
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (11): 3498-3507.doi: 10.12382/bgxb.2022.0850
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
SHENG Hui1,2,*( ), XIANG Changle1, GAI Jiangtao2, YUAN Yi2, JIAN Hongchao2, ZHANG Nan2
), XIANG Changle1, GAI Jiangtao2, YUAN Yi2, JIAN Hongchao2, ZHANG Nan2
Received:2022-09-20
Online:2023-02-16
Contact:
SHENG Hui
CLC Number:
SHENG Hui, XIANG Changle, GAI Jiangtao, YUAN Yi, JIAN Hongchao, ZHANG Nan. Vehicle Safety Control of Tracked Vehicle Driven by Two-sided Motor Coupling under the Failure Mode of One-sided Motor[J]. Acta Armamentarii, 2023, 44(11): 3498-3507.
Add to citation manager EndNote|Ris|BibTeX
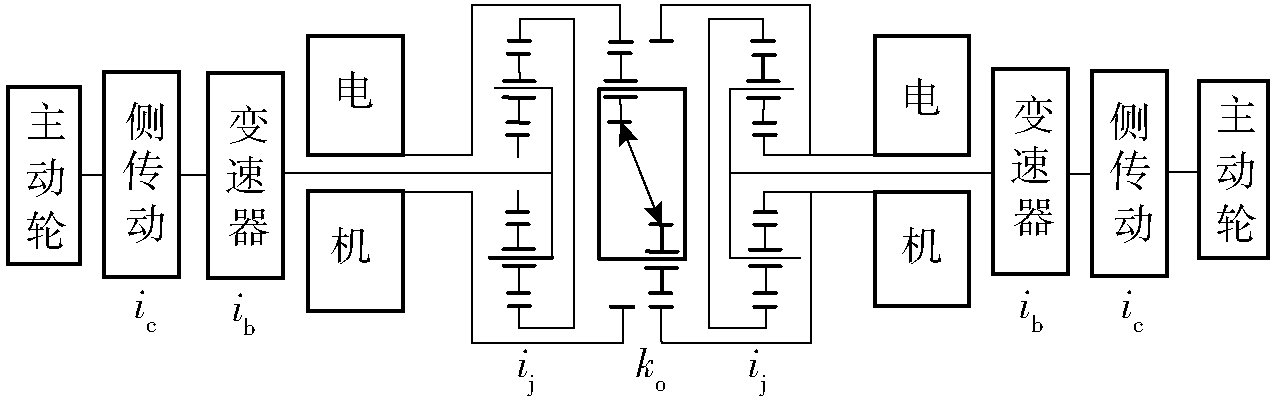
Fig.1 Schematic diagram of structure of two-sided motor coupling drive system

