
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (11): 3529-3542.doi: 10.12382/bgxb.2022.1301
Special Issue: 群体协同与自主技术
LI Zuoxuan1, JIA Liangyue2,3, HAO Jia1,*( ), WANG Chao4, WANG Guoxin1, MING Zhenjun1, YAN Yan1
), WANG Chao4, WANG Guoxin1, MING Zhenjun1, YAN Yan1
Received:2022-12-30
Online:2023-06-14
Contact:
HAO Jia
CLC Number:
LI Zuoxuan, JIA Liangyue, HAO Jia, WANG Chao, WANG Guoxin, MING Zhenjun, YAN Yan. Lightweight Optimization Design of Unmanned Vehicle Body Structure Based on Multi-working Conditions Correlation[J]. Acta Armamentarii, 2023, 44(11): 3529-3542.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Truss body structure model of an unmanned vehicle
| 车身结构、工况 环境及车身材料 | 设计参数 | 取值范围 |
|---|---|---|
| L/mm | 3620~3820 | |
| W/mm | 1300~1500 | |
| H/mm | 620~820 | |
| T/mm | 2~6 | |
| 车身结构 | L1/mm | 60~80 |
| W1/mm | 40~60 | |
| L2/mm | 40~60 | |
| W2/mm | 20~40 | |
| L3/mm | 20~40 | |
| W3/mm | 10~20 | |
| 冲击工况 | ||
| 制动工况 | ||
| 转弯工况 | ||
| 工况环境 | 7种不同工况类型C | 弯曲工况 |
| 扭转1轮工况 | ||
| 扭转2轮工况 | ||
| 射击工况 | ||
| 车身材料 | 材料编号M | 碳素钢、铝合金、钛合金 |
Table 1 Parameters of truss body structure model of unmanned vehicle and multi-working environment
| 车身结构、工况 环境及车身材料 | 设计参数 | 取值范围 |
|---|---|---|
| L/mm | 3620~3820 | |
| W/mm | 1300~1500 | |
| H/mm | 620~820 | |
| T/mm | 2~6 | |
| 车身结构 | L1/mm | 60~80 |
| W1/mm | 40~60 | |
| L2/mm | 40~60 | |
| W2/mm | 20~40 | |
| L3/mm | 20~40 | |
| W3/mm | 10~20 | |
| 冲击工况 | ||
| 制动工况 | ||
| 转弯工况 | ||
| 工况环境 | 7种不同工况类型C | 弯曲工况 |
| 扭转1轮工况 | ||
| 扭转2轮工况 | ||
| 射击工况 | ||
| 车身材料 | 材料编号M | 碳素钢、铝合金、钛合金 |
| 材料名称 | 质量密度/(t·mm-3) | 弹性模量/MPa | 泊松比 |
|---|---|---|---|
| 碳素钢 | 7.80×10-9 | 2.01×105 | 0.26 |
| 铝合金 | 2.78×10-9 | 0.70×105 | 0.26 |
| 钛合金 | 4.50×10-9 | 1.10×105 | 0.34 |
Table 2 Property parameters of different materials
| 材料名称 | 质量密度/(t·mm-3) | 弹性模量/MPa | 泊松比 |
|---|---|---|---|
| 碳素钢 | 7.80×10-9 | 2.01×105 | 0.26 |
| 铝合金 | 2.78×10-9 | 0.70×105 | 0.26 |
| 钛合金 | 4.50×10-9 | 1.10×105 | 0.34 |

