
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (6): 1761-1775.doi: 10.12382/bgxb.2023.0342
Previous Articles Next Articles
XIE Xin, ZHENG Jieji**( ), LI Baoyu, YU Bin, FAN Dapeng*()
), LI Baoyu, YU Bin, FAN Dapeng*()
Received:2023-04-16
Online:2024-01-18
Contact:
ZHENG Jieji, FAN Dapeng
CLC Number:
XIE Xin, ZHENG Jieji, LI Baoyu, YU Bin, FAN Dapeng. Online Identification and Adaptive Control Method for Servo Transmission Device in Weapon Station[J]. Acta Armamentarii, 2024, 45(6): 1761-1775.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Typical weapon station
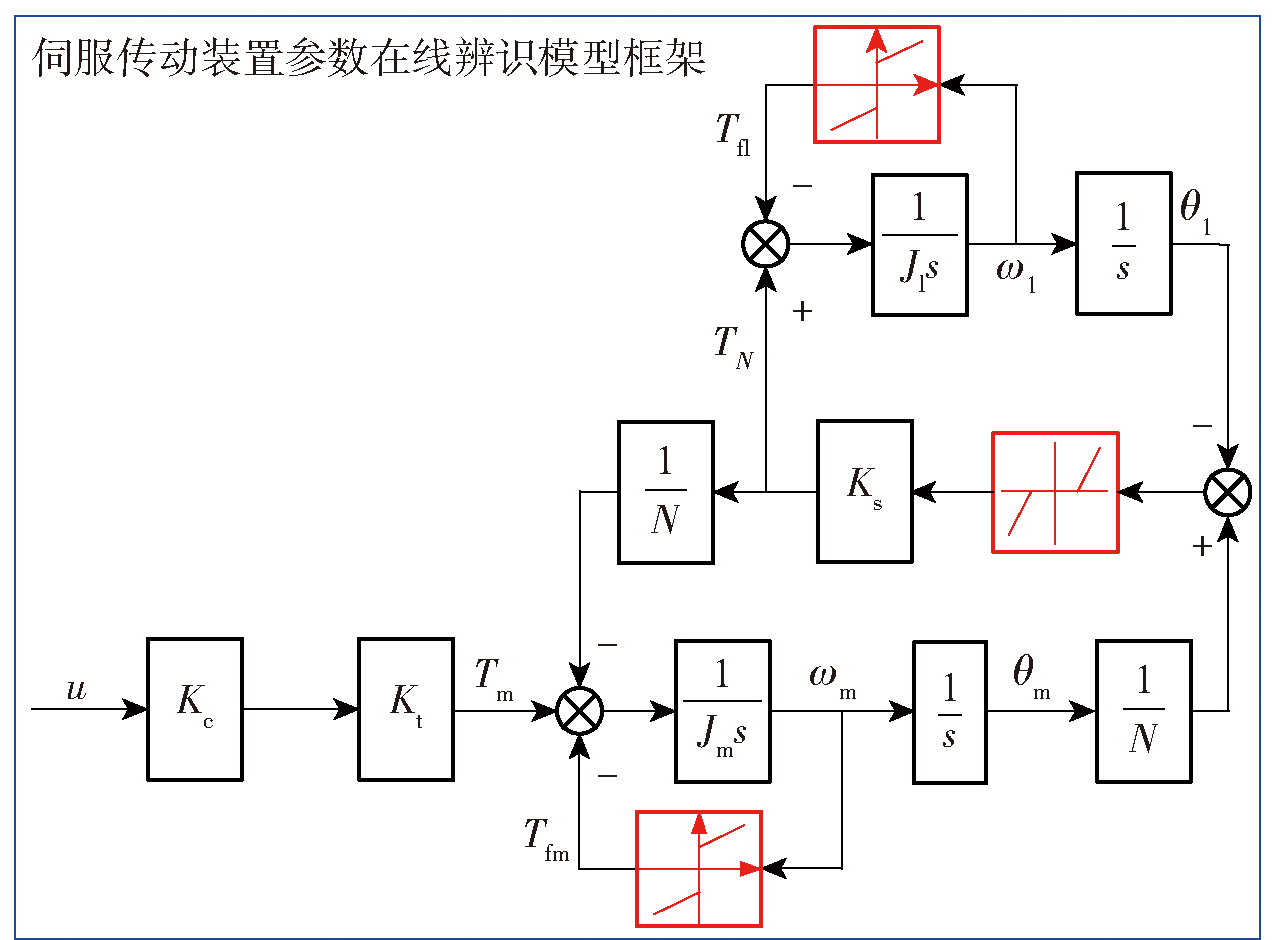
Fig.2 Framework of parameters online identification model

Fig.3 Framework of adaptive composite control method
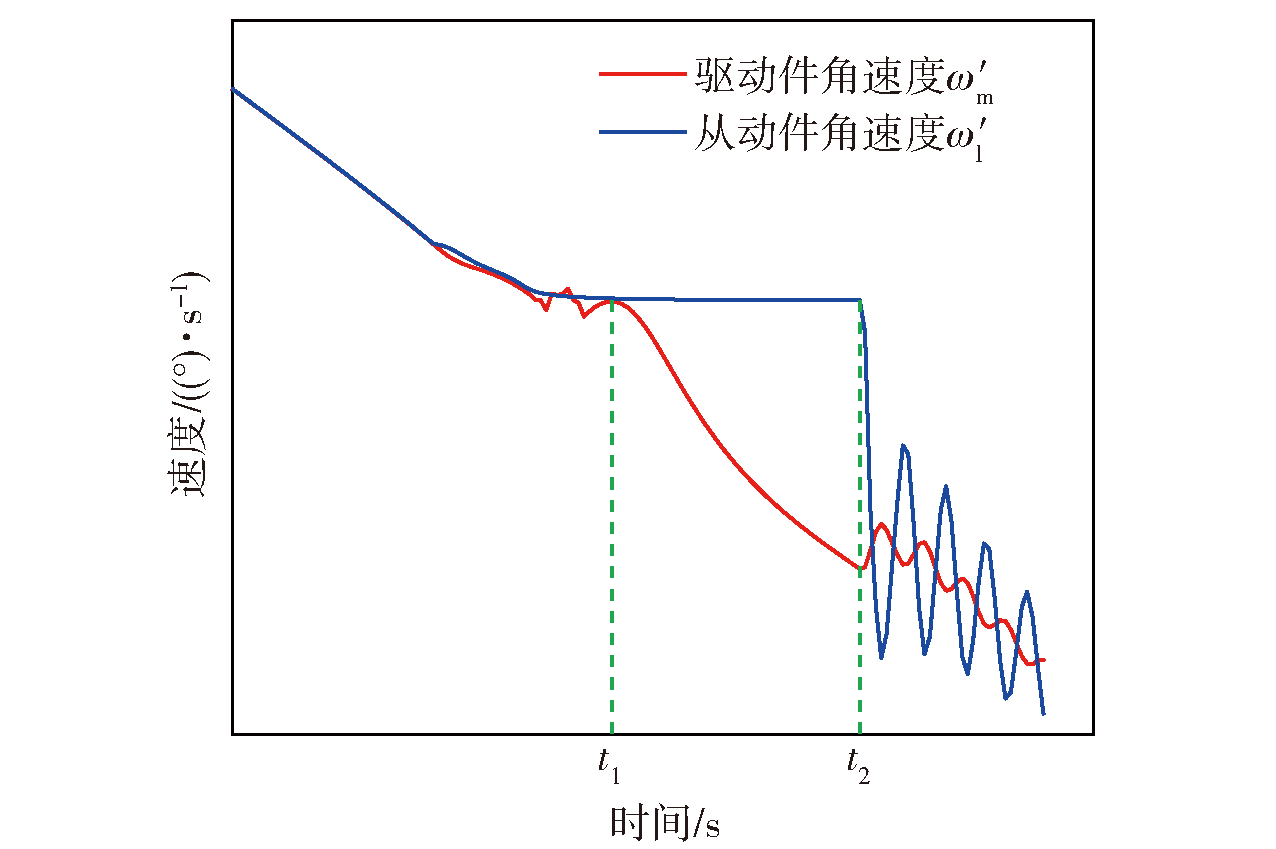
Fig.4 Principle of measurement method for transmission backlash reverse motion
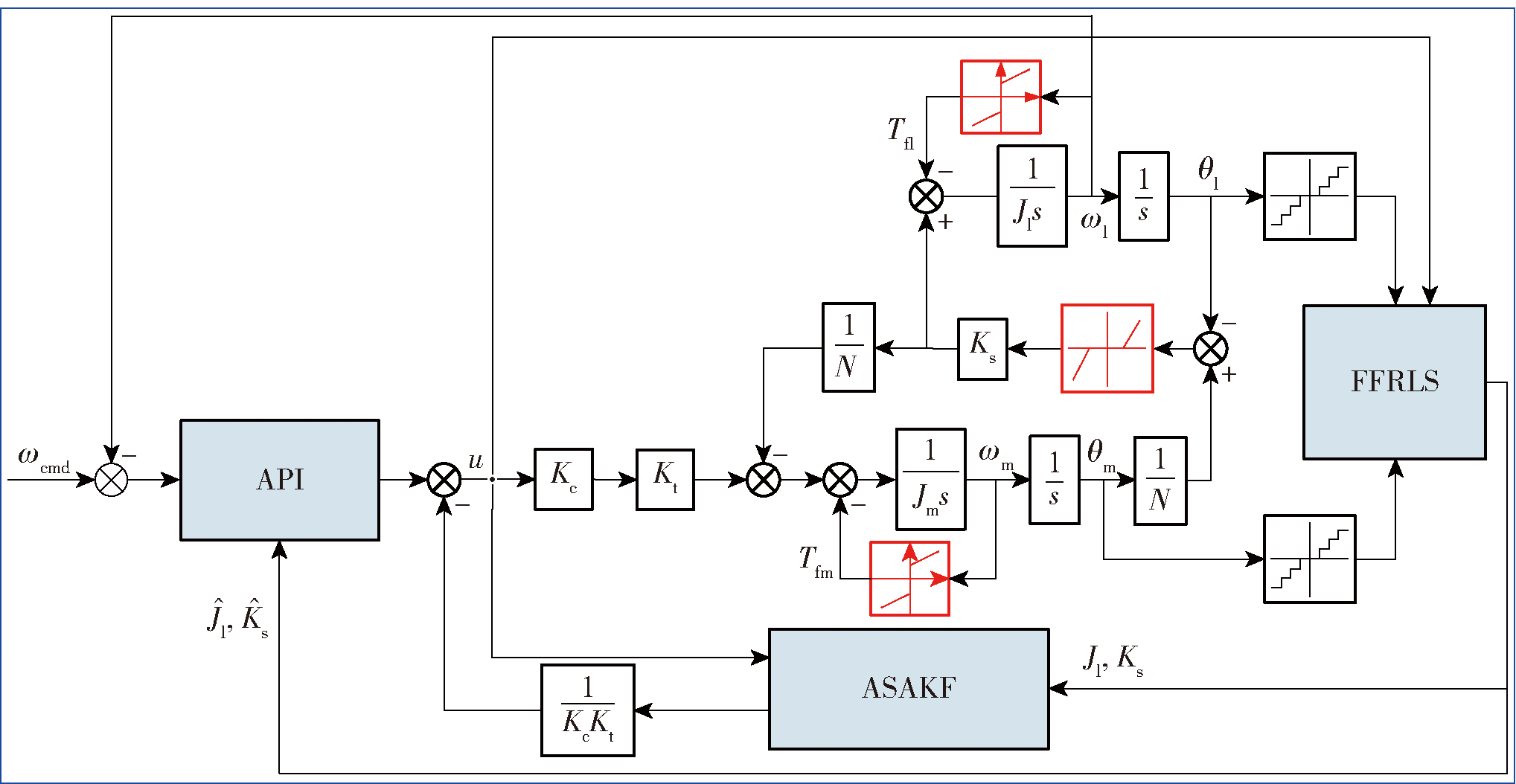
Fig.5 Framework of adaptive composite controller
