
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (5): 240743-.doi: 10.12382/bgxb.2024.0743
• • 上一篇
王义涛1, 王俊森1,2, 石章松2,*( ), 徐慧慧2, 朱伟明2
), 徐慧慧2, 朱伟明2
收稿日期:2024-08-29
上线日期:2025-05-07
通讯作者:
基金资助:
WANG Yitao1, WANG Junsen1,2, SHI Zhangsong2,*(), XU Huihui2, ZHU Weiming2
Received:2024-08-29
Online:2025-05-07
摘要:
针对多智能体任务目标分配中航迹代价估算不准确的问题,提出一种基于改进快速搜索树算法的航迹代价计算方法,在合理地规划智能体运动轨迹的同时提高智能体航迹代价估算的准确性;针对改进合同网算法投标过程中优势智能体过早签约的问题,提出一种智能体投标状态转化机制,使得优势智能体可以多次参与任务竞标,实现智能体系统任务负载的均衡。仿真结果表明,新提出的航迹代价计算方法能够较好地计算智能体与目标、目标与目标之间的航迹;智能体投标转化机制解决了优势智能体过早签约导致的资源浪费,智能体系统完成任务的执行时间较之前降低6.54%,但处理优势智能体问题时新的机制会增加整个任务分配的投标轮次。
中图分类号:
王义涛, 王俊森, 石章松, 徐慧慧, 朱伟明. 基于改进快速搜索树和合同网的多智能体目标分配算法[J]. 兵工学报, 2025, 46(5): 240743-.
WANG Yitao, WANG Junsen, SHI Zhangsong, XU Huihui, ZHU Weiming. Task Allocation for Multi-agent System Based on Extended Rapidly-exploring Random Tree and Contract Net[J]. Acta Armamentarii, 2025, 46(5): 240743-.

图1 RRT算法(上)与ERRT算法(下)对比
Fig.1 Comparison of RRT algorithm(upper) and ERRT algorithm(below)
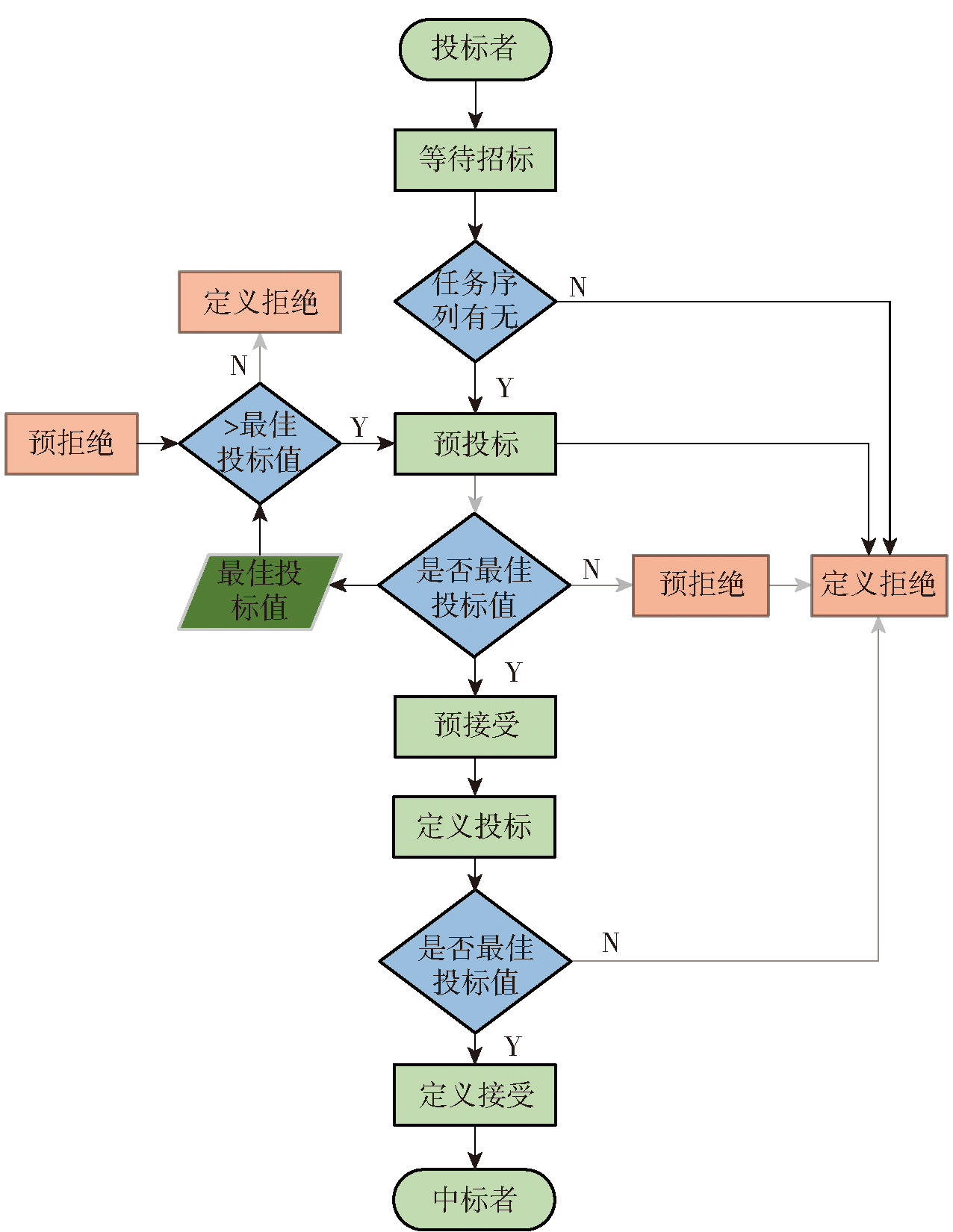
图2 智能体投标状态转换示意图
Fig.2 Agent bidding transformation
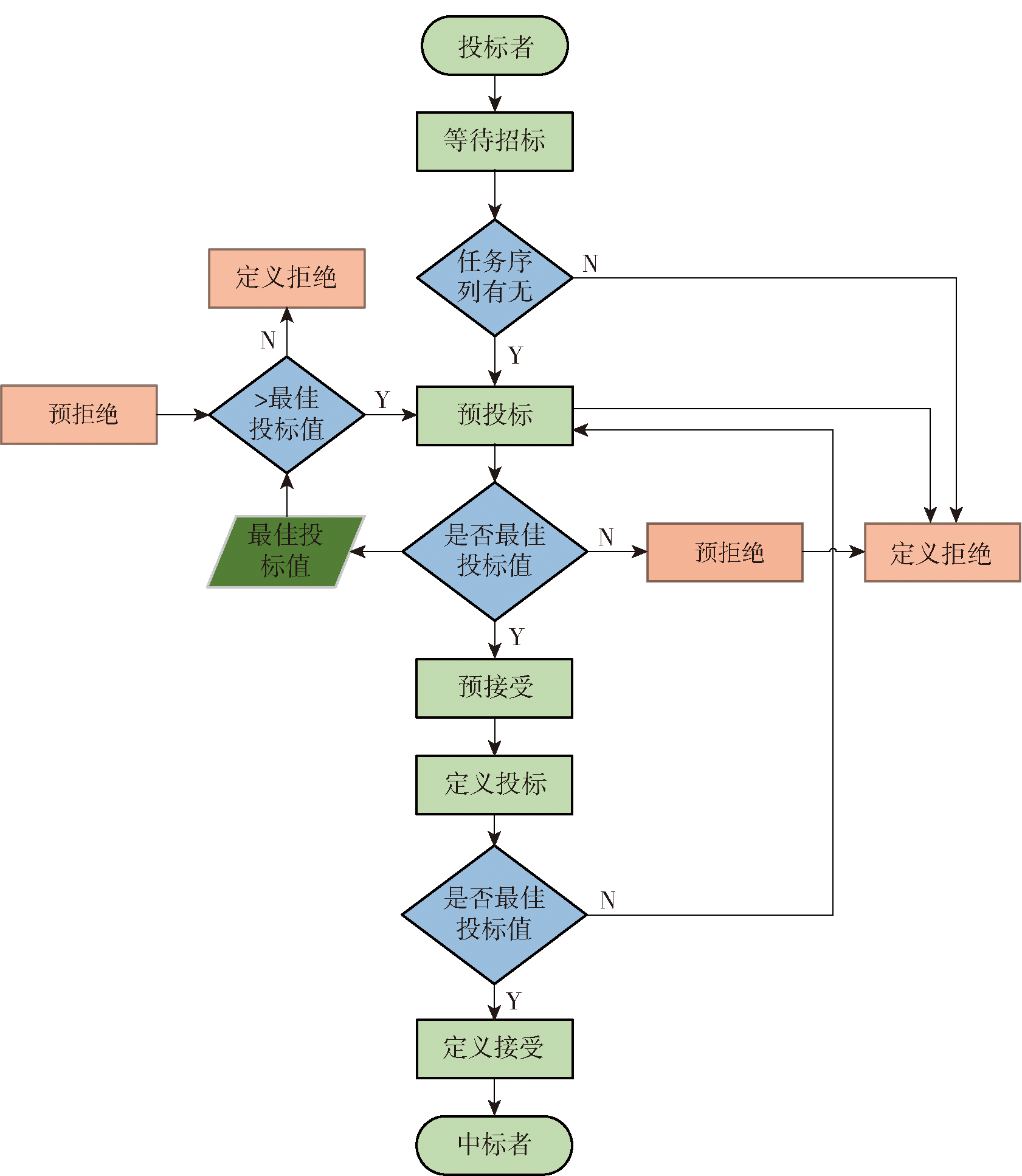
图3 改进智能体投标状态转换示意图
Fig.3 Improved agent bidding transformation
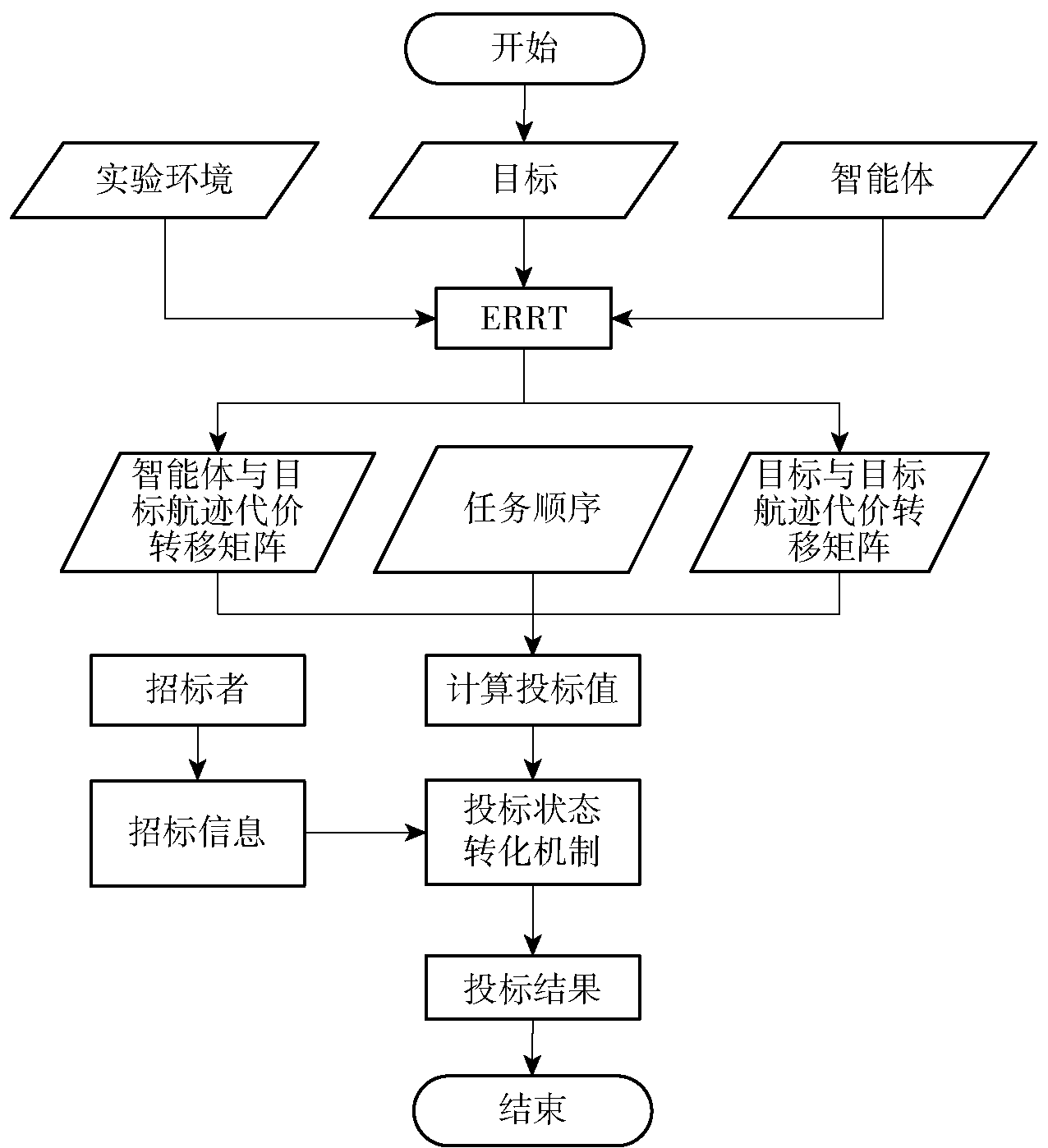
