
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (9): 2568-2579.doi: 10.12382/bgxb.2023.0445
所属专题: 智能系统与装备技术
许威1,2,3, 苏波1,2,3,*( ), 江磊1,2,3, 闫曈1,2,3, 许鹏1,2,3, 王志瑞1,2,3, 邱天奇1,2,3
), 江磊1,2,3, 闫曈1,2,3, 许鹏1,2,3, 王志瑞1,2,3, 邱天奇1,2,3
收稿日期:2023-05-18
上线日期:2023-07-24
通讯作者:
基金资助:
XU Wei1,2,3, SU Bo1,2,3,*(), JIANG Lei1,2,3, YAN Tong1,2,3, XU Peng1,2,3, WANG Zhirui1,2,3, QIU Tianqi1,2,3
Received:2023-05-18
Online:2023-07-24
摘要:
足式机器人作为典型的地面移动机器人之一,其越野能力和智能水平不断提升,将足式越野技术与集群技术深入融合,是未来无人化装备发展的重要趋势之一。首先分析了群体仿生学机理、单体足式越野机器人、集群感知与协作和集成演示与应用等方面的研究现状,提出了足式越野机器人集群系统面临的技术挑战和科学问题,从足式越野机器人高机动越野、群体自组织机理与集群协作决策控制、群体协同态势感知和通讯自组网与应用验证四个方面深入剖析了亟待解决的核心关键技术,最后对足式越野机器人集群在军民领域的发展前景提出了设想和建议。
中图分类号:
许威, 苏波, 江磊, 闫曈, 许鹏, 王志瑞, 邱天奇. 足式越野机器人集群系统关键技术与应用展望[J]. 兵工学报, 2023, 44(9): 2568-2579.
XU Wei, SU Bo, JIANG Lei, YAN Tong, XU Peng, WANG Zhirui, QIU Tianqi. Key Technologies and Application Prospects of Off-road Legged Robot Swarm System[J]. Acta Armamentarii, 2023, 44(9): 2568-2579.

图1 足式越野机器人集群密林作战示意图
Fig.1 Quadruped robot swarm combat in dense forest

图2 山地四足仿生无人平台
Fig.2 Mountain quadruped bionic unmanned platform

图3 央视四足机器人专题报道
Fig.3 Special report on quadruped robot by CCTV

图4 Panda5 四足仿生机器人
Fig.4 Panda5 quadruped bionic robot

图5 OFFSET想象图(Northrop Grumman)
Fig.5 Artist impression of OFFSET (Northrop Grumman)
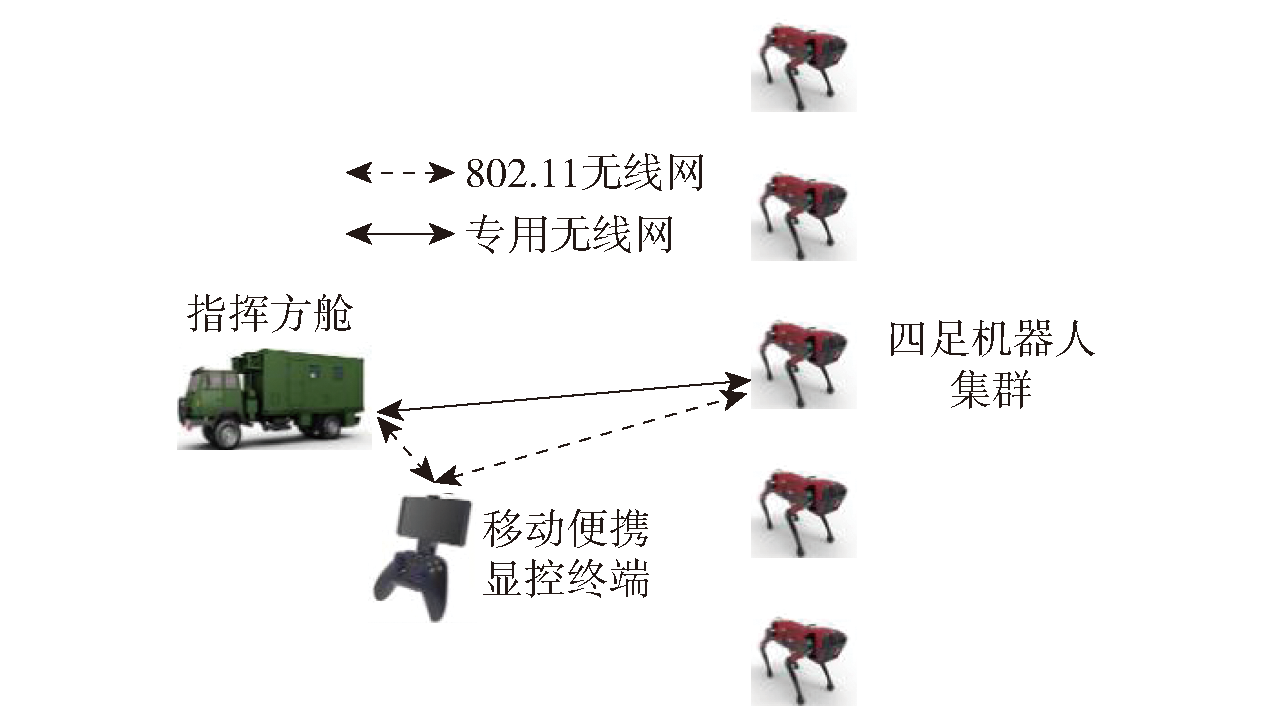
图6 无线通信及网络示意图
Fig.6 Wireless communication and network diagram