Fig.2 Static load applied on body structure

Fig.3 Load application under different working conditions
| 工况类型 | 约束方向 | 载荷施加 | |||
|---|---|---|---|---|---|
| 左侧前轮 | 右侧前轮 | 左侧后轮 | 右侧后轮 | ||
| 冲击工况 | X,Y,Z | X,Y,Z | X,Y,Z | X,Y,Z | 6g的Y轴方向全局载荷 |
| 制动工况 | X,Y,Z | X,Y,Z | Y,Z | Y,Z | 0.8g的X轴方向全局载荷 |
| 转弯工况 | X,Y,Z | X,Y | X,Y,Z | X,Y | 0.7g的Z轴方向全局载荷 |
| 弯曲工况 | X,Y | X,Y | Y,Z | Y,Z | 3g的Y轴方向全局载荷 |
| 扭转1轮工况 | X,Y,Z | X,Y,Z | X,Y | X,Y,Z | 6g的Y轴方向全局载荷 |
| 扭转2轮工况 | X,Y,Z | X,Y,Z | X,Y | X,Y | 3g的Y轴方向全局载荷 |
| 射击工况 | X,Y,Z | X,Y,Z | X,Y,Z | X,Y,Z | 3g的Y轴方向载荷外,还需要在顶端 射击开口处施加30kN压力 |
Table 3 Constraints and loads in 7 different working conditions
| 工况类型 | 约束方向 | 载荷施加 | |||
|---|---|---|---|---|---|
| 左侧前轮 | 右侧前轮 | 左侧后轮 | 右侧后轮 | ||
| 冲击工况 | X,Y,Z | X,Y,Z | X,Y,Z | X,Y,Z | 6g的Y轴方向全局载荷 |
| 制动工况 | X,Y,Z | X,Y,Z | Y,Z | Y,Z | 0.8g的X轴方向全局载荷 |
| 转弯工况 | X,Y,Z | X,Y | X,Y,Z | X,Y | 0.7g的Z轴方向全局载荷 |
| 弯曲工况 | X,Y | X,Y | Y,Z | Y,Z | 3g的Y轴方向全局载荷 |
| 扭转1轮工况 | X,Y,Z | X,Y,Z | X,Y | X,Y,Z | 6g的Y轴方向全局载荷 |
| 扭转2轮工况 | X,Y,Z | X,Y,Z | X,Y | X,Y | 3g的Y轴方向全局载荷 |
| 射击工况 | X,Y,Z | X,Y,Z | X,Y,Z | X,Y,Z | 3g的Y轴方向载荷外,还需要在顶端 射击开口处施加30kN压力 |

Fig.4 Overall steps of optimization method

Fig.5 Design space dynamic reduction
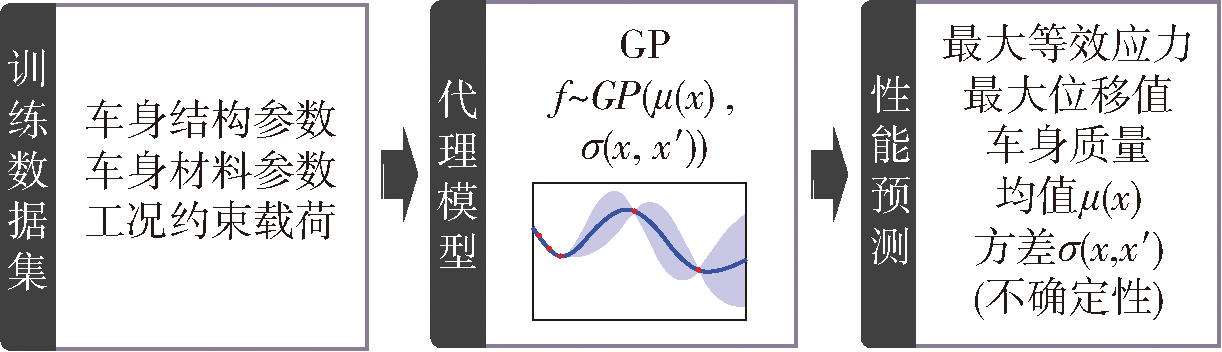
Fig.6 Construction of Gaussian process surrogate model

Fig.7 Variable interval reduction method

Fig.8 Multi-condition body structure optimization based on genetic algorithm
| 超参数名称 | 取值 |
|---|---|
| 种群数目 | 500 |
| 遗传代数 | 500 |
| 交叉概率 | 0.7 |
| 变异概率 | 0.2 |
| 精英策略 | 每代保留最好的1个点 |
Table 4 GA superparameters
| 超参数名称 | 取值 |
|---|---|
| 种群数目 | 500 |
| 遗传代数 | 500 |
| 交叉概率 | 0.7 |
| 变异概率 | 0.2 |
| 精英策略 | 每代保留最好的1个点 |
| 工况类型 | 预测误差/% | 预测正确率/% | |||
|---|---|---|---|---|---|
| RDS-GP | GP | ANN | RDS-GP | GP | |
| 冲击工况 | 5.07 | 5.07 | 98 | ||
| 制动工况 | 7.79 | 4.29 | 98 | ||
| 转弯工况 | 4.97 | 6.25 | 98 | ||
| 弯曲工况 | 6.55 | 5.13 | 98 | ||
| 扭转1轮工况 | 7.28 | 7.51 | 98 | ||
| 扭转2轮工况 | 11.40 | 4.80 | 78 | ||
| 射击工况 | 11.90 | 5.51 | 90 | ||