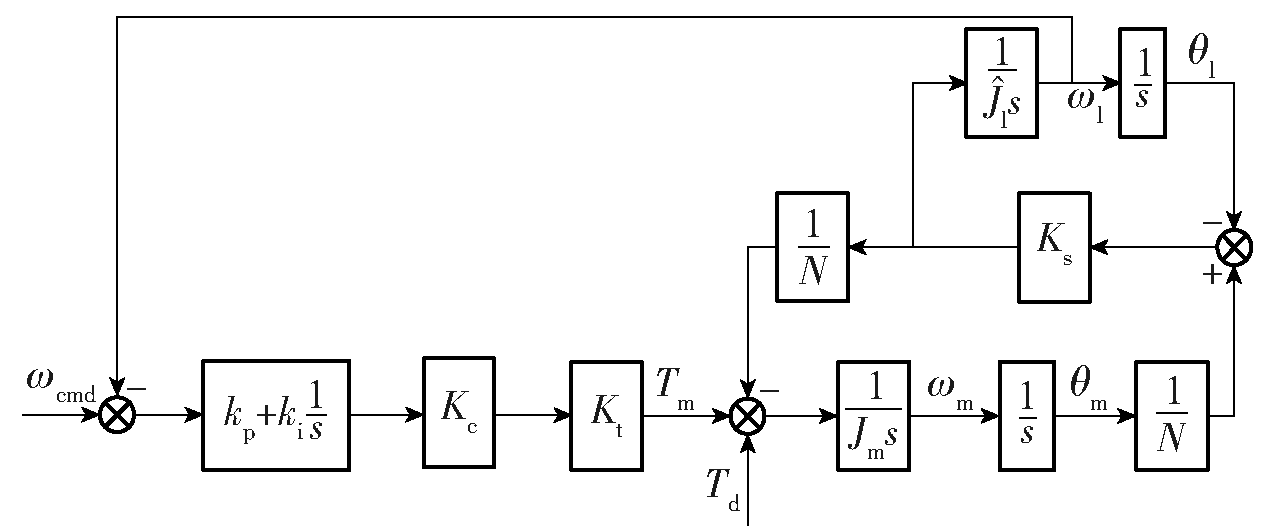
Fig.6 Framework of adaptive proportional integral controller

Fig.7 Servo transmission device testing platform
| 部件名称 | 型号 | 参数 | 数值 |
|---|---|---|---|
| 额定功率/W | 750 | ||
| 额定转矩/(N·m) | 2.39 | ||
| 永磁同步电机 | ASM80B1007-30M | 额定转速/(r·min-1) | 3000 |
| 转矩常数/ (N·m·A-1) | 0.48 | ||
| 转动惯量/(kg·m2) | 1.14×10-4 | ||
| 驱动器 | YD8000 | 转换系数/(A·V-1) | 0.49 |
| 额定扭矩/(N·m) | 150 | ||
| 联轴器 | GSG-82×68 | 容许转速/(r·min-1) | 4000 |
| 扭转刚度/ (N·m·rad-1) | 168000 | ||
| 转动惯量/(kg·m2) | 2.7×10-4 | ||
| 减速比 | 161 | ||
| 最大输出转矩/(N·m) | 450 | ||
| 精密减速器 | ZKRV-20E-161-B | 最大输出转速/ (r·min-1) | 75 |
| 传动间隙/arcmin | ≤1 | ||
| 传动刚度/ (N·m·rad-1) | 5×105 | ||
| 绝对编码器 | BCE112K50 | 角度分辨率/bit | 19 |
| 惯量盘 | 转动惯量/(kg·m2) | 0.22 | |
| 砝码 | 质量/kg | 5 | |
| 个数 | 12 |
Table 1 Component models and parameter values of servo transmission device testing platform
| 部件名称 | 型号 | 参数 | 数值 |
|---|---|---|---|
| 额定功率/W | 750 | ||
| 额定转矩/(N·m) | 2.39 | ||
