
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (3): 240062-.doi: 10.12382/bgxb.2024.0062
才华1,*( ), 周鸿策1, 付强2, 赵义武2
), 周鸿策1, 付强2, 赵义武2
收稿日期:2024-01-18
上线日期:2025-03-26
通讯作者:
基金资助:
CAI Hua1,*(), ZHOU Hongce1, FU Qiang2, ZHAO Yiwu2
Received:2024-01-18
Online:2025-03-26
摘要:
针对现有视觉目标跟踪方法仅使用初始帧的目标单一外观特征,导致当背景复杂或外观发生剧烈变化时跟踪失效的问题,提出一种基于多层特征嵌入的单目标跟踪算法。增强目标的外观区分度,使用稀疏内嵌注意力机制编码器,嵌入具有高实例区分度的外观特征;采用类间特征聚合编码器嵌入目标的类别信息,在外观发生变化时保持类内的紧凑性;同时将预测的历史帧跟踪框坐标转化为目标运动轨迹特征嵌入,为算法提供高置信度的时间上下文特征。研究结果表明:所提算法在OTB100基准测试中成功率和准确率分别达到71.4%和92.6%,在GOT-10K、LaSOT、TrackingNet共3个大规模公开数据上取得了鲁棒的效果,成功率分别达到64.9%、72.0%和78.7%;基于多层特征嵌入的单目标跟踪算法有效地克服了现有算法的局限,具有较好的准确性和鲁棒性。
中图分类号:
才华, 周鸿策, 付强, 赵义武. 基于多层特征嵌入的单目标跟踪算法[J]. 兵工学报, 2025, 46(3): 240062-.
CAI Hua, ZHOU Hongce, FU Qiang, ZHAO Yiwu. Single Object Tracking Algorithm Based on Multilayer Feature Embedding[J]. Acta Armamentarii, 2025, 46(3): 240062-.
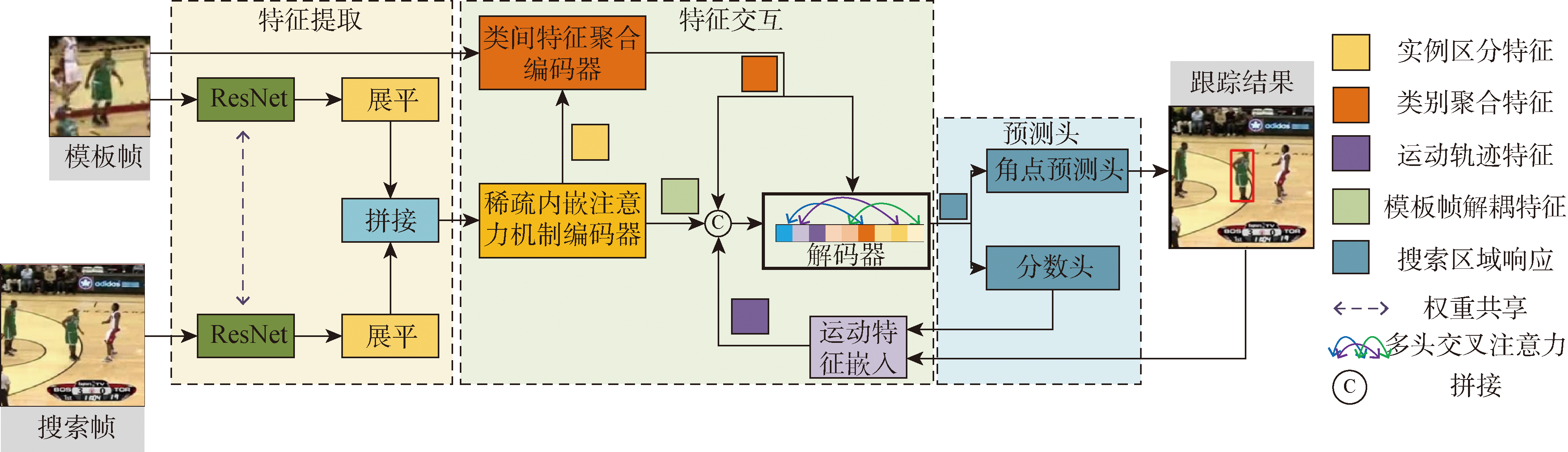
