
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (9): 2685-2696.doi: 10.12382/bgxb.2022.0525
Special Issue: 智能系统与装备技术
Previous Articles Next Articles
ZHAO Junmin1,2, HE Haozhe2,*( ), WANG Shaoqi2, NIE Cong2, JIAO Yingjie2
), WANG Shaoqi2, NIE Cong2, JIAO Yingjie2
Received:2022-06-13
Online:2022-09-27
Contact:
HE Haozhe
CLC Number:
ZHAO Junmin, HE Haozhe, WANG Shaoqi, NIE Cong, JIAO Yingjie. Joint Trajectory Planning for Multiple UAVs Target Tracking and Obstacle Avoidance in a Complicated Environment[J]. Acta Armamentarii, 2023, 44(9): 2685-2696.
Add to citation manager EndNote|Ris|BibTeX
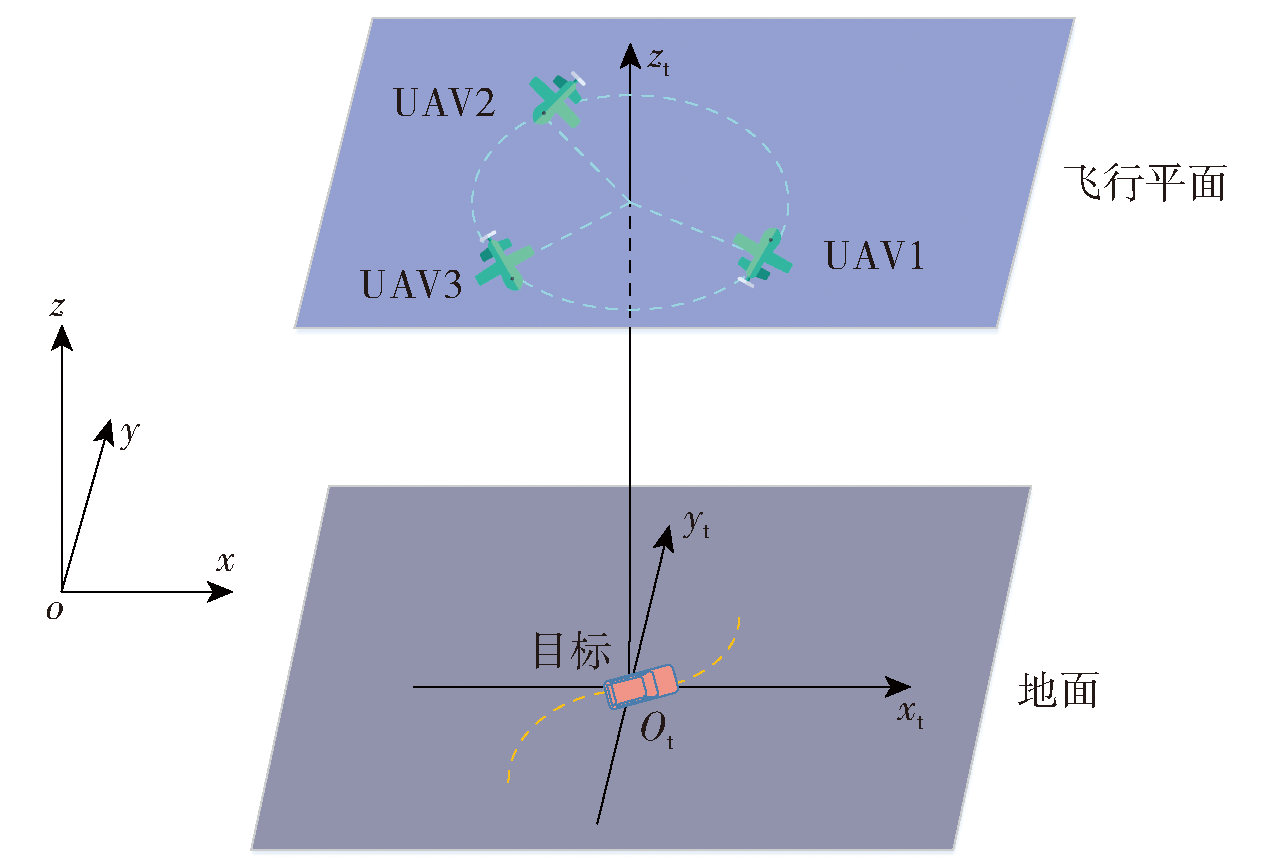
Fig.1 Schematic diagram of standoff tracking of multiple UAVs
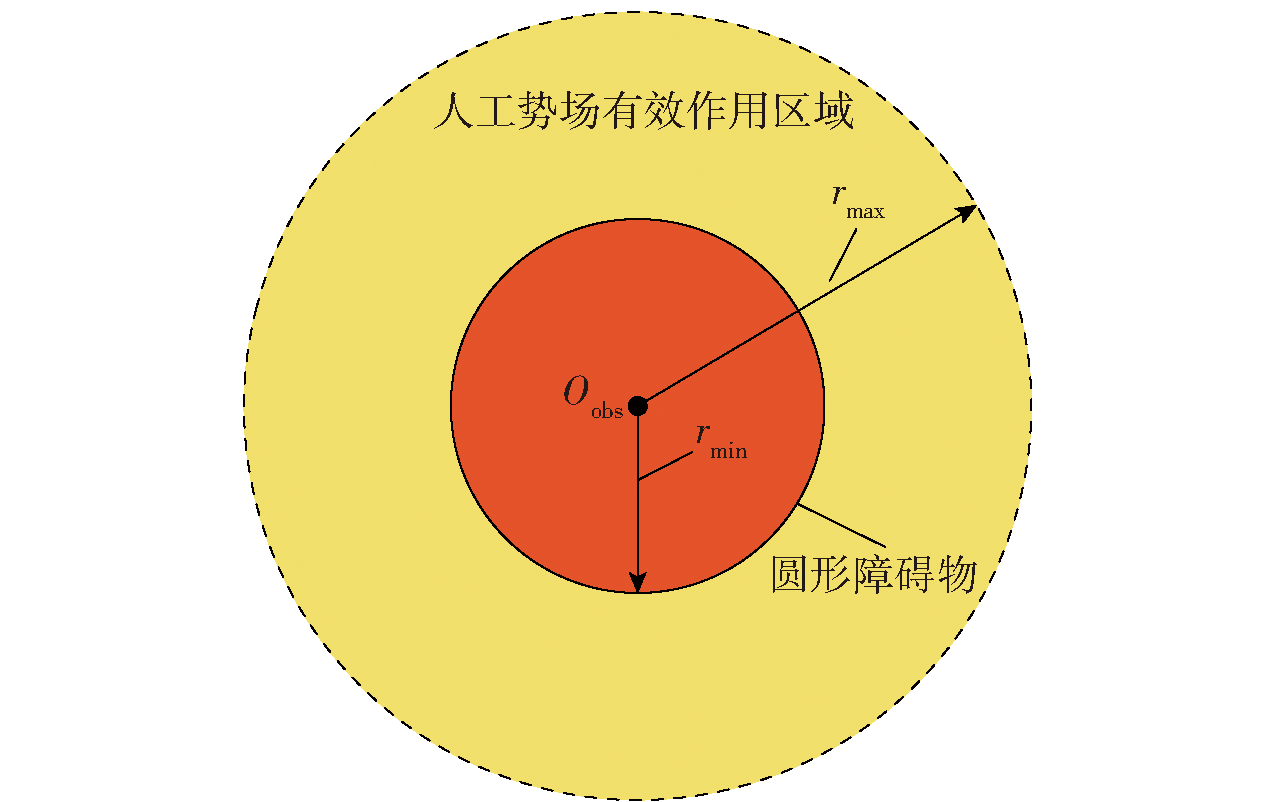
Fig.2 Schematic diagram of an obstacle and its artificial potential
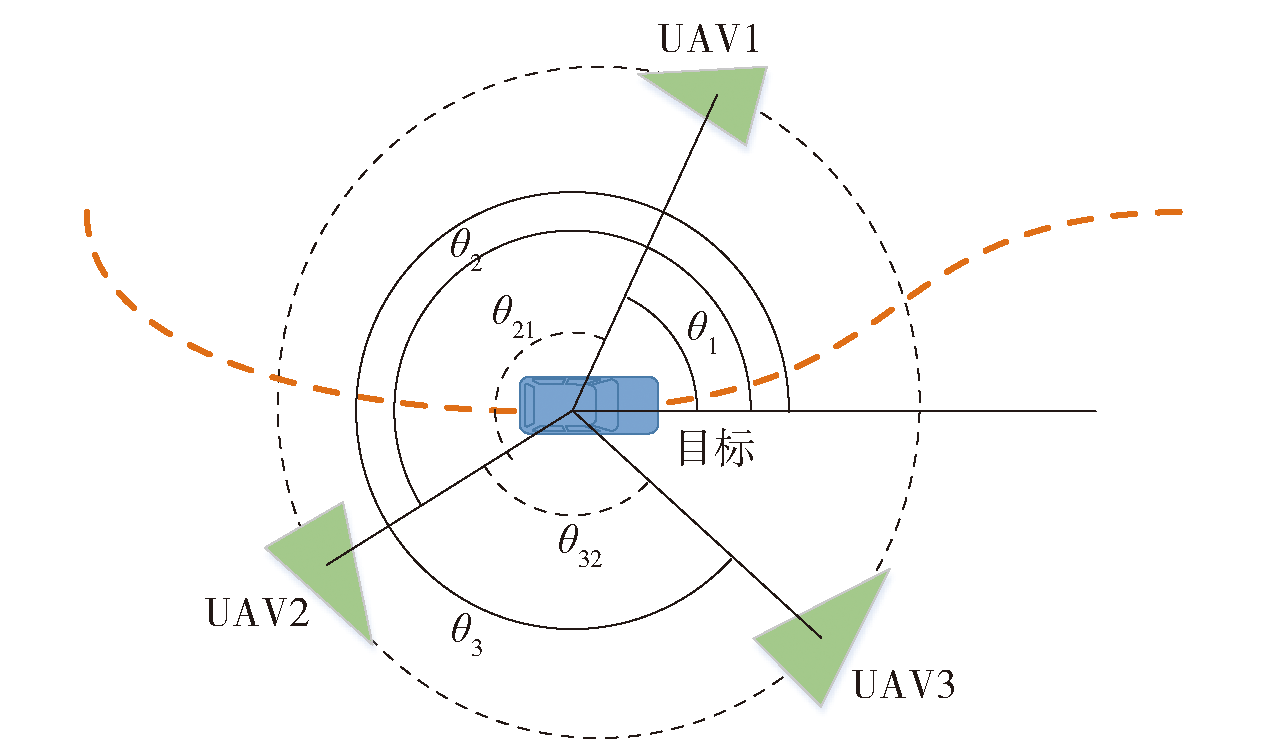