图7 四足机器人发展概况
Fig.7 Overview of the development ofquadruped robot

图8 四足机器人群体协同技术
Fig.8 Quadruped robot swarm collaboration technology

图9 人工智能技术与四足机器人技术融合
Fig.9 Integration of AI and Quadruped robot
| [1] |
|
| [2] |
pmid: 12297066 |
| [3] |
doi: 10.1038/s41586-018-0422-6 |
| [4] |
|
| [5] |
|
| [6] |
doi: 10.1007/s11721-011-0053-0 URL |
| [7] | |
|
|
|
| [8] |
|
| [9] |
doi: 10.1177/0959651811402275 URL |
| [10] |
|
| [11] |
|
| [12] |
柴汇, 孟健, 荣学文, 等. 高性能液压驱动四足机器人SCalf的设计与实现[J]. 机器人, 2014, 36(4):385-391.
|
|
|
|
| [13] |
doi: 10.3901/CJME.2015.1212.146 URL |
| [14] |
|
| [15] |
doi: 10.3389/frobt.2018.00051 pmid: 33659276 |
| [16] |
华子森. 面向四足机器人的被动柔顺液压伺服作动器设计, 分析与应用[D]. 济南: 山东大学, 2020.
|
|
|
|
| [17] |
doi: 10.1109/TRO.2016.2640183 URL |
| [18] |
|
| [19] |
|
| [20] |
doi: 10.1126/scirobotics.abc5986 URL |
| [21] |
doi: 10.1126/scirobotics.abk2822 URL |
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
doi: 10.1177/0278364906065378 URL |
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
doi: 10.1016/j.oceaneng.2019.04.098 URL |
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
pmid: 10060237 |
| [39] |
doi: 10.1109/TAC.2007.895842 URL |
| [40] |
doi: 10.1023/B:AURO.0000033970.96785.f2 URL |
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
doi: 10.1038/s41586-019-1724-z |
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
李超, 王瑞星, 黄建忠, 等. 稀疏奖励下基于强化学习的无人集群自主决策与智能协同[J]. 兵工学报, 2023, 44(6): 1537-1546.
doi: 10.12382/bgxb.2022.0177 |
|
doi: 10.12382/bgxb.2022.0177 |
|
| [51] |
孔国杰, 冯时, 于会龙, 等. 无人集群系统协同运动规划技术综述[J]. 兵工学报, 2023, 44(1):11-26.
doi: 10.12382/bgxb.2022.0930 |
|
doi: 10.12382/bgxb.2022.0930 |
|
| [52] |
|
| [53] |
doi: 10.1126/scirobotics.aat3536 URL |
| [54] |
doi: 10.1038/s42256-021-00341-y |
| [55] |
doi: 10.1126/scirobotics.abm5954 URL |
| [56] |
谢伟, 陶浩, 龚俊斌, 等. 海上无人系统集群发展现状及关键技术研究进展[J]. 中国舰船研究, 2021, 16(1): 7-17, 31.
|
|
|
|
| [57] |
