
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (3): 240217-.doi: 10.12382/bgxb.2024.0217
Previous Articles Next Articles
ZHAO Wei1, WANG Feng2,*( ), MA Xingyu1, ZHAI Weiguang1, MENG Pengshuai1
), MA Xingyu1, ZHAI Weiguang1, MENG Pengshuai1
Received:2024-03-26
Online:2025-03-26
Contact:
WANG Feng
CLC Number:
ZHAO Wei, WANG Feng, MA Xingyu, ZHAI Weiguang, MENG Pengshuai. Visual SLAM Algorithm Based on Dynamic Region Exclusion and Dense Map Construction[J]. Acta Armamentarii, 2025, 46(3): 240217-.
Add to citation manager EndNote|Ris|BibTeX
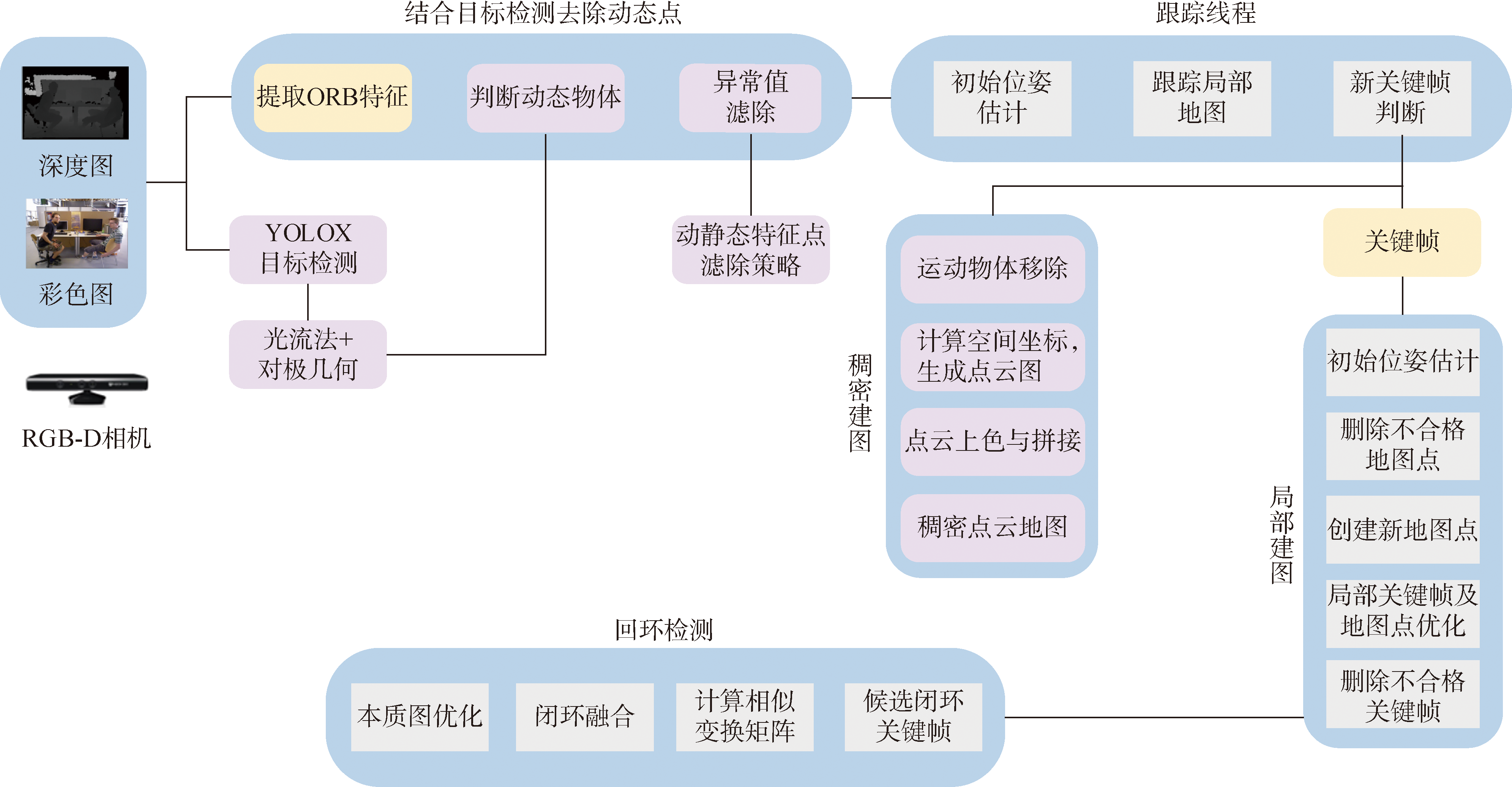
Fig.1 System framework

Fig.2 YOLOX detection effect
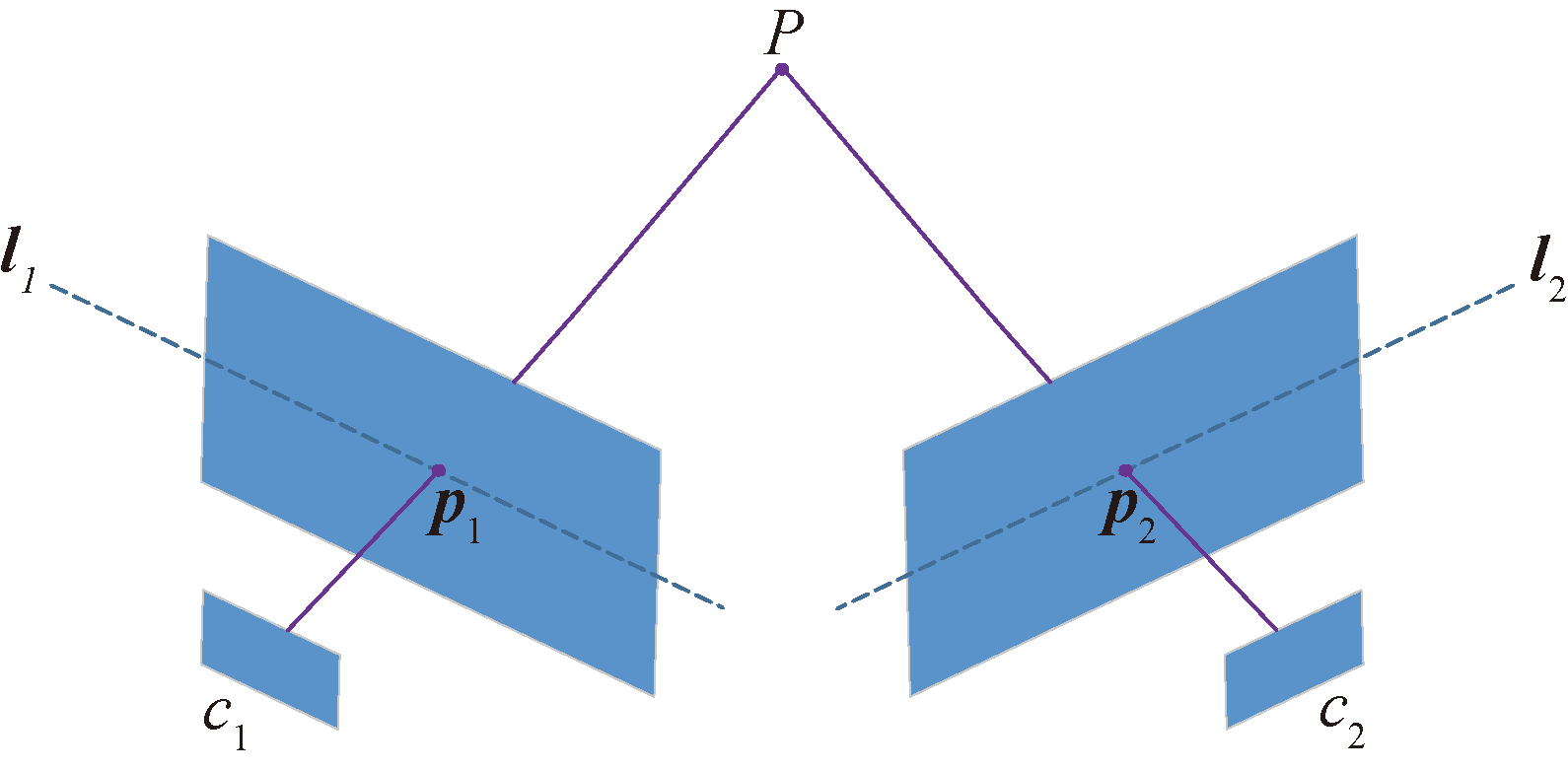
Fig.3 Schematic diagram of polar geometry
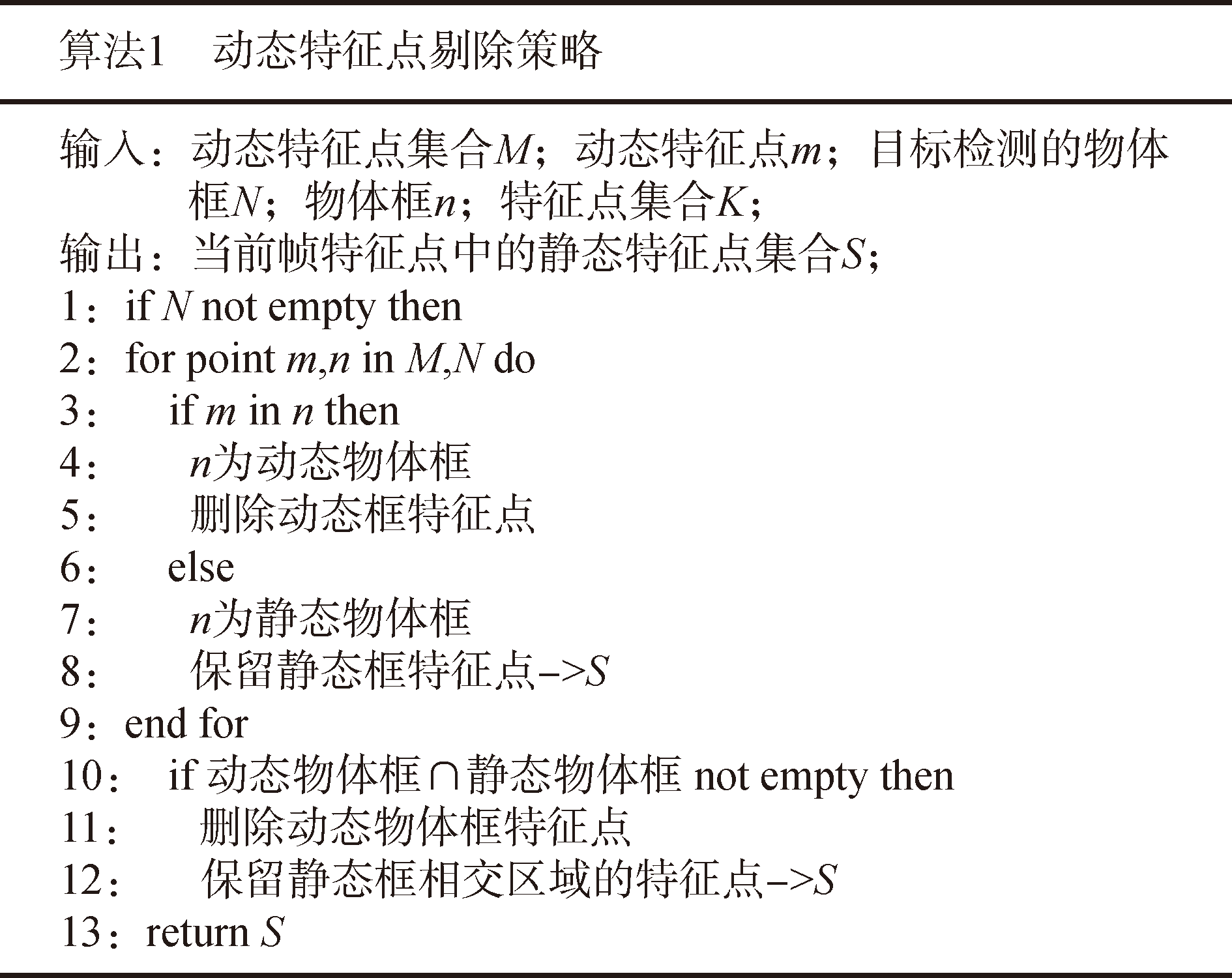
Fig.4 Dynamic feature point culling strategy

Fig.5 Dynamic feature point culling
Fig.6 The effect of RGB images in the real scene
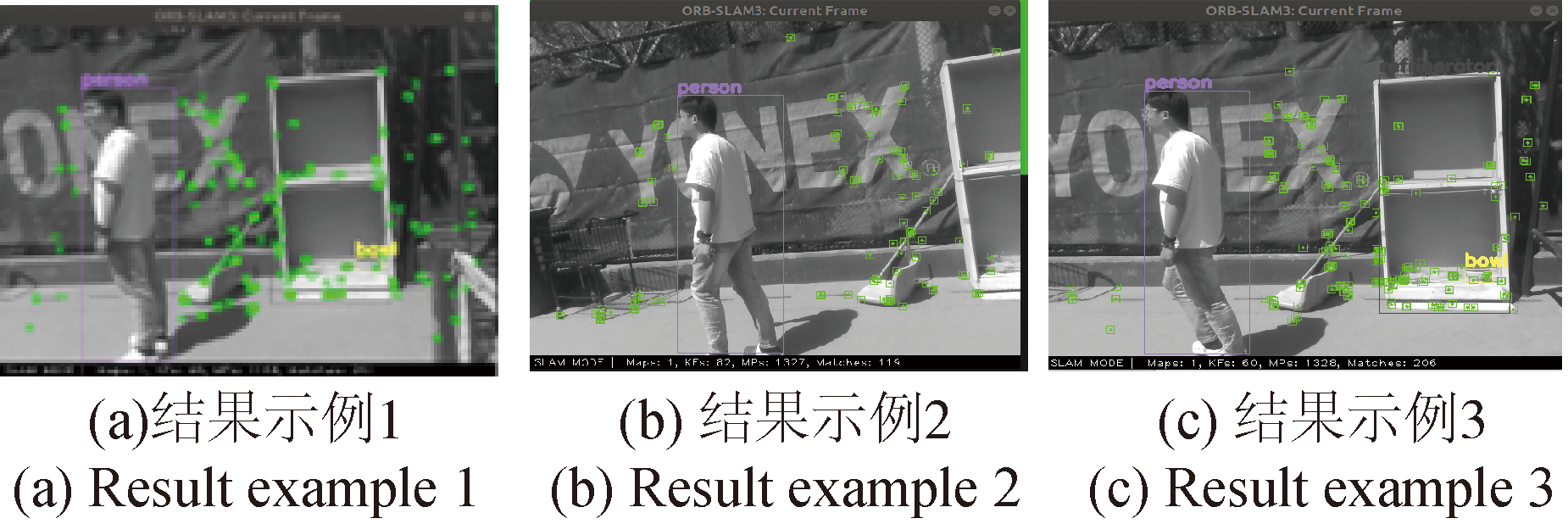
Fig.7 The effect of removing the dynamic feature points in the real scene

Fig.8 Schematic diagram of the estimated trajectory error of ORB-SLAM3 algorithm

Fig.9 Schematic diagram of the estimated trajectory error of the proposed algorithm
| 结果 | ORB-SLAM3 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_walking_xyz | 0.2767 | 0.2495 | 0.2360 | 0.1197 | 0.0149 | 0.0128 | 0.0110 | 0.0076 |