图1 目标跟踪算法的整体框架
Fig.1 The overall framework of the proposed tracking algorithm

图2 稀疏内嵌注意力机制
Fig.2 Sparse inner attention mechanism
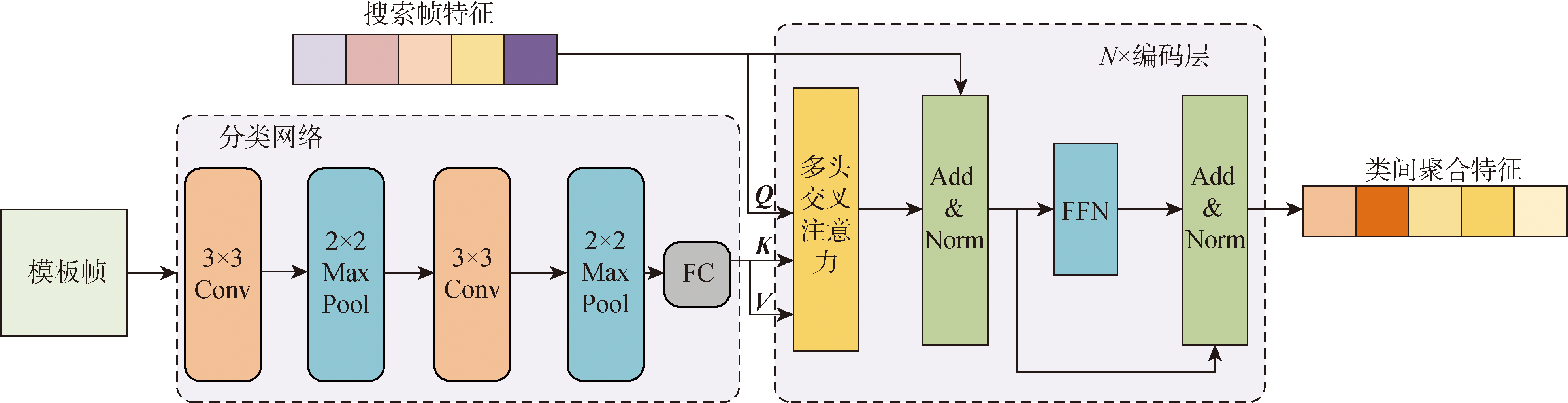
图3 类间特征聚合编码器
Fig.3 Category feature aggregation encoder
| 序号 | 搜索区域 | 原始特征 | 实例增强特征 | 类别聚合特征 |
|---|---|---|---|---|
| 1 | | | | |
| 2 | | | | |
| 3 | | | | |
| 4 | | | | |
表1 编码器输出特征可视化
Table 1 Encoder output feature visualization
| 序号 | 搜索区域 | 原始特征 | 实例增强特征 | 类别聚合特征 |
|---|---|---|---|---|
| 1 | | | | |
| 2 | | | | |
| 3 | | | | |
| 4 | | | | |

图4 解码器结构
Fig.4 Schematic diagram of decoder structure
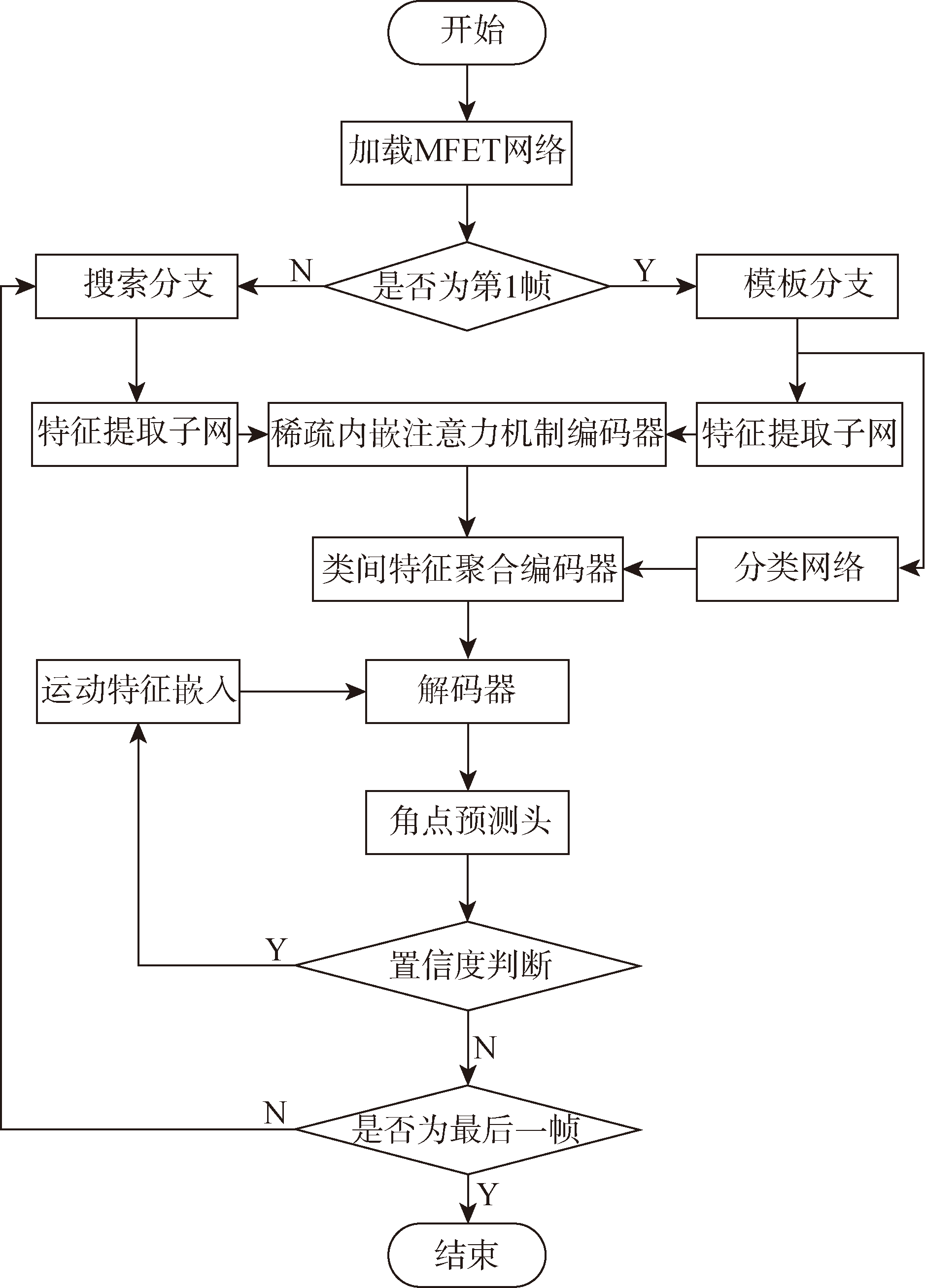
图5 MFET跟踪流程
Fig.5 MFET tracking process
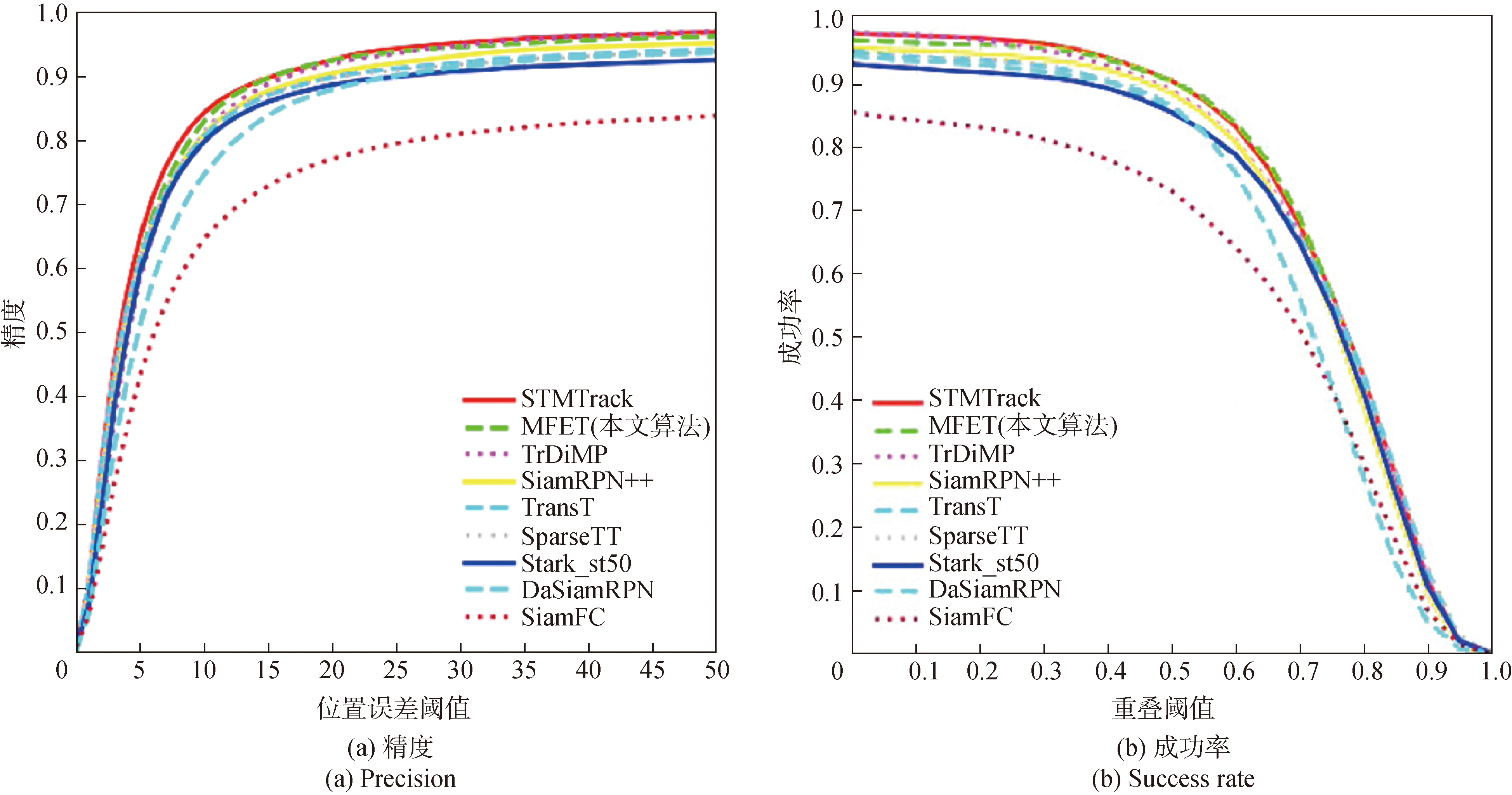
图6 OTB100数据集上定量实验结果
Fig.6 Quantitative experimental results on OTB100 dataset
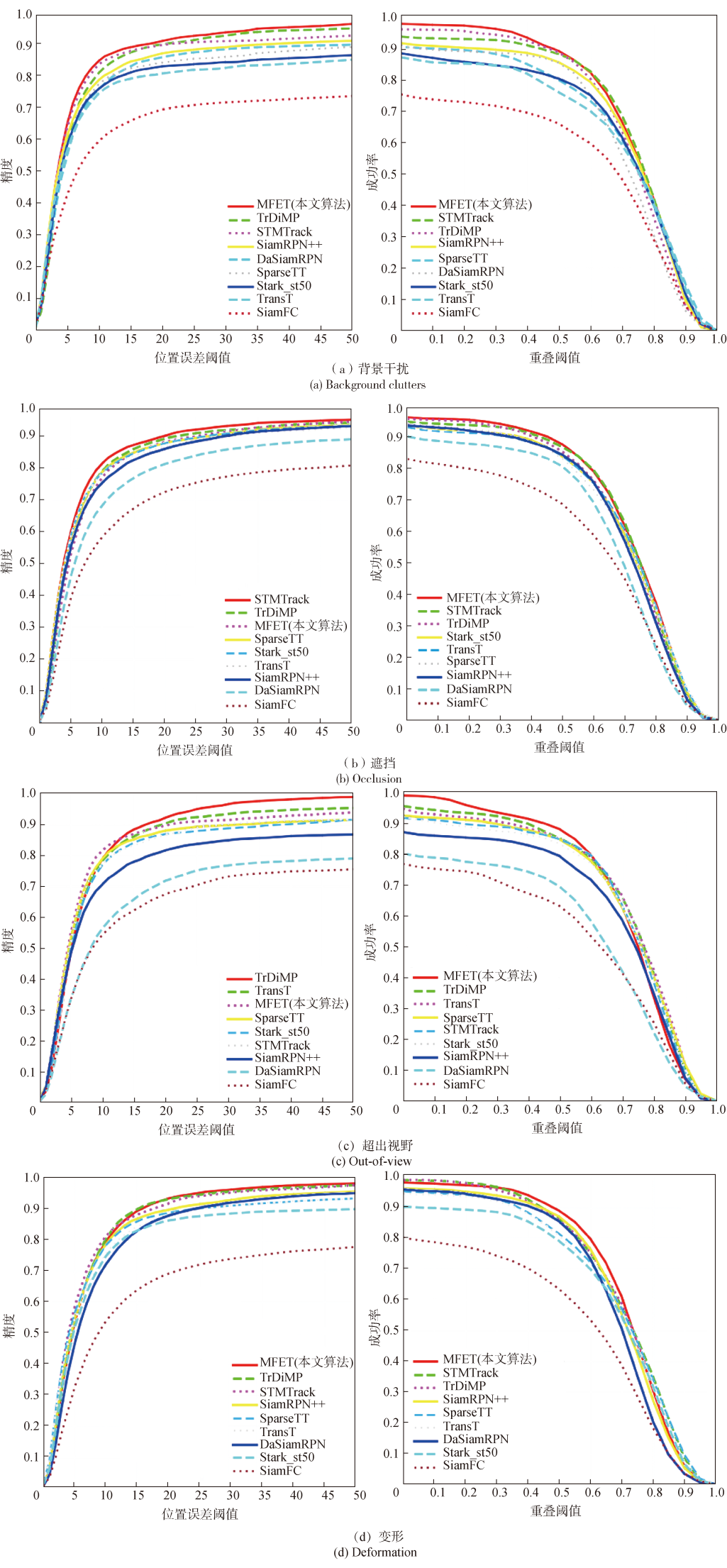
图7 OTB100数据集上4个属性的精度和成功率对比结果
Fig.7 Comparison of accuracies and success rates of 4 attributes on OTB100 dataset