Fig.3 Phase relationship between UAVs on a standoff circle
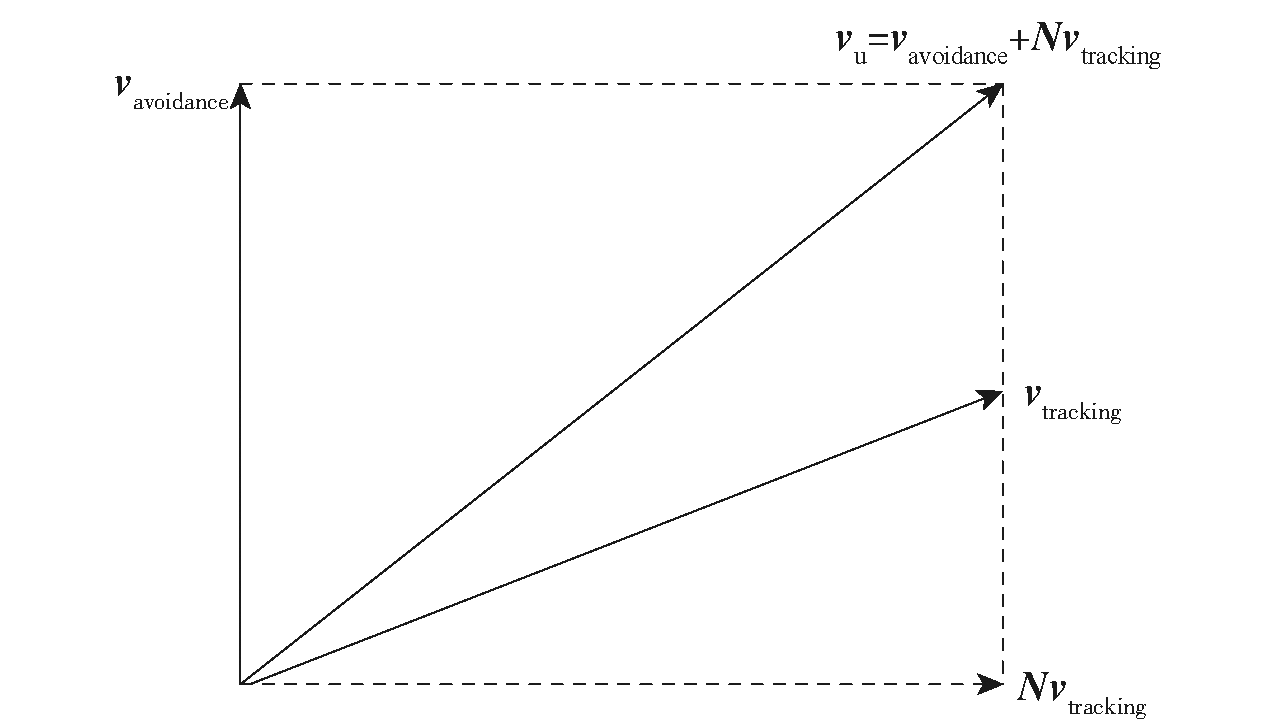
Fig.4 Schematic diagram of null-space-based joint trajectory planning
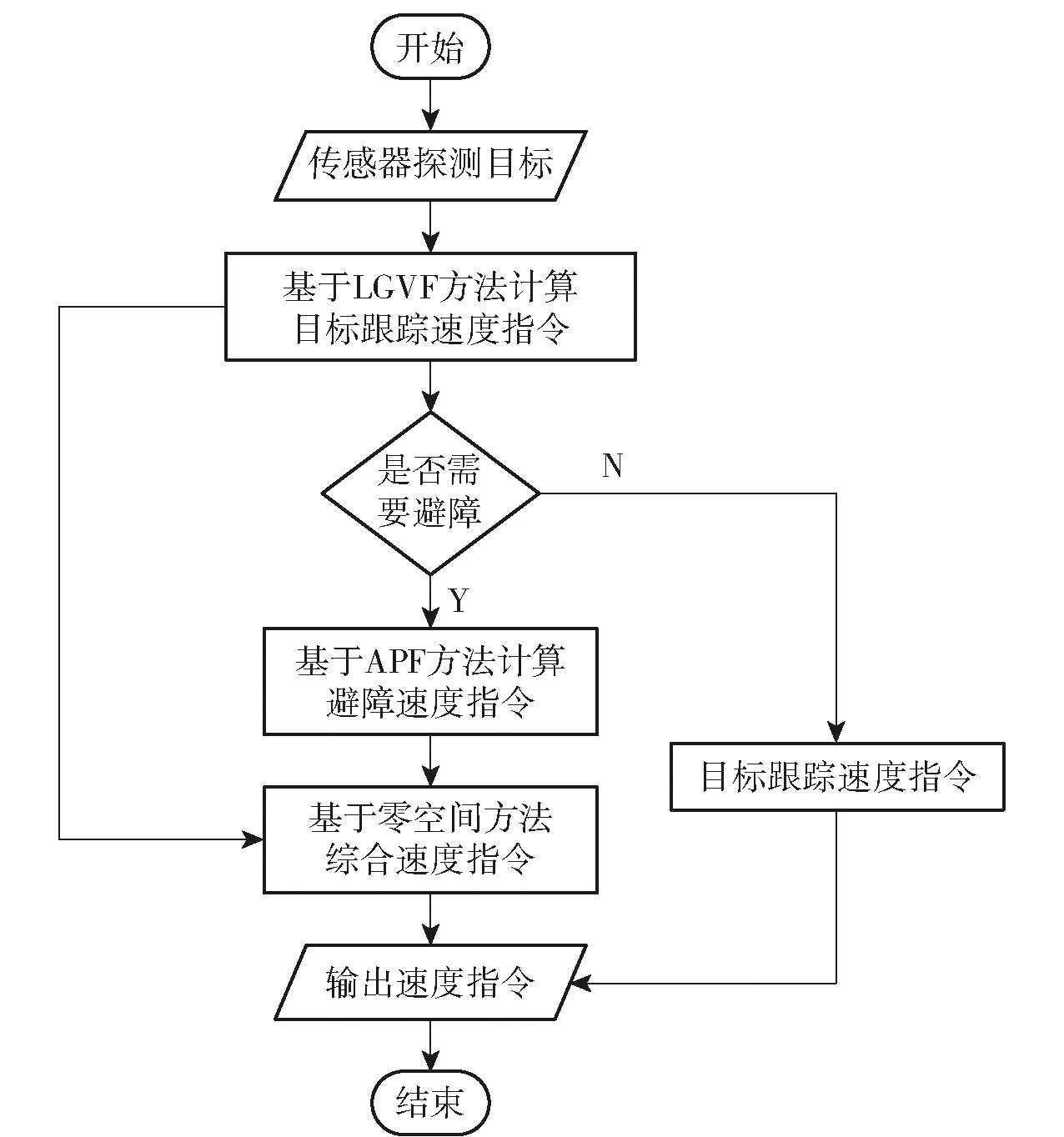
Fig.5 Schematic diagram of UAV trajectory planning process
| UAV编号 | UAV1 | UAV2 | UAV3 |
|---|---|---|---|
| 初始位置/m | (750,800) | (700,700) | (600,600) |
Table 1 Initial positions of UAVs
| UAV编号 | UAV1 | UAV2 | UAV3 |
|---|---|---|---|
| 初始位置/m | (750,800) | (700,700) | (600,600) |
| 参数 | R/m | v0/(m·s-1) | k1 | k3 |
|---|---|---|---|---|
| 数值 | 300 | 20 | 1/75π | 1/75π |
Table 2 LGVF method parameters
| 参数 | R/m | v0/(m·s-1) | k1 | k3 |
|---|---|---|---|---|
| 数值 | 300 | 20 | 1/75π | 1/75π |
| 障碍物编号 | 障碍物1 | 障碍物2 | 障碍物3 |
|---|---|---|---|
| 位置/m | (330,550) | (250,270) | (50,400) |
Table 3 Positions of obstacles
| 障碍物编号 | 障碍物1 | 障碍物2 | 障碍物3 |
