
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (11): 3841-3855.doi: 10.12382/bgxb.2023.1085
王伟1,2, 杨婧1,2, 南宇翔3, 李俊辉1,2, 王雨辰1,2,*( )
)
收稿日期:2023-11-03
上线日期:2024-01-17
通讯作者:
基金资助:
WANG Wei1,2, YANG Jing1,2, NAN Yuxiang3, LI Junhui1,2, WANG Yuchen1,2,*()
Received:2023-11-03
Online:2024-01-17
摘要:
旋转弹在飞行过程中受多种干扰的影响,包括跨域飞行气动参数剧烈变化引起的模型不确定性以及飞行过程中受到的外部扰动。为了解决高动态飞行环境中双通道旋转弹的鲁棒控制问题,基于轨迹线性化控制方法,设计伪逆反馈控制器。采用径向基函数神经网络,设计自适应前馈补偿控制器,有效实现对模型不确定性的精确逼近。将神经网络逼近误差和外部扰动处理为总扰动,并基于固定时间稳定理论设计一种自适应扰动观测器,实现对总扰动的精确估计及补偿。通过Lyapunov理论,严格证明了闭环系统的最终一致有界性。通过数值仿真验证了所设计方法的有效性。
中图分类号:
王伟, 杨婧, 南宇翔, 李俊辉, 王雨辰. 基于自适应扰动观测器的旋转弹神经网络过载驾驶仪设计[J]. 兵工学报, 2024, 45(11): 3841-3855.
WANG Wei, YANG Jing, NAN Yuxiang, LI Junhui, WANG Yuchen. Design of a Neural Network Acceleration Autopilot for Spinning Projectile Based on Adaptive Disturbance Observer[J]. Acta Armamentarii, 2024, 45(11): 3841-3855.

图1 RBFNN示意图
Fig.1 Schematic diagram of RBFNN

图2 旋转弹示意图
Fig.2 Schematic diagram of spinning projectile

图3 过载驾驶仪结构
Fig.3 Frame work of acceleration autopilot
| 观测器类别 | 观测器形式 | 参数取值 |
|---|---|---|
| FTDO | =v0-f1-b1u,v0=-λ2L1/3|z0-x|2/3sgn(z0-x)+z1 =v1,v1=-λ1L1/2|z1-v0|1/2sgn(z1-v0)+z2 =-λ0Lsgn(z2-v1) | zi(0),i=1,2 λ0=1.1,λ1=1.5,λ2=2 L=50 |
| FxTESO | =f1+b1u+α1si (x1-z1)+β1si (x1-z1) =α2si (x1-z1)+β2si (x1-z1)+γsign(x1-z1) | zi(0)=0,i=1,2,α1=3,β1=15 α2=1.5,β2=7.5,o1=0.9,θ1=1.01 o2=2o1-1,θ2=2θ1-1,γ=50 |
| AFxTSMDO | =z-x, =-f1-b1u-κ(sigp( )+sigq( ))+vd σ= +κ(sigp( )+sigq( )) =-κ(sigp(σ)+sigq(σ))-K(t)sgn(σ) (t)= | z(0)=0,vd(0)=0,κ=2,p=0.5 q=1.5,K(t)=0, =10,ε=0.1 |
表1 观测器参数
Table 1 Parameters of observer
| 观测器类别 | 观测器形式 | 参数取值 |
|---|---|---|
| FTDO | =v0-f1-b1u,v0=-λ2L1/3|z0-x|2/3sgn(z0-x)+z1 =v1,v1=-λ1L1/2|z1-v0|1/2sgn(z1-v0)+z2 =-λ0Lsgn(z2-v1) | zi(0),i=1,2 λ0=1.1,λ1=1.5,λ2=2 L=50 |
| FxTESO | =f1+b1u+α1si (x1-z1)+β1si (x1-z1) =α2si (x1-z1)+β2si (x1-z1)+γsign(x1-z1) | zi(0)=0,i=1,2,α1=3,β1=15 α2=1.5,β2=7.5,o1=0.9,θ1=1.01 o2=2o1-1,θ2=2θ1-1,γ=50 |
| AFxTSMDO | =z-x, =-f1-b1u-κ(sigp( )+sigq( ))+vd σ= +κ(sigp( )+sigq( )) =-κ(sigp(σ)+sigq(σ))-K(t)sgn(σ) (t)= | z(0)=0,vd(0)=0,κ=2,p=0.5 q=1.5,K(t)=0, =10,ε=0.1 |