Table 5 Predicted maximum stress errors of the surrogate model
| 工况类型 | 预测误差/% | 预测正确率/% | |||
|---|---|---|---|---|---|
| RDS-GP | GP | ANN | RDS-GP | GP | |
| 冲击工况 | 5.07 | 5.07 | 98 | ||
| 制动工况 | 7.79 | 4.29 | 98 | ||
| 转弯工况 | 4.97 | 6.25 | 98 | ||
| 弯曲工况 | 6.55 | 5.13 | 98 | ||
| 扭转1轮工况 | 7.28 | 7.51 | 98 | ||
| 扭转2轮工况 | 11.40 | 4.80 | 78 | ||
| 射击工况 | 11.90 | 5.51 | 90 | ||
| 工况 类型 | 预测误差/% | 预测正确率/% | |||
|---|---|---|---|---|---|
| RDS-GP | GP | ANN | RDS-GP | GP | |
| 冲击工况 | 0.63 | 6.72 | 98 | ||
| 制动工况 | 0.94 | 6.72 | 92 | ||
| 转弯工况 | 0.81 | 4.73 | 78 | 98 | |
| 弯曲工况 | 1.29 | 7.23 | 90 | ||
| 扭转1轮工况 | 1.91 | 5.58 | 90 | ||
| 扭转2轮工况 | 1.95 | 2.89 | 96 | ||
| 射击工况 | 1.99 | 4.66 | 86 | ||
Table 6 Predicted maximum displacement errors of the surrogate model
| 工况 类型 | 预测误差/% | 预测正确率/% | |||
|---|---|---|---|---|---|
| RDS-GP | GP | ANN | RDS-GP | GP | |
| 冲击工况 | 0.63 | 6.72 | 98 | ||
| 制动工况 | 0.94 | 6.72 | 92 | ||
| 转弯工况 | 0.81 | 4.73 | 78 | 98 | |
| 弯曲工况 | 1.29 | 7.23 | 90 | ||
| 扭转1轮工况 | 1.91 | 5.58 | 90 | ||
| 扭转2轮工况 | 1.95 | 2.89 | 96 | ||
| 射击工况 | 1.99 | 4.66 | 86 | ||
| 工况 类型 | 预测误差/% | 预测正确率/% | |||
|---|---|---|---|---|---|
| RDS-GP | GP | ANN | RDS-GP | GP | |
| 冲击工况 | 0 | 0.64 | 100 | ||
| 制动工况 | 0 | 0.62 | 86 | ||
| 转弯工况 | 0.09 | 1.20 | 98 | ||
| 弯曲工况 | 0.04 | 0.75 | 100 | ||
| 扭转1轮工况 | 0.01 | 0.88 | 90 | ||
| 扭转2轮工况 | 2.08 | 1.07 | 96 | ||
| 射击工况 | 0.54 | 1.18 | 96 | ||
Table 7 Predicted body mass errors of the surrogate model
| 工况 类型 | 预测误差/% | 预测正确率/% | |||
|---|---|---|---|---|---|
| RDS-GP | GP | ANN | RDS-GP | GP | |
| 冲击工况 | 0 | 0.64 | 100 | ||
| 制动工况 | 0 | 0.62 | 86 | ||
| 转弯工况 | 0.09 | 1.20 | 98 | ||
| 弯曲工况 | 0.04 | 0.75 | 100 | ||
| 扭转1轮工况 | 0.01 | 0.88 | 90 | ||
| 扭转2轮工况 | 2.08 | 1.07 | 96 | ||
| 射击工况 | 0.54 | 1.18 | 96 | ||

Fig.9 Changing trend of predicted errors of the surrogate model
| 参数变量及优化目标 | RDS-GP | GP | ANN | |
|---|---|---|---|---|
| L | 3620.01 | 3620.00 | 3621.17 | |