|---|---|---|---|
| 位置/m | (330,550) | (250,270) | (50,400) |
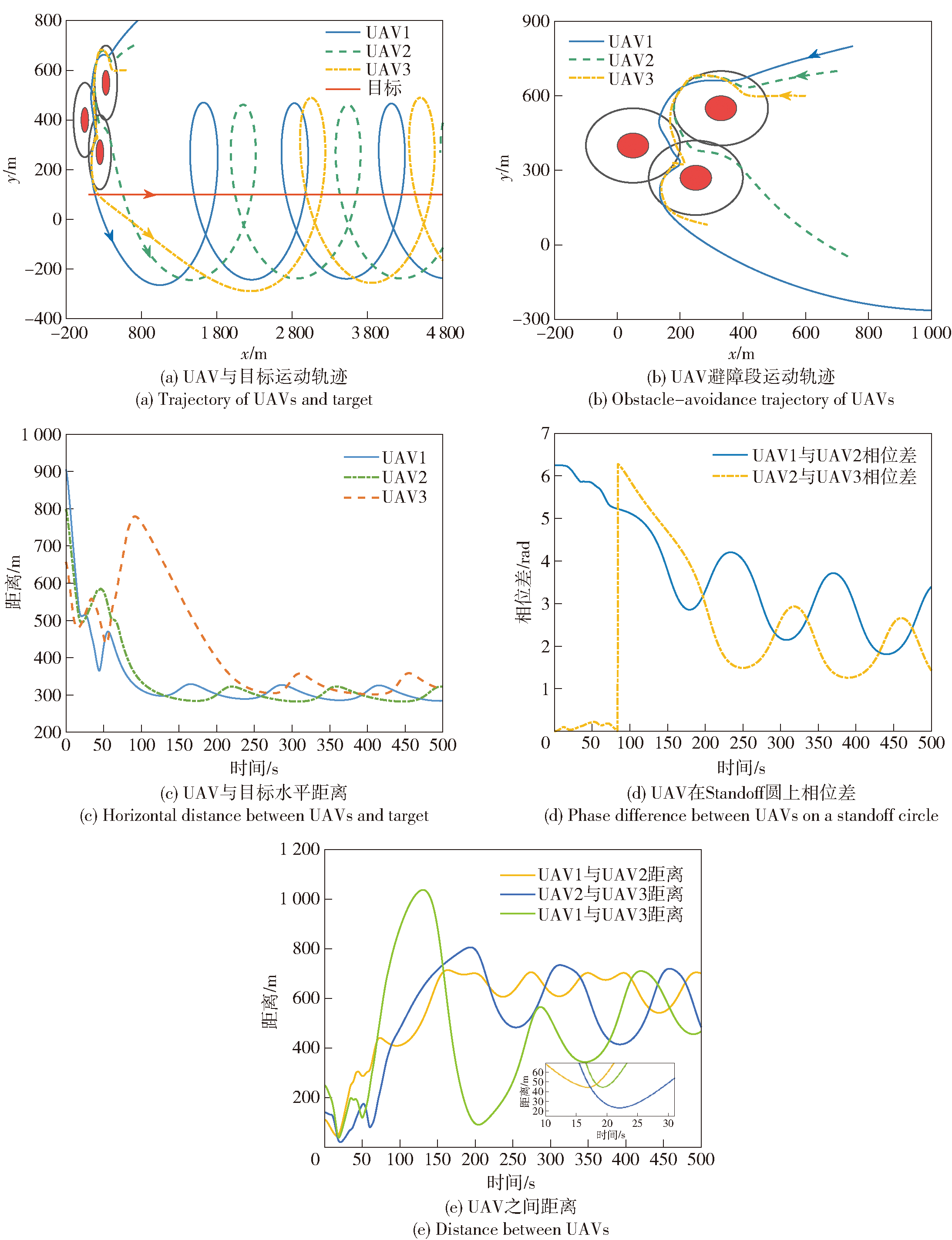
Fig.6 Simulation results of cooperative tracking of a non-maneuvering target
| 时间/s | 运动形式 | 速度/ (m·s-1) | 角速度/ ((°) s-1) |
|---|---|---|---|
| 0~260 | 沿x轴正向做匀速直线运动 | 10 | 0 |
| 260~280 | 沿逆时针方向做匀速转弯运动 | 10 | 4.5 |
| 280~330 | 沿y轴正向做匀速直线运动 | 10 | 0 |
| 330~350 | 沿顺时针方向做匀速转弯运动 | 10 | -4.5 |
| 350~800 | 沿x轴正向做匀速直线运动 | 10 | 0 |
Table 4 Motion process of a maneuvering target
| 时间/s | 运动形式 | 速度/ (m·s-1) | 角速度/ ((°) s-1) |
|---|---|---|---|
| 0~260 | 沿x轴正向做匀速直线运动 | 10 | 0 |
| 260~280 | 沿逆时针方向做匀速转弯运动 | 10 | 4.5 |
| 280~330 | 沿y轴正向做匀速直线运动 | 10 | 0 |
| 330~350 | 沿顺时针方向做匀速转弯运动 | 10 | -4.5 |
| 350~800 | 沿x轴正向做匀速直线运动 | 10 | 0 |
| 障碍物编号 | 位置/m | rmin/m | rmax/m |
|---|---|---|---|
| 障碍物4 | (1180,-200) | 50 | 150 |
| 障碍物5 | (1400,-150) | 50 | 150 |