Fig.2 Statistics of time used

Fig.3 Simulation model
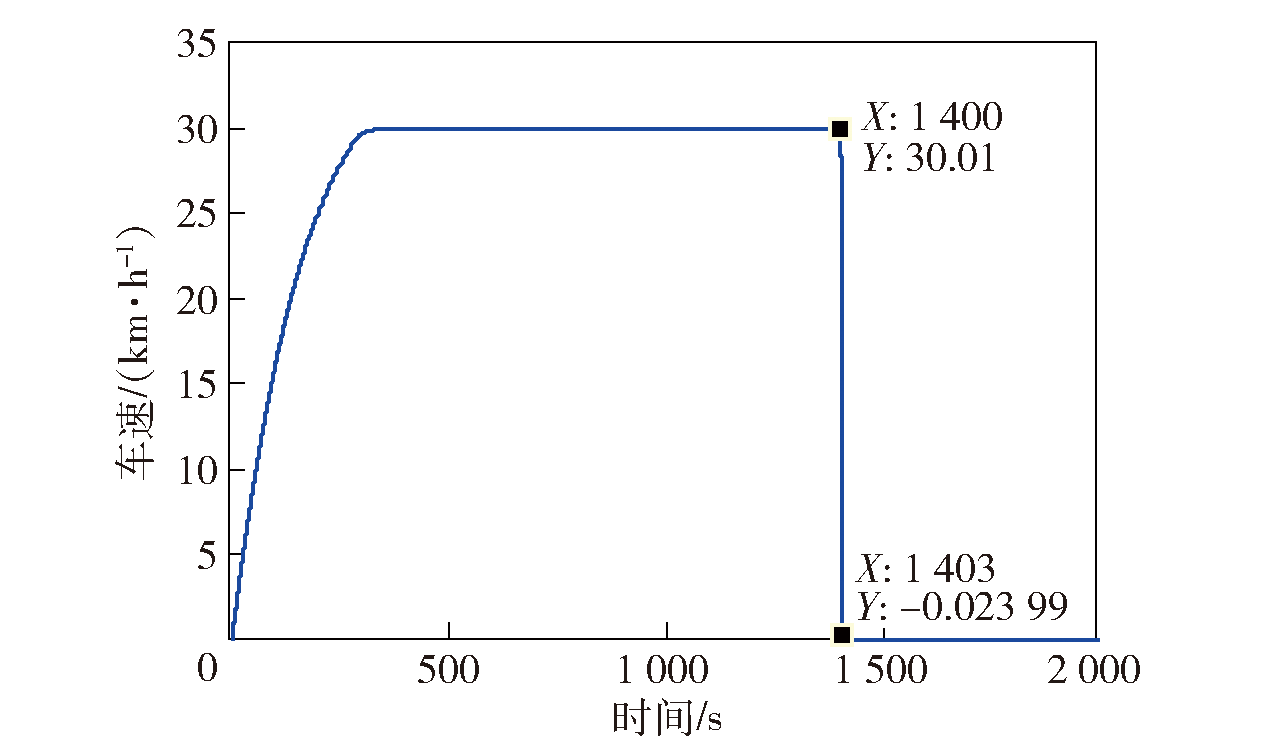
Fig.4 Speed curve of 30km/h
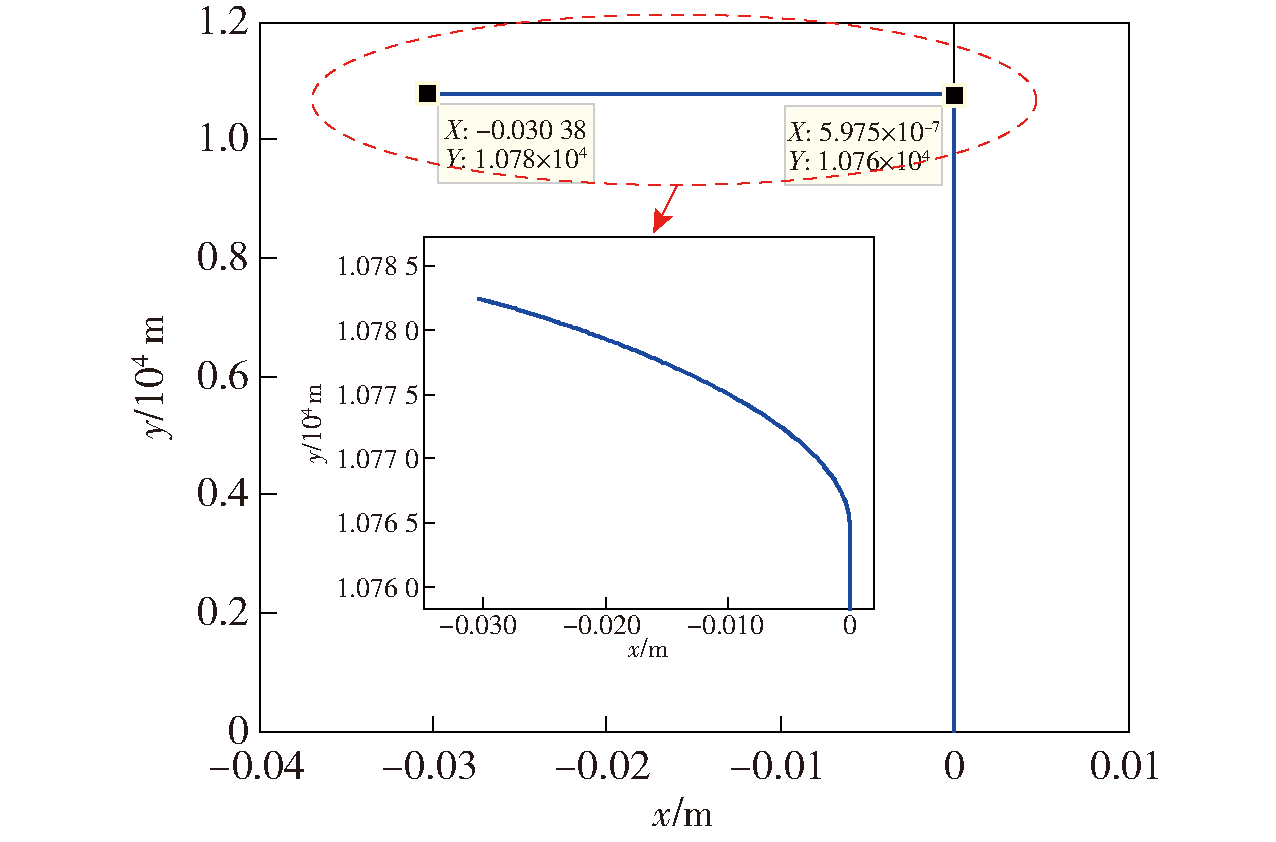
Fig.5 Running track curve of vehicle at 30km/h
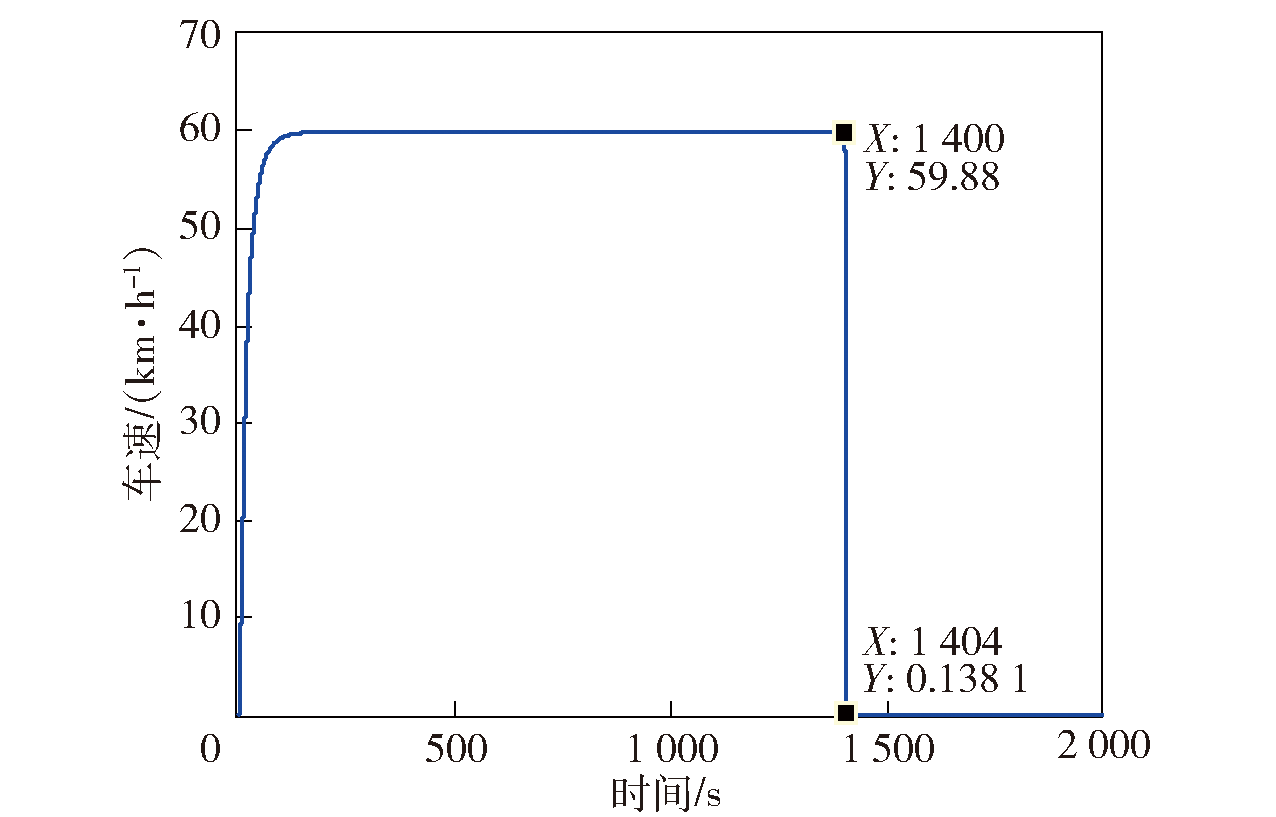
Fig.6 Speed curve of 60km/h
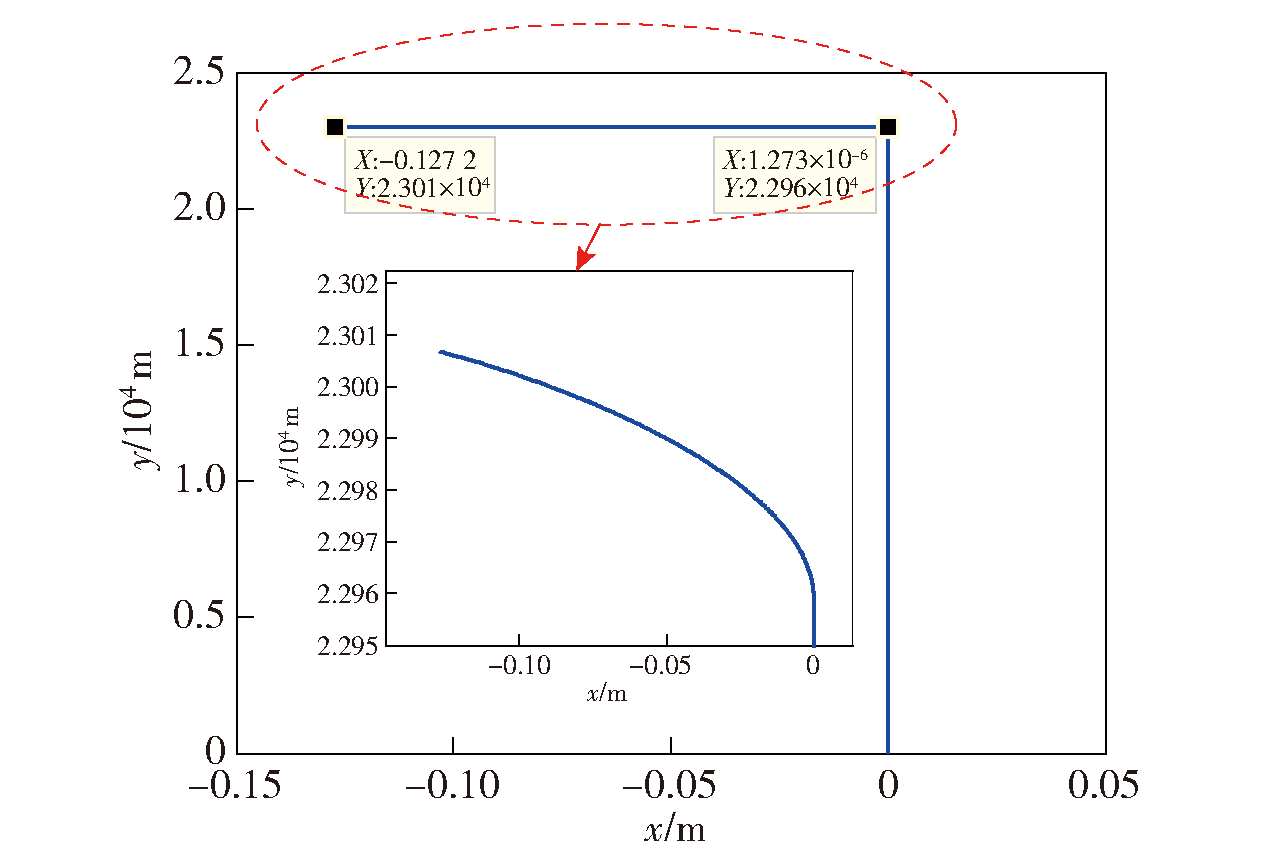
