
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (1): 241-252.doi: 10.12382/bgxb.2022.0523
刘谦1, 张祝新2,*( ), 赵丁选1, 王辉1, 秦占永1
), 赵丁选1, 王辉1, 秦占永1
收稿日期:2022-06-13
上线日期:2024-01-30
通讯作者:
基金资助:
LIU Qian1, ZHANG Zhuxin2,*(), ZHAO Dingxuan1, WANG Hui1, QIN Zhanyong1
Received:2022-06-13
Online:2024-01-30
摘要:
针对现役综合系留和转运系统(Aircraft Ship Integrated Secure and Traverse,ASIST)存在的捕获冲击力大、转运时系统能耗高的问题,设计舰载直升机电驱动助降装置。通过分析助降装置的工况得出助降装置在执行捕获与转运任务时的性能要求,据此给出电驱动助降装置传动系统的设计方案。基于功率键合图理论建立传动系统的动力学模型,并与液压驱动助降装置进行对比仿真实验。仿真结果表明:电驱动助降装置的捕获速度降低约92%,捕获时最大冲击力降低约94%,能够在21kN的外负载作用下执行直升机转运任务,在执行转运任务时能耗降低约29%,该成果对于拓宽ASIST的使用范围、降低系统能耗具有重要意义;所引入的兼顾系统动态特性与能耗特性的建模方法,为其余复杂机械系统的动力学建模提供了参考。
中图分类号:
刘谦, 张祝新, 赵丁选, 王辉, 秦占永. 舰载直升机电驱动助降装置及其关键特性分析[J]. 兵工学报, 2024, 45(1): 241-252.
LIU Qian, ZHANG Zhuxin, ZHAO Dingxuan, WANG Hui, QIN Zhanyong. Electric Landing Assist Device of Shipborne Helicopters and Its Key Characteristics Analysis[J]. Acta Armamentarii, 2024, 45(1): 241-252.

图1 ASIST系统的组成示意图
Fig.1 Schematic diagram of ASIST

图2 助降装置的捕获工况示意图
Fig.2 Capture diagram of landing assist device

图3 冲击力曲线(2.5m/s)
Fig.3 Impact curve (2.5m/s)

图4 冲击力曲线(0.2m/s)
Fig.4 Impact curve (0.2m/s)

图5 助降装置的转运工况示意图
Fig.5 Schematic diagram of transshipment of landing assist device

图6 连体坐标系
Fig.6 Connected coordinate system

图7 受力分析图
Fig.7 Force analysis diagram
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| θ/(°) | 10 | g/(m·s-2) | 9.8 |
| aX/(m·s-2) | 1 | aZ/(m·s-2) | 0.5 |
| MH/kg | 6 000 | f | 0.02 |
| L/m | 7 | LH/m | 0.9 |
| ρ/(kg·m-3) | 1.29 | vW/(m·s-1) | 12 |
| AXCW | 20 | LW/m | 0.9 |
| LE/m | 0.9 | Lbc/m | 3.5 |
表1 三级海情下的运动参数
Table 1 Motion parameters under level-3 sea conditions
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| θ/(°) | 10 | g/(m·s-2) | 9.8 |
| aX/(m·s-2) | 1 | aZ/(m·s-2) | 0.5 |
| MH/kg | 6 000 | f | 0.02 |
| L/m | 7 | LH/m | 0.9 |
| ρ/(kg·m-3) | 1.29 | vW/(m·s-1) | 12 |
| AXCW | 20 | LW/m | 0.9 |
| LE/m | 0.9 | Lbc/m | 3.5 |

图8 电驱动助降装置的传动系统原理图
Fig.8 Schematic diagram of transmission system for electric landing assist device
| 名称 | 符号 | 特征方程 | 键合图模型 |
|---|---|---|---|
| 阻性元件 | R | e(t)=Rf(t) | |
| 容性元件 | C | e(t)= | |
| 惯性元件 | I | f(t)= | |
| 流源 | Sf | f(t)=Sf | |
| 势源 | Se | e(t)=Se | |
| 转换器 | TF | | |
| 1结 | 1 | | |
| 0结 | 0 | |
表2 特性方程和键合图模型
Table 2 Characteristic equation and bond graph model
| 名称 | 符号 | 特征方程 | 键合图模型 |
|---|---|---|---|
| 阻性元件 | R | e(t)=Rf(t) | |
| 容性元件 | C | e(t)= | |
| 惯性元件 | I | f(t)= | |
| 流源 | Sf | f(t)=Sf | |
| 势源 | Se | e(t)=Se | |
| 转换器 | TF | | |
| 1结 | 1 | | |
| 0结 | 0 | |