| 障碍物6 | (1630,-90) | 80 | 160 |
| 障碍物7 | (3050, 0) | 80 | 160 |
| 障碍物8 | (3050, 290) | 80 | 160 |
Table 5 Positions and parameters of other obstacles
| 障碍物编号 | 位置/m | rmin/m | rmax/m |
|---|---|---|---|
| 障碍物4 | (1180,-200) | 50 | 150 |
| 障碍物5 | (1400,-150) | 50 | 150 |
| 障碍物6 | (1630,-90) | 80 | 160 |
| 障碍物7 | (3050, 0) | 80 | 160 |
| 障碍物8 | (3050, 290) | 80 | 160 |
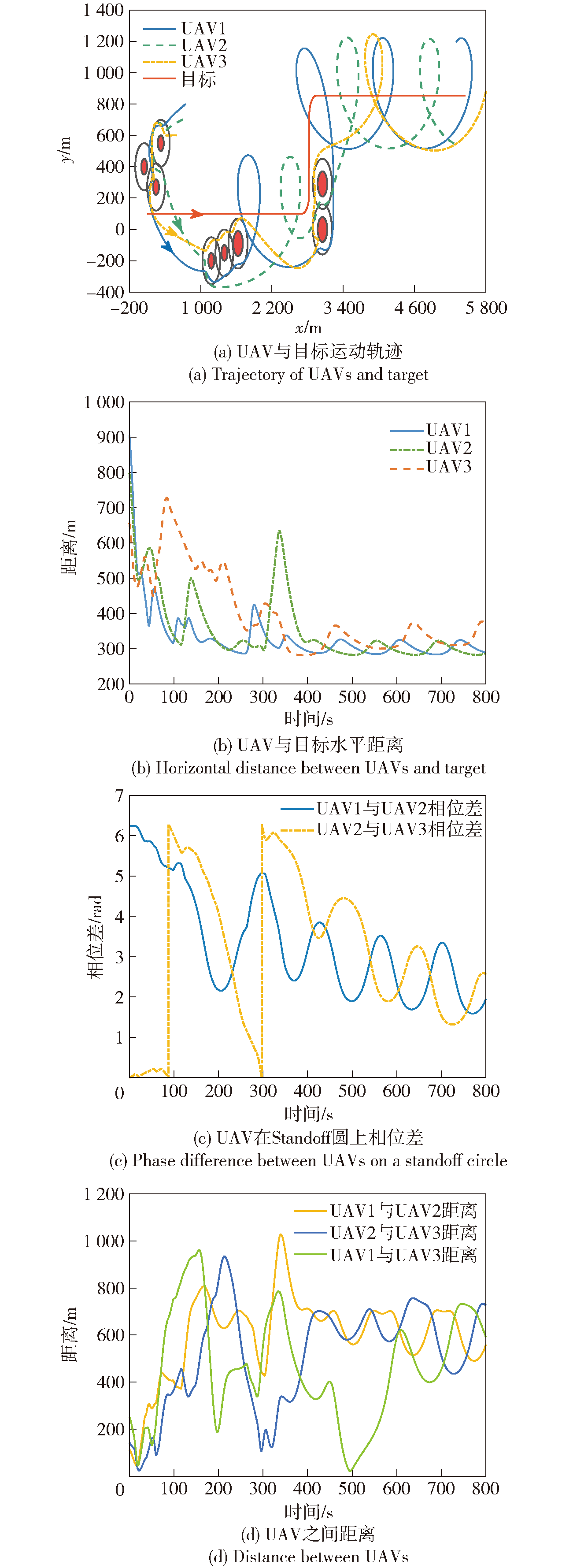
Fig.7 Simulation results of cooperative tracking of a maneuvering target
| UAV编号 | rmin/m | ||
|---|---|---|---|
| 80 | 100 | 150 | |
| UAV1 | 123.5743 | 126.6565 | 153.7342 |
| UAV2 | 146.1178 | 146.6368 | 156.5215 |
| UAV3 | 93.7131 | 107.9902 | 152.0367 |
Table 6 Minimum distance between each UAV and the center of obstacle 7 with different radius of obstacle 7 m
| UAV编号 | rmin/m | ||
|---|---|---|---|
| 80 | 100 | 150 | |
