
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (3): 240362-.doi: 10.12382/bgxb.2024.0362
Previous Articles Next Articles
LI Yaxuan, LIU Xinfu*( )
)
Received:2024-05-10
Online:2025-03-26
Contact:
LIU Xinfu
CLC Number:
LI Yaxuan, LIU Xinfu. Real-time Trajectory Planning for Fixed-wing UAVs Based on Exact Convex Relaxation[J]. Acta Armamentarii, 2025, 46(3): 240362-.
Add to citation manager EndNote|Ris|BibTeX
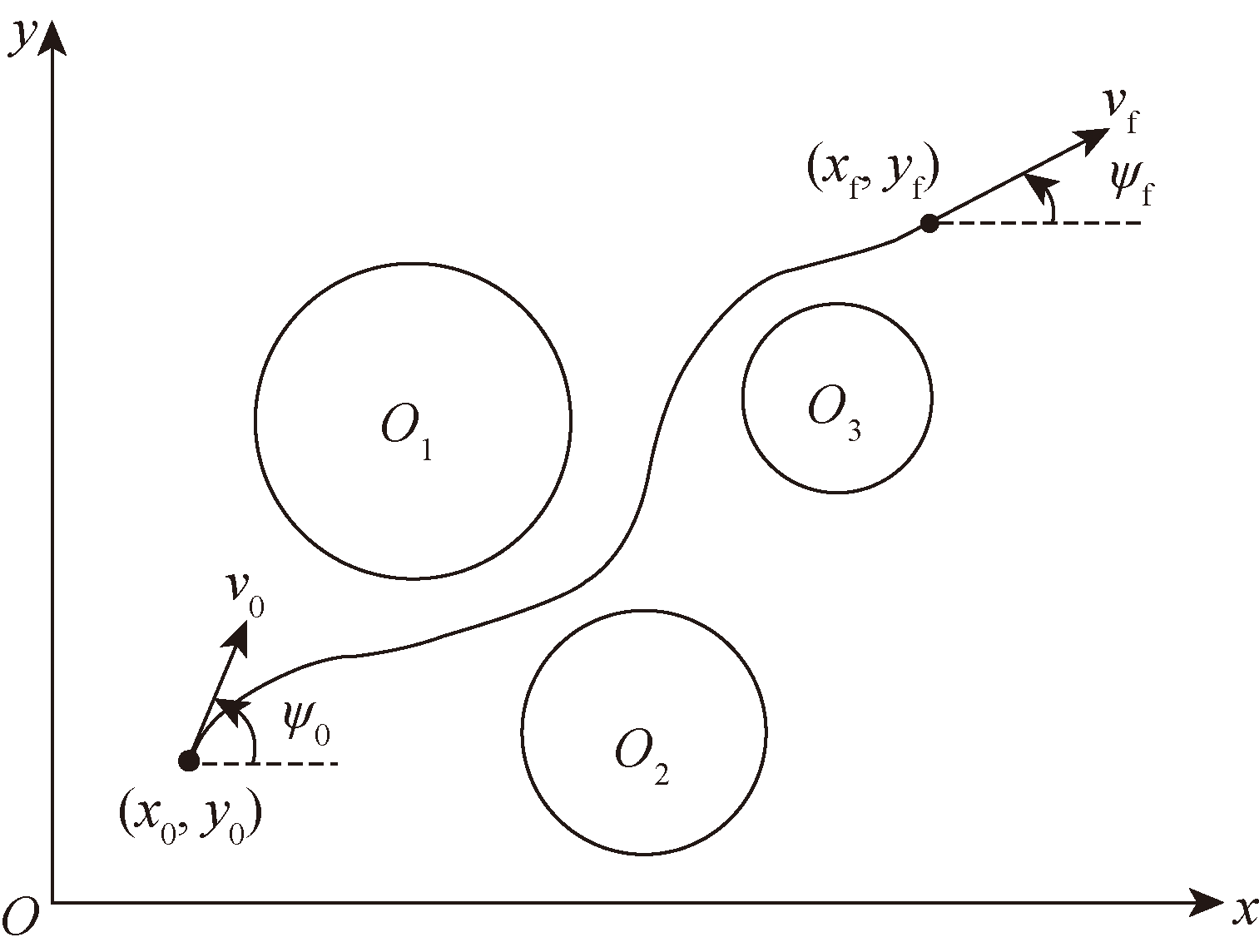
Fig.1 Schematic diagram of a UAV flying in a multi-obstacle environment
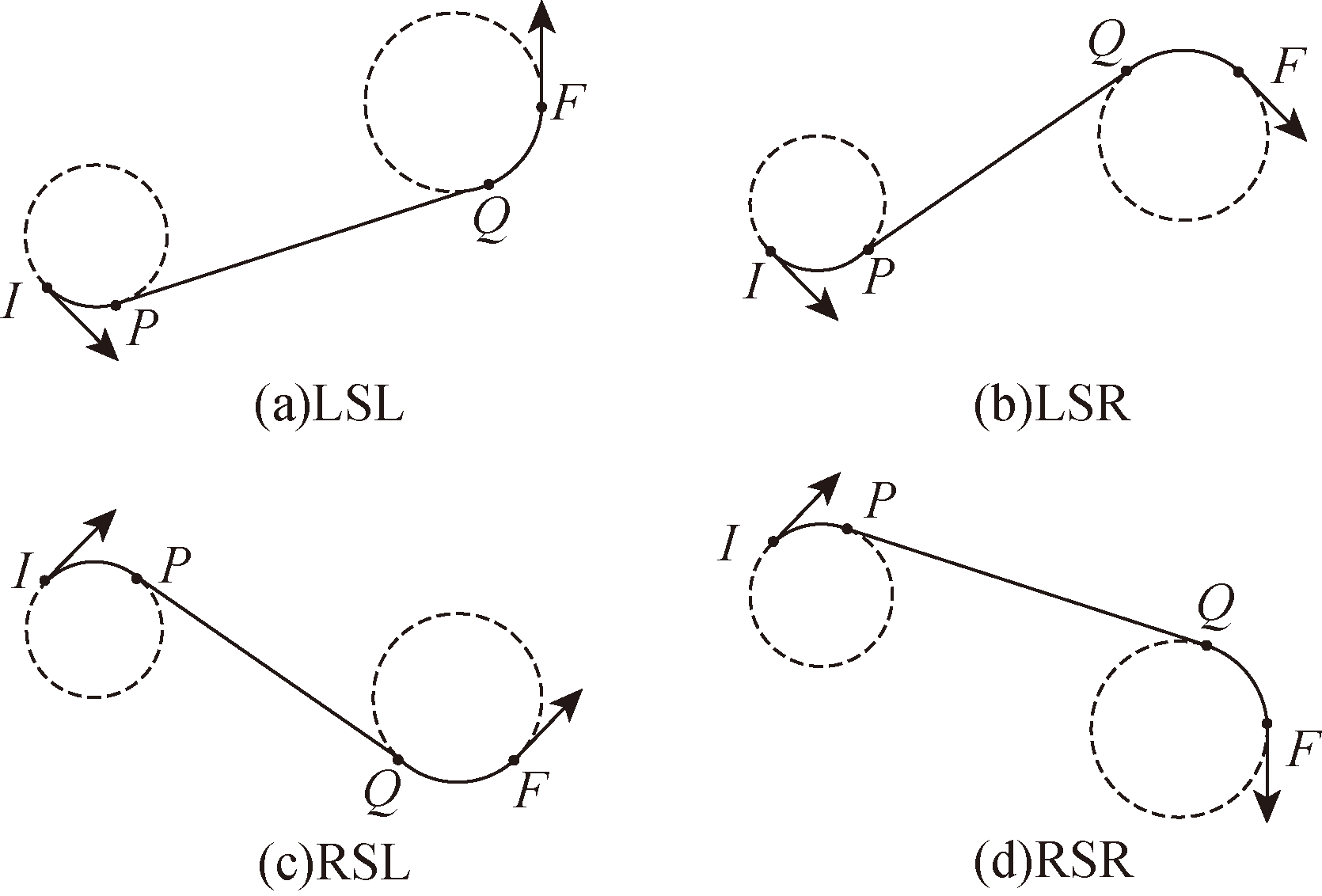
Fig.2 Dubins path
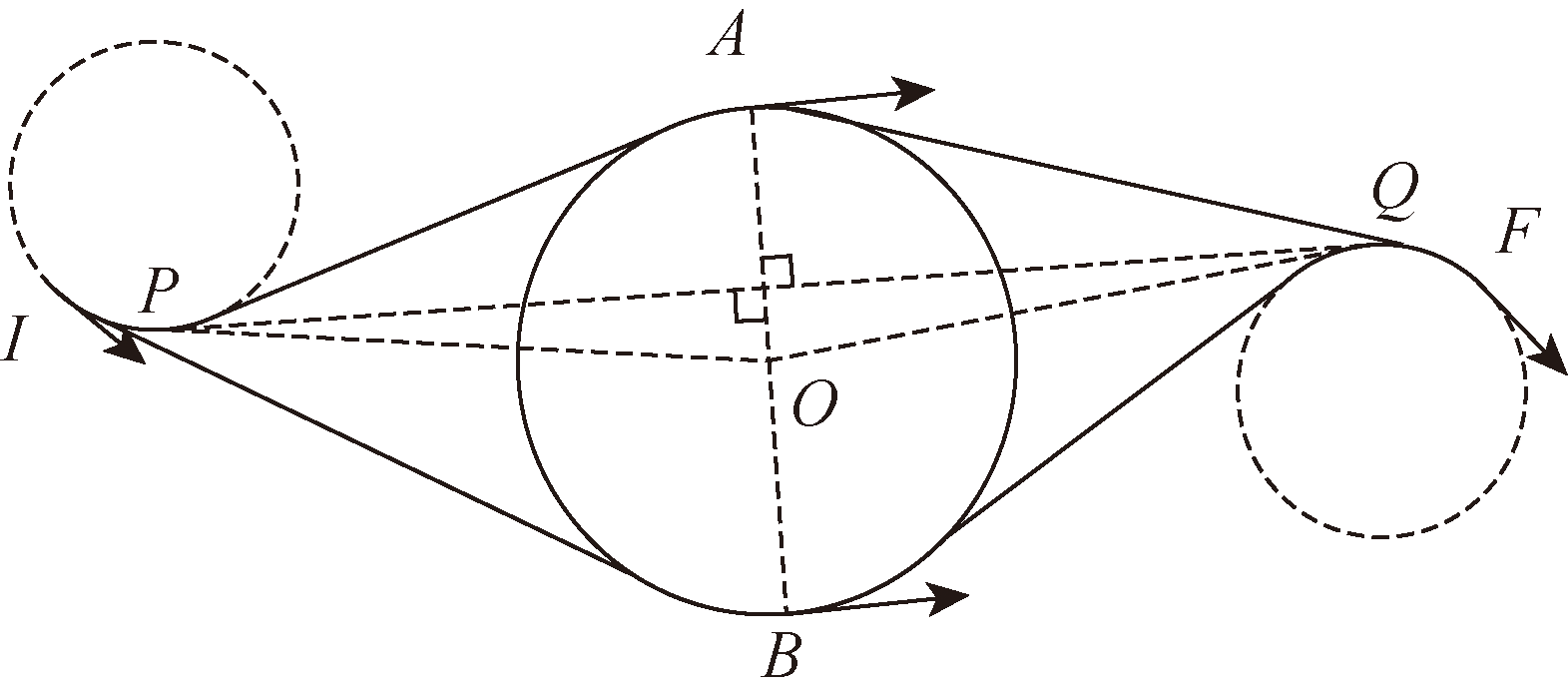
Fig.3 Schematic diagram of single obstacle avoidance
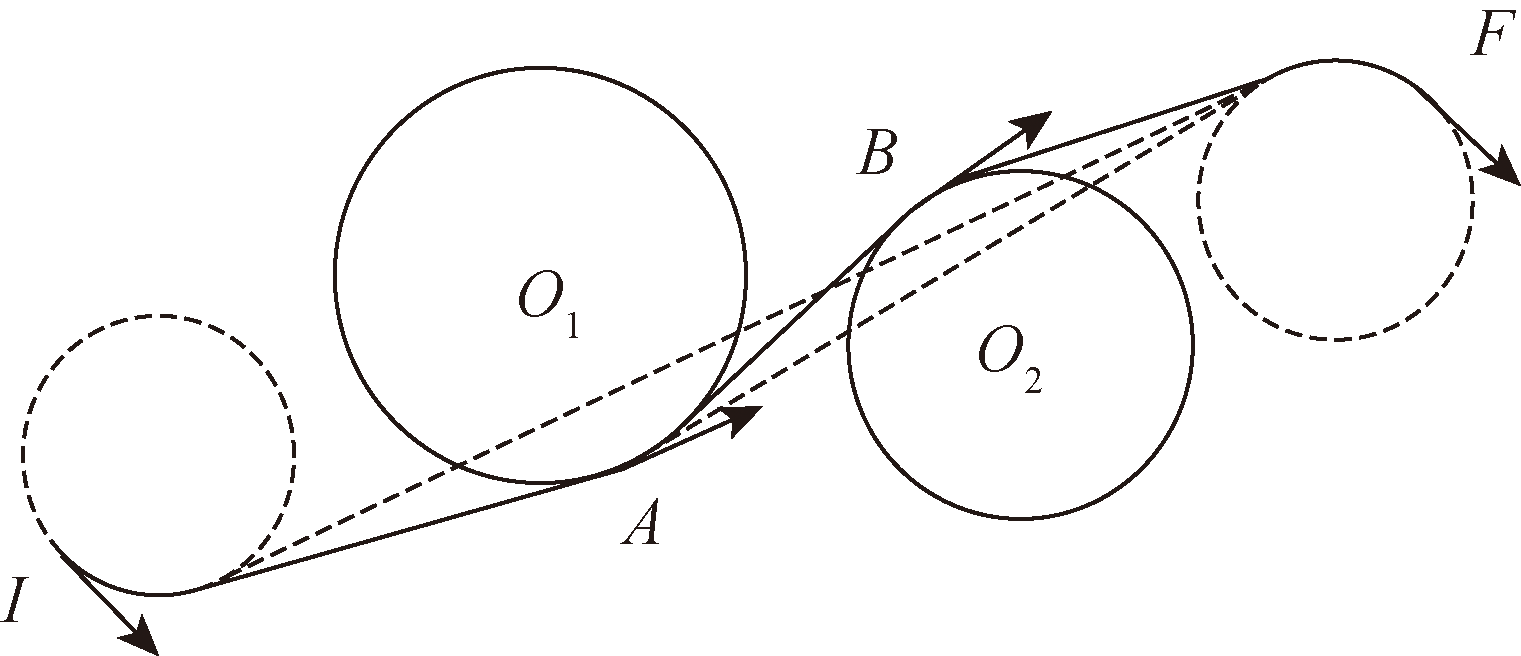
Fig.4 Schematic diagram of multi-obstacles avoidance