Fig.7 Running track curve of vehicke at 60km/h

Fig.8 Speed curve of 84km/h

Fig.9 Running track curve of vehicle at 84km/h
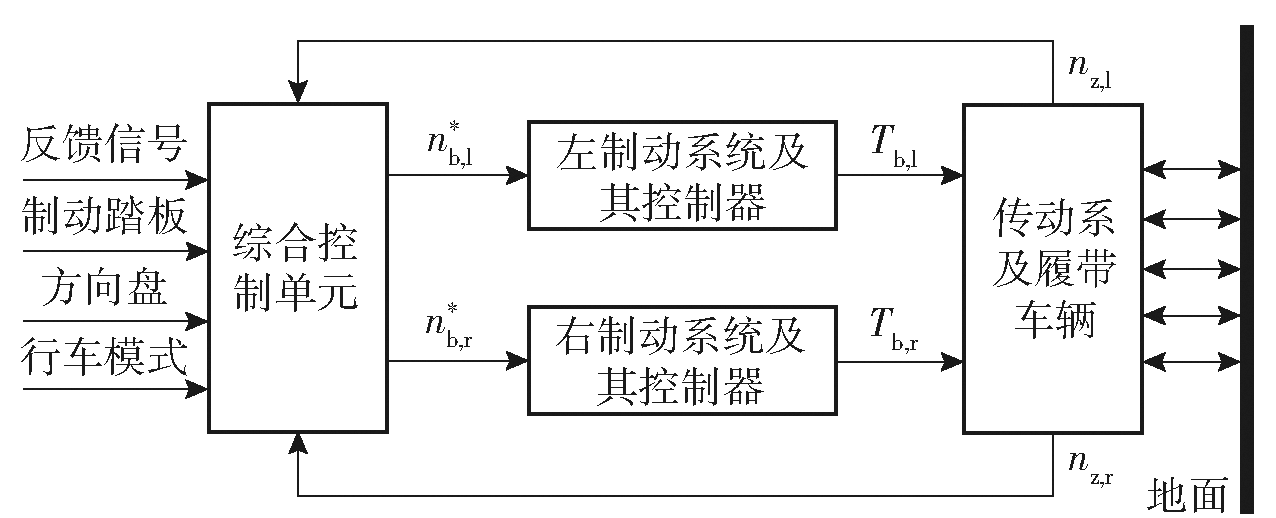
Fig.10 Braking obstacle avoidance control structure

Fig.11 Control structure of integrated control unit
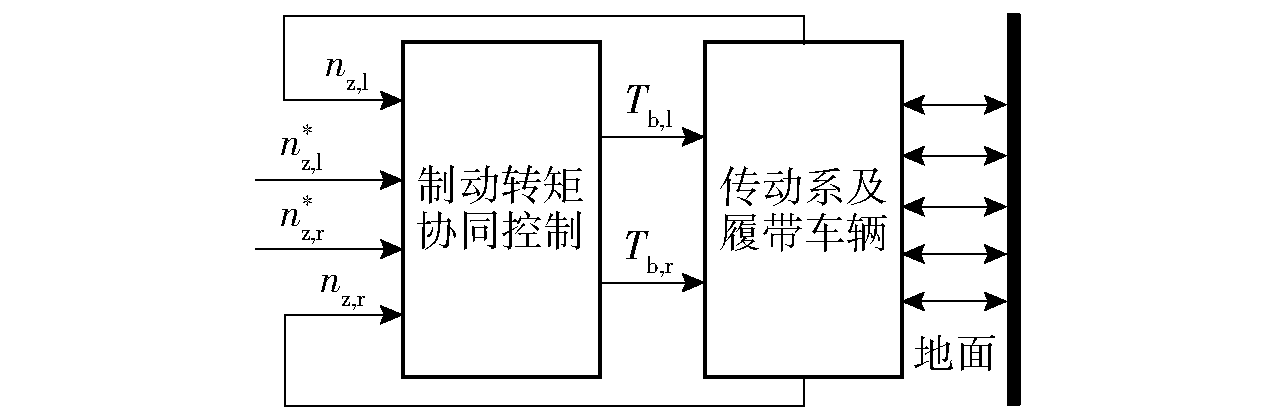
Fig.12 Control structure of hydraulic brake-by-wire system
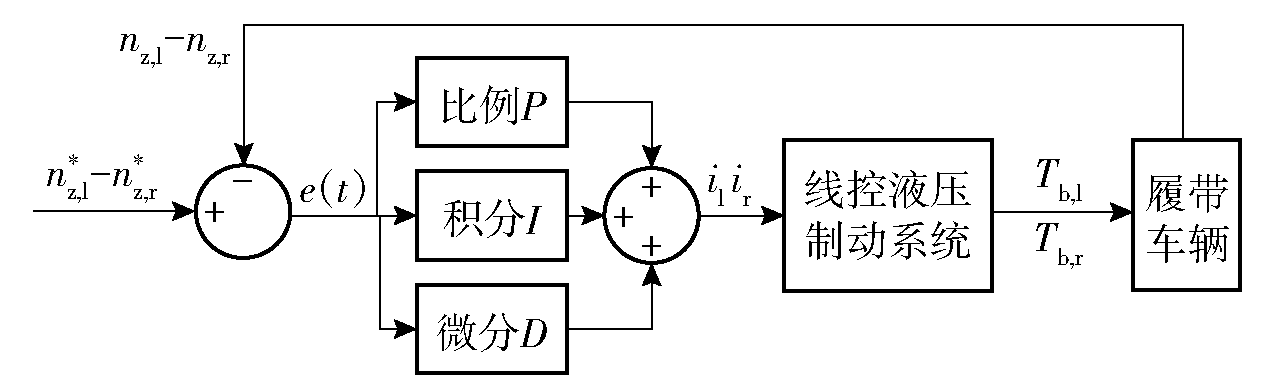
