
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (5): 240741-.doi: 10.12382/bgxb.2024.0741
• • 上一篇
张旭
收稿日期:2024-08-28
上线日期:2025-05-07
基金资助:ZHANG Xu
Received:2024-08-28
Online:2025-05-07
摘要:
针对水下高动态航行体运动特征难以识别的问题,提出一种基于水声测量的运动参数序列估计方法。该方法通过逐点解算得到位置、速度序列,再进行函数化重构和参数辨识,消除随机误差引起的数据抖动,实现平稳、连续的序贯参数获取。在仿真分析中,模拟了边长为数百米的海底四元阵对数十米深度垂向航行过程的测量,参数估计结果的垂向精度相对于逐点解算结果明显提升,位置和速度均方根误差(Root Mean Square Error,RMSE)分别减小27.8%和47.2%。经大样本计算,参数序列估计值趋近于真值,垂向位置和速度偏差分别为0.042m和0.056m/s。水池试验结果表明,物理模型的高动态航行参数估计结果与惯性传感器数据相吻合,垂向位置和速度RMSE分别为0.024m和0.141m/s。新方法可为水下高动态航行体运动性能检验提供准确、平滑、连续的参数估计结果,在海上测试中有一定工程应用前景。
中图分类号:
张旭. 基于声学测量的水下高动态航行参数估计[J]. 兵工学报, 2025, 46(5): 240741-.
ZHANG Xu. Motion Parameter Estimation of High Dynamic Underwater Vehicle Based on Acoustic Measurement[J]. Acta Armamentarii, 2025, 46(5): 240741-.