| 视频序列 | 不同算法的跟踪结果 |
|---|---|
| 自行车 | |
| 鸟 | |
| 盒子 | |
| 女孩 | |
| 液体 | |
表2 OTB100数据集上选定视频序列的定性结果
Table 2 Qualitative results of selected video sequence on the OTB100 Dataset
| 视频序列 | 不同算法的跟踪结果 |
|---|---|
| 自行车 | |
| 鸟 | |
| 盒子 | |
| 女孩 | |
| 液体 | |
| 模型编号 | 稀疏内嵌 注意力 编码器 | 类间特征 聚合编 码器 | 运动特 征嵌入 | 成功率 | 精度 |
|---|---|---|---|---|---|
| MFET(0) | √ | 0.671 | 0.887 | ||
| MFET(1) | √ | √ | 0.694 | 0.900 | |
| MFET(2) | √ | √ | 0.692 | 0.897 | |
| MFET(3) | √ | √ | √ | 0.714 | 0.926 |
表3 本文算法各个组成模块的消融研究
Table 3 Ablation study of each module of the proposed algorithm
| 模型编号 | 稀疏内嵌 注意力 编码器 | 类间特征 聚合编 码器 | 运动特 征嵌入 | 成功率 | 精度 |
|---|---|---|---|---|---|
| MFET(0) | √ | 0.671 | 0.887 | ||
| MFET(1) | √ | √ | 0.694 | 0.900 | |
| MFET(2) | √ | √ | 0.692 | 0.897 | |
| MFET(3) | √ | √ | √ | 0.714 | 0.926 |
| 数据集 | 评价指标 | 算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| SiamFC | SiamRPN++ | TrDiMP | TransT | SparseTT | STARK-ST101 | MFET | ||