Fig.13 Cooperative control structure of braking torque

Fig.14 Hardware-in-the-loop simulation platform based on RT-LAB
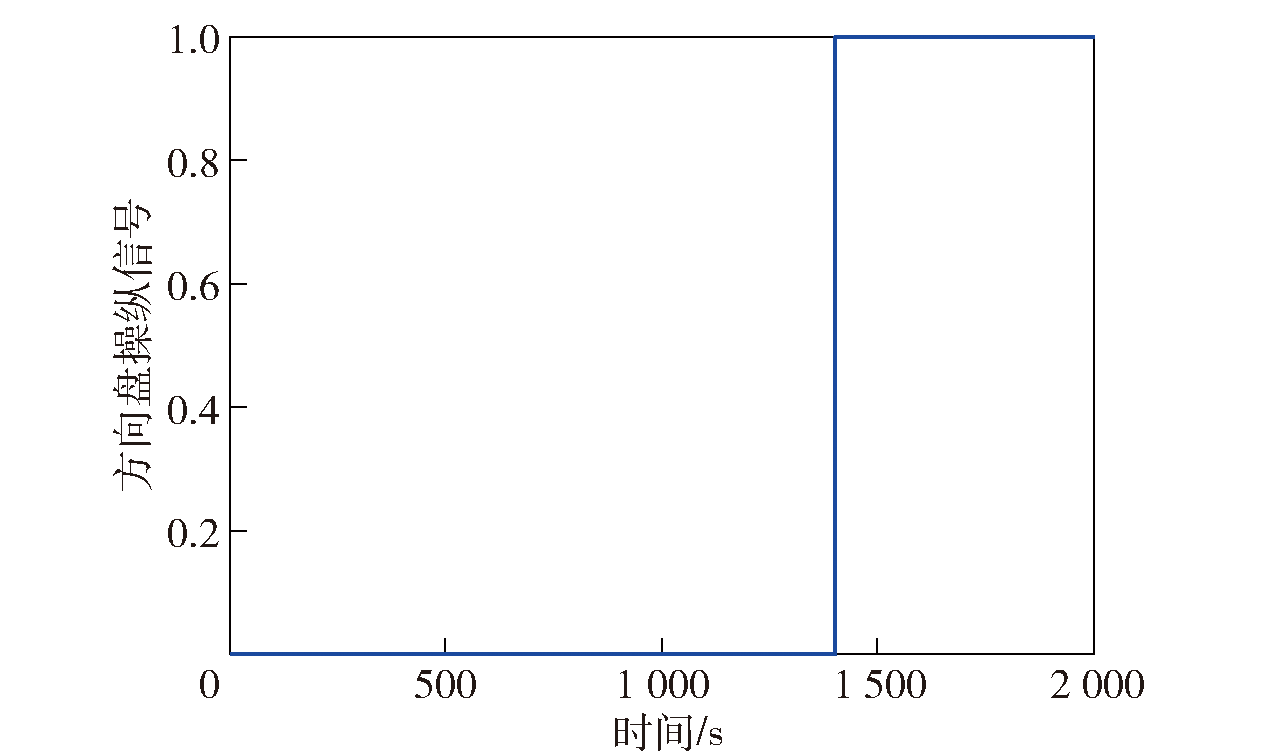
Fig.15 Maneuvering signal
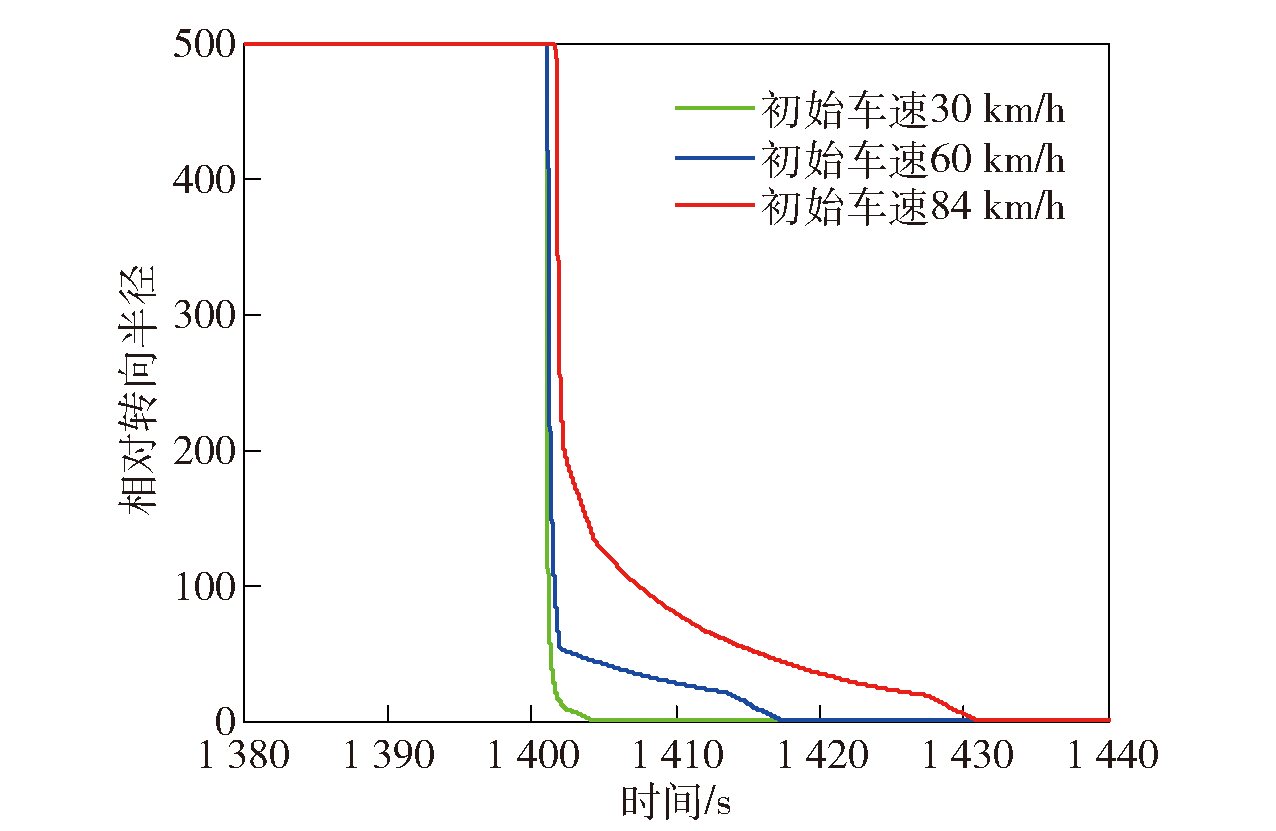
Fig.16 Relative turning radius
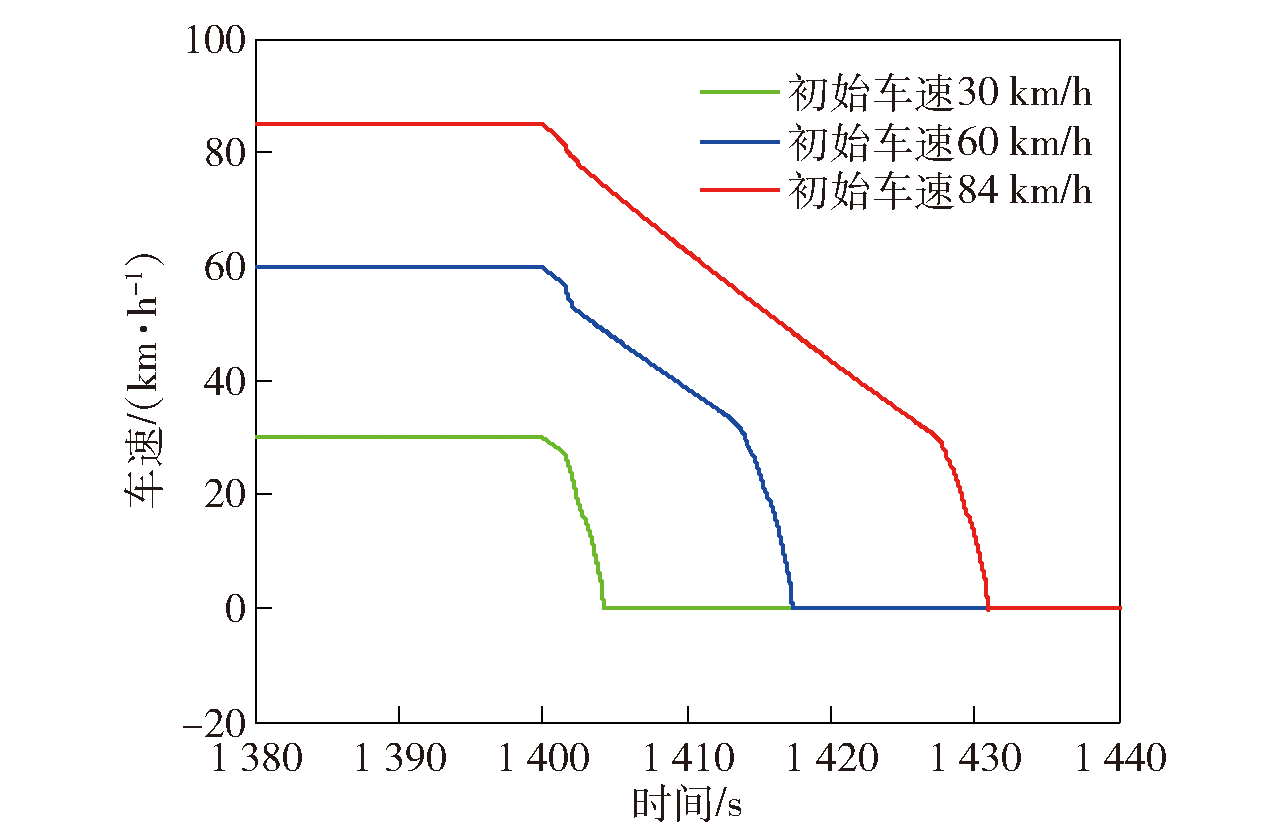
Fig.17 Vehicle speed
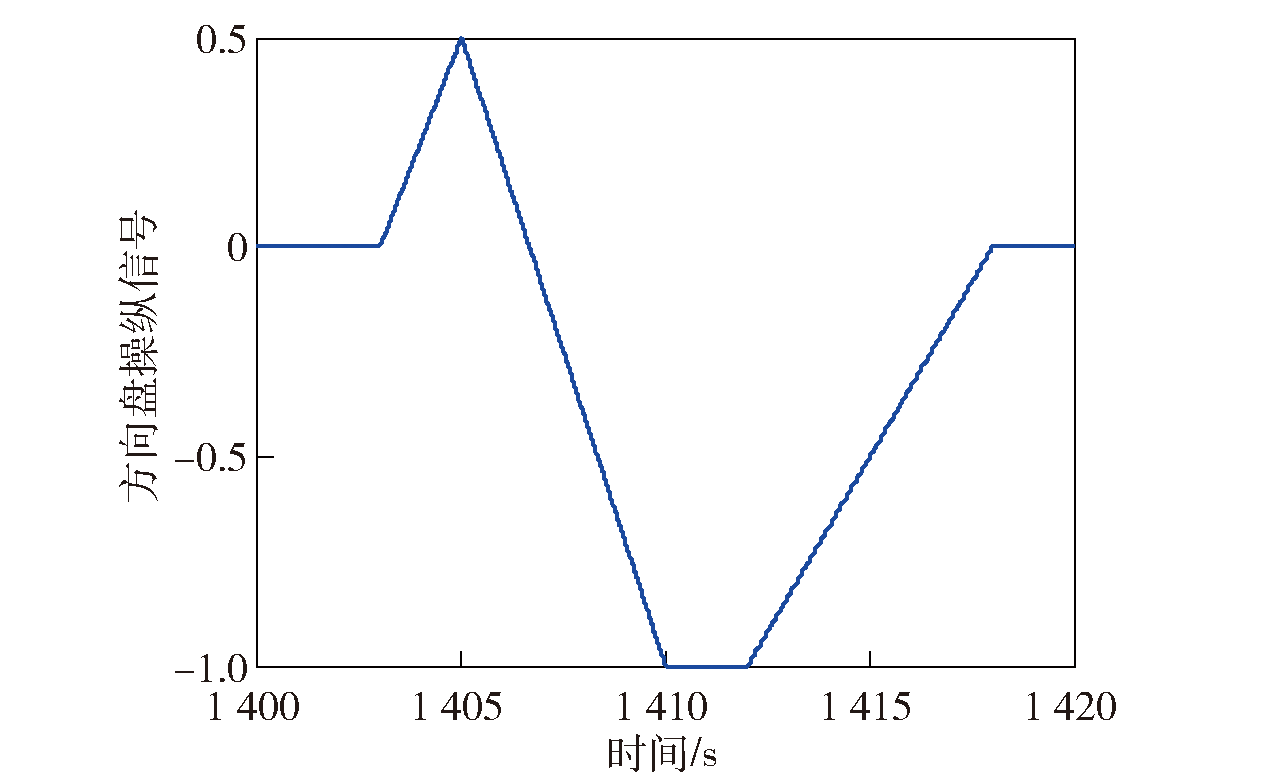