| UAV1 | 123.5743 | 126.6565 | 153.7342 |
| UAV2 | 146.1178 | 146.6368 | 156.5215 |
| UAV3 | 93.7131 | 107.9902 | 152.0367 |
| UAV编号 | rmin/m | ||
|---|---|---|---|
| 80 | 100 | 150 | |
| UAV1 | 162.0321 | 163.5365 | 170.7342 |
| UAV2 | 118.7405 | 122.8926 | 153.7433 |
| UAV3 | 129.6581 | 133.1933 | 153.5743 |
Table 7 Minimum distance between each UAV and the center of obstacle 8 with different radius of obstacle 8 m
| UAV编号 | rmin/m | ||
|---|---|---|---|
| 80 | 100 | 150 | |
| UAV1 | 162.0321 | 163.5365 | 170.7342 |
| UAV2 | 118.7405 | 122.8926 | 153.7433 |
| UAV3 | 129.6581 | 133.1933 | 153.5743 |
| UAV编号 | rmax/m | ||
|---|---|---|---|
| 160 | 220 | 300 | |
| UAV1 | 125.5743 | 173.6564 | 248.1498 |
| UAV2 | 146.1178 | 184.1363 | 249.3040 |
| UAV3 | 93.7131 | 128.3524 | 203.1966 |
Table 8 Minimum distance between each UAV and the center of obstacle 7 with different APF maximum radius m