图4 算例1状态估计及误差边界
Fig.4 State estimationand tracking error bound for Case 1

图5 算例1扰动估计及误差边界
Fig.5 Disturbance estimation and tracking error bound for Case 1

图6 算例1自适应增益
Fig.6 Adaptive gain for Case 1
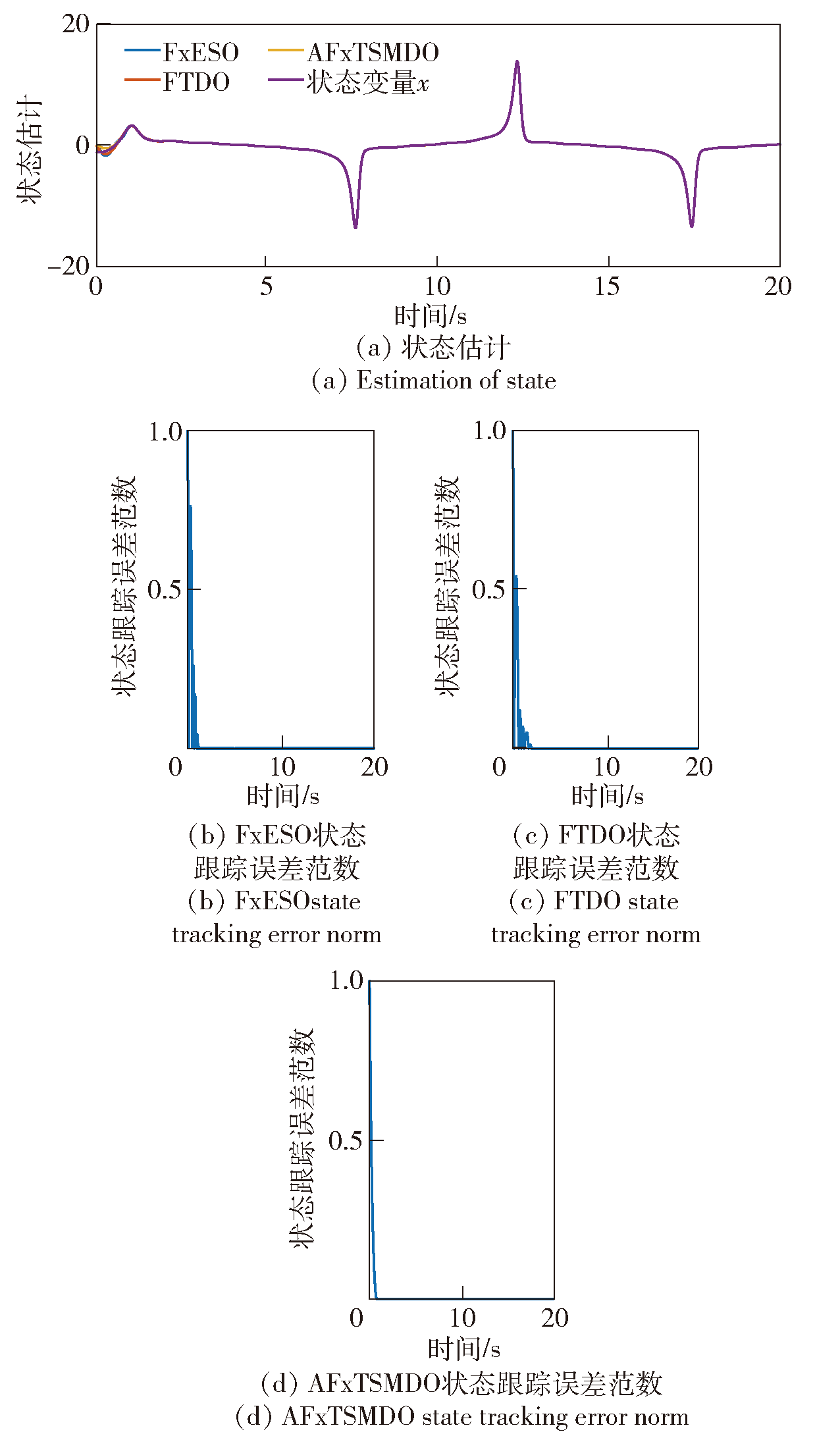
图7 算例2状态估计及误差边界
Fig.7 State estimationand tracking error bound for Case 2