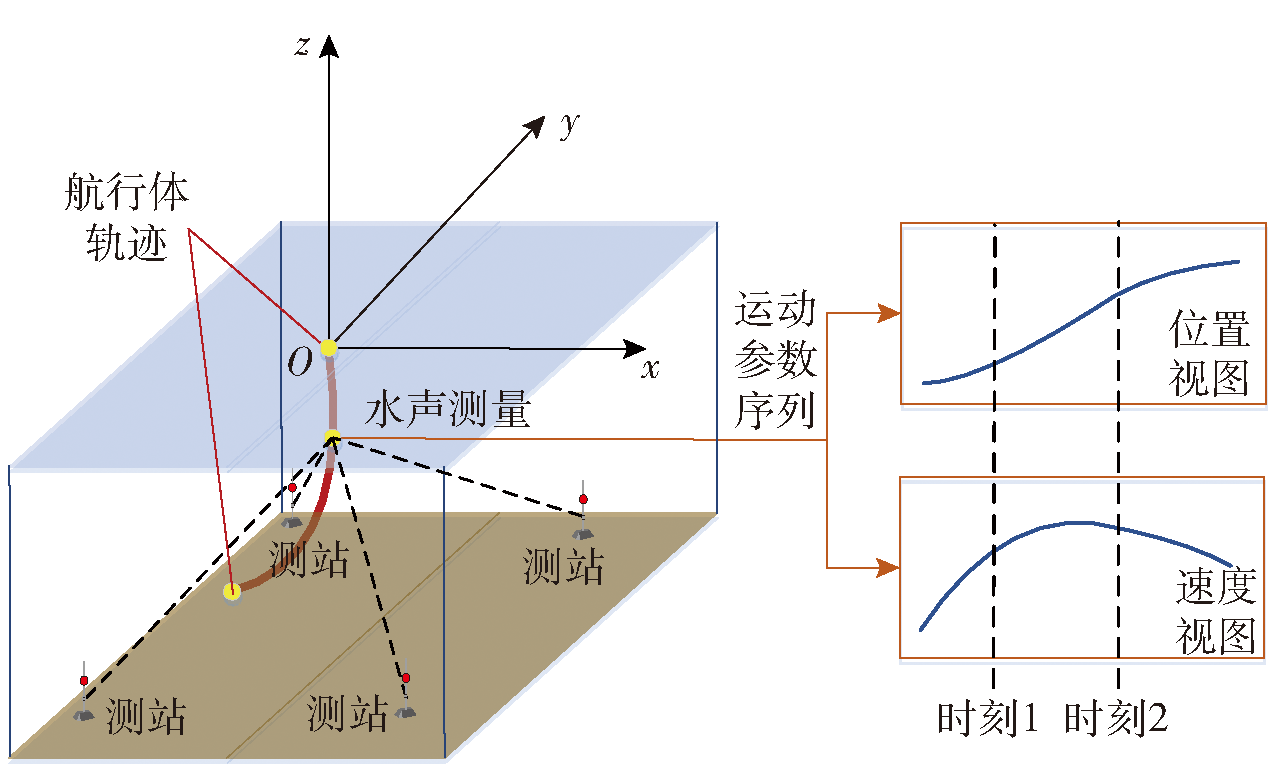
图1 水下高动态航行体运动参数测量示意图
Fig.1 Schematic diagram of motion parameter measurement for the high dynamic underwater vehicle
| x轴方向参数 | y轴方向参数 | z轴方向参数 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| a1 | b1 | c1 | d1 | a2 | b2 | c2 | d2 | a3 | b3 | c3 | d3 |
| 4.00 | -8.00 | 1.00 | -0.50 | -0.17 | 0.50 | -0.01 | 0.00 | -21.67 | 80.00 | -60.00 | -20.00 |
表1 模拟航行轨迹的多项式函数系数
Table 1 Polynomial function parameters of the simulated motion trajectory
| x轴方向参数 | y轴方向参数 | z轴方向参数 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| a1 | b1 | c1 | d1 | a2 | b2 | c2 | d2 | a3 | b3 | c3 | d3 |
| 4.00 | -8.00 | 1.00 | -0.50 | -0.17 | 0.50 | -0.01 | 0.00 | -21.67 | 80.00 | -60.00 | -20.00 |