图4 本文算法流程图
Fig.4 Flow chart of the proposed algorithm

图5 场景DEM数据
Fig.5 DEM of test scene

图6 三维场景设置
Fig.6 3-D test scene
| 智能体 | 位置/ km | 速度/ (m·s-1) | 任务序列 |
|---|---|---|---|
| A1 | (1,1,1.68) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A2 | (1,10.0,1.49) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A3 | (1,20.0,2.95) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A4 | (1,30.0,2.5) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A5 | (1,40.0,1.26) | 150 | [6,3,7,8,5,1,2,4,9,10] |
表1 智能体信息
Table 1 Information of agents
| 智能体 | 位置/ km | 速度/ (m·s-1) | 任务序列 |
|---|---|---|---|
| A1 | (1,1,1.68) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A2 | (1,10.0,1.49) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A3 | (1,20.0,2.95) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A4 | (1,30.0,2.5) | 150 | [6,3,7,8,5,1,2,4,9,10] |
| A5 | (1,40.0,1.26) | 150 | [6,3,7,8,5,1,2,4,9,10] |
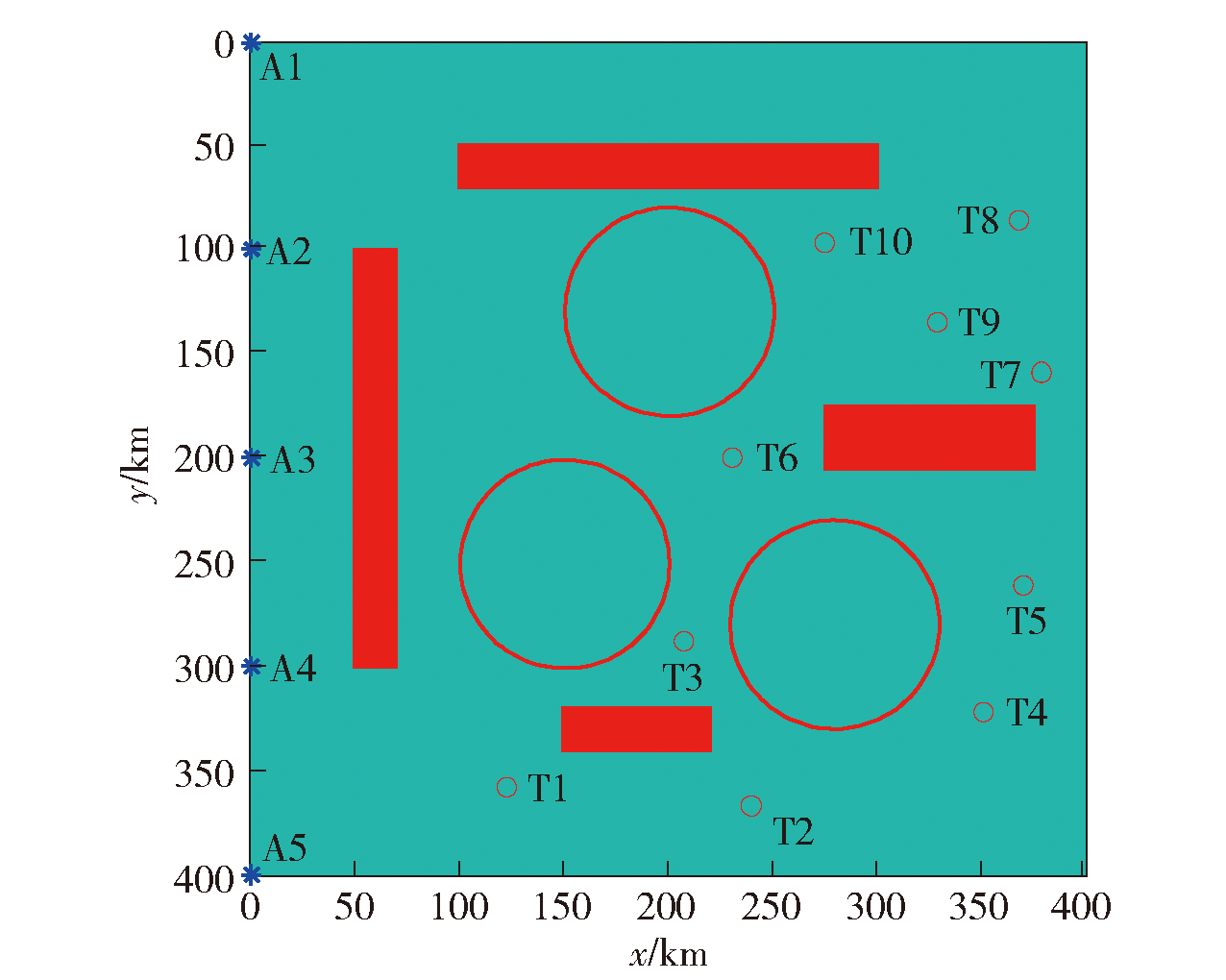
图7 智能体与目标位置示意图
Fig.7 Positions of agents and targets
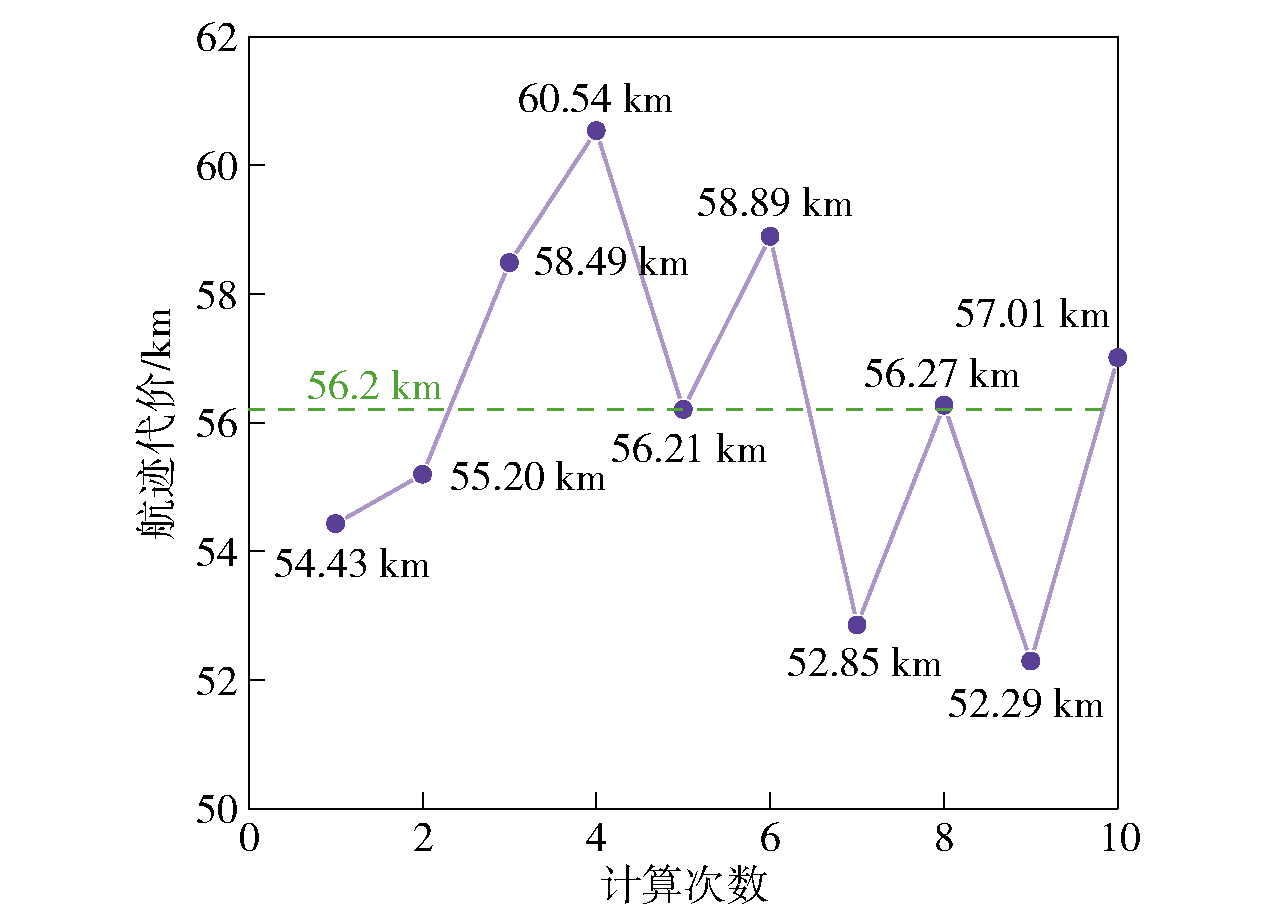
图8 航迹代价与均值示意图
Fig.8 Track costs and average

图9 ERRT算法计算智能体与目标点的航迹代价
Fig.9 Track costs of agents and targets calculated by ERRT algorithm

图10 ERRT算法计算智能体在目标点转移的航迹代价