图9 转运时的键合图模型
Fig.9 Bond graph model for transshipment

图10 捕获时的键合图模型
Fig.10 Bond graph model for capture

图11 机械爪捕获速度曲线
Fig.11 Capture velocity curve of mechanical claw

图12 余弦函数速度规划曲线
Fig.12 Velocity planning curve

图13 仿真原理图
Fig.13 Schematic diagram of simulation
| 传动部件 | 参数 | 数值 |
|---|---|---|
| 电机 | 输出转速Sf/(rad·s-1) | |
| 转动转化为平动TF/(rad·m-1) | 20.61 | |
| 同步带传动 | 同步带刚度C/(m·N-1) | 1.92×10-7 |
| 平动转化为转动TF/(m·rad-1) | 48.52×10-3 | |
| 减速机输入端 | 转动惯量I/(kg·m2) | 4.25×10-3 |
| 转动阻尼R/(N·m·s) | 4.7×10-2 | |
| 减速机 | 减速比TF | 40 |
| 丝杆刚度C/(rad·N-1·m-1) | 7.8×10-6 | |
| 减速机输出端 | 转动惯量I/(kg·m2) | 22.95×10-3 |
| 转动阻尼R/(N·m·s) | 5.3×10-3 | |
| 动滑轮 | 质量I/kg | 35.75 |
| 转动转化为平动TF/(rad·m-1) | 628.93 | |
| 链传动 | 链条刚度C/(m·N-1) | 1.49×10-9 |
| 倍行程效应TF | 0.5 | |
| 机械爪 | 摩擦阻尼R/N | 30 |
| 质量I/kg | 44.328 | |
| 直升机 | 阻力Se/N | 2.1×104 |
| 质量I/kg | 6×103 |
表3 电驱动助降装置的传动系统参数
Table 3 Parameters of transmission system for electric landing assist device
| 传动部件 | 参数 | 数值 |
|---|---|---|
| 电机 | 输出转速Sf/(rad·s-1) | |
| 转动转化为平动TF/(rad·m-1) | 20.61 | |
| 同步带传动 | 同步带刚度C/(m·N-1) | 1.92×10-7 |
| 平动转化为转动TF/(m·rad-1) | 48.52×10-3 | |
| 减速机输入端 | 转动惯量I/(kg·m2) | 4.25×10-3 |
| 转动阻尼R/(N·m·s) | 4.7×10-2 | |
| 减速机 | 减速比TF | 40 |
| 丝杆刚度C/(rad·N-1·m-1) | 7.8×10-6 | |
| 减速机输出端 | 转动惯量I/(kg·m2) | 22.95×10-3 |
| 转动阻尼R/(N·m·s) | 5.3×10-3 | |
| 动滑轮 | 质量I/kg | 35.75 |
| 转动转化为平动TF/(rad·m-1) | 628.93 | |
| 链传动 | 链条刚度C/(m·N-1) | 1.49×10-9 |
| 倍行程效应TF | 0.5 | |
| 机械爪 | 摩擦阻尼R/N | 30 |
| 质量I/kg | 44.328 | |
| 直升机 | 阻力Se/N | 2.1×104 |
| 质量I/kg | 6×103 |

图14 电机输出的转速与转矩曲线
Fig.14 Motor output speed and torque curves

图15 机械爪的速度与位移曲线
Fig.15 Velocity and displacement curves of mechanical claw

图16 转运时液压驱动助降装置的部分传动系统原理图
Fig.16 Schematic diagram of a part of transmission system for hydraulic landing assist device