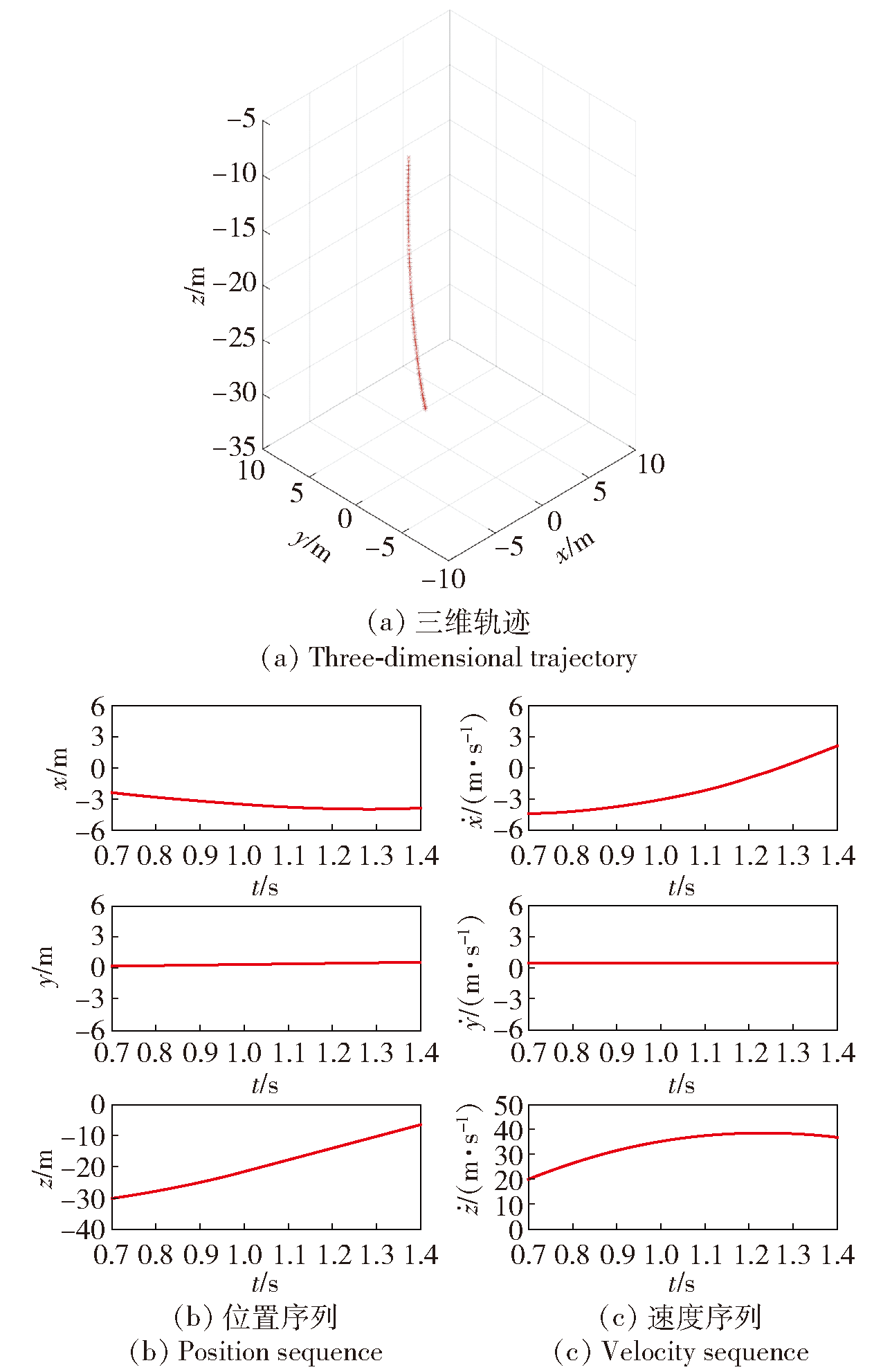
图2 模拟的航行轨迹及参数序列
Fig.2 Simulated motion trajectory and parameter sequence
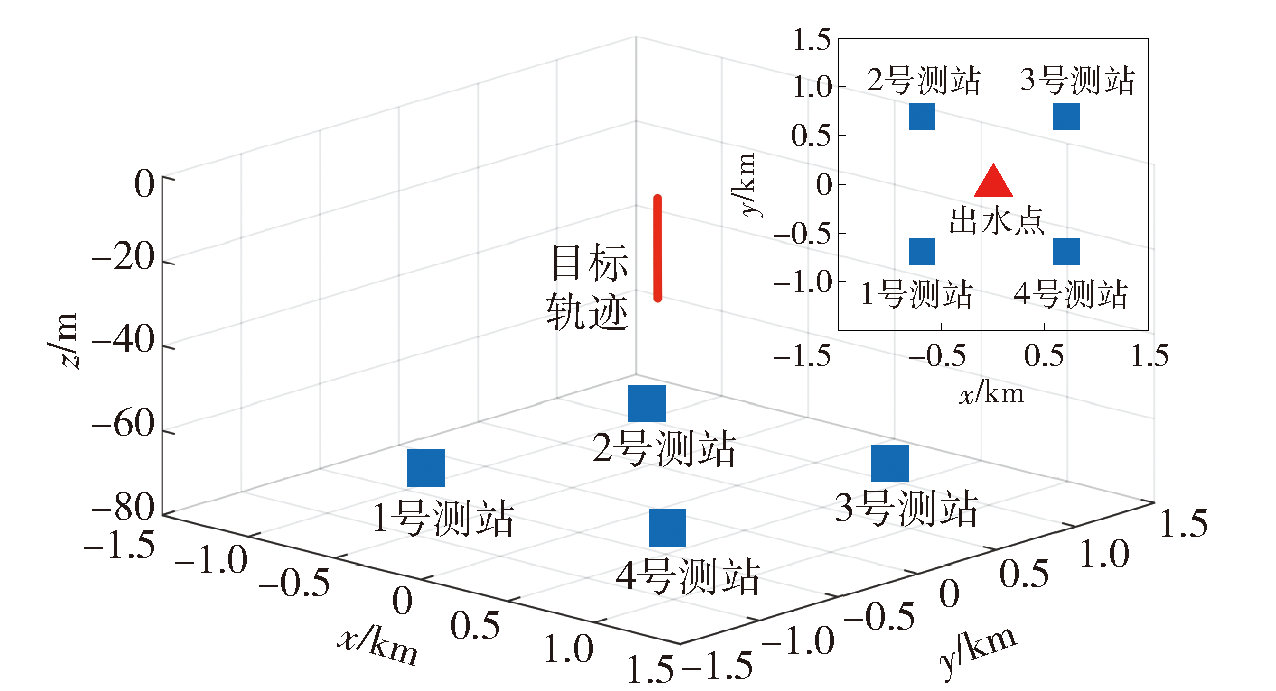
图3 航行轨迹与测站位置分布图
Fig.3 Schematic diagram of target trajectory and observational stations

图4 单次观测的各测站测量要素曲线
Fig.4 Curves of measuring element in each observational station under once observation condition

图5 单次观测的航行轨迹及参数序列
Fig.5 Motion trajectory and parameter sequence under once observation condition
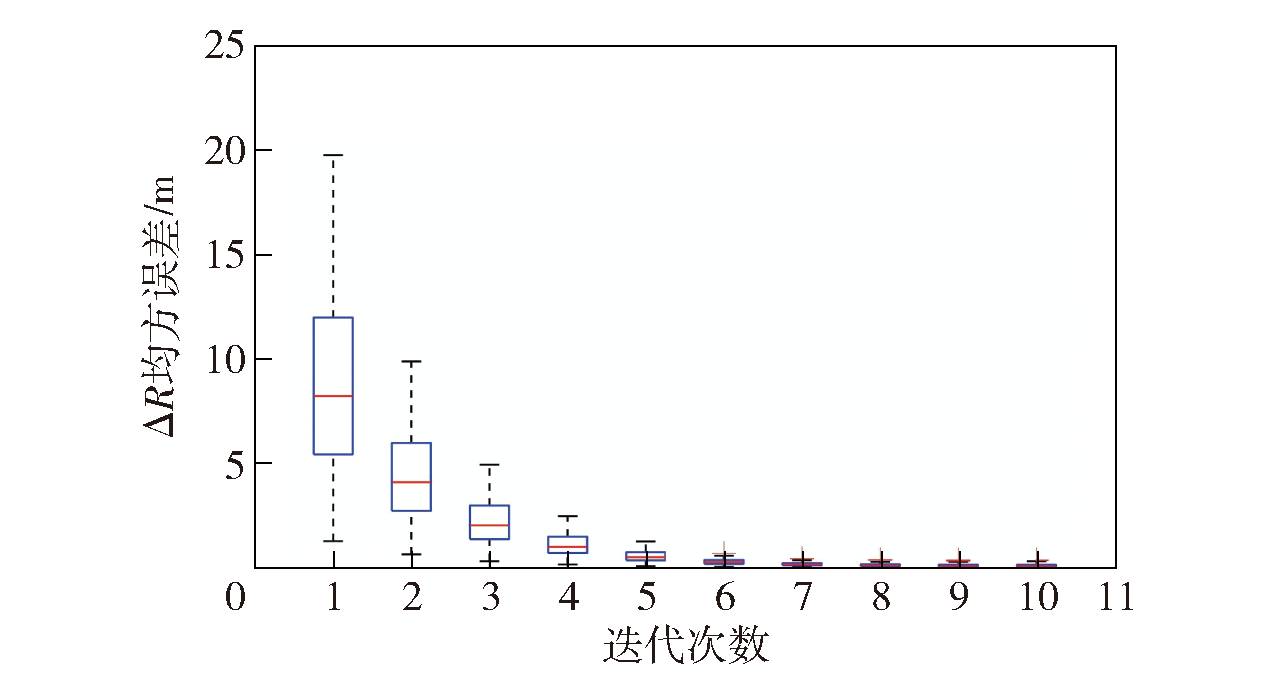
图6 斜距MSE迭代箱形图
Fig.6 MSE box plot of slant range

图7 大样本参数序列的RMSE曲线
Fig.7 RMSE curves of parameter sequence based on large samples
| x轴方向参数 | y轴方向参数 | z轴方向参数 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| a1 | b1 | c1 | d1 | a2 | b2 | c2 | d2 | a3 | b3 | c3 | -d3 |
| 4.00 | -7.99 | 0.99 | -0.49 | -0.17 | 0.51 | -0.03 | 0.00 | -21.73 | 80.19 | 60.11 | -20.05 |
表2 基于大样本系数辨识的多项式函数系数
Table 2 Polynomial function parameters obtained by coefficient identification based on large samples
| x轴方向参数 | y轴方向参数 | z轴方向参数 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| a1 | b1 | c1 | d1 | a2 | b2 | c2 | d2 | a3 | b3 | c3 | -d3 |
| 4.00 | -7.99 | 0.99 | -0.49 | -0.17 | 0.51 | -0.03 | 0.00 | -21.73 | 80.19 | 60.11 | -20.05 |

图8 水池试验航行轨迹与测站位置分布图
Fig.8 Schematic diagram of motion trajectory and observational stations in the water-tank test

图9 水池试验的航行轨迹及参数序列
Fig.9 Motion trajectory and parameter sequence in the water-tank test
| [1] |
|
| [2] |
施瑶, 任锦毅, 高山, 等. 航行体水下连续发射尾涡遭遇与运动干扰特性[J]. 兵工学报, 2023, 44(10): 3195-3203.