Fig.10 Track costs of targets calculated by ERRT algorithm
| 任务编号 | 位置/km | 任务编号 | 位置/km |
|---|---|---|---|
| T1 | (12.3,35.8,1.65) | T6 | (23.1,20.0,4.86) |
| T2 | (24.0,36.7,2.31) | T7 | (37.9,15.9,2.73) |
| T3 | (20.8,28.8,2.22) | T8 | (36.8,8.6,3.80) |
| T4 | (35.1,32.2,2.62) | T9 | (32.9,13.5,4.94) |
| T5 | (37.0,26.1,2.21) | T10 | (27.5,9.7,2.83) |
表2 目标任务信息
Table 2 Information of tasks
| 任务编号 | 位置/km | 任务编号 | 位置/km |
|---|---|---|---|
| T1 | (12.3,35.8,1.65) | T6 | (23.1,20.0,4.86) |
| T2 | (24.0,36.7,2.31) | T7 | (37.9,15.9,2.73) |
| T3 | (20.8,28.8,2.22) | T8 | (36.8,8.6,3.80) |
| T4 | (35.1,32.2,2.62) | T9 | (32.9,13.5,4.94) |
| T5 | (37.0,26.1,2.21) | T10 | (27.5,9.7,2.83) |

图11 智能体与目标点欧氏距离
Fig.11 Euclidean distances among agents and targets

图12 目标点之间的欧氏距离
Fig.12 Euclidean distances between targets
| T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | T9 | T10 |
|---|---|---|---|---|---|---|---|---|---|
| 0.847 | 0.717 | 0.867 | 0.887 | 0.820 | 0.368 | 0.608 | 0.779 | 0.894 | 0.905 |
表3 目标打击代价
Table 3 Target strike cost
| T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | T9 | T10 |
|---|---|---|---|---|---|---|---|---|---|
| 0.847 | 0.717 | 0.867 | 0.887 | 0.820 | 0.368 | 0.608 | 0.779 | 0.894 | 0.905 |