Fig.18 Maneuvering signal
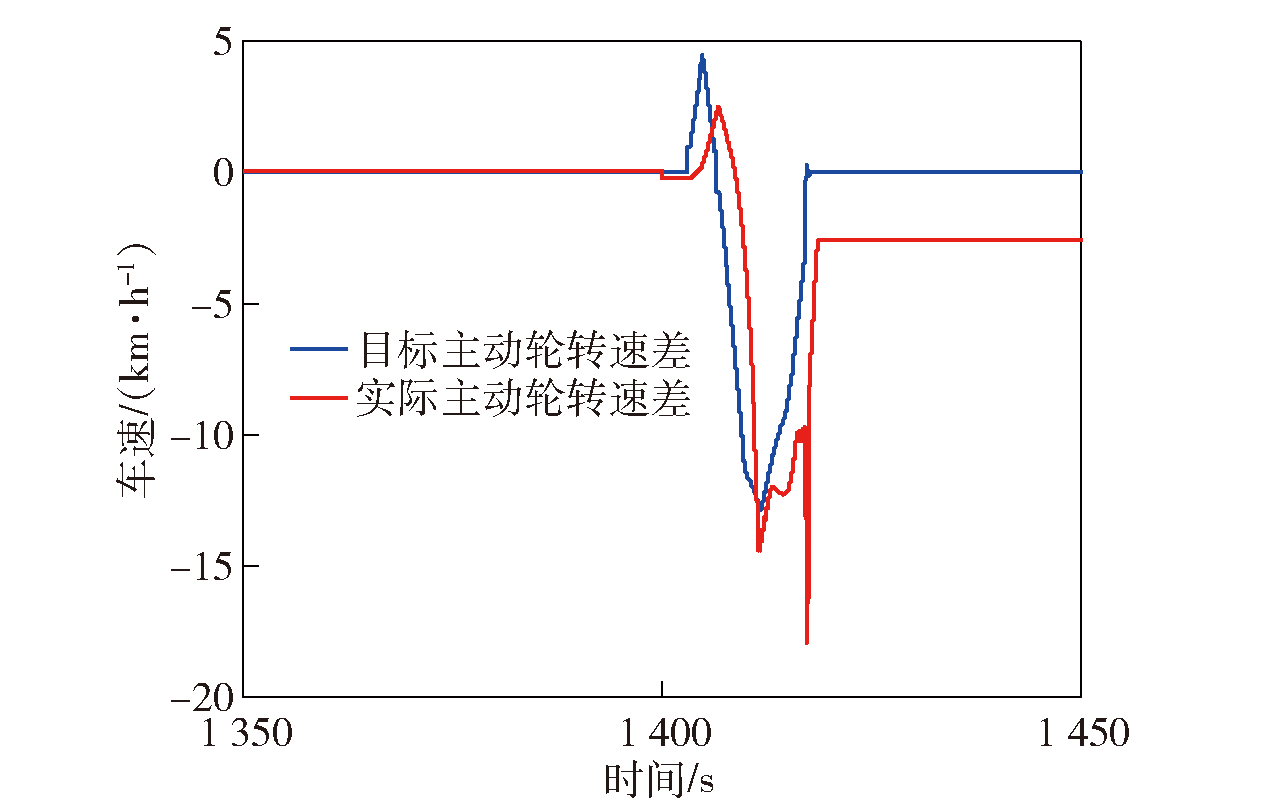
Fig.19 Driving wheel speed

Fig.20 Relative turning radius
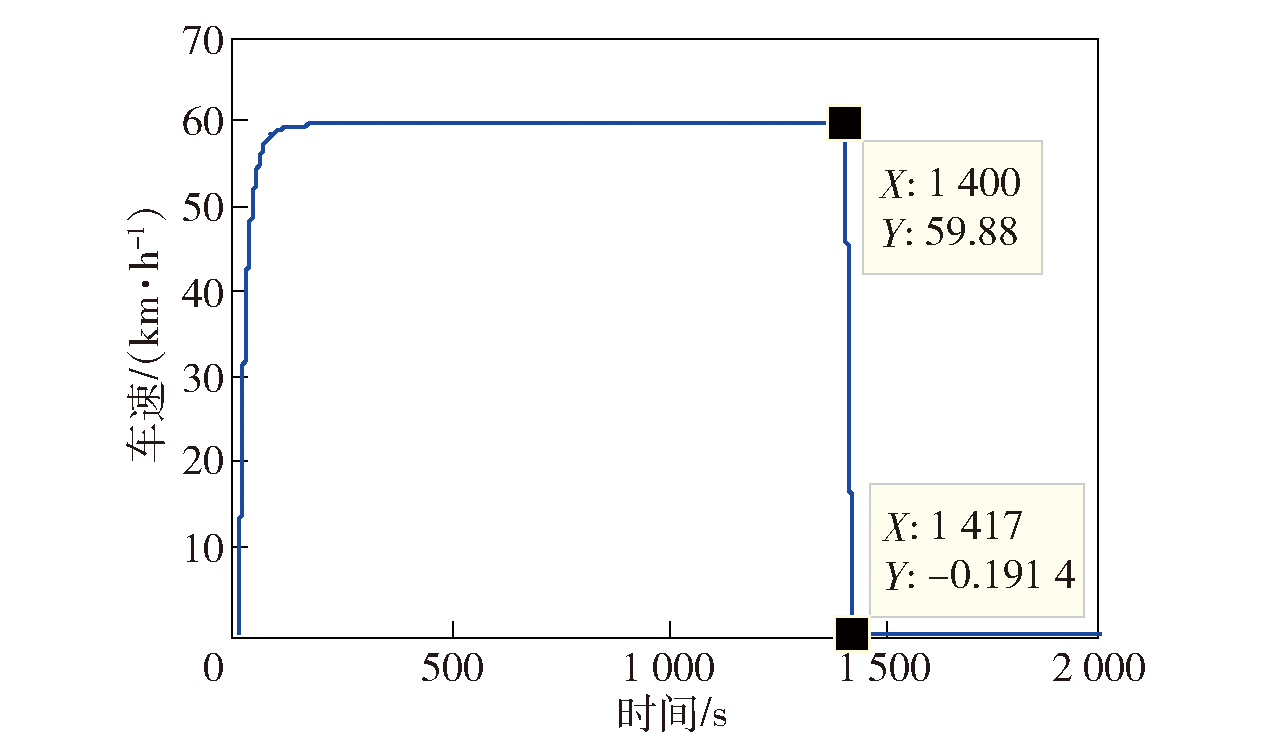
Fig.21 Vehicle speed
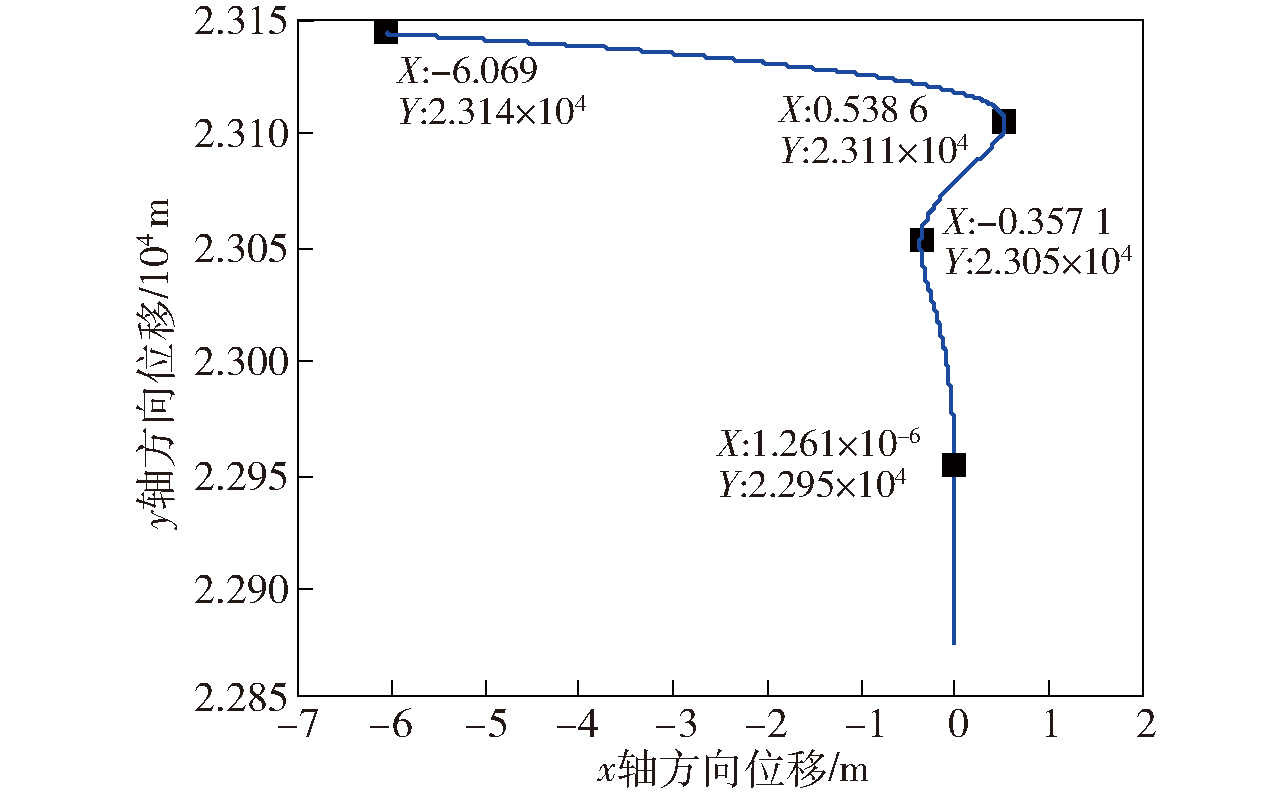
Fig.22 Vehicle running track
| [1] |
盖江涛, 黄守道, 周广明, 等. 双侧电机驱动的功率耦合机构传动方案设计方法[J]. 中国机械工程, 2014, 25(13):1739-1743.
|
|
|
|
| [2] |
盖江涛, 李慎龙, 周广明, 等. 一种履带车辆机电复合传动装置:中国, CN101985279A[P]. 2011-11-02.
|
|
|
|
| [3] |
闫清东, 张连第, 赵毓芹, 等. 坦克构造与设计[M]. 北京: 北京理工大学出版社, 2007.
|
|
|
|
| [4] |
袁艺, 盖江涛, 韩政达, 等. 履带打滑条件下的电驱动车辆转向运动学研究[J]. 车辆与动力技术, 2017(1):6-10.
|
|
|
|
| [5] |
王红岩, 王钦龙, 芮强, 等. 高速履带车辆转向过程分析与试验验证[J]. 机械工程学报, 2014, 50(16):162-172.
|
|
|
|
| [6] |
芮强, 王红岩, 王钦龙, 等. 基于剪应力模型的履带车辆转向力矩分析与试验[J]. 兵工学报, 2015, 36(6):968-977.