doi: 10.12382/bgxb.2022.0616 |
|
doi: 10.12382/bgxb.2022.0616 |
|
| [3] |
刘方, 肖金石, 韦建明, 等. 水下连续发射弹体干扰特性及发射时序优化[J]. 兵工学报, 2024, 45(1): 197-205.
doi: 10.12382/bgxb.2022.0576 |
|
doi: 10.12382/bgxb.2022.0576 |
|
| [4] |
|
| [5] |
杨晓光, 党建军, 王鹏, 等. 波浪对航行体高速入水载荷特性影响[J]. 兵工学报, 2022, 43(2): 355-362.
|
|
doi: 10.3969/j.issn.1000-1093.2022.02.013 |
|
| [6] |
|
| [7] |
姚熊亮, 赵斌, 马贵辉. 跨介质航行体出水问题研究现状与展望[J]. 航空学报, 2024, 45(14): 029598.
|
|
|
|
| [8] |
张旭, 李万鹏. 跨介质出水航行器水下信息获取技术发展与展望[J]. 水下无人系统学报, 2024, 32(4): 659-667.
|
|
|
|
| [9] |
孙大军, 侯开阳, 滕婷婷, 等. 空时多普勒频移域运动小目标的抗干扰探测方法[J]. 声学学报, 2022, 47(2): 161-174.
|
|
|
|
| [10] |
刘方, 侯超强, 翟涛涛, 等. 运动声源多普勒畸变信号自适应校正方法[J]. 声学学报, 2022, 47(6): 820-831.
|
|
|
|
| [11] |
孙思博, 明瑞和, 杨卓, 等. 针对周期偏移声信标的二阶高精度水声定位模型[J]. 声学学报, 2023, 48(1): 41-49.
|
|
|
|
| [12] |
徐文, 鄢社锋, 季飞, 等. 海洋信息获取、传输、处理及融合前沿研究评述[J]. 中国科学: 信息科学, 2016, 46(8): 1053-1085.
|
|
|
|
| [13] |
|
| [14] |
张旭, 孙翱, 韩旭, 等. 水下垂向运动目标的海底多基站声定位方法及精度分析[J]. 声学学报, 2019, 44(2): 155-169.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
doi: 10.1109/ACCESS.2019.2934737 |
| [18] |
孙大军, 郑翠娥, 张居成, 等. 水声定位导航技术的发展与展望[J]. 中国科学院院刊, 2019, 34(3): 331-338.
|
|
|
|
| [19] |
|
| [20] |
|
| [21] |
贾天一, 高婧洁, 申晓红, 等. 声速不确定条件下的运动水下航行器自定位[J]. 系统工程与电子技术, 2022, 44(9): 2699-2706.
doi: 10.12305/j.issn.1001-506X.2022.09.01 |
|
doi: 10.12305/j.issn.1001-506X.2022.09.01 |
|
| [22] |
马顺南, 路宇, 王炯琦, 等. 基于组合圆锥构型的水下声定学定位系统布站优化[J]. 弹道学报, 2024, 36(2): 10-20.
|
|
|
|
| [23] |
|
| [24] |
孙旭, 李然威, 周利生, 等. 利用组合双曲调频信号的目标径向速度测量与测距去偏[J]. 声学学报, 2024, 49(5): 979-989.
|
|
|
|
| [25] |
|
| [26] |
|
| [27] |
杨元喜, 刘焱雄, 孙大军, 等. 海底大地基准网建设及其关键技术[J]. 中国科学: 地球科学, 2020, 50(7):1-10.