| fr3_walking_static | 0.4242 | 0.3711 | 0.3491 | 0.2055 | 0.0098 | 0.0088 | 0.0073 | 0.0051 |
| fr3_walking_rpy | 0.7765 | 0.6571 | 0.6436 | 0.4137 | 0.0425 | 0.0327 | 0.0263 | 0.0271 |
| fr3_walking_half | 0.3619 | 0.3443 | 0.3515 | 0.1114 | 0.0234 | 0.0194 | 0.0164 | 0.0131 |
| fr3_sitting_static | 0.0107 | 0.0093 | 0.0081 | 0.0052 | 0.0058 | 0.0049 | 0.0042 | 0.0030 |
| fr3_sitting_xyz | 0.0099 | 0.0088 | 0.0081 | 0.0045 | 0.0134 | 0.0117 | 0.0106 | 0.0066 |
| fr3_sitting_rpy | 0.0242 | 0.0174 | 0.0124 | 0.0169 | 0.0354 | 0.0278 | 0.0223 | 0.0219 |
Table 1 Comparison of absolute trajectory errors of ORB-SLAM3 and the proposed algorithm
| 结果 | ORB-SLAM3 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_walking_xyz | 0.2767 | 0.2495 | 0.2360 | 0.1197 | 0.0149 | 0.0128 | 0.0110 | 0.0076 |
| fr3_walking_static | 0.4242 | 0.3711 | 0.3491 | 0.2055 | 0.0098 | 0.0088 | 0.0073 | 0.0051 |
| fr3_walking_rpy | 0.7765 | 0.6571 | 0.6436 | 0.4137 | 0.0425 | 0.0327 | 0.0263 | 0.0271 |
| fr3_walking_half | 0.3619 | 0.3443 | 0.3515 | 0.1114 | 0.0234 | 0.0194 | 0.0164 | 0.0131 |
| fr3_sitting_static | 0.0107 | 0.0093 | 0.0081 | 0.0052 | 0.0058 | 0.0049 | 0.0042 | 0.0030 |
| fr3_sitting_xyz | 0.0099 | 0.0088 | 0.0081 | 0.0045 | 0.0134 | 0.0117 | 0.0106 | 0.0066 |