图8 算例2扰动估计及误差边界
Fig.8 Disturbance estimation and tracking error bound for Case 2

图9 算例2自适应增益K(t)
Fig.9 Adaptive gain K(t) for Case 2
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| bL | 1.1240 | aG | 0.0791 |
| bM | 7.667×10-4 | v/(m·s-1) | 1200 |
| aL | 140.6137 | ks | 10 |
| aM | -7.1831 | μs | 0.5 |
| aω | 2.4018 | Ts/s | 0.016 |
| aδ | -11.6520 | τ/s | 0.015 |
表2 气动参数
Table 2 Aerodynamic parameters of spinning projectile
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| bL | 1.1240 | aG | 0.0791 |
| bM | 7.667×10-4 | v/(m·s-1) | 1200 |
| aL | 140.6137 | ks | 10 |
| aM | -7.1831 | μs | 0.5 |
| aω | 2.4018 | Ts/s | 0.016 |
| aδ | -11.6520 | τ/s | 0.015 |
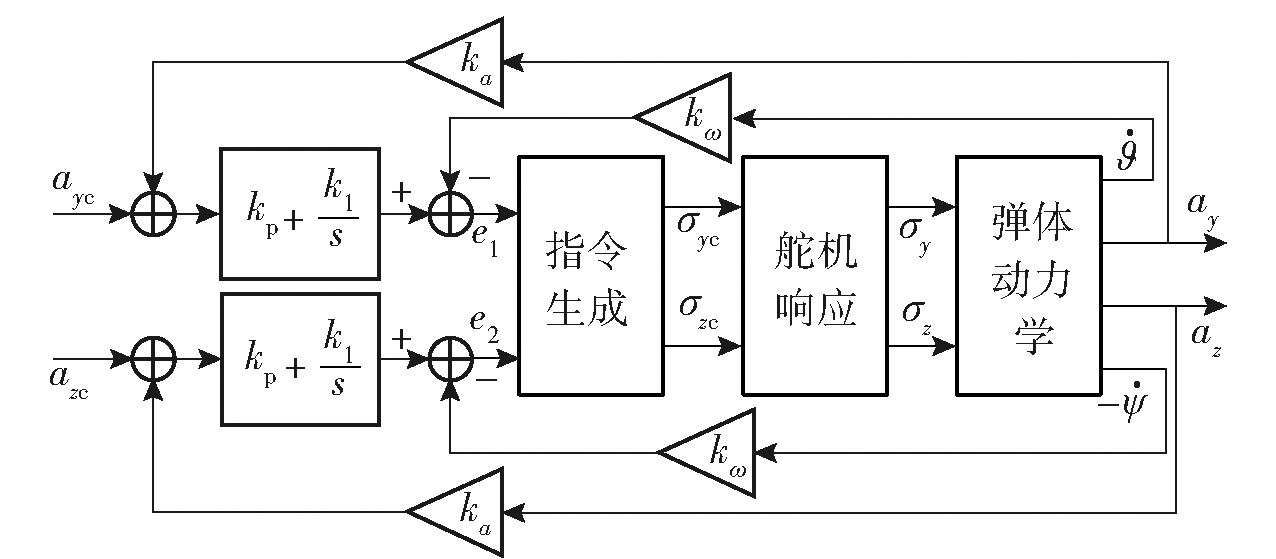
图10 双通道控制PI校正过载驾驶仪
Fig.10 Scheme of dual-channel controlled PI acceleration autopilot