| LaSOT | 归一化精度 | 0.420 | 0.570 | 0.730 | 0.738 | 0.740 | 0.765 | 0.768 |
| 准确率 | 0.399 | 0.493 | 0.622 | 0.690 | 0.701 | 0.714 | 0.720 | |
| AUC | 0.336 | 0.495 | 0.639 | 0.649 | 0.660 | 0.668 | 0.670 | |
| GOT-10K | 平均重叠率 | 0.348 | 0.517 | 0.688 | 0.723 | 0.693 | 0.688 | 0.691 |
| SR0.5 | 0.353 | 0.616 | 0.805 | 0.824 | 0.791 | 0.781 | 0.788 | |
| SR0.75 | 0.098 | 0.325 | 0.597 | 0.682 | 0.638 | 0.641 | 0.649 | |
| TrackingNet | 归一化精度 | 0.663 | 0.800 | 0.833 | 0.867 | 0.866 | 0.869 | 0.867 |
| 准确率 | 0.533 | 0.694 | 0.731 | 0.803 | 0.795 | - | 0.787 | |
| AUC | 0.571 | 0.733 | 0.784 | 0.814 | 0.817 | 0.820 | 0.821 | |
表4 不同算法在3个跟踪基准的比较
Table 4 Comparison of three tracking benchmarks
| 数据集 | 评价指标 | 算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| SiamFC | SiamRPN++ | TrDiMP | TransT | SparseTT | STARK-ST101 | MFET | ||