| fr3_sitting_rpy | 0.0242 | 0.0174 | 0.0124 | 0.0169 | 0.0354 | 0.0278 | 0.0223 | 0.0219 |
| 结果 | ORB-SLAM3 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_walking_xyz | 0.0307 | 0.0253 | 0.0207 | 0.0174 | 0.0089 | 0.0079 | 0.0077 | 0.0041 |
| fr3_walking_static | 0.0177 | 0.0126 | 0.0095 | 0.0124 | 0.0080 | 0.0063 | 0.0052 | 0.004 |
| fr3_walking_rpy | 0.0340 | 0.0272 | 0.0215 | 0.0203 | 0.0292 | 0.0166 | 0.0121 | 0.0240 |
| fr3_walking_half | 0.0263 | 0.0201 | 0.0155 | 0.0170 | 0.0173 | 0.0130 | 0.0100 | 0.0115 |
| fr3_sitting_static | 0.0056 | 0.0048 | 0.0040 | 0.0029 | 0.0051 | 0.0044 | 0.0039 | 0.0026 |
| fr3_sitting_xyz | 0.0115 | 0.0102 | 0.0092 | 0.0052 | 0.0106 | 0.0089 | 0.0077 | 0.0057 |
| fr3_sitting_rpy | 0.0231 | 0.0146 | 0.0111 | 0.0179 | 0.0170 | 0.0117 | 0.0079 | 0.0123 |
Table 2 Comparison of relative trajectory errors of ORB-SLAM3 and the proposed algorithm
| 结果 | ORB-SLAM3 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_walking_xyz | 0.0307 | 0.0253 | 0.0207 | 0.0174 | 0.0089 | 0.0079 | 0.0077 | 0.0041 |
| fr3_walking_static | 0.0177 | 0.0126 | 0.0095 | 0.0124 | 0.0080 | 0.0063 | 0.0052 | 0.004 |
| fr3_walking_rpy | 0.0340 | 0.0272 | 0.0215 | 0.0203 | 0.0292 | 0.0166 | 0.0121 | 0.0240 |