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m/kg | 11.5 | vmax/(m·s-1) | 40 |
| S/m2 | 0.84 | vmin/(m·s-1) | 25 |
| c0 | 0.0339 | Tmax/N | 100 |
| c1 | 0.1834 | Tmin/N | 10 |
| CL,max | 0.6083 | σmax/(°) | 60 |
Table 1 Parameters of fixed-wing UAV
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m/kg | 11.5 | vmax/(m·s-1) | 40 |
| S/m2 | 0.84 | vmin/(m·s-1) | 25 |
| c0 | 0.0339 | Tmax/N | 100 |
| c1 | 0.1834 | Tmin/N | 10 |
| CL,max | 0.6083 | σmax/(°) | 60 |
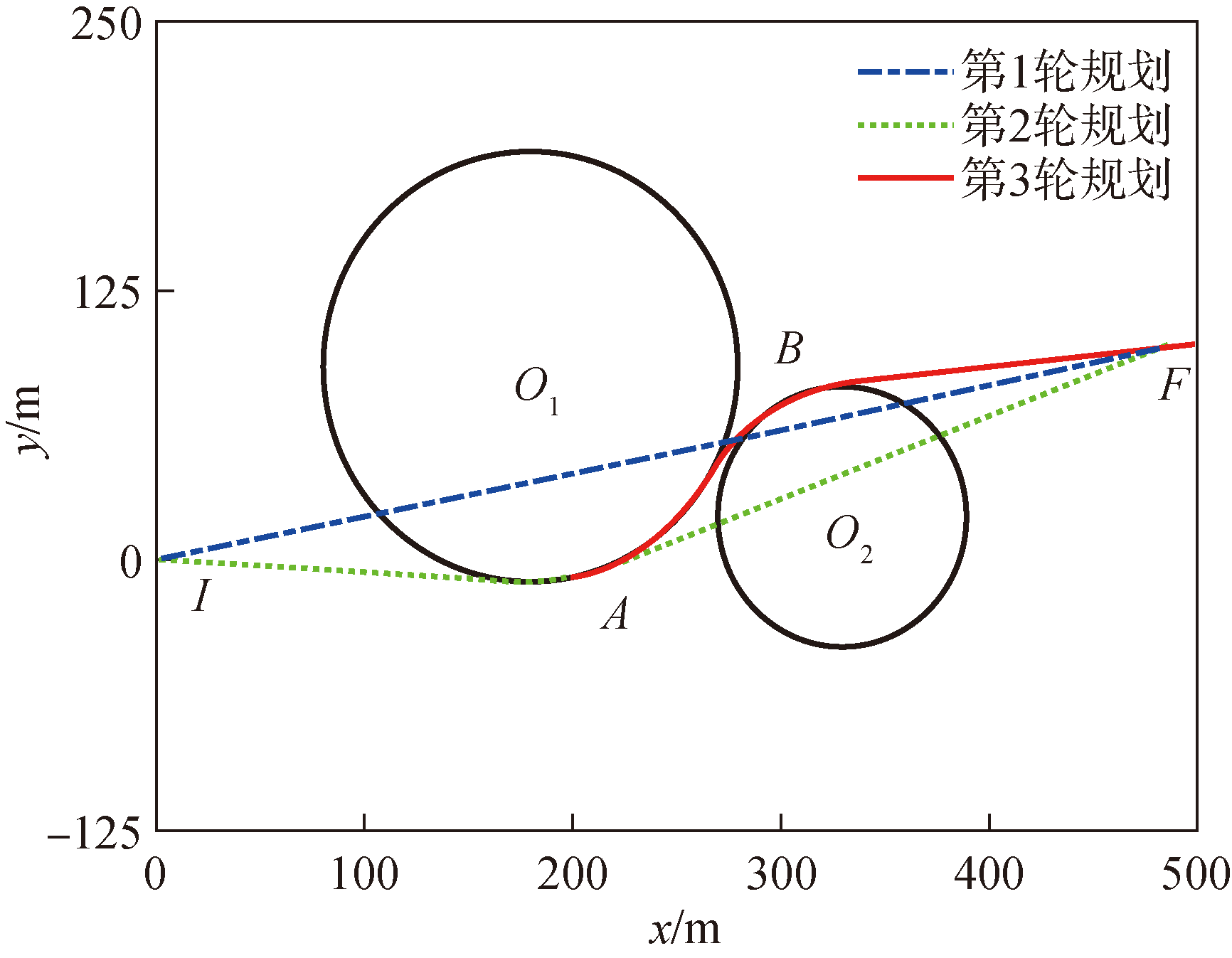
Fig.5 Schematic diagram of obstacle avoidance path planning
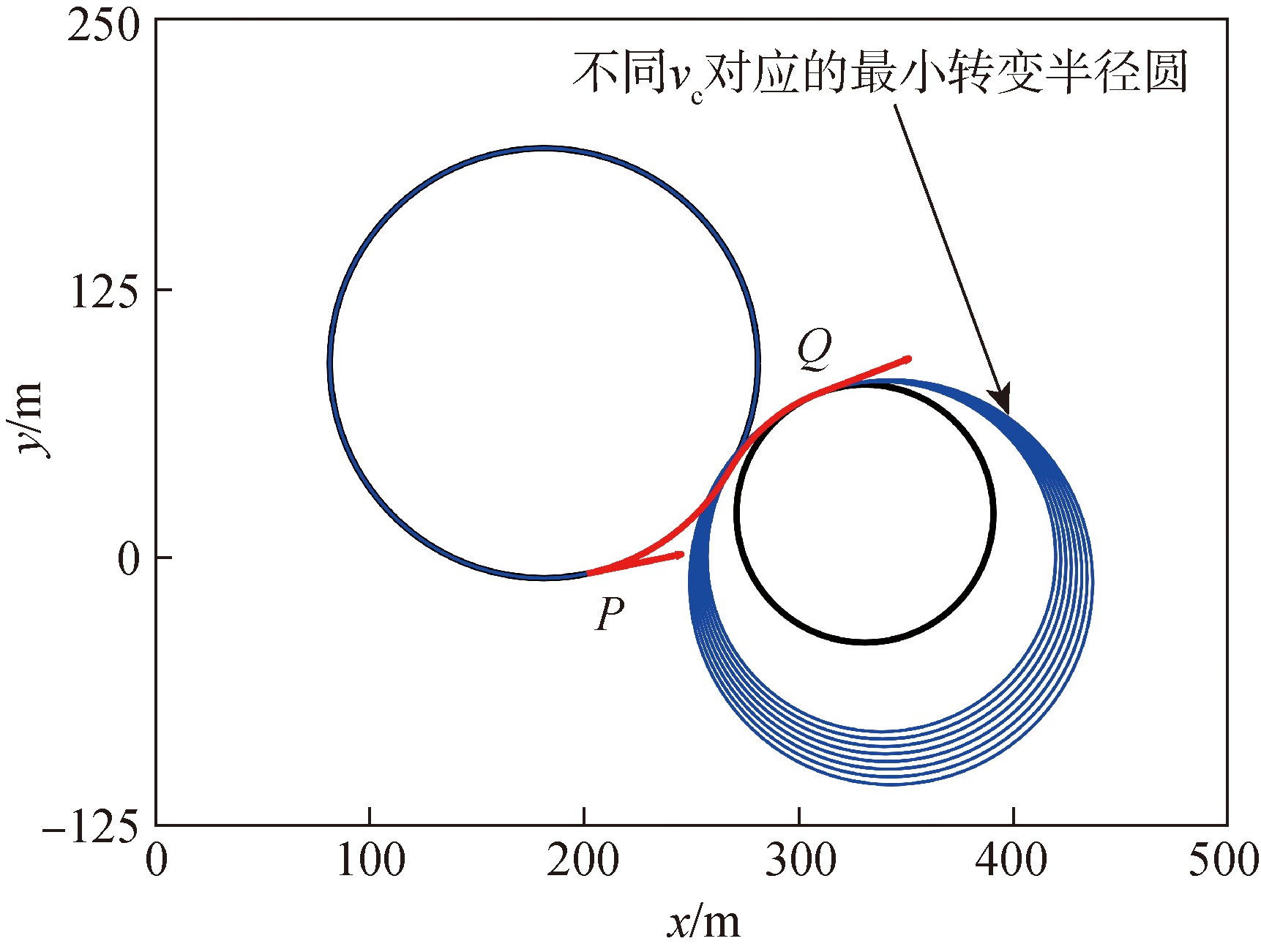
Fig.6 Search process
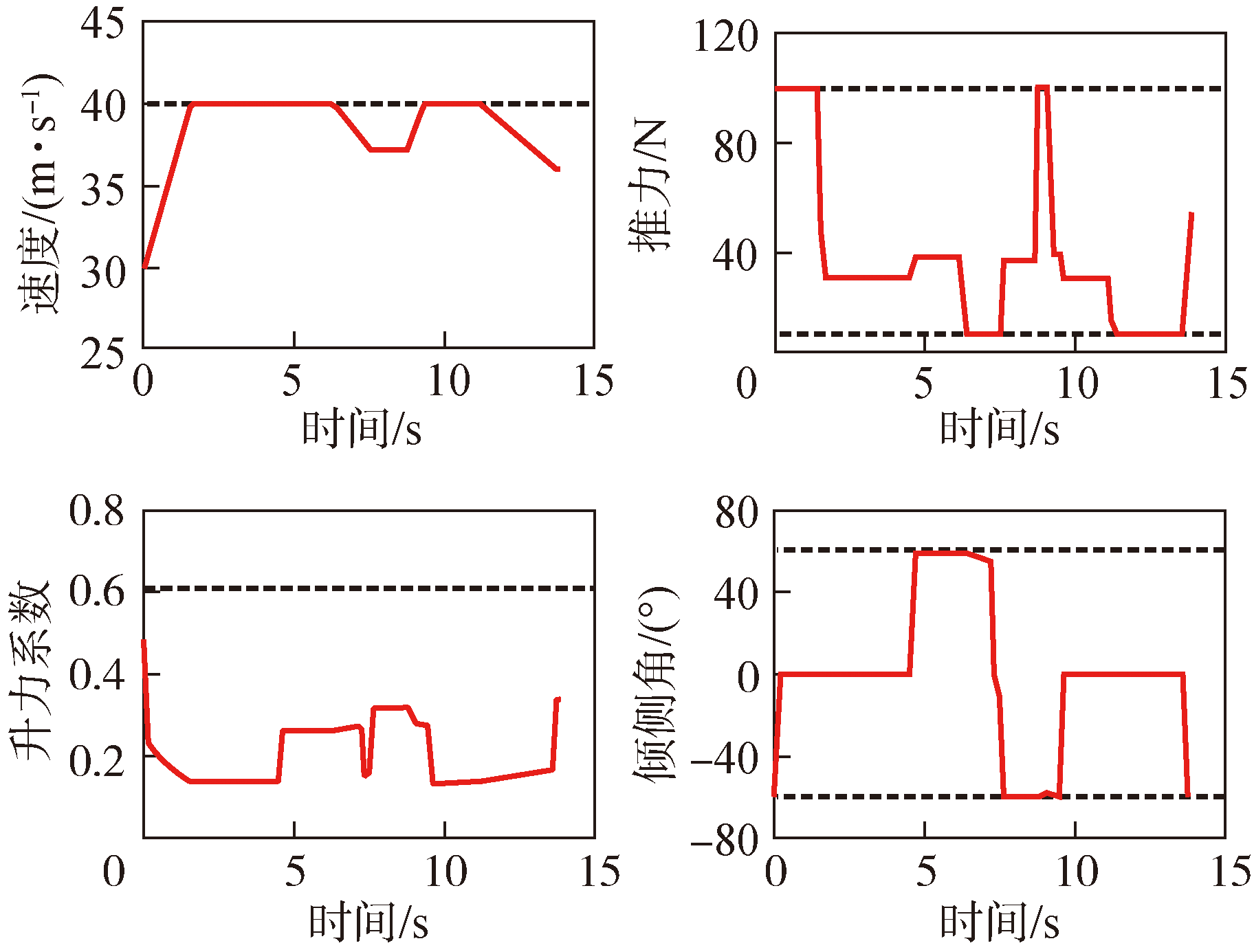
Fig.7 Velocity and control curves

Fig.8 Effects of different objective functions on the activity of the relaxed constraint