图11 过载跟踪效果
Fig.11 Tracking result of acceleration

图12 过载跟踪误差
Fig.12 Accelerations tracking error

图13 姿态角速度跟踪效果
Fig.13 Tracking result of accelerations

图14 舵偏指令
Fig.14 Actuator deflection commands

图15 过载回路扰动估计
Fig.15 Disturbance estimation of acceleration loop

图16 姿态回路扰动估计
Fig.16 Disturbance estimation of attitude loop

图17 过载回路网络权重
Fig.17 Weights updating of the NN of acceleration loop

图18 姿态回路网络权重
Fig.18 Weights updating of the NN of attitude loop
| [1] |
杨树兴. 陆军多管火箭武器的发展与思考[J]. 兵工学报, 2016, 37(7): 1299-1305.
doi: 10.3969/j.issn.1000-1093.2016.07.019 |
|
|
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
石忠佼, 朱化杰, 赵良玉, 等. 考虑舵机动力学的旋转弹自适应解耦控制[J]. 航空学报, 2022, 43(3): 325068-1-325068-11.
|
|
|
|
| [14] |
|
| [15] |
|
| [16] |
王雨辰, 林德福, 王伟, 等. 大跨域条件下的自适应滚转稳定容错控制方法[J]. 航空学报, 2021, 42(3): 324368-1-324368-10.
|
|
|
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
胡伟, 万文章, 陈谋. 基于神经网络和干扰观测器的UAV自动着舰控制[J]. 航空学报, 2022, 43(增刊1): 726963-1-726963-10.
|
|
|
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [1] | 庞辉, 王明祥, 王磊, 郑理哲. 基于事件触发的汽车主动悬架振动控制器设计[J]. 兵工学报, 2024, 45(8): 2698-2711. |
| [2] | 季稳, 李春娜, 贾续毅, 王刚, 龚春林. 结合系统辨识和迁移学习的高速旋转弹气动力建模方法[J]. 兵工学报, 2024, 45(7): 2197-2208. |
| [3] | 严松, 姜毅, 邓月光, 文享华. 泡沫铝填充薄壁金属圆管吸能特性的预测及优化方法[J]. 兵工学报, 2024, 45(6): 1954-1964. |
| [4] | 苏迪, 王少博, 张成, 陈志升, 刘超越. 基于生成对抗网络的弹载图像盲去模糊算法[J]. 兵工学报, 2024, 45(3): 855-863. |
| [5] | 王雨辰, 王伟, 林时尧, 杨婧, 王少龙, 尹瞾. 考虑攻击时间及空间角度约束的三维自适应滑模协同制导律设计[J]. 兵工学报, 2023, 44(9): 2778-2790. |
| [6] | 宋金超, 赵良玉. 采用弹体追踪导引律的旋转弹锥形运动稳定性[J]. 兵工学报, 2023, 44(6): 1795-1808. |
| [7] | 张鑫, 林凡, 沈鑫杰. 基于改进SOGI-FLL的旋转弹舵机滞后测试方法[J]. 兵工学报, 2023, 44(2): 428-436. |
| [8] | 王少博, 张成, 苏迪, 冀瑞静. 基于改进YOLOv3和核相关滤波算法的旋转弹目标探测算法[J]. 兵工学报, 2022, 43(5): 1032-1045. |
| [9] | 陈成, 赵良玉, 谢浩怡, 郝晓兵. 单通道控制旋转弹角运动的复分析方法[J]. 兵工学报, 2021, 42(2): 308-319. |
| [10] | 丁天宝, 何朝, 王良明, 林智伟. 高速旋转炮弹宽海拔弹道解算方法[J]. 兵工学报, 2021, 42(1): 209-213. |
| [11] | 彭嘉诚, 蒋建伟, 廖伟. 高速旋转弹丸炸药装药在膛内运动中底层温度的数值模拟[J]. 兵工学报, 2020, 41(9): 1783-1791. |
| [12] | 钟阳, 王良明, 吴映锋. 基于计算流体力学与刚体动力学耦合的高速旋转弹丸弹道计算方法[J]. 兵工学报, 2020, 41(6): 1085-1095. |
| [13] | 李彬, 庞永杰, 朱枭猛, 程妍雪. 水下航行器环肋复合材料耐压壳6σ优化设计[J]. 兵工学报, 2018, 39(6): 1171-1177. |
| [14] | 鞠潭, 于纪言, 王晓鸣, 顾晓辉. 基于地磁辅助的弹载两轴陀螺传感器校正方法研究[J]. 兵工学报, 2018, 39(10): 1919-1926. |
| [15] | 孟鹏, 陈红彬, 钱林方, 李仁凤, 乐贵高. 弹带对高速旋转弹丸气动特性影响的数值模拟[J]. 兵工学报, 2017, 38(12): 2363-2372. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4