| LaSOT | 归一化精度 | 0.420 | 0.570 | 0.730 | 0.738 | 0.740 | 0.765 | 0.768 |
| 准确率 | 0.399 | 0.493 | 0.622 | 0.690 | 0.701 | 0.714 | 0.720 | |
| AUC | 0.336 | 0.495 | 0.639 | 0.649 | 0.660 | 0.668 | 0.670 | |
| GOT-10K | 平均重叠率 | 0.348 | 0.517 | 0.688 | 0.723 | 0.693 | 0.688 | 0.691 |
| SR0.5 | 0.353 | 0.616 | 0.805 | 0.824 | 0.791 | 0.781 | 0.788 | |
| SR0.75 | 0.098 | 0.325 | 0.597 | 0.682 | 0.638 | 0.641 | 0.649 | |
| TrackingNet | 归一化精度 | 0.663 | 0.800 | 0.833 | 0.867 | 0.866 | 0.869 | 0.867 |
| 准确率 | 0.533 | 0.694 | 0.731 | 0.803 | 0.795 | - | 0.787 | |
| AUC | 0.571 | 0.733 | 0.784 | 0.814 | 0.817 | 0.820 | 0.821 | |
| 算法 | 搜索区域 尺寸 | 速度/ (帧·s-1) | 浮点数/G | 参数/M |
|---|---|---|---|---|
| SiamRPN++ | 255×255 | 5.17 | 48.92 | 53.95 |
| SiamBAN | 255×255 | 23.71 | 48.84 | 53.93 |
| SiamDW | 255×255 | 52.58 | 12.90 | 2.46 |
| AiATrack | 320×320 | 31 | 9.45 | 17.95 |
| STARK-ST101 | 320×320 | 17.9 | 18.48 | 47.17 |