| 永磁同步电机 | ASM80B1007-30M | 额定转速/(r·min-1) | 3000 |
| 转矩常数/ (N·m·A-1) | 0.48 | ||
| 转动惯量/(kg·m2) | 1.14×10-4 | ||
| 驱动器 | YD8000 | 转换系数/(A·V-1) | 0.49 |
| 额定扭矩/(N·m) | 150 | ||
| 联轴器 | GSG-82×68 | 容许转速/(r·min-1) | 4000 |
| 扭转刚度/ (N·m·rad-1) | 168000 | ||
| 转动惯量/(kg·m2) | 2.7×10-4 | ||
| 减速比 | 161 | ||
| 最大输出转矩/(N·m) | 450 | ||
| 精密减速器 | ZKRV-20E-161-B | 最大输出转速/ (r·min-1) | 75 |
| 传动间隙/arcmin | ≤1 | ||
| 传动刚度/ (N·m·rad-1) | 5×105 | ||
| 绝对编码器 | BCE112K50 | 角度分辨率/bit | 19 |
| 惯量盘 | 转动惯量/(kg·m2) | 0.22 | |
| 砝码 | 质量/kg | 5 | |
| 个数 | 12 |
| 参数/单位 | 空载 | 带载 |
|---|---|---|
| 负载转动惯量Jl/(kg·m2) | 0.22 | 0.45 |
| 传动刚度Ks/(N·m·rad-1) | 1×106 | 1×106 |
| 电机黏滞阻尼系数Bm/(N·m·rad-1·s) | 0.005 | 0.005 |
| 负载黏滞阻尼系数Bl/(N·m·rad-1·s) | 20 | 20 |
| 电机正库伦摩擦力矩 /(N·m) | 0.1 | 0.1 |
| 电机负库伦摩擦力矩 /(N·m) | -0.1 | -0.1 |
| 负载正库伦摩擦力矩 /(N·m) | 5 | 5 |
| 负载负库伦摩擦力矩 /(N·m) | -5 | -5 |
| 传动间隙2θb/arcmin | 1 | 1 |
Table 2 Set values of parameters to be identified in the simulation model