| UAV编号 | rmax/m | ||
|---|---|---|---|
| 160 | 220 | 300 | |
| UAV1 | 125.5743 | 173.6564 | 248.1498 |
| UAV2 | 146.1178 | 184.1363 | 249.3040 |
| UAV3 | 93.7131 | 128.3524 | 203.1966 |
| UAV编号 | rmax/m | ||
|---|---|---|---|
| 160 | 220 | 300 | |
| UAV1 | 162.0321 | 224.1401 | 303.2632 |
| UAV2 | 118.7405 | 146.4538 | 230.6955 |
| UAV3 | 129.6581 | 153.9718 | 226.0562 |
Table 9 Minimum distance between each UAV and the center of obstacle 8 with different APF maximum radius m
| UAV编号 | rmax/m | ||
|---|---|---|---|
| 160 | 220 | 300 | |
| UAV1 | 162.0321 | 224.1401 | 303.2632 |
| UAV2 | 118.7405 | 146.4538 | 230.6955 |
| UAV3 | 129.6581 | 153.9718 | 226.0562 |
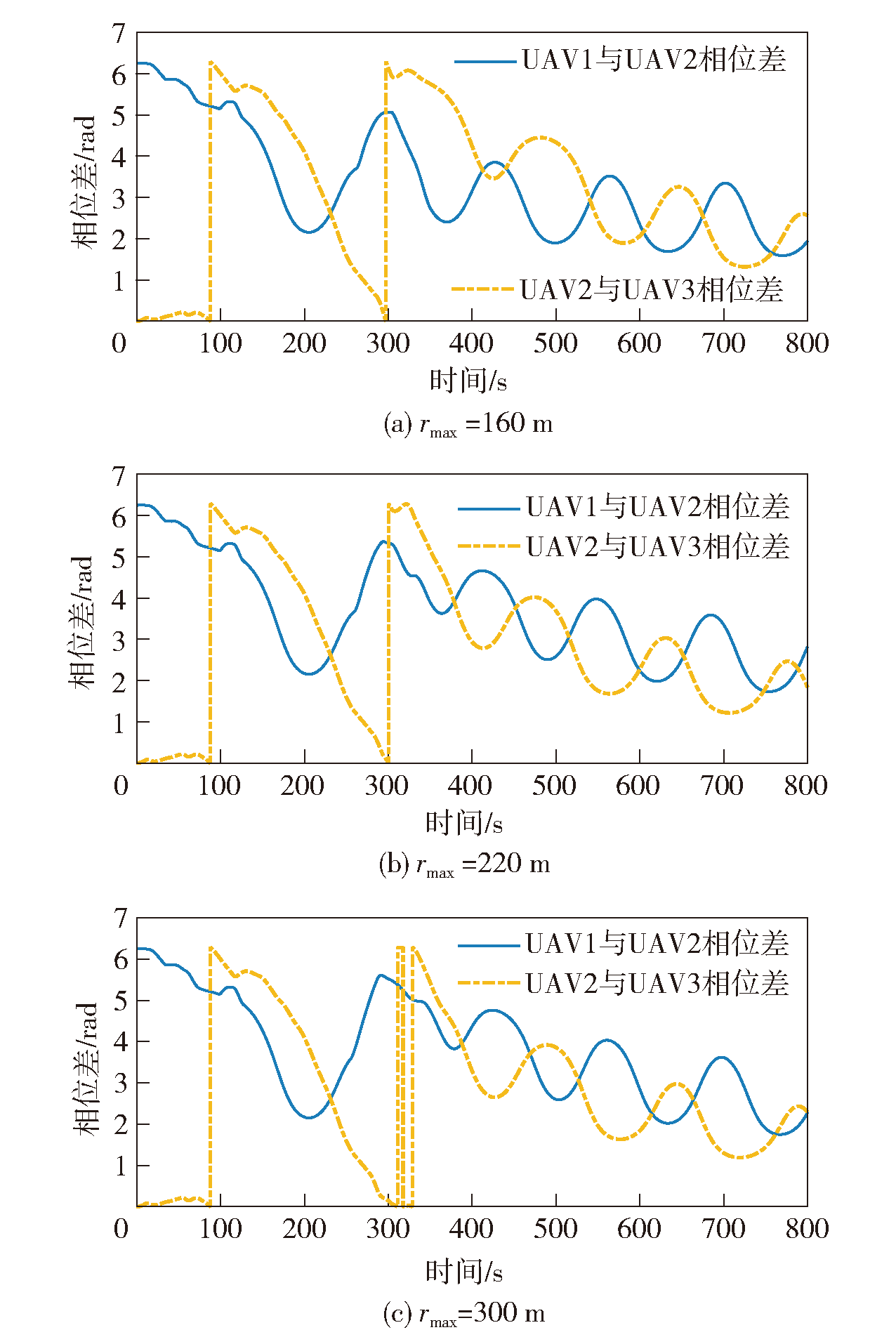
Fig.8 Phase difference between UAVs on a standoff circle under different APF maximum radius