|
|
|
|
| [28] |
孙大军, 欧阳雨洁, 韩云峰, 等. 海底大地秩亏基准网快速标校方法[J]. 声学学报, 2023, 48(3): 506-514.
|
|
|
|
| [29] |
冯旭东, 邢尧, 王炯琦, 等. 基于最优模型选择的多信标长基线定位系统误差辨识方法[J]. 弹道学报, 2024, 36(1): 85-96.
|
|
|
|
| [30] |
张瑜, 吴凯, 郭杰, 等. 基于数据质量评估的自适应序贯航迹关联算法[J]. 系统工程与电子技术, 2022, 44(11): 3477-3485.
doi: 10.12305/j.issn.1001-506X.2022.11.23 |
|
doi: 10.12305/j.issn.1001-506X.2022.11.23 |
|
| [31] |
|
| [1] | 李豪天, 崔欣雨, 刘梦真, 黄广炎, 吕中杰, 张宏. 基于孪生网络和区域注意力机制的球形爆炸破片毁伤效应识别研究[J]. 兵工学报, 2024, 45(12): 4259-4271. |
| [2] | 张洋洋, 赵洪山, 彭伟, 胡春东, 杨志刚, 董瀚. 国内外防弹标准防护等级的研究与对比[J]. 兵工学报, 2022, 43(9): 2017-2036. |
| [3] | 赵奇峰, 李运良, 李进, 张向荣, 朱玉荣, 谭书舜, 张子栋. 基于应变测试系统的二级轻气炮活塞运动测量[J]. 兵工学报, 2021, 42(8): 1803-1808. |
| [4] | 李志明, 范锦彪. 基于无速度参数目标函数的弹着点定位方法[J]. 兵工学报, 2021, 42(4): 871-877. |
| [5] | 许仁翰, 周钇捷, 狄长安. 基于高速成像的爆炸温度场测试方法[J]. 兵工学报, 2021, 42(3): 640-647. |
| [6] | 卢莉萍, 郑潇. 基于旋转反射镜光学成像的动态目标跟踪方法[J]. 兵工学报, 2020, 41(8): 1558-1565. |
| [7] | 邱文昊, 连光耀, 杨金鹏, 黄考利. 基于多影响因子和重要度的故障样本优选[J]. 兵工学报, 2019, 40(12): 2551-2559. |
| [8] | 王康, 史贤俊, 秦亮, 聂新华, 龙玉峰. 基于Bayes小子样理论和序贯网图检验的武器装备测试性验证试验方案设计[J]. 兵工学报, 2019, 40(11): 2319-2328. |
| [9] | 宫志华, 段鹏伟, 刘洋, 陈春江, 吕海东. 多样本遗传算法在武器外弹道组网试验中的应用[J]. 兵工学报, 2019, 40(7): 1503-1510. |
| [10] | 彭澎, 狄长安, 张永建, 陈昊飞, 宋炜, 尹强. 基于可调谐半导体激光吸收光谱的武器发射气体浓度在线检测研究[J]. 兵工学报, 2018, 39(7): 1397-1403. |
| [11] | 王啸, 韩太林, 张恩奎, 张永立, 刘轩, 宫玉琳. 基于烟花算法的压阻式压力传感器动态补偿方法[J]. 兵工学报, 2017, 38(11): 2226-2233. |
| [12] | 李丹, 胡晓光. 武器装备实时测控系统冗余容错方法研究[J]. 兵工学报, 2016, 37(11): 2066-2074. |
| [13] | 李海广, 潘宏侠, 任海锋. 基于冲击响应谱特征提取的自动机裂纹故障诊断[J]. 兵工学报, 2016, 37(9): 1744-1752. |
| [14] | 宫鹏涵, 周克栋, 康小勇, 赫雷. 基于高速摄影和微惯性姿态测量的人-枪运动特性测试研究[J]. 兵工学报, 2015, 36(12): 2224-2230. |
| [15] | 张樨, 李杰, 侯利朋, 祝敬德, 秦丽. 半捷联惯导系统轴向角度安装误差分析与补偿[J]. 兵工学报, 2015, 36(7): 1222-1227. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4