| 参数/单位 | 空载 | 带载 |
|---|---|---|
| 负载转动惯量Jl/(kg·m2) | 0.22 | 0.45 |
| 传动刚度Ks/(N·m·rad-1) | 1×106 | 1×106 |
| 电机黏滞阻尼系数Bm/(N·m·rad-1·s) | 0.005 | 0.005 |
| 负载黏滞阻尼系数Bl/(N·m·rad-1·s) | 20 | 20 |
| 电机正库伦摩擦力矩 /(N·m) | 0.1 | 0.1 |
| 电机负库伦摩擦力矩 /(N·m) | -0.1 | -0.1 |
| 负载正库伦摩擦力矩 /(N·m) | 5 | 5 |
| 负载负库伦摩擦力矩 /(N·m) | -5 | -5 |
| 传动间隙2θb/arcmin | 1 | 1 |
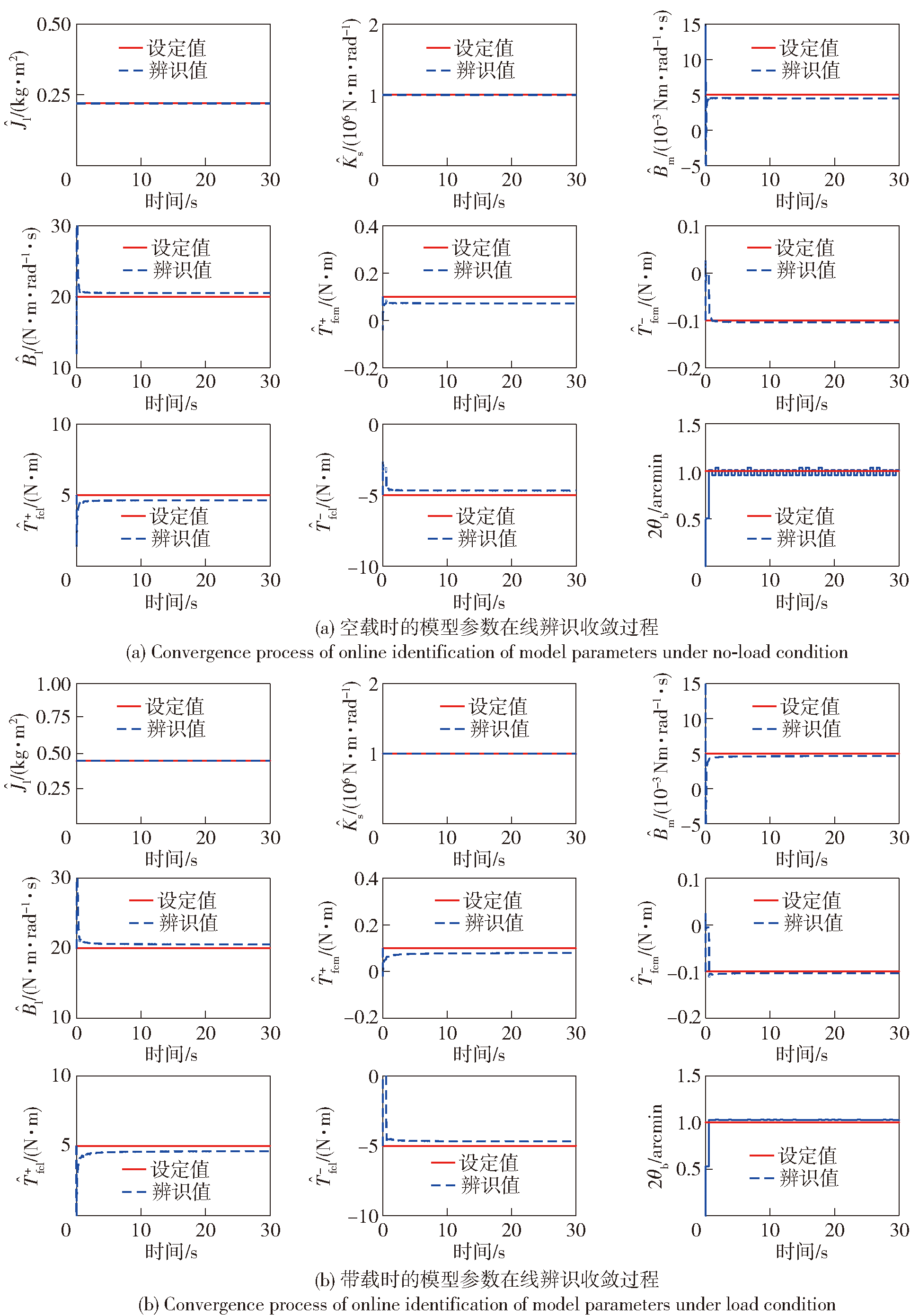
Fig.8 Convergence process of online identification of model parameters
| 参数 | 空载 | 带载 | ||
|---|---|---|---|---|
| 辨识值 | 辨识误差/% | 辨识值 | 辨识误差/% | |
| 负载转动惯量Jl/(kg·m2) | 0.22 | 0 | 0.451 | 0.22 |
| 传动刚度Ks/(N·m·rad-1) | 1×106 | 0 | 1×106 | 0 |
| 电机黏滞阻尼系数Bm/(N·m·rad-1·s) | 0.0046 | 6.6 | 0.0047 | 6 |
| 负载黏滞阻尼系数Bl/(N·m·rad-1·s) | 20.54 | 2.7 | 20.55 | 2.75 |
| 电机正库伦摩擦力矩 /(N·m) | 0.0904 | 9.6 | 0.091 | 9 |
| 电机负库伦摩擦力矩 /(N·m) | -0.1034 | 0.34 | -0.103 | 0.3 |
| 负载正库伦摩擦力矩 /(N·m) | 4.612 | 7.76 | 4.607 | 7.86 |
| 负载负库伦摩擦力矩 /(N·m) | -4.68 | 6.4 | -4.675 | 6.5 |