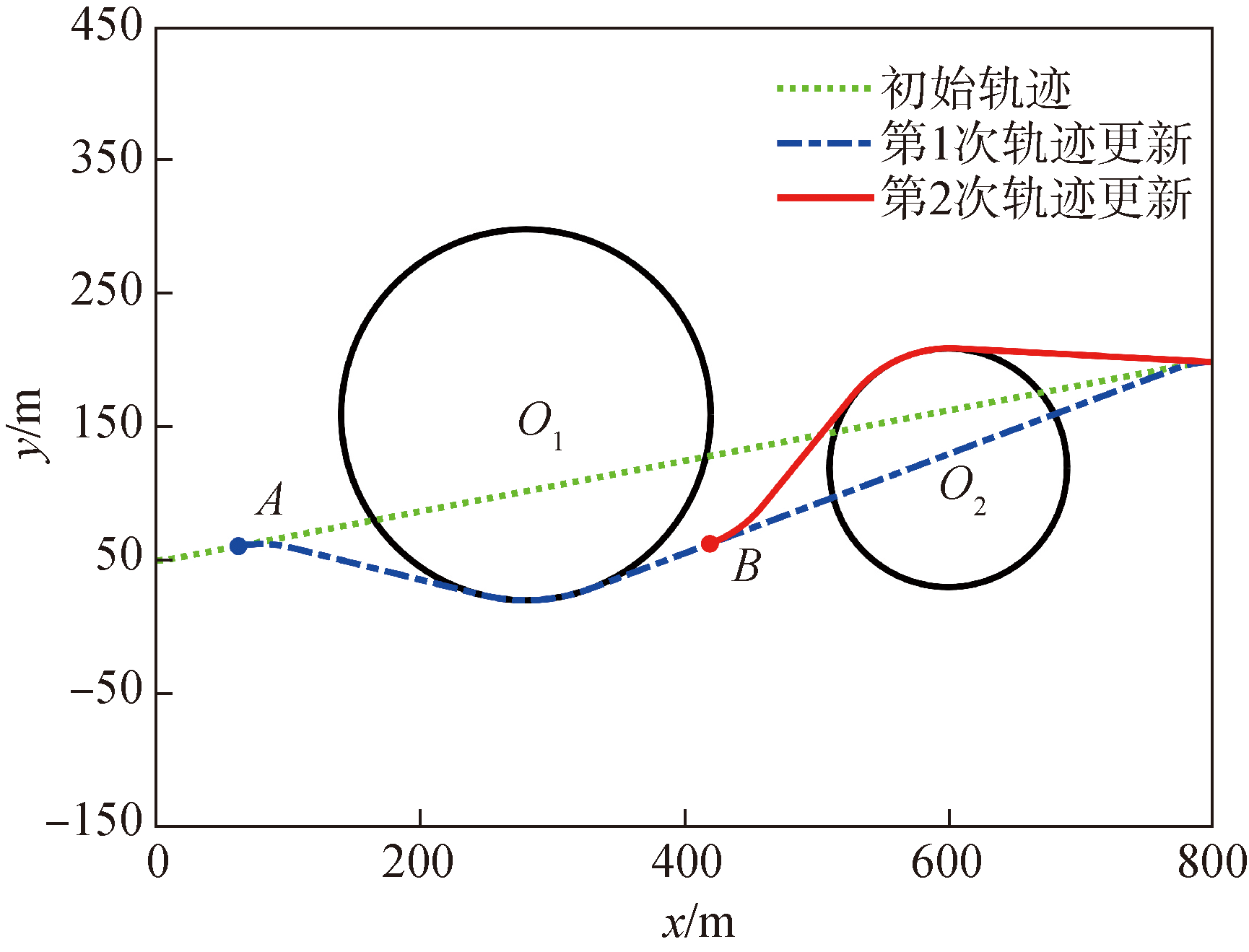
Fig.9 Flight path in the unknown obstacle environment
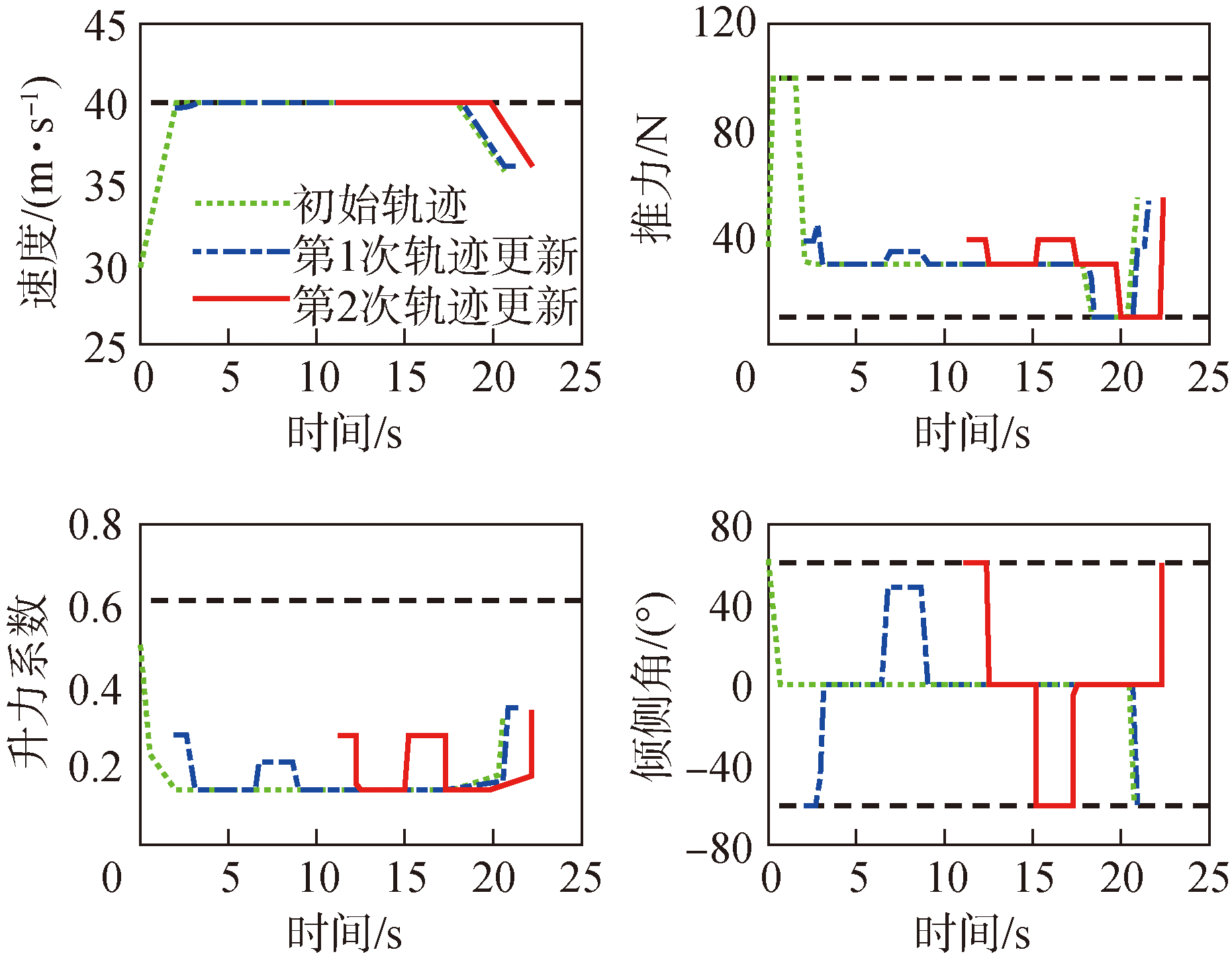
Fig.10 Velocity and control curves in the unknown obstacle environment
| 障碍序号 | xO/m | yO/ m | rO/m |
|---|---|---|---|
| 1 | 280 | 90 | 105 |
| 2 | 640 | 160 | 140 |
| 3 | 500 | -180 | 120 |
| 4 | 200 | -140 | 70 |
Table 2 Parameters of obstacles