| TransT | 256×256 | 21.15 | 16.71 | 23.02 |
| SparseTT | 289×289 | 30.50 | 9.21 | 46.33 |
| GRM | 256×256 | 36.02 | 30.90 | 99.83 |
| SwinTrack | 384×384 | 11.92 | 61.85 | 90.96 |
| MFET(本文算法) | 320×320 | 24.41 | 22.12 | 65.75 |
表5 速度、浮点数和参数的比较
Table 5 Comparison of the speeds,FLOPs and parameters
| 算法 | 搜索区域 尺寸 | 速度/ (帧·s-1) | 浮点数/G | 参数/M |
|---|---|---|---|---|
| SiamRPN++ | 255×255 | 5.17 | 48.92 | 53.95 |
| SiamBAN | 255×255 | 23.71 | 48.84 | 53.93 |
| SiamDW | 255×255 | 52.58 | 12.90 | 2.46 |
| AiATrack | 320×320 | 31 | 9.45 | 17.95 |
| STARK-ST101 | 320×320 | 17.9 | 18.48 | 47.17 |
| TransT | 256×256 | 21.15 | 16.71 | 23.02 |
| SparseTT | 289×289 | 30.50 | 9.21 | 46.33 |
| GRM | 256×256 | 36.02 | 30.90 | 99.83 |
| SwinTrack | 384×384 | 11.92 | 61.85 | 90.96 |
| MFET(本文算法) | 320×320 | 24.41 | 22.12 | 65.75 |
| 序列 | 跟踪结果 |
|---|---|
| 飞机-9 | |
| 飞机-13 | |
| 坦克-14 | |
| 坦克-16 | |
表6 LaSOT数据集仿真测试