| W | 1300.00 | 1318.95 | 1300.00 | |
| H | 620.00 | 720.00 | 620.01 | |
| L1 | 60.00 | 65.81 | 75.83 | |
| W1 | 51.26 | 50.00 | 52.20 | |
| 参数变量 | L2 | 51.26 | 50.00 | 52.20 |
| W2 | 36.69 | 39.28 | 39.98 | |
| L3 | 36.69 | 39.28 | 39.98 | |
| W3 | 15.00 | 14.68 | 19.98 | |
| T | 5.00 | 5.07 | 4.00 | |
| M | 碳素钢 | 碳素钢 | 碳素钢 | |
| 优化目标 | Mass | 445.45 | 486.88 | 380.93 |
Table 8 Comparison of different optimal body structure schemes
| 参数变量及优化目标 | RDS-GP | GP | ANN | |
|---|---|---|---|---|
| L | 3620.01 | 3620.00 | 3621.17 | |
| W | 1300.00 | 1318.95 | 1300.00 | |
| H | 620.00 | 720.00 | 620.01 | |
| L1 | 60.00 | 65.81 | 75.83 | |
| W1 | 51.26 | 50.00 | 52.20 | |
| 参数变量 | L2 | 51.26 | 50.00 | 52.20 |
| W2 | 36.69 | 39.28 | 39.98 | |
| L3 | 36.69 | 39.28 | 39.98 | |
| W3 | 15.00 | 14.68 | 19.98 | |
| T | 5.00 | 5.07 | 4.00 | |
| M | 碳素钢 | 碳素钢 | 碳素钢 | |
| 优化目标 | Mass | 445.45 | 486.88 | 380.93 |
| 工况类型及 优化目标 | RDS-GP | GP | ANN | ||||
|---|---|---|---|---|---|---|---|
| 代理 模型 | 仿真 模型 | 代理 模型 | 仿真 模型 | 代理 模型 | 仿真 模型 | ||
| 冲击工况 | Str | 75.65 | 73.19 | 70.20 | 87.27 | 93.81 | 82.50 |
| Dis | 2.28 | 2.26 | 2.00 | 2.39 | 1.92 | 2.51 | |
| 制动工况 | Str | 62.84 | 60.02 | 58.04 | 59.84 | 73.47 | 69.59 |
| Dis | 1.71 | 1.71 | 1.56 | 1.87 | 1.66 | 1.94 | |
| 转弯工况 | Str | 62.84 | 59.59 | 60.33 | 59.32 | 71.65 | 69.28 |
| Dis | 1.69 | 1.69 | 1.42 | 1.84 | 1.46 | 1.90 | |
| 弯曲工况 | Str | 73.36 | 66.06 | 61.57 | 65.61 | 76.44 | 75.32 |
| Dis | 2.03 | 2.01 | 1.80 | 2.15 | 2.04 | 2.27 | |
| 扭转1轮 | Str | 105.83 | 90.63 | 91.22 | 101.24 | 97.81 | 102.84 |
| 工况 | Dis | 3.14 | 3.22 | 3.76 | 3.27 | 3.05 | 3.60 |
| 扭转2轮 | Str | 125.83 | 121.06 | 102.41 | 118.58 | 149.44 | 143.40 |
| 工况 | Dis | 3.92 | 3.93 | 3.89 | 3.90 | 4.01 | 4.81 |
| 射击工况 | Str | 66.76 | 68.44 | 68.67 | 67.75 | 90.39 | 78.45 |
| Dis | 2.01 | 2.01 | 1.90 | 2.15 | 1.47 | 2.24 | |
| 优化目标 | Mass | 445.45 | 445.44 | 486.88 | 485.46 | 380.93 | 379.60 |
Table 9 Comparison of surrogate model prediction and simulation model evaluation