| 传动间隙2θb/arcmin | 1~1.1 | 10 | 1.1 | 10 |
Table 3 Steady state convergence results of online identification of model parameters
| 参数 | 空载 | 带载 | ||
|---|---|---|---|---|
| 辨识值 | 辨识误差/% | 辨识值 | 辨识误差/% | |
| 负载转动惯量Jl/(kg·m2) | 0.22 | 0 | 0.451 | 0.22 |
| 传动刚度Ks/(N·m·rad-1) | 1×106 | 0 | 1×106 | 0 |
| 电机黏滞阻尼系数Bm/(N·m·rad-1·s) | 0.0046 | 6.6 | 0.0047 | 6 |
| 负载黏滞阻尼系数Bl/(N·m·rad-1·s) | 20.54 | 2.7 | 20.55 | 2.75 |
| 电机正库伦摩擦力矩 /(N·m) | 0.0904 | 9.6 | 0.091 | 9 |
| 电机负库伦摩擦力矩 /(N·m) | -0.1034 | 0.34 | -0.103 | 0.3 |
| 负载正库伦摩擦力矩 /(N·m) | 4.612 | 7.76 | 4.607 | 7.86 |
| 负载负库伦摩擦力矩 /(N·m) | -4.68 | 6.4 | -4.675 | 6.5 |
| 传动间隙2θb/arcmin | 1~1.1 | 10 | 1.1 | 10 |

Fig.9 Convergence process of online identification of servo transmission device parameters
| 参数 | 空载 | 带载 |
|---|---|---|
| 负载转动惯量Jl/(kg·m2) | 0.246 | 0.453 |
| 传动刚度Ks/(N·m·rad-1) | 9.7×105 | 8.9×105 |
| 电机黏滞阻尼系数Bm/(N·m·rad-1·s) | 2.4×10-3 | 2.4×10-3 |