Fig.9 Simulation results using a adding-up method
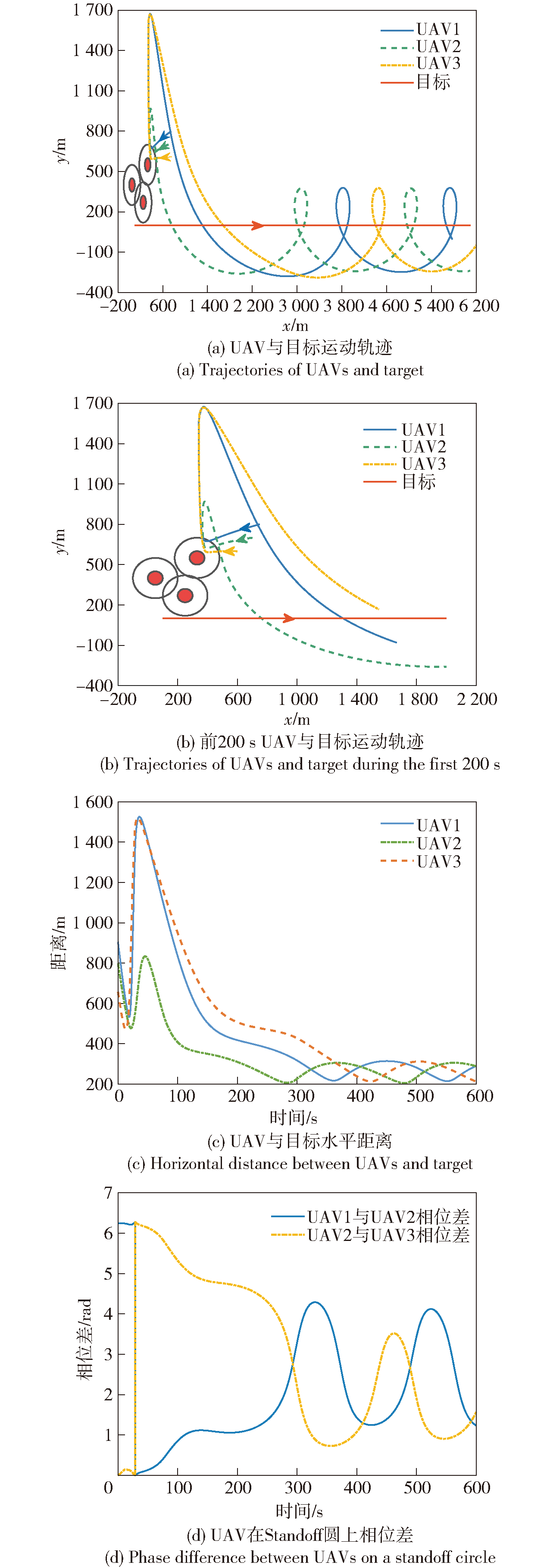
Fig.10 Simulation results using a interfered fluid method
| UAV | 零空间方法下 与障碍物最小 距离/m | 直接相加方法下 与障碍物最小 距离/m | 扰动流场方法下 与障碍物最小 距离/m |
|---|---|---|---|
| UAV1 | 73.919 | 73.624 | 126.462 |
| UAV2 | 108.069 | 54.895 | 86.388 |
| UAV3 | 63.409 | 61.594 | 69.446 |
Table 10 Minimum distance between each UAV and obstacles using three different methods
| UAV | 零空间方法下 与障碍物最小 距离/m | 直接相加方法下 与障碍物最小 距离/m | 扰动流场方法下 与障碍物最小 距离/m |
|---|---|---|---|
| UAV1 | 73.919 | 73.624 | 126.462 |
| UAV2 | 108.069 | 54.895 | 86.388 |
| UAV3 | 63.409 | 61.594 | 69.446 |
| [1] |
张云飞, 林德福, 郑多, 等. 多目标时空同步协同攻击无人机任务分配与轨迹优化[J]. 兵工学报, 2021, 42(7): 1482-1495.
|
|
doi: 10.3969/j.issn.1000-1093.2021.07.016 |
|
| [2] |
周健, 龚春林, 谷良贤, 等. 非匹配不确定性条件下的编队分布式协同控制[J]. 系统工程与电子技术, 2019, 41(3): 636-642.