Table 6 LaSOT dataset simulation test
| 序列 | 跟踪结果 |
|---|---|
| 飞机-9 | |
| 飞机-13 | |
| 坦克-14 | |
| 坦克-16 | |
| 序列 | 跟踪结果 |
|---|---|
| 1 | |
| 2 | |
| 3 | |
| 4 | |
表7 实际验证结果
Table 7 Real scene verification results
| 序列 | 跟踪结果 |
|---|---|
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| [1] |
陆康亮, 薛俊, 陶重犇. 融合空间掩膜预测与点云投影的多目标跟踪[J]. 光电工程, 2022, 49(9):49-63.
|
|
|
|
| [2] |
才华, 寇婷婷, 杨依宁, 等. 基于轨迹优化的三维车辆多目标跟踪[J/OL]. 吉林大学学报(工学版), 2023(2023-05-09)[2024-01-11].https://doi.org/10.13229/j.cnki.Jdxbgxb.20221373.
|
|
|
|
| [3] |
姜珊, 底晓强, 韩成. 融合时空特性的孪生网络视觉跟踪[J]. 兵工学报, 2021, 42(9):1940-1950.
doi: 10.3969/j.issn.1000-1093.2021.09.015 |
|
doi: 10.3969/j.issn.1000-1093.2021.09.015 |
|
| [4] |
梁杰, 李磊, 任君, 等. 基于深度学习的红外图像遮挡干扰检测方法[J]. 兵工学报, 2019, 40(7):1401-1410.
doi: 10.3969/j.issn.1000-1093.2019.07.009 |
|
doi: 10.3969/j.issn.1000-1093.2019.07.009 |
|
| [5] |
陈瑞东, 秦会斌. 多特征融合与Kalman滤波的CAMShift跟踪算法[J]. 计算机仿真, 2024, 41(3):200-205,236.
