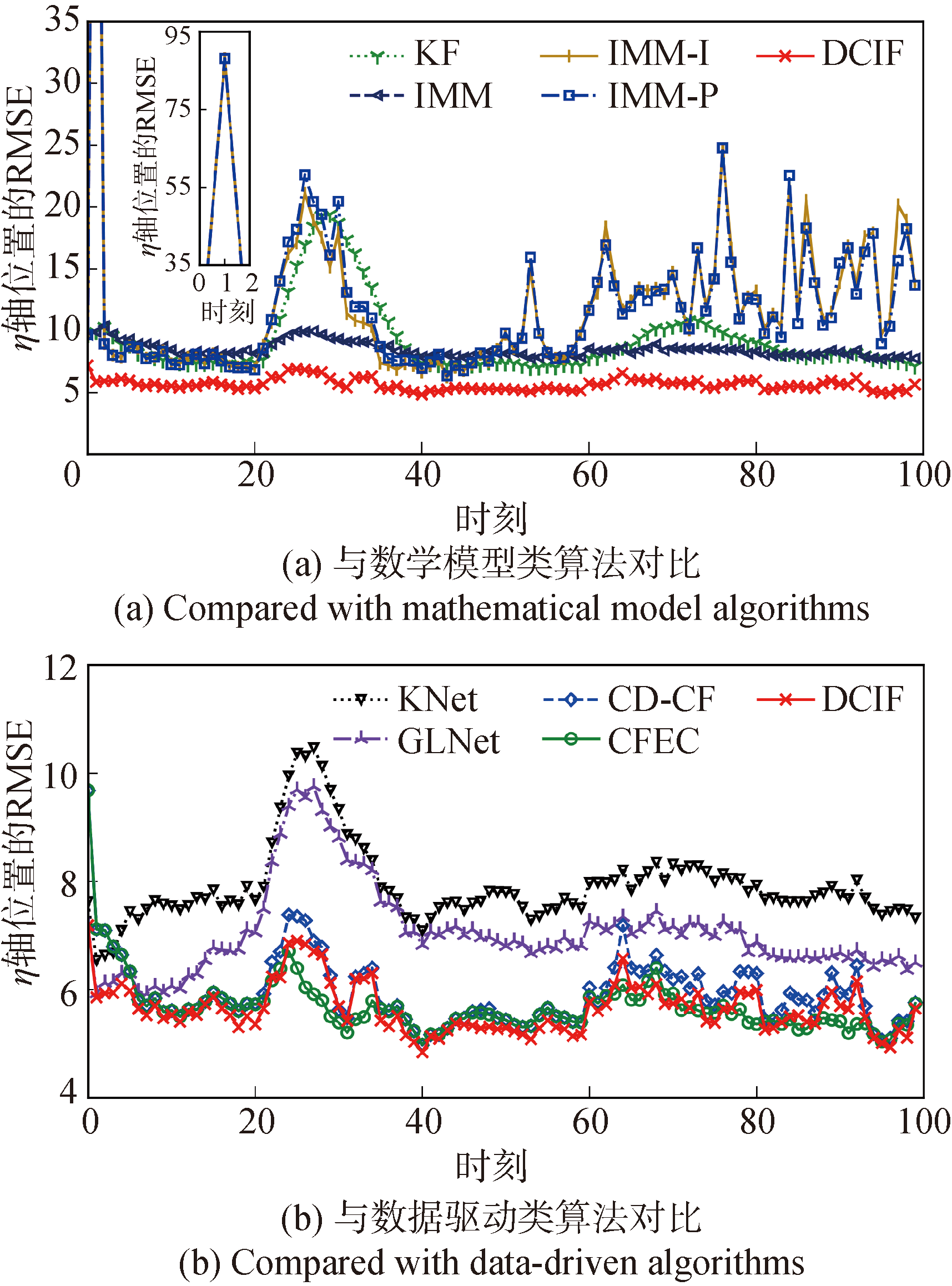
图9 η轴位置的1000次蒙特卡洛仿真
Fig.9 1000 Monte Carlo simulations of η axis position
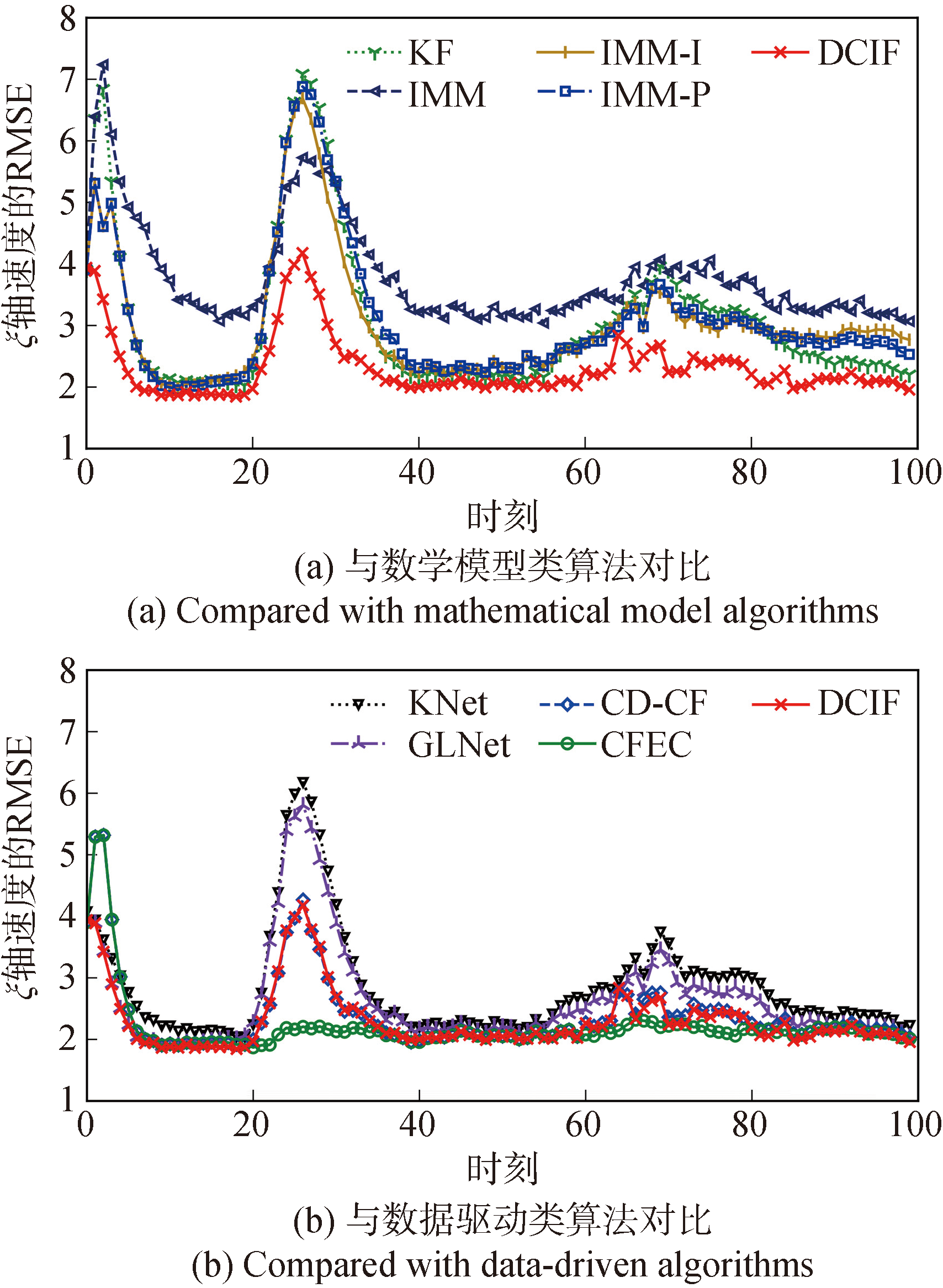
图10 ξ轴速度的1000次蒙特卡洛仿真
Fig.10 1000 Monte Carlo simulations of ξ axis velocity
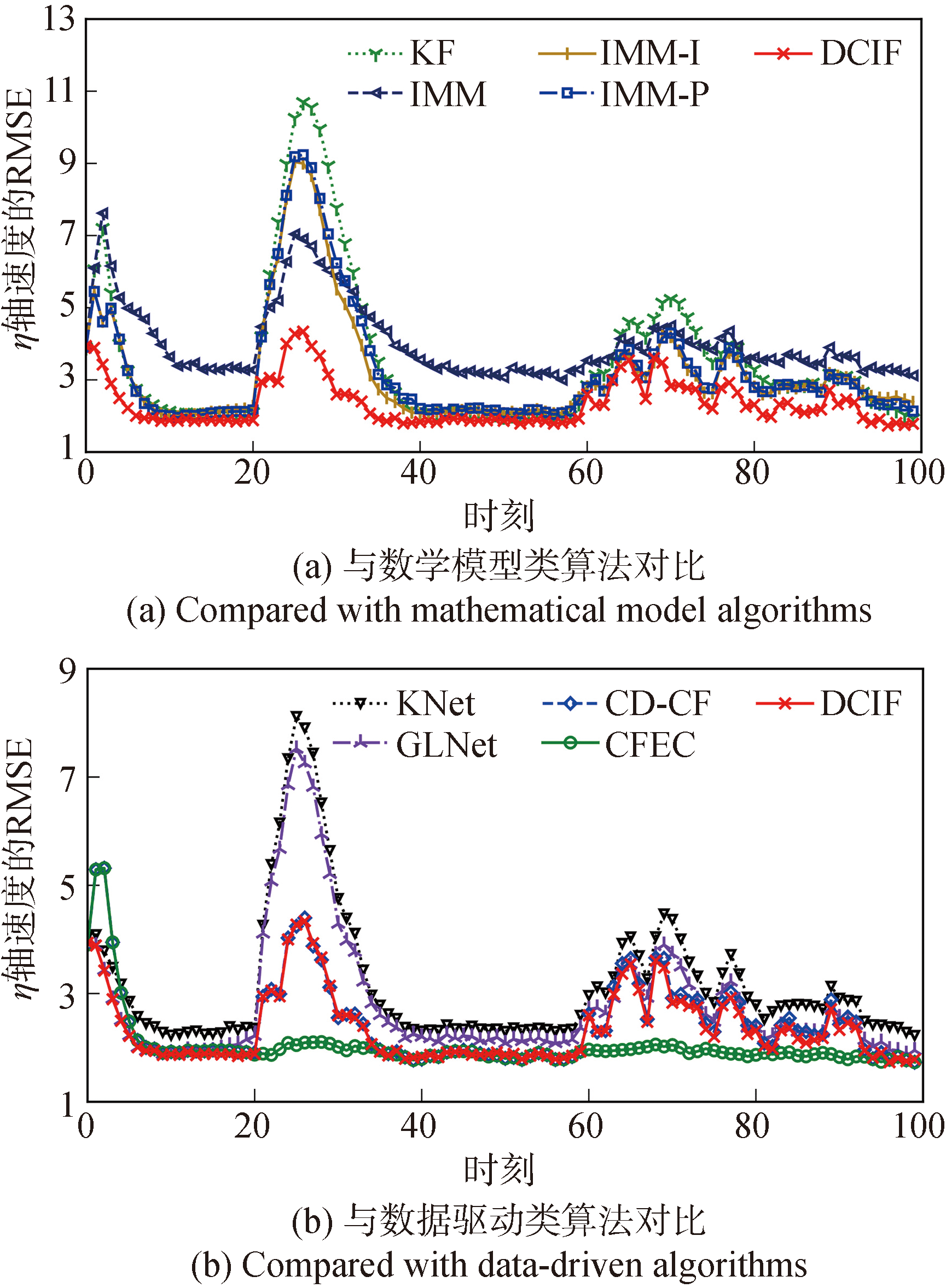
图11 η轴速度的1000次蒙特卡洛仿真
Fig.11 1000 Monte Carlo simulations of η axis velocity
| 对比算法 | ξ | η | ||
|---|---|---|---|---|
| KF | 8.45 | 9.24 | 3.08 | 3.61 |
| IMM | 8.48 | 8.47 | 3.79 | 4.04 |
| IMM-I | 12.17 | 12.19 | 3.04 | 3.22 |
| IMM-P | 11.94 | 12.21 | 3.09 | 3.29 |