图17 液压驱动助降装置的键合图模型
Fig.17 Bond graph model of hydraulic landing assist device
| 传动部件 | 参数 | 数值 |
|---|---|---|
| 电机 | 输出转速Sf/(rad·s-1) | |
| 齿轮泵 | 转动转化为流量TF/(rad·m-3) | 2.09×106 |
| 内部泄漏R/(m3·s-1·Pa-1) | 3.21×10-12 | |
| 液压管路 | 内部流阻R/(Pa·s·m-3 | 0.91×1011 |
| 单向阀 | 内部流阻R/(Pa·s·m-3) | 3.76×109 |
| 换向阀 | 内部流阻R/(Pa·s·m-3) | 1.03×1010 |
| 内部泄漏R/(m3·s-1·Pa-1) | 3.3×10-13 | |
| 液压油刚度C/(m3·Pa-1) | 2.51×10-14 | |
| 内部泄漏R/(m3·s-1·Pa-1) | 1.04×10-12 | |
| 液压缸 | 流量转化为平动TF/(m2·s-1) | 5.02×10-3 |
| 质量I/kg | 46.32 | |
| 摩擦阻尼R/N | 12.6 | |
| 动滑轮 | 质量I/kg | 35.75 |
| 摩擦阻尼R/N | 25.0 | |
| 链传动 | 链条刚度C/(m·N-1) | 1.49×10-8 |
| 倍行程效应TF | 0.5 | |
| 机械爪 | 摩擦阻尼R/N | 30 |
| 质量I/kg | 44.328 | |
| 直升机 | 负载运动阻力Se/N | 2.1×104 |
| 负载质量I/kg | 6×103 |
表4 液压驱动助降装置的传动系统参数
Table 4 Parameters of transmission system for hydraulic landing assist device
| 传动部件 | 参数 | 数值 |
|---|---|---|
| 电机 | 输出转速Sf/(rad·s-1) | |
| 齿轮泵 | 转动转化为流量TF/(rad·m-3) | 2.09×106 |
| 内部泄漏R/(m3·s-1·Pa-1) | 3.21×10-12 | |
| 液压管路 | 内部流阻R/(Pa·s·m-3 | 0.91×1011 |
| 单向阀 | 内部流阻R/(Pa·s·m-3) | 3.76×109 |
| 换向阀 | 内部流阻R/(Pa·s·m-3) | 1.03×1010 |
| 内部泄漏R/(m3·s-1·Pa-1) | 3.3×10-13 | |
| 液压油刚度C/(m3·Pa-1) | 2.51×10-14 | |
| 内部泄漏R/(m3·s-1·Pa-1) | 1.04×10-12 | |
| 液压缸 | 流量转化为平动TF/(m2·s-1) | 5.02×10-3 |
| 质量I/kg | 46.32 | |
| 摩擦阻尼R/N | 12.6 | |
| 动滑轮 | 质量I/kg | 35.75 |
| 摩擦阻尼R/N | 25.0 | |
| 链传动 | 链条刚度C/(m·N-1) | 1.49×10-8 |
| 倍行程效应TF | 0.5 | |
| 机械爪 | 摩擦阻尼R/N | 30 |
| 质量I/kg | 44.328 | |
| 直升机 | 负载运动阻力Se/N | 2.1×104 |
| 负载质量I/kg | 6×103 |