| fr3_walking_half | 0.0263 | 0.0201 | 0.0155 | 0.0170 | 0.0173 | 0.0130 | 0.0100 | 0.0115 |
| fr3_sitting_static | 0.0056 | 0.0048 | 0.0040 | 0.0029 | 0.0051 | 0.0044 | 0.0039 | 0.0026 |
| fr3_sitting_xyz | 0.0115 | 0.0102 | 0.0092 | 0.0052 | 0.0106 | 0.0089 | 0.0077 | 0.0057 |
| fr3_sitting_rpy | 0.0231 | 0.0146 | 0.0111 | 0.0179 | 0.0170 | 0.0117 | 0.0079 | 0.0123 |
| 结果 | ATE | RPE | ||||||
|---|---|---|---|---|---|---|---|---|
| Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | |
| fr3_walking_xyz | 0.0553 | 0.021 | 0.016 | 0.0148 | 0.0653 | 0.026 | 0.0221 | 0.0079 |
| fr3_walking_static | 0.0049 | 0.081 | 0.0060 | 0.0098 | 0.0100 | 0.022 | 0.0116 | 0.0080 |
| fr3_walking_rpy | 0.0386 | 0.146 | 0.0412 | 0.0424 | 0.0680 | 0.024 | 0.0132 | 0.0291 |
| fr3_walking_half | 0.0626 | 0.025 | 0.0323 | 0.0234 | 0.0167 | 0.027 | 0.0235 | 0.0173 |
| fr3_sitting_static | 0.0045 | 0.0055 | 0.0057 | 0.0223 | 0.0064 | 0.0050 | ||
| fr3_sitting_xyz | 0.0134 | 0.0106 | ||||||
Table 3 Comparison of RMSE values for different algorithms
| 结果 | ATE | RPE | ||||||
|---|---|---|---|---|---|---|---|---|
| Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | |
| fr3_walking_xyz | 0.0553 | 0.021 | 0.016 | 0.0148 | 0.0653 | 0.026 | 0.0221 | 0.0079 |
| fr3_walking_static | 0.0049 | 0.081 | 0.0060 | 0.0098 | 0.0100 | 0.022 | 0.0116 | 0.0080 |