| KNet | 7.73 | 7.91 | 2.84 | 3.18 |
| GLNet | 7.23 | 7.08 | 2.66 | 2.83 |
| CD-CF | 6.41 | 5.95 | 2.40 | 2.46 |
| CFEC | 6.20 | 5.70 | 2.21 | 2.04 |
| DCIF | 6.13 | 5.66 | 2.32 | 2.37 |
表3 对比算法的ARMSE
Table 3 ARMSEs of comparative algorithms
| 对比算法 | ξ | η | ||
|---|---|---|---|---|
| KF | 8.45 | 9.24 | 3.08 | 3.61 |
| IMM | 8.48 | 8.47 | 3.79 | 4.04 |
| IMM-I | 12.17 | 12.19 | 3.04 | 3.22 |
| IMM-P | 11.94 | 12.21 | 3.09 | 3.29 |
| KNet | 7.73 | 7.91 | 2.84 | 3.18 |
| GLNet | 7.23 | 7.08 | 2.66 | 2.83 |
| CD-CF | 6.41 | 5.95 | 2.40 | 2.46 |
| CFEC | 6.20 | 5.70 | 2.21 | 2.04 |
| DCIF | 6.13 | 5.66 | 2.32 | 2.37 |

图12 不同r在ξ轴位置的ARMSE
Fig.12 ARMSEs at different r positions along ξ axis

图13 不同r在η轴位置的ARMSE
Fig.13 ARMSEs at different r positions along η axis

图14 不同r在ξ轴速度的ARMSE
VFig.14 ARMSEs at different r velocities along ξ axis

图15 不同r在η轴速度的ARMSE
Fig.15 ARMSEs at different r velocities along η axis
| [1] |
韩静茹, 吴炎烜, 杨喆, 等. 针对机动目标的防空导弹引战配合建模与仿真[J]. 兵工学报, 2017, 38(增刊1):200-204.
|
|
|
|
| [2] |
闫文旭, 兰华, 王增福, 等. 基于变分贝叶斯的星载雷达非线性滤波[J]. 航空学报, 2020, 41(增刊2):724395.
|
|
doi: 10.7527/S1000-6893.2020.24395 |
|
| [3] |
|
| [4] |
|
| [5] |
张昀普, 单甘霖. 道路约束下多传感器协同地面目标跟踪的管理方法[J]. 兵工学报, 2022, 43(3):542-555.
doi: 10.12382/bgxb.2021.0122 |
|
doi: 10.12382/bgxb.2021.0122 |
|
| [6] |
熊光明, 罗震, 孙冬, 等. 基于红外相机和毫米波雷达融合的烟雾遮挡无人驾驶车辆目标检测与跟踪[J]. 兵工学报, 2024, 45(3):893-906.
doi: 10.12382/bgxb.2022.0602 |
|
doi: 10.12382/bgxb.2022.0602 |
|
| [7] |
何友, 修建娟, 刘瑜, 等. 雷达数据处理及应用[M]. 第4版. 北京: 电子工业出版社, 2022:402-404.
|
|
|
|
| [8] |
|
| [9] |
杨家铭, 潘悦, 王强, 等. 水下弱目标跟踪的深度学习方法研究[J]. 兵工学报, 2024, 45(2):385-394.