| 工况类型及 优化目标 | RDS-GP | GP | ANN | ||||
|---|---|---|---|---|---|---|---|
| 代理 模型 | 仿真 模型 | 代理 模型 | 仿真 模型 | 代理 模型 | 仿真 模型 | ||
| 冲击工况 | Str | 75.65 | 73.19 | 70.20 | 87.27 | 93.81 | 82.50 |
| Dis | 2.28 | 2.26 | 2.00 | 2.39 | 1.92 | 2.51 | |
| 制动工况 | Str | 62.84 | 60.02 | 58.04 | 59.84 | 73.47 | 69.59 |
| Dis | 1.71 | 1.71 | 1.56 | 1.87 | 1.66 | 1.94 | |
| 转弯工况 | Str | 62.84 | 59.59 | 60.33 | 59.32 | 71.65 | 69.28 |
| Dis | 1.69 | 1.69 | 1.42 | 1.84 | 1.46 | 1.90 | |
| 弯曲工况 | Str | 73.36 | 66.06 | 61.57 | 65.61 | 76.44 | 75.32 |
| Dis | 2.03 | 2.01 | 1.80 | 2.15 | 2.04 | 2.27 | |
| 扭转1轮 | Str | 105.83 | 90.63 | 91.22 | 101.24 | 97.81 | 102.84 |
| 工况 | Dis | 3.14 | 3.22 | 3.76 | 3.27 | 3.05 | 3.60 |
| 扭转2轮 | Str | 125.83 | 121.06 | 102.41 | 118.58 | 149.44 | 143.40 |
| 工况 | Dis | 3.92 | 3.93 | 3.89 | 3.90 | 4.01 | 4.81 |
| 射击工况 | Str | 66.76 | 68.44 | 68.67 | 67.75 | 90.39 | 78.45 |
| Dis | 2.01 | 2.01 | 1.90 | 2.15 | 1.47 | 2.24 | |
| 优化目标 | Mass | 445.45 | 445.44 | 486.88 | 485.46 | 380.93 | 379.60 |
| 参数变量及 优化目标 | RDS-GP | GP | ||
|---|---|---|---|---|
| 最优方案 均值 | 最优方案 方差 | 最优方案 均值 | 最优方案 方差 | |
| L | 3620.00 | 0.00 | 3635.61 | 1764.81 |
| W | 1300.00 | 0.00 | 1336.01 | 1135.66 |
| H | 620.00 | 0.00 | 708.92 | 691.78 |
| L1 | 60.00 | 0.00 | 64.53 | 5.13 |
| W1 | 51.32 | 1.10 | 48.76 | 1.29 |
| L2 | 51.32 | 1.10 | 48.76 | 1.29 |
| W2 | 36.77 | 0.13 | 39.29 | 0.14 |
| L3 | 36.77 | 0.13 | 39.29 | 0.14 |
| W3 | 15.85 | 3.93 | 14.01 | 2.53 |
| T | 5.00 | 0 | 5.14 | 0.07 |
| M | 碳素钢 | 碳素钢 | 碳素钢 | 碳素钢 |
| Mass | 446.35 | 489.78 | ||
Table 10 Statistical comparison of optimal schemes
| 参数变量及 优化目标 | RDS-GP | GP | ||
|---|---|---|---|---|
| 最优方案 均值 | 最优方案 方差 | 最优方案 均值 | 最优方案 方差 | |
| L | 3620.00 | 0.00 | 3635.61 | 1764.81 |
| W | 1300.00 | 0.00 | 1336.01 | 1135.66 |
| H | 620.00 | 0.00 | 708.92 | 691.78 |
| L1 | 60.00 | 0.00 | 64.53 | 5.13 |
| W1 | 51.32 | 1.10 | 48.76 | 1.29 |
| L2 | 51.32 | 1.10 | 48.76 | 1.29 |