| fr3_walking_rpy | 0.0386 | 0.146 | 0.0412 | 0.0424 | 0.0680 | 0.024 | 0.0132 | 0.0291 |
| fr3_walking_half | 0.0626 | 0.025 | 0.0323 | 0.0234 | 0.0167 | 0.027 | 0.0235 | 0.0173 |
| fr3_sitting_static | 0.0045 | 0.0055 | 0.0057 | 0.0223 | 0.0064 | 0.0050 | ||
| fr3_sitting_xyz | 0.0134 | 0.0106 | ||||||
| 结果 | ATE | RPE | ||||||
|---|---|---|---|---|---|---|---|---|
| Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | |
| fr3_walking_xyz | 0.0376 | 0.012 | 0.0087 | 0.0076 | 0.0398 | 0.016 | 0.007 | 0.0040 |
| fr3_walking_static | 0.0027 | 0.022 | 0.0033 | 0.0050 | 0.0067 | 0.014 | 0.0046 | 0.0049 |
| fr3_walking_rpy | 0.0235 | 0.105 | 0.0301 | 0.0271 | 0.0398 | 0.012 | 0.0053 | 0.0240 |
| r3_walking_half | 0.0347 | 0.017 | 0.0158 | 0.0131 | 0.1042 | 0.014 | 0.0097 | 0.0114 |
| fr3_sitting_static | 0.0030 | 0.0024 | 0.0029 | 0.0132 | 0.0035 | 0.0026 | ||
| fr3_sitting_xyz | 0.0219 | 0.0057 | ||||||
Table 4 Comparison of S.D.values for different algorithms
| 结果 | ATE | RPE | ||||||
|---|---|---|---|---|---|---|---|---|
| Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | |
| fr3_walking_xyz | 0.0376 | 0.012 | 0.0087 | 0.0076 | 0.0398 | 0.016 | 0.007 | 0.0040 |
| fr3_walking_static | 0.0027 | 0.022 | 0.0033 | 0.0050 | 0.0067 | 0.014 | 0.0046 | 0.0049 |