doi: 10.12382/bgxb.2022.0842 |
|
|
|
| [10] |
|
| [11] |
段艳杰, 吕宜生, 张杰, 等. 深度学习在控制领域的研究现状与展望[J]. 自动化学报, 2016, 42(5):643-654.
|
|
|
|
| [12] |
|
| [13] |
熊伟, 朱洪峰, 崔亚奇. 在线学习的循环自适应机动目标跟踪算法[J]. 航空学报, 2022, 43(5):444-456.
|
|
|
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [1] | 孙世岩, 李琳, 朱惠民, 石章松, 梁伟阁. 基于IFPRM-SBLFS深度学习的飞行模式智能识别方法[J]. 兵工学报, 2025, 46(5): 240893-. |
| [2] | 桂凡, 石章松, 孙世岩, 应文健, 胡卫强, 徐慧慧, 吴中红, 胡清平, 张俊. 基于动态特征的海上弹着点水柱检测跟踪算法[J]. 兵工学报, 2025, 46(5): 240918-. |
| [3] | 才华, 周鸿策, 付强, 赵义武. 基于多层特征嵌入的单目标跟踪算法[J]. 兵工学报, 2025, 46(3): 240062-. |
| [4] | 杨绪祺, 谭启凡, 苏航, 谭浩. 面向无人机视觉制导的自适应目标跟踪方法[J]. 兵工学报, 2025, 46(2): 240284-. |
| [5] | 孙溪晨, 李伟兵, 黄昌伟, 付佳维, 冯君. 基于自注意力机制增强的CNN-LSTM的榴弹轨迹多步超前预测[J]. 兵工学报, 2024, 45(S1): 51-59. |
| [6] | 乔新博, 赵永强, 张景程. 基于空间偏振混叠特性的红外偏振视频目标跟踪[J]. 兵工学报, 2024, 45(9): 3274-3287. |
| [7] | 赵志欣, 曹玉龙, 陈远帅, 周辉林, 王玉皞. 面向外辐射源雷达目标探测的非时变稀疏模型和深度展开网络实现方法[J]. 兵工学报, 2024, 45(8): 2806-2816. |
| [8] | 王泳安, 李东光, 吴浩, 刘洋. 一种自适应滤波与干扰观测器相结合的大型舰船状态估计算法[J]. 兵工学报, 2024, 45(7): 2318-2328. |
| [9] | 罗皓文, 何绍溟, 亢有为. 一种基于迁移学习的多任务制导算法[J]. 兵工学报, 2024, 45(6): 1787-1798. |
| [10] | 栗苹, 周宇, 曹荣刚, 李发栋, 曹宇曦, 李佳武, 张安琪. 基于深度学习和双域融合的红外成像制导系统复杂背景噪声去除方法[J]. 兵工学报, 2024, 45(6): 1747-1760. |
| [11] | 沈英, 刘贤财, 王舒, 黄峰. 基于偏振编码图像的低空伪装目标实时检测[J]. 兵工学报, 2024, 45(5): 1374-1383. |
| [12] | 阴国华, 齐咏生, 刘利强, 苏建强, 张丽杰. 基于Ghost-TiFPN的轻量化快速目标跟踪算法[J]. 兵工学报, 2024, 45(5): 1703-1716. |
| [13] | 梁苑, 戚国庆, 陈烨, 李银伢, 盛安冬. 不完全量测下事件触发水面扩展目标跟踪[J]. 兵工学报, 2024, 45(4): 1219-1228. |
| [14] | 熊光明, 罗震, 孙冬, 陶俊峰, 唐泽月, 吴超. 基于红外相机和毫米波雷达融合的烟雾遮挡无人驾驶车辆目标检测与跟踪[J]. 兵工学报, 2024, 45(3): 893-906. |
| [15] | 田大明, 苗圃. 融合模型求解与深度学习的可见光通信非线性均衡器[J]. 兵工学报, 2024, 45(2): 466-473. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4