| 负载黏滞阻尼系数Bl/(N·m·rad-1·s) | 23.17 | 25.23 |
| 电机正库伦摩擦力矩 /(N·m) | 0.1 | 0.11 |
| 电机负库伦摩擦力矩 /(N·m) | -0.095 | -0.12 |
| 负载正库伦摩擦力矩 /(N·m) | 1.9 | 2.89 |
| 负载负库伦摩擦力矩 /(N·m) | -1.86 | -2.01 |
| 传动间隙2θb/arcmin | 0.82 | 1.74 |
Table 4 Steady state convergence results of online identification of servo transmission device parameters
| 参数 | 空载 | 带载 |
|---|---|---|
| 负载转动惯量Jl/(kg·m2) | 0.246 | 0.453 |
| 传动刚度Ks/(N·m·rad-1) | 9.7×105 | 8.9×105 |
| 电机黏滞阻尼系数Bm/(N·m·rad-1·s) | 2.4×10-3 | 2.4×10-3 |
| 负载黏滞阻尼系数Bl/(N·m·rad-1·s) | 23.17 | 25.23 |
| 电机正库伦摩擦力矩 /(N·m) | 0.1 | 0.11 |
| 电机负库伦摩擦力矩 /(N·m) | -0.095 | -0.12 |
| 负载正库伦摩擦力矩 /(N·m) | 1.9 | 2.89 |
| 负载负库伦摩擦力矩 /(N·m) | -1.86 | -2.01 |
| 传动间隙2θb/arcmin | 0.82 | 1.74 |
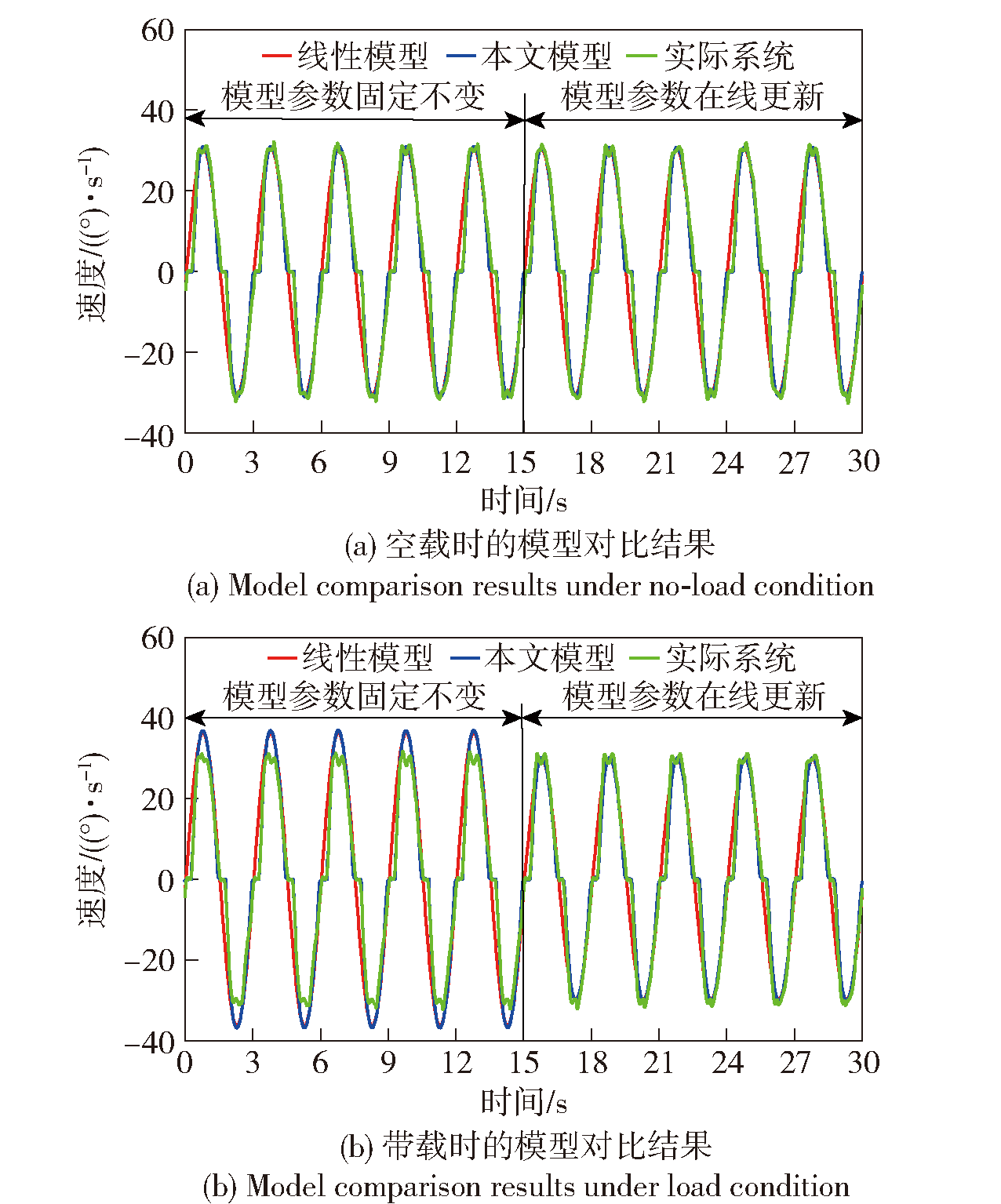
Fig.10 Comparison results of fitting degrees among different models and actual systems
| 工况 | 线性模型 | 本文模型 | |||||
|---|---|---|---|---|---|---|---|
| 参数固 定不变 | 参数在 线更新 | 降低/ % | 参数固 定不变 | 降低/ % | 参数在 线更新 | 降低/ % | |