| fr3_walking_rpy | 0.0235 | 0.105 | 0.0301 | 0.0271 | 0.0398 | 0.012 | 0.0053 | 0.0240 |
| r3_walking_half | 0.0347 | 0.017 | 0.0158 | 0.0131 | 0.1042 | 0.014 | 0.0097 | 0.0114 |
| fr3_sitting_static | 0.0030 | 0.0024 | 0.0029 | 0.0132 | 0.0035 | 0.0026 | ||
| fr3_sitting_xyz | 0.0219 | 0.0057 | ||||||

Fig.10 Sparse point cloud map

Fig.11 Construction of dense map
| [1] |
张一凡, 缪远东, 陈畅宇, 等. 户外增强现实军事仿真系统[J]. 光学技术, 2019, 45(5):622-628.
|
|
|
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
张福斌, 张炳烁, 杨玉帅. 基于单目/IMU/里程计融合的 SLAM 算法[J]. 兵工学报, 2022, 43(11):2810-2818.
|
|
doi: 10.12382/bgxb.2022.0240 |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
罗元, 沈吉祥, 李方宇. 动态环境下基于深度学习的视觉SLAM研究综述[J]. 半导体光电, 2024, 45(1):1-10.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
岳胜哲, 王正杰. 基于实例分割与光流的动态环境SLAM[J]. 兵工学报, 2024, 45(1):156-165.
doi: 10.12382/bgxb.2023.0568 |
|
doi: 10.12382/bgxb.2023.0568 |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [1] | ZHAO Chunbo, MO Bo, LI Dawei, ZHAO Jie. Research on Motion Blur Object Detection Technology for Imaging Guidance [J]. Acta Armamentarii, 2025, 46(2): 240376-. |
| [2] | WANG Yeru, YANG Geng, LIU Shu, XU Xiao, CHEN Huajie, QIN Feiwei, XU Huajie. GCN-based Detection of Occluded Key Parts of Vehicle Target [J]. Acta Armamentarii, 2024, 45(S1): 242-251. |