doi: 10.3969/j.issn.1000-1093.2015.06.002 |
|
doi: 10.3969/j.issn.1000-1093.2015.06.002 |
|
| [7] |
doi: 10.1016/j.jterra.2010.02.001 URL |
| [8] |
曾庆含, 马晓军, 廖自力, 等. 双侧电驱动履带车辆等效条件积分滑模稳定转向控制[J]. 兵工学报, 2016, 37(8):1351-1358.
doi: 10.3969/j.issn.1000-1093.2016.08.002 |
|
|
|
| [9] |
刘翼, 盖江涛, 陈泳丹, 等. 电传动履带车辆转向自适应控制策略仿真分析[J]. 车辆与动力技术, 2015(1):5-10.
|
|
|
|
| [10] |
张杰, 袁东, 张朋, 等. 双侧电传动履带车辆模糊前馈反馈转向控制[J]. 兵工学报, 2020, 41(8):1688-1696.
doi: 10.3969/j.issn.1000-1093.2020.08.023 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.023 |
|
| [11] |
程军伟, 高连华, 王红岩, 等. 履带车辆转向分析[J]. 兵工学报, 2007, 28(9):1110-1115.
|
|
|
|
| [12] |
doi: 10.1016/j.jterra.2008.07.003 URL |
| [13] |
盖江涛, 刘春生, 马长军, 等. 考虑履带滑转滑移的电驱动履带车辆转向控制[J]. 兵工学报, 2021, 42(10):2092-2101.
doi: 10.3969/j.issn.1000-1093.2021.10.005 |
|
|
|
| [14] |
盖江涛, 黄守道, 周广明, 等. 双电机耦合驱动履带车辆自适应滑膜转向控制[J]. 兵工学报, 2015, 36(3):405-411.
doi: 10.3969/j.issn.1000-1093.2015.03.004 |
|
|
|
| [15] |
王志翔. 高速机电复合传动履带车辆转向稳定控制研究[D]. 北京: 北京理工大学, 2017.
|
|
|
|
| [16] |
王博. 机电复合传动履带车辆转向过程性能预测研究[D]. 北京: 北京理工大学, 2016.
|
|
|
|
| [17] |
张林晖. 基于转矩的履带车辆转向过程协调控制研究[D]. 北京: 北京理工大学, 2015.
|
|
|
|
| [18] |
李荣利, 李善乐, 芮强, 等. 考虑履带滑动的履带车辆转向载荷比分析与验证[J]. 机械工程师, 2018(1):92-95.
|
|
|
|
| [19] |
熊光明, 鲁浩, 郭孔辉, 等. 基于滑动参数实时估计的履带车辆运行轨迹预测方法研究[J]. 兵工学报, 2017, 38(3):600-607.
doi: 10.3969/j.issn.1000-1093.2017.03.025 |
|
|
|
| [20] |
邹渊, 孙逢春, 张承宁. 电传动履带车辆“驾驶员-综合控制器”在环的双侧驱动控制实时仿真[J]. 机械工程学报, 2007, 43(3):193-198.
|
|
|
| [1] | LI Huanhuan, LIU Hui, GAI Jiangtao, LI Xunming. Steering Control of Dual-motor Coupling Drive Tracked Vehicle Based on PSO PID Parameter Optimization [J]. Acta Armamentarii, 2024, 45(3): 916-924. |
| [2] | WANG Xu, LI Rui, HUANG Ying, SHEN Jiwei, SHANG Xianhe. Construction of Driving Cycle for Military Tracked Vehicles Considering Road Features [J]. Acta Armamentarii, 2024, 45(3): 907-915. |
| [3] | LIU Jia, LIU Hai’ou, CHEN Huiyan, MAO Feihong. Road Types Identification Method of Unmanned Tracked Vehicles Based on Fusion Features [J]. Acta Armamentarii, 2023, 44(5): 1267-1276. |
| [4] | LU Jiaxing, LIU Haiou, GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong. Trajectory Tracking Control of Unmanned Tracked Vehicles Based on Adaptive Dual-Parameter Optimization [J]. Acta Armamentarii, 2023, 44(4): 960-971. |
| [5] | TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation [J]. Acta Armamentarii, 2023, 44(11): 3320-3332. |
| [6] | ZHANG Faping, ZHANG Shuchang, WU Kai, ZHANG Yunhe, YAN Yan. Dynamics Parameter Optimization for Tracked Vehicle Based on Surrogate Model Evolution [J]. Acta Armamentarii, 2023, 44(1): 27-39. |
| [7] | ZHANG Ruizeng, GONG Jianwei, CHEN Huiyan, LIU Haiou, LU Jiaxing. Turning Model for Tracked Vehicles on Hard Ground: Analysis and Verification [J]. Acta Armamentarii, 2023, 44(1): 233-246. |
| [8] | ZHOU Cheng, LUO Yang, WEI Jiang, CAO Hongrui, LAN Hai, ZHANG Wanhao. Extraction Method of Instantaneous Frequency Feature of Torsional Vibration Signals of Tracked Vehicle Brake [J]. Acta Armamentarii, 2023, 44(1): 316-324. |
| [9] | YUAN Yi, GAI Jiangtao, ZHOU Guangming, GAO Xiucai, LI Xunming, MA Changjun. Analysis of High-Speed Electric Tracked Vehicle’s Handling Characteristics [J]. Acta Armamentarii, 2023, 44(1): 203-213. |
| [10] | SHUAI Zhibin, HE Shuai, LI Guohui, LI Yaoheng, LI Yong, ZHANG Ying, JIAN Hongchao. Modeling and Optimal Control of Low-Temperature Starting Process of Electro-Mechanical Transmission for Special Tracked Vehicles [J]. Acta Armamentarii, 2023, 44(1): 117-128. |
| [11] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [12] | XIA Meng, ZHAO Chang-lu, HUANG Ying, ZHANG Fu-jun, LI Gang. Research on Feedforward-feedback Speed Control of Turbocharged Diesel Engine [J]. Acta Armamentarii, 2016, 37(9): 1561-1569. |
| [13] | ZENG Qing-han, MA Xiao-jun, LIAO Zi-li, WEI Shu-guang. Stable Steer Control of Electric Drive Tracked Vehicle Based on Equivalent Sliding Mode Technique with Conditional Integrator [J]. Acta Armamentarii, 2016, 37(8): 1351-1358. |
| [14] | WANG Qin-long, WANG Hong-yan, RUI Qiang. Research on Parameter Updating of High Mobility Tracked Vehicle Dynamic Model Based on Multi-objectiveGenetic Algorithm [J]. Acta Armamentarii, 2016, 37(6): 969-978. |
| [15] | WANG Hong-yan, CHEN Bing, RUI Qiang, GUO Jing, SHI Li-chen. Analysis and Experiment of Steady-state Steering of Tracked Vehicle under Concentrated Load [J]. Acta Armamentarii, 2016, 37(12): 2196-2204. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||