| 障碍序号 | xO/m | yO/ m | rO/m |
|---|---|---|---|
| 1 | 280 | 90 | 105 |
| 2 | 640 | 160 | 140 |
| 3 | 500 | -180 | 120 |
| 4 | 200 | -140 | 70 |
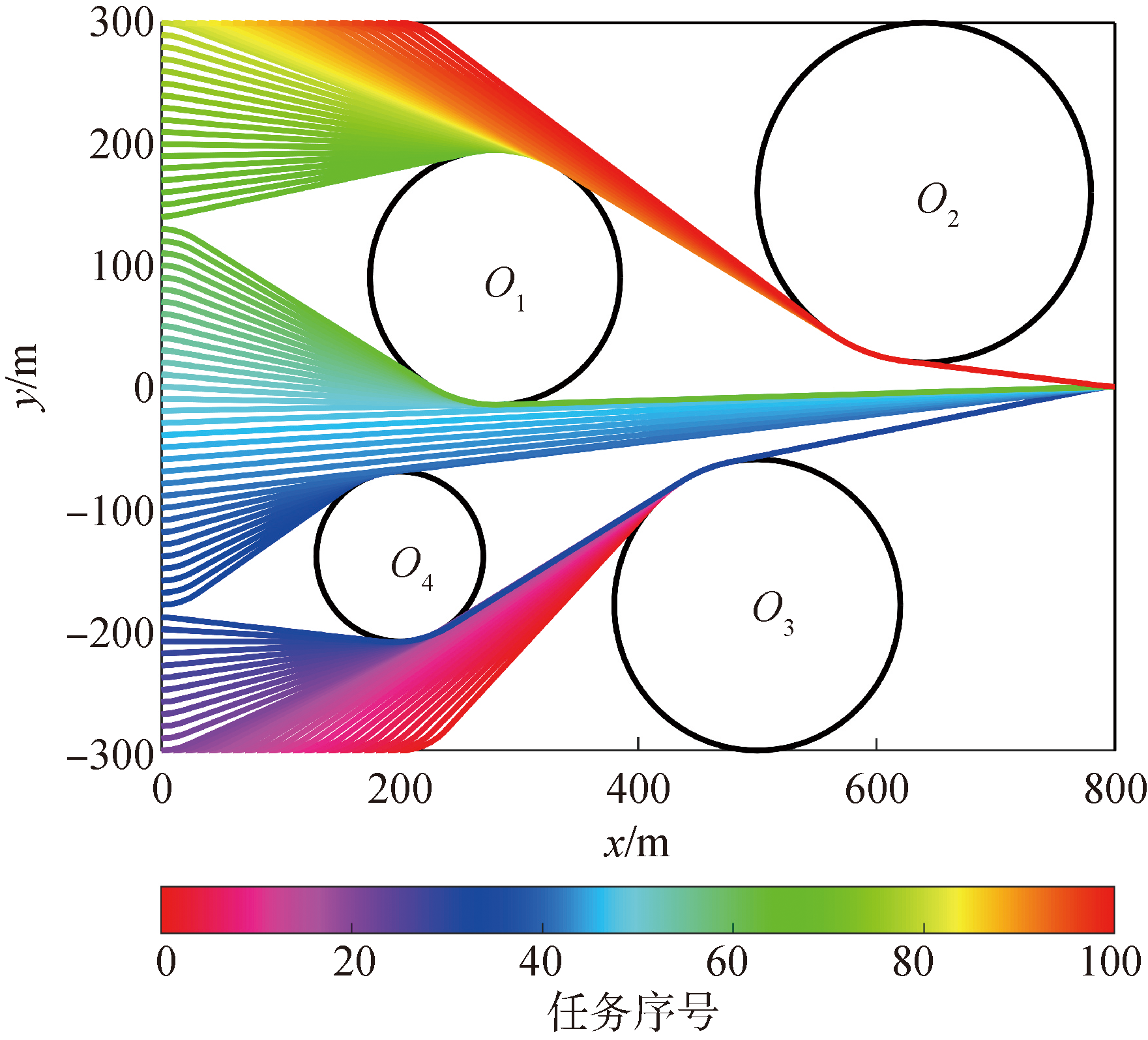
Fig.11 Flight paths got by the proposed method
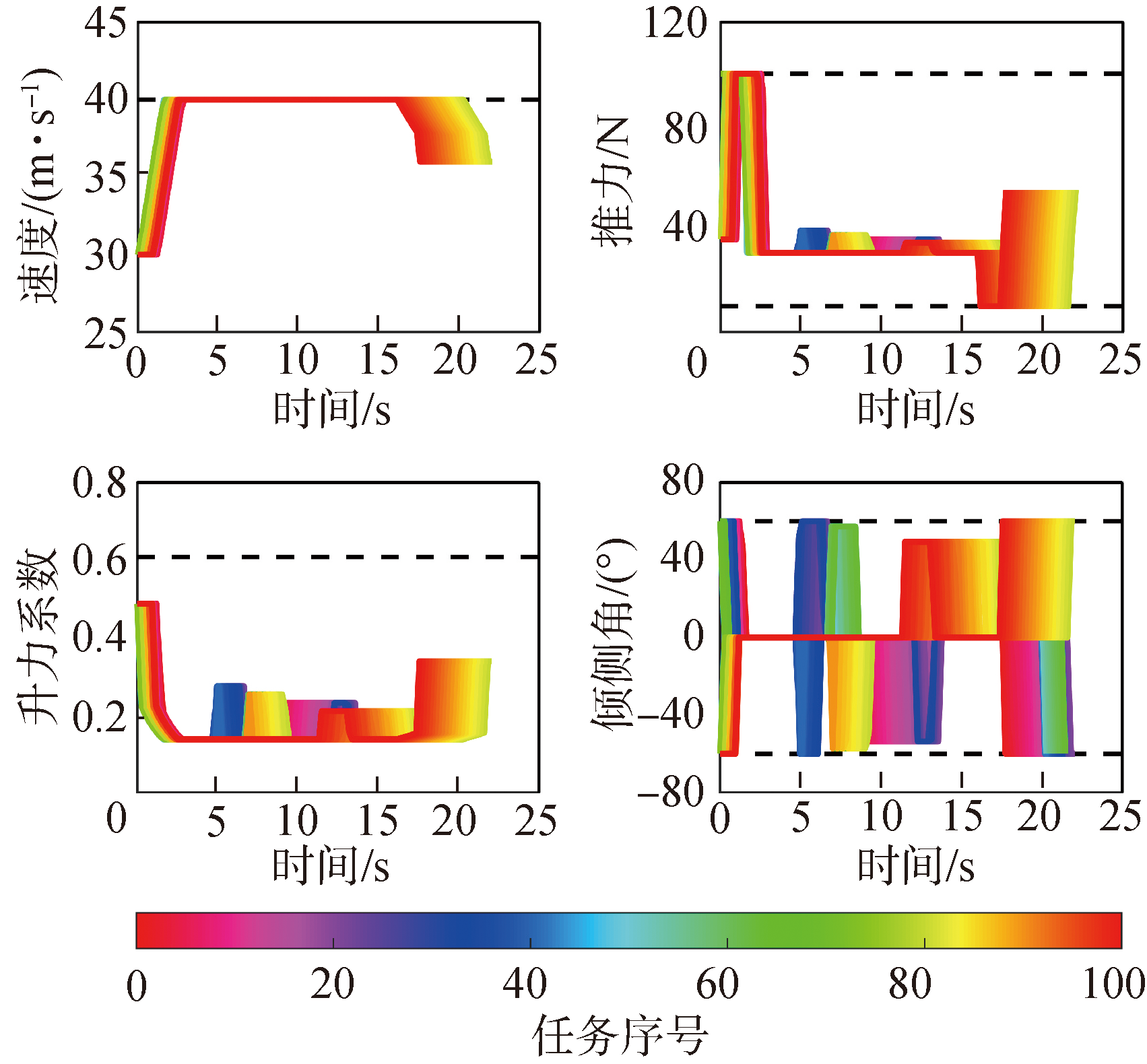
Fig.12 Velocity and control curves got by the proposed method
| 方法 | 平均迭代次数 | 平均计算时间/ms |
|---|---|---|
| 非线性优化[ | 11.53 | 2541.52 |
| 序列凸优化[ | 6.62 | 435.48 |
| 本文方法 | 不需要迭代 | 12.60 |
Table 3 Comparative results of computational efficiencies of different methods
| 方法 | 平均迭代次数 | 平均计算时间/ms |
|---|---|---|
| 非线性优化[ | 11.53 | 2541.52 |
| 序列凸优化[ | 6.62 | 435.48 |
| 本文方法 | 不需要迭代 | 12.60 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
卢颖, 庞黎晨, 陈雨思, 等. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(增刊2):146-156.