| 任务 | 方案1 | 方案2 | 任务 | 方案1 | 方案2 | |
|---|---|---|---|---|---|---|
| T1 | A5 | A4 | T6 | A3 | A2 | |
| T2 | A5 | A4 | T7 | A2 | A1 | |
| T3 | A4 | A4 | T8 | A1 | A3 | |
| T4 | A5 | A5 | T9 | A1 | A1 | |
| T5 | A4 | A5 | T10 | A1 | A1 |
表4 任务分配对比
Table 4 Comparision of task allocations
| 任务 | 方案1 | 方案2 | 任务 | 方案1 | 方案2 | |
|---|---|---|---|---|---|---|
| T1 | A5 | A4 | T6 | A3 | A2 | |
| T2 | A5 | A4 | T7 | A2 | A1 | |
| T3 | A4 | A4 | T8 | A1 | A3 | |
| T4 | A5 | A5 | T9 | A1 | A1 | |
| T5 | A4 | A5 | T10 | A1 | A1 |
| 任务 | 签约 智能体 | 签约时 投标轮次 | 任务 | 签约 智能体 | 签约时 投标轮次 |
|---|---|---|---|---|---|
| T1 | A4 | 3 | T6 | A2 | 2 |
| T2 | A4 | 3 | T7 | A1 | 4 |
| T3 | A4 | 3 | T8 | A3 | 5 |
| T4 | A5 | 4 | T9 | A1 | 5 |
| T5 | A5 | 4 | T10 | A1 | 5 |
表5 智能体投标结果
Table 5 Bidding results of agents
| 任务 | 签约 智能体 | 签约时 投标轮次 | 任务 | 签约 智能体 | 签约时 投标轮次 |
|---|---|---|---|---|---|
| T1 | A4 | 3 | T6 | A2 | 2 |
| T2 | A4 | 3 | T7 | A1 | 4 |
| T3 | A4 | 3 | T8 | A3 | 5 |
| T4 | A5 | 4 | T9 | A1 | 5 |
| T5 | A5 | 4 | T10 | A1 | 5 |
| 智能体 | 执行任务的 总航迹代价/km | 智能体 | 执行任务的 总航迹代价/km |
|---|---|---|---|
| A1 | 70.4 | A4 | 65.16 |
| A2 | 34.74 | A5 | 63.8 |
| A3 | 59.04 |
表6 智能体任务负载
Table 6 Task loads of agents
| 智能体 | 执行任务的 总航迹代价/km | 智能体 | 执行任务的 总航迹代价/km |