| 空载 | 5.23 | 5.16 | 1.34 | 2.12 | 59.46 | 2.11 | 59.66 |
| 带载 | 6.83 | 4.36 | 36.16 | 3.52 | 48.46 | 2.37 | 65.30 |
Table 5 Root mean squares of fitting errors among different models and actual systems
| 工况 | 线性模型 | 本文模型 | |||||
|---|---|---|---|---|---|---|---|
| 参数固 定不变 | 参数在 线更新 | 降低/ % | 参数固 定不变 | 降低/ % | 参数在 线更新 | 降低/ % | |
| 空载 | 5.23 | 5.16 | 1.34 | 2.12 | 59.46 | 2.11 | 59.66 |
| 带载 | 6.83 | 4.36 | 36.16 | 3.52 | 48.46 | 2.37 | 65.30 |
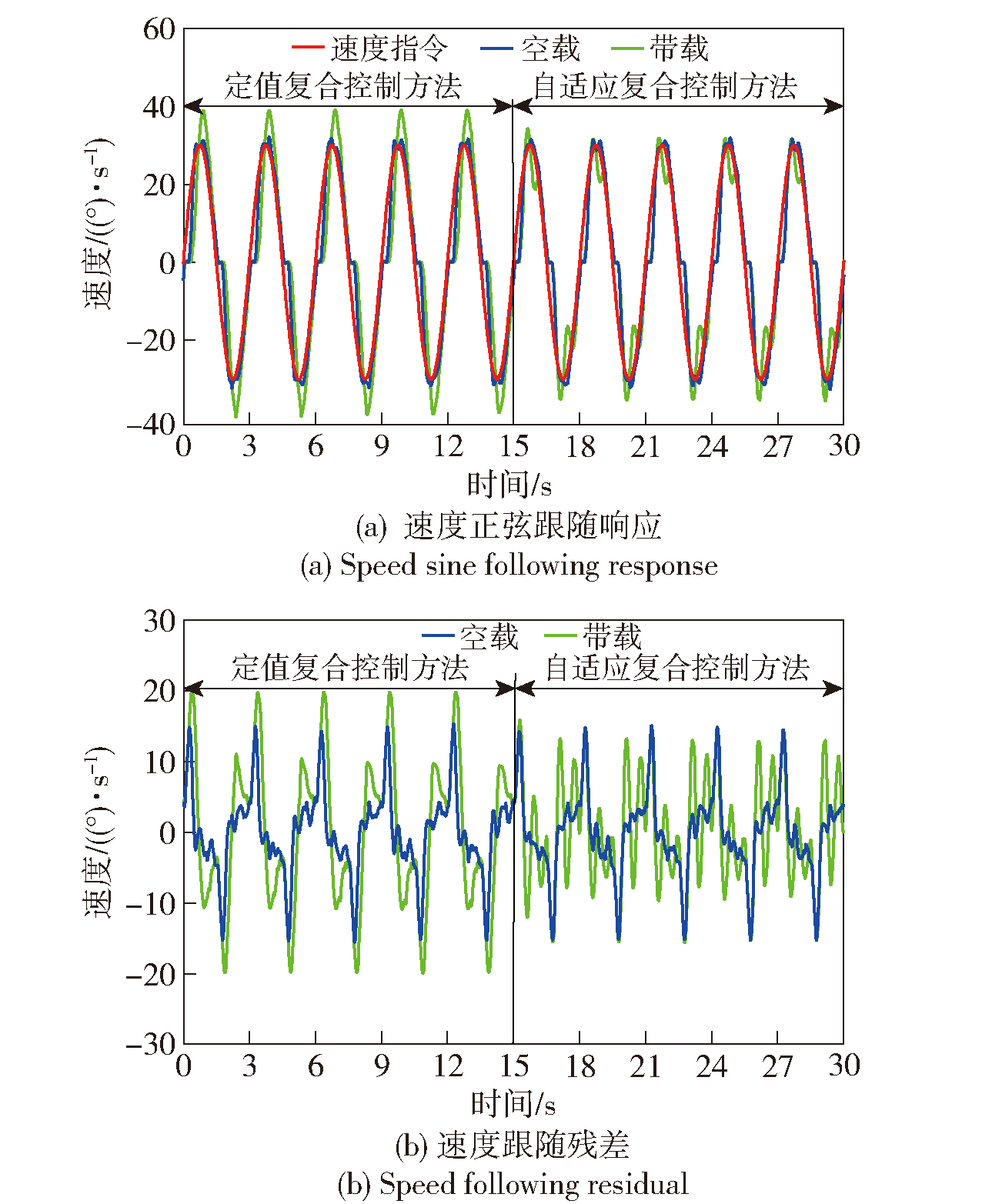
Fig.11 Validation test results of adaptive composite control method
| 工况 | 定值复合控制方法 | 自适应复合控制方法 | 降低/% |
|---|---|---|---|
| 空载 | 5.92 | 5.87 | 0.84 |
| 带载 | 10.34 | 7.42 | 28.24 |
Table 6 Root mean squares of speed following residuals for different control methods
| 工况 | 定值复合控制方法 | 自适应复合控制方法 | 降低/% |
|---|---|---|---|
| 空载 | 5.92 | 5.87 | 0.84 |
| 带载 | 10.34 | 7.42 | 28.24 |
| [1] |
向学辅, 刘启辉, 陈浩, 等. 独立跟瞄式遥控武器站控制系统稳定性分析[J]. 兵器装备工程学报, 2021, 42(2): 168-173.