|
|
|
|
| [3] |
邹汝平, 刘建书. 基于概率假设密度滤波与无迹Kalman滤波的多目标跟踪与识别[J]. 兵工学报, 2020, 41(8):1502-1508.
doi: 10.3969/j.issn.1000-1093.2020.08.004 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.004 |
|
| [4] |
张哲, 吴剑, 代冀阳, 等. 基于改进A*算法的多无人机协同战术规划[J]. 兵工学报, 2020, 41(12): 2530-2539.
doi: 10.3969/j.issn.1000-1093.2020.12.019 |
|
|
|
| [5] |
|
| [6] |
宗群, 王丹丹, 邵士凯, 等. 多无人机协同编队飞行控制研究现状及发展[J]. 哈尔滨工业大学学报, 2017, 49(3): 1-14.
|
|
|
|
| [7] |
韩月明, 方丹, 张红艳, 等. 无人机集群典型作战运用样式及关键技术分析[J]. 飞航导弹, 2020(9): 43-47.
|
|
|
|
| [8] |
doi: 10.1007/s12555-019-0625-0 |
| [9] |
|
| [10] |
doi: 10.1007/s11431-018-9449-9 |
| [11] |
|
| [12] |
吴健发, 王宏伦, 刘一恒, 等. 无人机避障航路规划方法研究综述[J]. 无人系统技术, 2020, 3(1):1-10.
|
|
|
|
| [13] |
doi: 10.1016/j.ast.2016.04.002 URL |
| [14] |
吴健发, 王宏伦, 王延祥, 等. 无人机反应式扰动流体路径规划[J]. 自动化学报, 2021, 47(12): 1-16.
|
|
|
|
| [15] |
邓伟栋, 唐大全, 唐管政. 无人机编队协同跟踪目标航迹规划[J]. 电光与控制, 2020, 27(9):43-49.
|
|
|
|
| [16] |
doi: 10.1007/s11370-007-0002-3 URL |
| [17] |
doi: 10.1016/j.isatra.2021.05.033 URL |
| [18] |
doi: 10.1109/TSMC.2021.3049681 URL |
| [19] |
|
| [20] |
doi: 10.1142/S2301385022500091 URL |
| [21] |
|
| [22] |
王林. 多无人机协同目标跟踪问题建模与优化技术研究[D]. 长沙: 国防科学技术大学, 2011.
|
|
|
|
| [23] |
|
| [24] |
朱旭. 基于信息一致性的多无人机编队控制方法研究[D]. 西安: 西北工业大学, 2016.
|
|
|
| [1] | YIN Qiulin, CHEN Qi, WANG Zhongyuan, WANG Qinghai. Rapid Trajectory Planning for Glide-guided Projectiles in Single-gun Multi-shot Scenarios Considering Time-spatial Coordination [J]. Acta Armamentarii, 2024, 45(3): 798-809. |
| [2] | YANG Jiaming, PAN Yue, WANG Qiang, CAO Huaigang, GAO Sunpei. Research on Deep Learning Method of Underwater Weak Target Tracking [J]. Acta Armamentarii, 2024, 45(2): 385-394. |
| [3] | MA Xiao, LI Xinqi, LIU Zhenyuan, DI Chao. A Fast Target Tracking Method Based on BACF [J]. Acta Armamentarii, 2024, 45(2): 497-503. |
| [4] | ZHOU Yue, LI Zhuangzhuang, ZHENG Ranshun, LI Jun. Research on Safe Separation Mechanism of UAV Rocket Booster [J]. Acta Armamentarii, 2024, 45(1): 219-230. |
| [5] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [6] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| [7] | LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare [J]. Acta Armamentarii, 2023, 44(S2): 146-156. |
| [8] | CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information [J]. Acta Armamentarii, 2023, 44(S2): 157-166. |
| [9] | LI Zenglin, LI Bo, BAI Shuangxia, MENG Bobo. UAV Autonomous Air Combat Decision-making Based on AM-SAC [J]. Acta Armamentarii, 2023, 44(9): 2849-2858. |
| [10] | CAO Yan, LONG Teng, SUN Jingliang, ZHOU Yuze. Distributed Task Allocation Algorithm for Multiple Unmanned Aerial Vehicle Based on Information Retransmission and Package Loss Compensation [J]. Acta Armamentarii, 2023, 44(9): 2697-2708. |
| [11] | YANG Jiaxiu, LI Xinkai, ZHANG Hongli, WANG Hao. Robust Tracking of Quadrotor UAVs Based on Integral Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(9): 2802-2813. |
| [12] | DU Hongbao, WANG Zhengjie, TANG Lixi, ZHANG Xiaoning. Control Barrier Function-based Control for Aircraft Avoidance and Guidance with Dynamic Obstacles [J]. Acta Armamentarii, 2023, 44(9): 2814-2823. |
| [13] | HAN Yu, SONG Tao, ZHENG Duo, LIU Xin. Unmanned Aerial Vehicle Cluster Cooperative Guidance Technology Based on Conflict Trigger Mechanism [J]. Acta Armamentarii, 2023, 44(7): 1881-1895. |
| [14] | ZHENG Lei, CHEN Zhimin, JIA Yuxuan. UAV Swarm Tracking Method Based on Wide-Area Deployment of Intelligent Reflecting Surfaces [J]. Acta Armamentarii, 2023, 44(6): 1837-1845. |
| [15] | ZHANG Kun, LIU Zekun, HUA Shuai, ZHANG Zhenchong, LI Ke, YU Jingting. Generation of Multi-UAV Four-dimensional Cooperative Attack Route Based on T/S-SAS [J]. Acta Armamentarii, 2023, 44(6): 1576-1587. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||