|---|---|---|---|
| A1 | 70.4 | A4 | 65.16 |
| A2 | 34.74 | A5 | 63.8 |
| A3 | 59.04 |
| 智能体 | T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | T9 | T10 |
|---|---|---|---|---|---|---|---|---|---|---|
| A1 | 188 | 203 | 54 | 219 | 143 | 41 | 91 | 101 | 256 | 265 |
| A2 | 183 | 197 | 49 | 213 | 138 | 35 | 86 | 95 | 251 | 260 |
| A3 | 195 | 210 | 61 | 226 | 150 | 48 | 98 | 108 | 263 | 272 |
| A4 | 184 | 198 | 50 | 214 | 139 | 36 | 87 | 96 | 252 | 261 |
| A5 | 190 | 204 | 56 | 220 | 145 | 42 | 93 | 102 | 258 | 267 |
表7 智能体投标值
Table 7 Bidding values of agents
| 智能体 | T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | T9 | T10 |
|---|---|---|---|---|---|---|---|---|---|---|
| A1 | 188 | 203 | 54 | 219 | 143 | 41 | 91 | 101 | 256 | 265 |
| A2 | 183 | 197 | 49 | 213 | 138 | 35 | 86 | 95 | 251 | 260 |
| A3 | 195 | 210 | 61 | 226 | 150 | 48 | 98 | 108 | 263 | 272 |
| A4 | 184 | 198 | 50 | 214 | 139 | 36 | 87 | 96 | 252 | 261 |
| A5 | 190 | 204 | 56 | 220 | 145 | 42 | 93 | 102 | 258 | 267 |
| 任务 | 签约 智能体 | 签约时 投标轮次 | 任务 | 签约 智能体 | 签约时 投标轮次 |
|---|---|---|---|---|---|
| T1 | A4 | 3 | T6 | A2 | 2 |
| T2 | A4 | 3 | T7 | A1 | 4 |
| T3 | A4 | 3 | T8 | A2 | 7 |
| T4 | A5 | 4 | T9 | A3 | 8 |
| T5 | A5 | 4 | T10 | A3 | 8 |