| W2 | 36.77 | 0.13 | 39.29 | 0.14 |
| L3 | 36.77 | 0.13 | 39.29 | 0.14 |
| W3 | 15.85 | 3.93 | 14.01 | 2.53 |
| T | 5.00 | 0 | 5.14 | 0.07 |
| M | 碳素钢 | 碳素钢 | 碳素钢 | 碳素钢 |
| Mass | 446.35 | 489.78 | ||

Fig.10 Comparison of iteration times
| 工况类型 | 最大应力/MPa | 最大位移/mm |
|---|---|---|
| 冲击工况 | 71.78 | 2.25 |
| 制动工况 | 58.90 | 1.70 |
| 转弯工况 | 58.46 | 1.68 |
| 弯曲工况 | 64.80 | 2.00 |
| 扭转1轮工况 | 89.94 | 3.20 |
| 扭转2轮工况 | 120.66 | 3.91 |
| 射击工况 | 67.15 | 2.00 |
Table 11 Static simulation check of truss body structure
| 工况类型 | 最大应力/MPa | 最大位移/mm |
|---|---|---|
| 冲击工况 | 71.78 | 2.25 |
| 制动工况 | 58.90 | 1.70 |
| 转弯工况 | 58.46 | 1.68 |
| 弯曲工况 | 64.80 | 2.00 |
| 扭转1轮工况 | 89.94 | 3.20 |
| 扭转2轮工况 | 120.66 | 3.91 |
| 射击工况 | 67.15 | 2.00 |

Fig.11 Static simulation analysis of truss body structure (46×)
| 阶数 | 固有频率/Hz |
|---|---|
| 1 | 37.24 |
| 2 | 60.29 |
| 3 | 61.42 |
| 4 | 71.13 |
| 5 | 81.35 |
| 6 | 89.39 |
| 7 | 91.34 |
| 8 | 95.58 |
| 9 | 99.59 |
| 10 | 102.99 |
Table 12 Dynamic simulation check of truss body structure
| 阶数 | 固有频率/Hz |
|---|---|
| 1 | 37.24 |
| 2 | 60.29 |
| 3 | 61.42 |
| 4 | 71.13 |
| 5 | 81.35 |
| 6 | 89.39 |
| 7 | 91.34 |
| 8 | 95.58 |
| 9 | 99.59 |
| 10 | 102.99 |

Fig.12 Modal simulation analysis of truss body structure (20×)
| [1] |
doi: 10.18494/SAM4018 URL |
| [2] |
张峰, 程建勇, 董立强, 等. 基于SFECONCEPT的某平台改款车型车身结构轻量化设计[J]. 机械设计, 2022, 39(11):106-111.
|
|
|
|
| [3] |
|
| [4] |
doi: 10.1016/j.compstruc.2009.07.008 URL |
| [5] |
|
| [6] |
王显会, 许刚, 李守成, 等. 特种车辆车架结构拓扑优化设计研究[J]. 兵工学报, 2007, 28(8):903-908.
|
|
|
|
| [7] |
doi: 10.1080/0305215X.2018.1506770 URL |
| [8] |
doi: 10.1007/s00158-019-02410-8 |
| [9] |
|
| [10] |
doi: 10.1016/j.ymssp.2019.106405 URL |
| [11] |
温晶晶, 吴斌, 刘承骛. 导弹整体式翼面骨架结构的拓扑优化设计[J]. 兵工学报, 2017, 38(1):81-88.
doi: 10.3969/j.issn.1000-1093.2017.01.011 |
|
|
|
| [12] |
|
| [13] |
闫闯. 基于局部拓扑优化技术的纯电动汽车车架轻量化研究[D]. 成都: 电子科技大学, 2019:6-16.
|
|
|
|
| [14] |
扶原放, 金达锋, 乔蔚炜. 多工况下微型电动车车身结构拓扑优化设计[J]. 机械设计, 2010(2):77-80.