|
|
doi: 10.12382/bgxb.2023.0869 |
|
| [10] |
|
| [11] |
关震宇, 杨东晓, 李杰, 等. 基于Dubins 路径的无人机避障规划算法[J]. 北京理工大学学报, 2014, 34(6):570-575.
|
|
|
|
| [12] |
马焱, 冯炜, 罗荣, 等. 复杂不规则海域下固定翼无人机覆盖搜潜路径规划[J]. 兵工学报, 2022, 43(增刊2):40-52.
|
|
doi: 10.12382/bgxb.2022.B024 |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [1] | NAN Wenjiang, YAN Xunliang, YANG Yuxuan, WANG Peichen. Rapid Planning of Longitudinal-lateral Comprehensive Control Reentry Gliding Trajectory Considering Time Constraints [J]. Acta Armamentarii, 2025, 46(3): 240154-. |
| [2] | WANG Dongzhen, ZHANG Yue, ZHAO Yu, HUANG Daqing. A UAV Trajectory Optimization Method Based on RRT-Dubins [J]. Acta Armamentarii, 2024, 45(8): 2761-2773. |
| [3] | WANG Peichen, YAN Xunliang, NAN Wenjiang, LI Xinguo. A Rapid and Near Analytic Planning Method for Gliding Trajectory under Time Constraints [J]. Acta Armamentarii, 2024, 45(7): 2294-2305. |
| [4] | LI Zhengjie, CHEN Hongyin, XIE Junwei, ZHANG Haowei, LIU Bin. A Power Allocation Method for Three-dimensional Maneuvering Tracking of Colocated MIMO Radar Based on Air Defense QoS Model [J]. Acta Armamentarii, 2024, 45(4): 1321-1331. |
| [5] | YIN Qiulin, CHEN Qi, WANG Zhongyuan, WANG Qinghai. Rapid Trajectory Planning for Glide-guided Projectiles in Single-gun Multi-shot Scenarios Considering Time-spatial Coordination [J]. Acta Armamentarii, 2024, 45(3): 798-809. |
| [6] | MEI Zewei, LI Tianren, ZHU Jialin, SHAO Xingling, DING Tianyun, LIU Jun. A Trajectory Planning Method Based on DQN Variable Dynamic Intelligent Decision [J]. Acta Armamentarii, 2024, 45(12): 4395-4406. |
| [7] | DING Tianyun, XIA Yi, MEI Zewei, SHAO Xingling, LIU Jun. A DDPG-based Trajectory Planning Method for Collision Avoidance of Morphing Spacecraft [J]. Acta Armamentarii, 2024, 45(11): 3903-3914. |
| [8] | JIA Yifei, JIANG Chaoyang. Dynamic Reconfigurable Adaptive UGV Formation System [J]. Acta Armamentarii, 2024, 45(10): 3654-3673. |
| [9] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| [10] | ZHAO Junmin, HE Haozhe, WANG Shaoqi, NIE Cong, JIAO Yingjie. Joint Trajectory Planning for Multiple UAVs Target Tracking and Obstacle Avoidance in a Complicated Environment [J]. Acta Armamentarii, 2023, 44(9): 2685-2696. |
| [11] | QUAN Shenming, WANG Zhu, CHAO Tao, YANG Ming. Fast Deorbit Guidance Method Based on Virtual Reentry Angle [J]. Acta Armamentarii, 2023, 44(3): 865-875. |
| [12] | ZHOU Xiaotian, REN Hongbin, SU Bo, QI Zhiquan, WANG Yang. Hierarchical Trajectory Planning Algorithm based on Differential Flatness [J]. Acta Armamentarii, 2023, 44(2): 394-405. |
| [13] | LI Jiajian, SHI Yanjun, YANG Yu, LI Bo, ZHAO Xijun. Multi-agent Reinforcement Learning-based Offloading Decision for UAV Cluster Combat Tasks [J]. Acta Armamentarii, 2023, 44(11): 3295-3309. |
| [14] | HUANG Zhong-rui, ZHOU Qing-song, ZHANG Jian-yun. Waveform Design of MIMO Radar Based on Transmitting Pattern Synthesis [J]. Acta Armamentarii, 2016, 37(5): 851-858. |
| [15] | TANG Chuan-lin,HUANG Chang-qiang,DU Hai-wen,HUANG Han-qiao,DING Da-li,LUO Chang. Study of Trajectory Planning for UCAV Formation Cooperative Attack [J]. Acta Armamentarii, 2014, 35(4): 523-530. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||