表8 智能体投标结果
Table 8 Bidding results of agents
| 任务 | 签约 智能体 | 签约时 投标轮次 | 任务 | 签约 智能体 | 签约时 投标轮次 |
|---|---|---|---|---|---|
| T1 | A4 | 3 | T6 | A2 | 2 |
| T2 | A4 | 3 | T7 | A1 | 4 |
| T3 | A4 | 3 | T8 | A2 | 7 |
| T4 | A5 | 4 | T9 | A3 | 8 |
| T5 | A5 | 4 | T10 | A3 | 8 |
| 智能体 | 任务负载/km | 智能体 | 任务负载/km |
|---|---|---|---|
| A1 | 54.76 | A4 | 65.16 |
| A2 | 59.62 | A5 | 63.8 |
| A3 | 65.79 |
表9 智能体任务负载
Table 9 Task loads of agents
| 智能体 | 任务负载/km | 智能体 | 任务负载/km |
|---|---|---|---|
| A1 | 54.76 | A4 | 65.16 |
| A2 | 59.62 | A5 | 63.8 |
| A3 | 65.79 |

图13 智能体任务负载对比
Fig.13 Comparison of agents’ task loads
| 智能体 | 任务序列 |
|---|---|
| A1 | [6,3,7,8,5,1,2,4,9,10] |
| A2 | [10,3,1,9,5,8,6,7,2,4] |
| A3 | [3,6,5,7,4,8,9,1,10,2] |
| A4 | [2,7,10,9,6,5,4,1,3,8] |
| A5 | [9,5,8,3,10,4,1,2,5,6] |
表10 任务序列
Table 10 Task sequence
| 智能体 | 任务序列 |
|---|---|
| A1 | [6,3,7,8,5,1,2,4,9,10] |
| A2 | [10,3,1,9,5,8,6,7,2,4] |
| A3 | [3,6,5,7,4,8,9,1,10,2] |
| A4 | [2,7,10,9,6,5,4,1,3,8] |
| A5 | [9,5,8,3,10,4,1,2,5,6] |
| 任务 | 方案3 | 方案4 | 任务 | 方案3 | 方案4 |
|---|---|---|---|---|---|
| T1 | A4 | A4 | T6 | A1 | A1 |
| T2 | A4 | A4 | T7 | A1 | A1 |
| T3 | A2 | A2 | T8 | A5 | A5 |
| T4 | A3 | A3 | T9 | A5 | A5 |
| T5 | A1 | A1 | T10 | A2 | A2 |