|
|
|
|
| [15] |
兰凤崇, 赖番结, 陈吉清, 等. 考虑动态特性的多工况车身结构拓扑优化研究[J]. 机械工程学报, 2014, 50(20):122-128.
doi: 10.3901/JME.2014.20.122 |
|
doi: 10.3901/JME.2014.20.122 |
|
| [16] |
邹坤, 侯亮, 卜祥建, 等. 基于工况风险评估的叉车门架多工况拓扑优化[J]. 中国机械工程, 2019, 30(5):568-576,577.
|
|
|
|
| [17] |
|
| [18] |
doi: 10.1016/j.eswa.2021.116104 URL |
| [19] |
doi: 10.1016/j.aei.2020.101123 URL |
| [20] |
doi: 10.1016/j.enganabound.2022.08.001 URL |
| [21] |
谢然, 兰凤崇, 陈吉清, 等. 满足可靠性要求的轻量化车身结构多目标优化方法[J]. 机械工程学报, 2011, 47(4):117-124.
|
|
|
|
| [22] |
史国宏, 陈勇, 杨雨泽, 等. 白车身多学科轻量化优化设计应用[J]. 机械工程学报, 2012, 48(8):110-114.
|
|
|
|
| [23] |
doi: 10.1007/s00158-020-02674-5 |
| [24] |
doi: 10.1007/s00158-017-1778-1 URL |
| [25] |
doi: 10.1039/d0ra03031g pmid: 35517747 |
| [1] | XIONG Guangming, LUO Zhen, SUN Dong, TAO Junfeng, TANG Zeyue, WU Chao. Object Detection and Tracking for Unmanned Vehicles Based on Fusion of Infrared Camera and MMW Radar in Smoke-obscured Environment [J]. Acta Armamentarii, 2024, 45(3): 893-906. |
| [2] | HE Qiang, LIU Hougang, ZOU Bo, LÜ Bu, CHEN Xulin, DUAN Yu. Selection and Parameter Optimization of Hybrid Energy Storage System for Intelligent Unmanned Vehicles [J]. Acta Armamentarii, 2023, 44(9): 2791-2801. |
| [3] | ZHAO Xiaodong, ZHANG Xunying. Optimization Algorithm of Autonomous Target Recognition for Unmanned Vehicles Based on YOLOv5 [J]. Acta Armamentarii, 2023, 44(9): 2732-2744. |
| [4] | ZHANG Ning, SHI Jinguang, WANG Zhongyuan, ZHAO Xinxin. Performance Prediction and Optimization of Ramjet for Projectiles Using Support Vector Regression Model [J]. Acta Armamentarii, 2023, 44(10): 2944-2953. |
| [5] | SONG Jiarui, TAO Gang, LI Derun, ZANG Zheng, WU Shaobin, GONG Jianwei. Robust Model Predictive Control for Manned and Unmanned Vehicle Formation Based on Parameter Self-Optimization [J]. Acta Armamentarii, 2023, 44(1): 84-97. |
| [6] | ZHANG Faping, ZHANG Shuchang, WU Kai, ZHANG Yunhe, YAN Yan. Dynamics Parameter Optimization for Tracked Vehicle Based on Surrogate Model Evolution [J]. Acta Armamentarii, 2023, 44(1): 27-39. |
| [7] | KONG Guojie, FENG Shi, YU Huilong, JU Zhiyang, GONG Jianwei. A Review on Cooperative Motion Planning of Unmanned Vehicles [J]. Acta Armamentarii, 2023, 44(1): 11-26. |
| [8] | ZHU Da-lin, TANG Sheng-jing, GUO Jie, GAO Feng. Optimum Design for Solid Rocket Motors Based on Individual Discipline Feasible Strategy [J]. Acta Armamentarii, 2012, 33(8): 897-901. |
| [9] | ZHAO Jia-peng,ZHANG Yun-hai,REN Chong. The Torpedo Shape Multidisciplinary Design Optimization Methods for Low-dragLow-noise and High-maneuverability [J]. Acta Armamentarii, 2012, 33(2): 186-191. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||