| [3] | SUN Hao, LI Haiqing, LIANG Yan, MA Chaoxiong, WU Han. Dynamic Penetration Decision of Loitering Munition Group Based on Knowledge-assisted Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(9): 3161-3176. |
| [4] | XIONG Guangming, LUO Zhen, SUN Dong, TAO Junfeng, TANG Zeyue, WU Chao. Object Detection and Tracking for Unmanned Vehicles Based on Fusion of Infrared Camera and MMW Radar in Smoke-obscured Environment [J]. Acta Armamentarii, 2024, 45(3): 893-906. |
| [5] | YUE Shengzhe, WANG Zhengjie. A SLAM in Dynamic Environment Based on Instance Segmentation and Optical Flow [J]. Acta Armamentarii, 2024, 45(1): 156-165. |
| [6] | QIN Haolin, XU Tingfa, LI Jianan. Semi-supervised Hyperspectral Salient Object Detection Using Superpixel Attention and Siamese Structure [J]. Acta Armamentarii, 2023, 44(9): 2639-2649. |
| [7] | GUO Yonghong, NIU Haitao, SHI Chao, GUO Cheng. Few-shot Object Detection Based on Convolution Network and Attention Mechanism [J]. Acta Armamentarii, 2023, 44(11): 3508-3515. |
| [8] | WU Qing-qing, XU Ting-fa, YAN Hui, XU Lei, WU Wei, LI Xiang-min. An Improved Color Separation Method for Object Detection in Complex Background [J]. Acta Armamentarii, 2013, 34(4): 501-506. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||