|
|
|
|
| [10] |
孙家伟. 基于域不变投影的全天候目标跟踪方法研究[D]. 南京: 南京邮电大学, 2023.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
才华, 王学伟, 付强, 等. 基于动态模板更新的孪生网络目标跟踪算法[J]. 吉林大学学报(工学版), 2022, 52(5):1106-1116.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
刘广文, 谢欣月, 付强, 等. 基于时空模板焦点注意的Transformer目标跟踪算法[J/OL]. 吉林大学学报(工学版), 2024(2023-10-18)[2024-01-11].https://doi.org/10.13229/j.cnki.Jdxbgxb.20230544.
|
|
|
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
doi: 10.1109/TPAMI.2014.2388226 pmid: 26353130 |
| [30] |
|
| [6] |
阴国华, 齐咏生, 刘利强, 等. 基于Ghost-TiFPN的轻量化快速目标跟踪算法[J]. 兵工学报, 45(5):1703-1716.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
|
| [1] | 杨绪祺, 谭启凡, 苏航, 谭浩. 面向无人机视觉制导的自适应目标跟踪方法[J]. 兵工学报, 2025, 46(2): 240284-. |
| [2] | 乔新博, 赵永强, 张景程. 基于空间偏振混叠特性的红外偏振视频目标跟踪[J]. 兵工学报, 2024, 45(9): 3274-3287. |
| [3] | 阴国华, 齐咏生, 刘利强, 苏建强, 张丽杰. 基于Ghost-TiFPN的轻量化快速目标跟踪算法[J]. 兵工学报, 2024, 45(5): 1703-1716. |
| [4] | 梁苑, 戚国庆, 陈烨, 李银伢, 盛安冬. 不完全量测下事件触发水面扩展目标跟踪[J]. 兵工学报, 2024, 45(4): 1219-1228. |
| [5] | 熊光明, 罗震, 孙冬, 陶俊峰, 唐泽月, 吴超. 基于红外相机和毫米波雷达融合的烟雾遮挡无人驾驶车辆目标检测与跟踪[J]. 兵工学报, 2024, 45(3): 893-906. |
| [6] | 杨家铭, 潘悦, 王强, 曹怀刚, 高荪培. 水下弱目标跟踪的深度学习方法研究[J]. 兵工学报, 2024, 45(2): 385-394. |
| [7] | 马潇, 李新祺, 刘镇源, 邸超. 基于背景感知相关滤波跟踪器的目标快速跟踪方法[J]. 兵工学报, 2024, 45(2): 497-503. |
| [8] | 刘增力, 张文, 曹奇宏, 赵宣植, 刘康, 曾赛. 面向三维目标跟踪的状态转换卡尔曼滤波方法[J]. 兵工学报, 2024, 45(11): 3998-4010. |
| [9] | 赵军民, 何浩哲, 王少奇, 聂聪, 焦迎杰. 复杂环境下多无人机目标跟踪与避障联合航迹规划[J]. 兵工学报, 2023, 44(9): 2685-2696. |
| [10] | 郑磊, 陈志敏, 贾宇轩. 基于广域部署智能反射面的无人机集群跟踪方法[J]. 兵工学报, 2023, 44(6): 1837-1845. |
| [11] | 刘灿, 王辉, 林德福, 崔晓曦, 徐晗晖. 存在非高斯重尾分布噪声的纯方位目标跟踪算法[J]. 兵工学报, 2023, 44(5): 1469-1481. |
| [12] | 张昀普, 单甘霖. 道路约束下多传感器协同地面目标跟踪的管理方法[J]. 兵工学报, 2022, 43(3): 542-555. |
| [13] | 王奎武, 张秦, 虎小龙. 基于多目标不确定性改进的GM-PHD滤波器[J]. 兵工学报, 2022, 43(12): 3113-3121. |
| [14] | 龚诗雄, 王旭, 孔国杰, 龚建伟. 多车协同目标跟踪方法[J]. 兵工学报, 2022, 43(10): 2429-2442. |
| [15] | 李纪三, 侯娇, 刘溶, 任渊. 基于贝叶斯滤波算法的警戒相控阵雷达目标跟踪时间资源优化分配算法[J]. 兵工学报, 2021, 42(9): 1902-1910. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4