图18 液压驱动助降装置的电机输出曲线
Fig.18 Motor output curve of hydraulic landing assist device

图19 电驱动助降装置的电机输出曲线
Fig.19 Motor output curve of electric landing assist device

图20 直升机运动速度曲线
Fig.20 Helicopter motion velocity curve

图21 储能元件能耗曲线
Fig.21 Energy consumption curves of energy storage elements
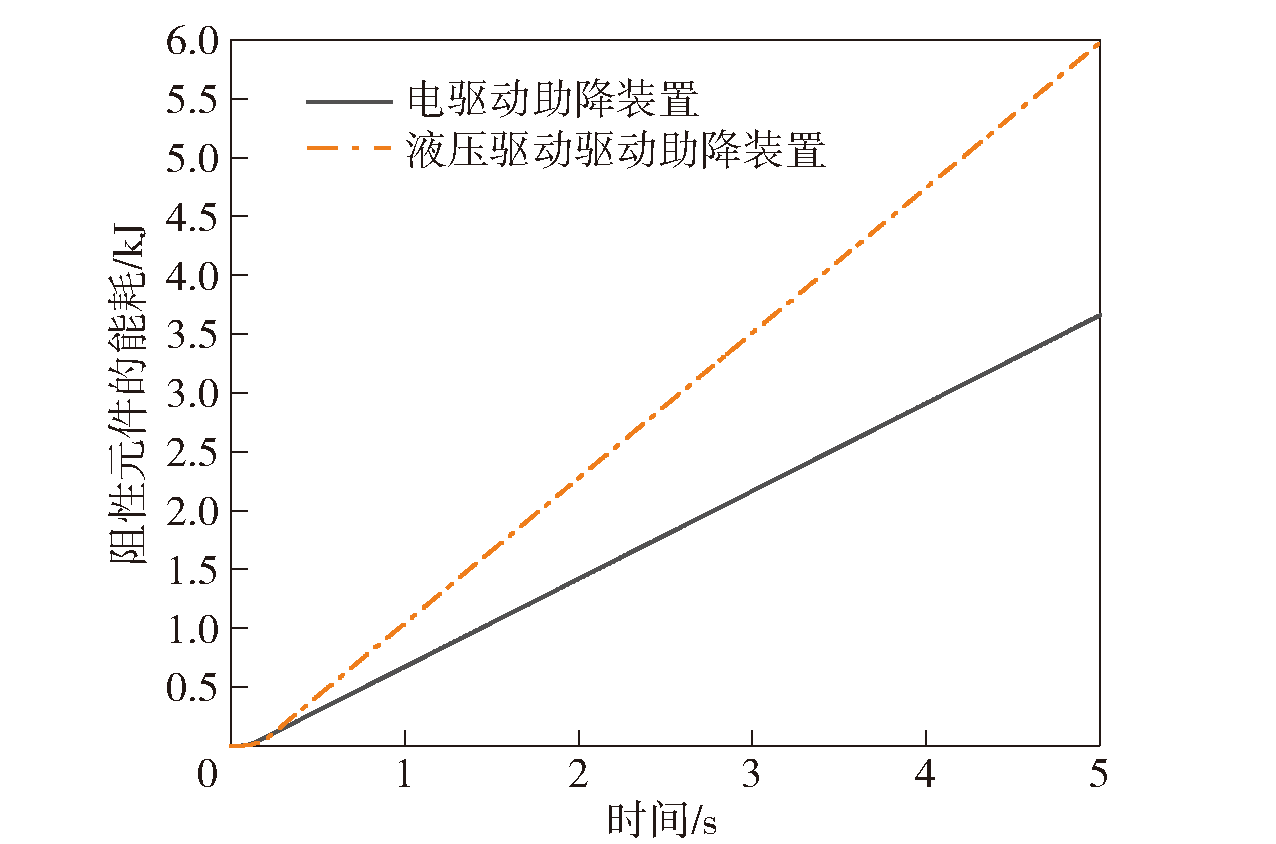
图22 阻性原件能耗曲线
Fig.22 Energy consumpation curves of resistance elements