表11 任务分配对比
Table 11 Comparision of task allocations
| 任务 | 方案3 | 方案4 | 任务 | 方案3 | 方案4 |
|---|---|---|---|---|---|
| T1 | A4 | A4 | T6 | A1 | A1 |
| T2 | A4 | A4 | T7 | A1 | A1 |
| T3 | A2 | A2 | T8 | A5 | A5 |
| T4 | A3 | A3 | T9 | A5 | A5 |
| T5 | A1 | A1 | T10 | A2 | A2 |
| [1] |
孙海文, 于邵祯, 江源, 等. 海上无人机蜂群目标威胁评估方法[J]. 兵工学报, 2022, 43(增刊2):32-39.
|
|
doi: 10.12382/bgxb.2022.B006 |
|
| [2] |
邱志明, 孟祥尧, 马焱, 等. 海上无人系统跨域协同运用与技术发展[J]. 水下无人系统学报, 2024, 32(2):184-193.
|
|
|
|
| [3] |
唐苏妍, 朱一凡, 李群, 等. 多Agent系统任务分配方法综述[J]. 系统工程与电子技术, 2010, 32(10):2155-2161.
|
|
doi: 10.3969/j.issn.1001-506X.2010.10.30 |
|
| [4] |
齐小刚, 李博, 范英盛, 等. 多约束下多无人机的任务规划研究综述[J]. 智能系统学报, 2020, 15(2):204-217.
|
|
|
|
| [5] |
马婵. 多无人机任务分配与航迹规划协同方法研究[D]. 石家庄: 河北科技大学, 2023.
|
|
|
|
| [13] |
|
| [14] |
|
| [15] |
万路军, 姚佩阳, 周翔翔, 等. 有人/无人作战智能体分布式协同目标分配方法[J]. 系统工程与电子技术, 2014, 36(2):278-287.
|
|
|
|
| [16] |
张梦颖, 王蒙一, 王晓东, 等. 基于改进合同网的无人机群协同实时任务分配问题研究[J]. 航空兵器, 2019, 26(4):38-46.
|
|
|
|
| [17] |
王强, 贾强. 基于改进合同网的多无人机动态任务分配[J/OL]. 火炮发射与控制学报, 2023. https://doi.org/10.19323/j.issn.1673-6524.202304010.
|
|
|
|
| [18] |
唐安如. 无人机航迹规划与任务分配方法研究[D]. 无锡: 江南大学, 2023.
|
|
|
|
| [19] |
赵明. 多无人机系统的协同目标分配和航迹规划方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2016.