李易珊. 云洲智能:无人系统领航深蓝探索[J]. 海洋与渔业, 2018(8): 68-69.
|
|
|
|
| [58] |
杨翊, 周星群, 胡志强, 等. 基于视觉定位的水下机器人无通信高精度编队技术研究[J]. 数字海洋与水下攻防, 2022(1): 50-58.
|
|
|
|
| [59] |
喻俊志, 周子烨, 刘金存. 多自主水下机器人系统研究进展与分析[J]. 信息与控制, 2021, 50(2): 129-140.
doi: 10.13976/j.cnki.xk.2021.0572 |
|
doi: 10.13976/j.cnki.xk.2021.0572 |
|
| [60] |
张伟, 王乃新, 魏世琳, 等. 水下无人潜航器集群发展现状及关键技术综述[J]. 哈尔滨工程大学学报, 2020, 41(2): 289-297.
|
|
|
|
| [61] |
doi: 10.1109/JPROC.2021.3072740 URL |
| [62] |
张建东, 王鼎涵, 杨啟明, 等. 基于分层强化学习的无人机空战多维决策[J]. 兵工学报, 2023, 44(6): 1547-1563.
doi: 10.12382/bgxb.2022.0711 |
|
doi: 10.12382/bgxb.2022.0711 |
| [1] | 刘志峰,张雪,栗苹,张继豪,李思琪,王卫东,龚鹏. 基于D2D通信和虚拟MIMO的飞行器集群网络传输方案设计[J]. 兵工学报, 2024, 45(4): 1141-1147. |
| [2] | 曹子建, 孙泽龙, 闫国闯, 傅妍芳, 杨博, 李秦洁, 雷凯麟, 高领航. 基于强化学习的无人机集群对抗策略推演仿真[J]. 兵工学报, 2023, 44(S2): 126-134. |
| [3] | 薛建强, 史彦军, 李波. 面向无人集群的边缘计算技术综述[J]. 兵工学报, 2023, 44(9): 2546-2555. |
| [4] | 严钰文, 毕文豪, 张安, 张百川. 基于序列生成对抗网络的无人机集群任务分配方法[J]. 兵工学报, 2023, 44(9): 2672-2684. |
| [5] | 王孟阳, 张栋, 唐硕, 许斌, 赵军民. 基于动态联盟策略的无人机集群在线任务规划方法[J]. 兵工学报, 2023, 44(8): 2207-2223. |
| [6] | 仝欣, 李旭, 刘颖. 面向高轨卫星的探测集群接入机制设计[J]. 兵工学报, 2023, 44(8): 2354-2367. |
| [7] | 王维佳, 王玉冰, 田瑾, 毛昭军, 杜琳琳. 航空集群一发多收有源定位最优构型[J]. 兵工学报, 2023, 44(6): 1655-1664. |
| [8] | 穆巍炜, 何滨兵, 齐尧, 李子先, 张志超, 徐友春. 基于环形阵列的地面无人装备集群通信干扰抑制[J]. 兵工学报, 2023, 44(5): 1414-1421. |
| [9] | 毕文豪, 王炤晰, 吴伟, 张安. 基于公共品博弈的无人机集群自主协同机制[J]. 兵工学报, 2023, 44(11): 3407-3421. |
| [10] | 曹昊哲, 刘全攀. 基于半直接法的无人集群协同视觉SLAM算法[J]. 兵工学报, 2023, 44(11): 3345-3358. |
| [11] | 张琦, 葛玉雪, 李攀, 康淇钧, 裴扬. 基于ABMS的全光化无人机集群体系贡献率评估方法[J]. 兵工学报, 2023, 44(11): 3422-3435. |
| [12] | 李佳键, 史彦军, 杨雨, 李波, 赵熙俊. 无人集群作战任务的多智能体强化学习卸载决策[J]. 兵工学报, 2023, 44(11): 3295-3309. |
| [13] | 沈宇婷, 孟新, 高跃清. 面向无人集群目标分配的层次化信息传播方法[J]. 兵工学报, 2023, 44(10): 3006-3025. |
| [14] | 马也, 范文慧, 常天庆. 基于智能算法的无人集群防御作战方案优化方法[J]. 兵工学报, 2022, 43(6): 1415-1425. |
| [15] | 黄文俊, 李旭, 杨明强, 梁亚楠, 吴贺禹. 无线自组网分布式编码域非正交多址机制性能分析[J]. 兵工学报, 2022, 43(12): 3082-3092. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4