|
|
|
|
| [2] |
刘浩, 徐宏斌, 李正宇, 等. 无人武器站的轻量化设计[J]. 弹箭与制导学报, 2021, 41(2): 64-67.
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
程勇, 孙汉旭, 叶平, 等. 未知负载转矩下机械臂关节参数在线辨识及控制参数在线研究[J]. 机械设计与制造, 2016(11): 30-33,37.
|
|
|
|
| [7] |
程善美, 张益. 基于协同粒子群算法的PMSM在线参数辨识[J]. 电气传动, 2012, 42(11).
|
|
|
|
| [8] |
熊琰, 李叶松. 基于粒子群优化的伺服谐振系统的参数辨识[J]. 华中科技大学学报(自然科学版), 2014, 42(12): 111-115.
|
|
|
|
| [9] |
|
| [10] |
doi: 10.1016/j.isatra.2013.03.002 pmid: 23659836 |
| [11] |
doi: S0019-0578(17)30617-1 pmid: 29224853 |
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
祁超, 范世珣, 谢馨, 等. 光电稳定平台伺服机构低速及稳定性能控制方法研究[J]. 兵工学报, 2018, 39(10): 1873-1882.
doi: 10.3969/j.issn.1000-1093.2018.10.001 |
|
doi: 10.3969/j.issn.1000-1093.2018.10.001 |
|
| [19] |
|
| [20] |
|
| [1] | BAO Dan, WEI Yukai, JIN Xin, HOU Baolin. Adaptive Control of Magazines Considering Output Constraints and Input Saturation [J]. Acta Armamentarii, 2024, 45(3): 789-797. |
| [2] | YU Zhilong, LI Yinghui, PEI Binbin, XU Wenfeng, DUAN Xiaocong, SONG Kexin. Robust Adaptive Fault-tolerant Attitude Control of Flying-wing UAVs with Flight Envelope Constraints [J]. Acta Armamentarii, 2024, 45(1): 231-240. |
| [3] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [4] | MIN Boxu, GAO Jian, JING Anyan, CHEN Yimin, WANG Jiarun, PAN Guang. Robust Event-triggered Adaptive Pitch Attitude Control for Underwater Gliders with Actuator Faults [J]. Acta Armamentarii, 2023, 44(7): 2092-2100. |
| [5] | WAN Ziping, TAN Ruoyu, ZHENG Jieji, REN Guang'an, XIE Xin, FAN Dapeng. Efficient Design Method of Multi-condition and Static and Dynamic Reinforced Wall Structure for Modular Base of Weapon Station [J]. Acta Armamentarii, 2023, 44(2): 577-590. |
| [6] | LI Xianyan, XU Wei, JIANG Lei, SUN Zeyuan, XIE Qiang, ZENG Yi, ZHENG Dongdong. Adaptive Prescribed Performance Control of Autonomous Vehicles with Input Saturation [J]. Acta Armamentarii, 2023, 44(11): 3310-3319. |
| [7] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [8] | YUAN Shusen, DENG Wenxiang, YAO Jianyong, YANG Guolai. Adaptive Integral Robust Control for the Bidirectional Stability System of All-electric Tanks [J]. Acta Armamentarii, 2023, 44(1): 140-155. |
| [9] | DENG Wei, MAO Bao-quan, FENG Shuai, LI Cheng. Optimization of Muzzle Disturbance of Overhead Weapon Station Based on Kriging Model [J]. Acta Armamentarii, 2016, 37(10): 1795-1802. |
| [10] | XIE Zheng, XIE Jian, DU Wen-zheng, LI Liang, GUO Yang. Sliding Mode Control for Hydraulic Erecting System of Large Launcher [J]. Acta Armamentarii, 2015, 36(4): 674-680. |
| [11] | ZHANG Yi-chao, ZHOU Xu-chang, ZHOU Hao. Decentralized Adaptive Variable Structure Control for Banktoturn Torpedo [J]. Acta Armamentarii, 2013, 34(11): 1469-1473. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||