|
| [6] |
周晶, 赵晓哲, 许震, 等. 基于D-NSGA-Ⅲ算法的无人机群高维多目标任务分配方法[J]. 系统工程与电子技术, 2021, 43(5):1240-1247.
doi: 10.12305/j.issn.1001-506X.2021.05.11 |
|
doi: 10.12305/j.issn.1001-506X.2021.05.11 |
|
| [7] |
侯鹏, 葛玉雪, 裴扬, 等. 基于毁伤评估结果的无人机对地攻击任务分配方法[J]. 兵工学报, 2025, 46(2):240212.
doi: 10.12382/bgxb.2024.0212 |
|
|
|
| [8] |
薛雅丽, 李寒雁, 欧阳权, 等. 战场环境下遗传黏菌算法的多机协同任务分配[J]. 浙江大学学报(工学版), 2024, 58(8):1748-1756.
|
|
|
|
| [9] |
胡月. 有人/无人机协同作战任务分配与航迹规划研究[D]. 南京: 南京航空航天大学, 2020.
|
|
|
|
| [10] |
|
| [11] |
|
| [12] |
|
| [19] |
|
| [20] |
霍凤财, 迟金, 黄梓健, 等. 移动机器人路径规划算法综述[J]. 吉林大学学报(信息科学版), 2018, 36(6):639-647.
|
|
|
|
| [21] |
|
| [22] |
|
| [23] |
doi: 10.1109/tip.2003.819861 pmid: 15376593 |
| [24] |
刘跃峰, 张安. 有人机/无人机编队协同任务分配方法[J]. 系统工程与电子技术, 2010, 32(3):584-588.
|
|
|
|
| [25] |
邓启波. 多无人机协同任务规划技术研究[D]. 北京: 北京理工大学, 2014.
|
|
|
|
| [26] |
|
| [1] | 侯天乐, 毕文豪, 黄湛钧, 李铭浩, 张安. 基于事件触发的多智能体系统预设时间编队控制[J]. 兵工学报, 2025, 46(4): 240292-. |
| [2] | 刘富樯, 周伦, 刘中阳, 皮阳军, 蒲华燕, 罗均. 基于三支决策和遗传算法的动态武器目标分配[J]. 兵工学报, 2025, 46(3): 240281-. |
| [3] | 李松, 麻壮壮, 张蕴霖, 邵晋梁. 基于安全强化学习的多智能体覆盖路径规划[J]. 兵工学报, 2023, 44(S2): 101-113. |
| [4] | 张继雄, 李宗刚, 宁小刚, 陈引娟. 动态事件触发下一般线性多智能体系统完全分布式一致性控制[J]. 兵工学报, 2023, 44(S2): 223-234. |
| [5] | 刘兴宇, 郭荣化, 任成才, 闫超, 常远, 周晗, 相晓嘉. 基于身份匈牙利算法的无人机蜂群分布式目标分配方法[J]. 兵工学报, 2023, 44(9): 2824-2835. |
| [6] | 张安, 徐双飞, 毕文豪, 徐晗. 空地多目标攻击武器-目标分配与制导序列优化[J]. 兵工学报, 2023, 44(8): 2233-2244. |
| [7] | 褚凯轩, 常天庆, 张雷. 基于改进人工蜂群算法的地面作战武器-目标分配[J]. 兵工学报, 2023, 44(7): 2171-2183. |
| [8] | 于镝, 王亚洁, 赵博, 刘琼. 动态事件触发机制下多智能体系统固定时间跟踪[J]. 兵工学报, 2023, 44(5): 1403-1413. |
| [9] | 李烨, 郑纯, 马长胜, 邱荣贤. 基于拦截效率最大化的高功率微波武器系统与中近程防空武器协同作战目标分配模型[J]. 兵工学报, 2023, 44(11): 3489-3497. |
| [10] | 沈宇婷, 孟新, 高跃清. 面向无人集群目标分配的层次化信息传播方法[J]. 兵工学报, 2023, 44(10): 3006-3025. |
| [11] | 孔国杰, 冯时, 于会龙, 巨志扬, 龚建伟. 无人集群系统协同运动规划技术综述[J]. 兵工学报, 2023, 44(1): 11-26. |
| [12] | 杨华东, 周末, 孙海文. 舰艇平台机动航线与导弹攻击航路一体化设计方法[J]. 兵工学报, 2022, 43(S2): 7-12. |
| [13] | 朱建文, 赵长见, 李小平, 包为民. 基于强化学习的集群多目标分配与智能决策方法[J]. 兵工学报, 2021, 42(9): 2040-2048. |
| [14] | 张进, 郭浩, 陈统. 基于可适应匈牙利算法的武器-目标分配问题[J]. 兵工学报, 2021, 42(6): 1339-1344. |
| [15] | 盛亮, 邱志明, 于邵祯, 焦俊杰. 自主水下航行器多终点航路规划的距离正则化混合水平集算法研究[J]. 兵工学报, 2020, 41(4): 750-762. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4