图23 系统输入的能量曲线
Fig.23 Energy curve of system input

图24 系统输入的功率曲线
Fig.24 Power curve of system input
| [1] |
doi: 10.11648/j.ijmea.20210901.14 URL |
| [2] |
doi: 10.1080/19942060.2020.1786461 URL |
| [3] |
王波, 江鹏远, 张洪亮, 等. 高海况舰上起降风险及应对措施[J]. 船舶工程, 2021, 43(增刊2):9-13.
|
|
|
|
| [4] |
李博, 王孝通, 徐晓刚, 等. 基于计算机视觉的舰载直升机助降技术研究[J]. 兵工学报, 2007, 28(3): 370-373.
|
|
|
|
| [5] |
伍恒, 谭大力, 李启军, 等. 国外舰载直升机助降与牵引装备综合性能对比分析[J]. 舰船科学技术, 2021, 43(23):185-189.
|
|
|
|
| [6] |
doi: 10.3390/app12052603 URL |
| [7] |
doi: 10.3390/s22041514 URL |
| [8] |
doi: 10.1016/j.ast.2019.105675 URL |
| [9] |
doi: 10.1007/s11071-020-05915-w |
| [10] |
doi: 10.1016/j.oceaneng.2020.108428 URL |
| [11] |
doi: 10.1080/19942060.2021.1999330 URL |
| [12] |
doi: 10.1016/j.ast.2020.106175 URL |
| [13] |
李友毅, 张志春, 熊壮, 等. 舰载直升机着舰碰撞建模方法[J]. 系统工程与电子技术, 2015, 37(7): 1691-1696.
|
|
doi: 10.3969/j.issn.1001-506X.2015.07.34 |
|
| [14] |
王倩, 赵丁选, 魏海龙, 等. 复杂海况下舰载机着舰的动力学研究[J]. 东北大学学报(自然科学版), 2017, 38(11):1595-1600.
doi: 10.12068/j.issn.1005-3026.2017.11.016 |
|
|
|
| [15] |
王倩, 赵丁选, 赵颖, 等. 舰载直升机复杂舰面上的动力学分析[J]. 吉林大学学报(工学版), 2017, 47(4): 1109-1113.
|
|
|
|
| [16] |
赵丁选, 王倩, 张祝新. 基于层次分析法的可拓学理论对舰载直升机可靠性的评估[J]. 吉林大学学报(工学版), 2016, 46(5): 1528-1531.
|
|
|
|
| [17] |
doi: 10.1002/rob.v23:02 URL |
| [18] |
doi: 10.2514/1.13865 URL |
| [19] |
张宏军, 蔡斌, 张春燕, 等. 一种海上作业直升机的安全快速回收及放飞系统及方法:中国,CN109398735A[P]. 2019-03-01.
|
|
|
|
| [20] |
梁涛, 张晓刚, 权龙, 等. 泵阀双源协同驱动多执行器系统特性研究[J]. 西安交通大学学报, 2022, 56(3): 1-11.
|
|
|
|
| [21] |
doi: 10.1016/j.energy.2020.119291 URL |
| [22] |
齐昕, 苏涛, 周珂, 等. 交流电机模型预测控制策略发展概述[J]. 中国电机工程学报, 2021, 41(18):6408-6419.
|
|
|
|
| [23] |
贺虎成, 孙磊, 张玉峰, 等. 基于矢量控制的异步电机自抗扰控制[J]. 电机与控制学报, 2019, 23(4): 120-125.
|
|
|
|
| [24] |
吕英俊, 刘卓伟, 苏涛, 等. 异步电机无传感器矢量控制极低速与零速性能研究[J]. 中国电机工程学报, 2019, 39(20): 6095-6103,6190.
|
|
|
|
| [25] |
|
| [26] |
|
| [27] |
doi: 10.1016/j.energy.2020.118767 URL |
| [28] |
doi: 10.3390/mi13010130 URL |
| [29] |
|
| [30] |
doi: 10.1016/j.apenergy.2019.114131 URL |
| [31] |
doi: 10.1109/TITS.6979 URL |
| [32] |
doi: 10.1007/s12206-016-0817-y URL |
| [33] |
doi: 10.1016/j.ijhydene.2021.05.016 URL |
| [34] |
doi: 10.3390/en14020380 URL |
| [1] | 高普, 李宏才, 刘辉, 孟杰克. 装甲车辆综合传动装置外接油管系统动态特性分析[J]. 兵工学报, 2023, 44(11): 3447-3454. |
| [2] | 赵文辉, 孙晓恒, 张伟东, 郑鹏, 杨帆. 四旋翼飞行器齿轮箱-支臂组件动态特性分析[J]. 兵工学报, 2022, 43(5): 1175-1184. |
| [3] | 常丽萍, 常亚南, 杨雷雷. 内圈倾斜角对高速角接触球轴承动态特性的影响[J]. 兵工学报, 2021, 42(6): 1138-1147. |
| [4] | 王书铭, 左哲清, 延皓, 许玲玲, 董立静. 偏导射流伺服阀建模及动态特性研究[J]. 兵工学报, 2018, 39(3): 598-607. |
| [5] | 孟克子, 周荻. 考虑导弹自动驾驶仪动态特性的H∞导引律[J]. 兵工学报, 2016, 37(7): 1194-1202. |
| [6] | 郝晓剑, 桑涛, 潘保武, 周汉昌. 钽-氧化锆光纤黑体腔温度传感器特性参数测试[J]. 兵工学报, 2016, 37(2): 373-378. |
| [7] | 钱立志, 宁全利, 李俊, 蒋滨安. 基于分离式霍普金森压杆的弹载器件动态特性模拟研究[J]. 兵工学报, 2015, 36(10): 1875-1881. |
| [8] | 孙萌, 李长春, 延皓, 刘晓东, 张金英, 母东杰. 多自由度伺服机构负载模拟系统动态特性研究[J]. 兵工学报, 2013, 34(3): 378-384. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4