
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (9): 241013-.doi: 10.12382/bgxb.2024.1013
Previous Articles Next Articles
SHI Qi1,2, MAO Yunsheng1,2, SHUI Jinpeng1,2, CHEN Liuyi1,2, LIANG Qiyu1,2, SONG Lifei1,2,*( )
)
Received:2024-11-05
Online:2025-09-24
Contact:
SONG Lifei
CLC Number:
SHI Qi, MAO Yunsheng, SHUI Jinpeng, CHEN Liuyi, LIANG Qiyu, SONG Lifei. Improvement and Optimization of Rectangular Closed-loop Magnetic Array Adsorption Module for Wall-climbing Robots[J]. Acta Armamentarii, 2025, 46(9): 241013-.
Add to citation manager EndNote|Ris|BibTeX
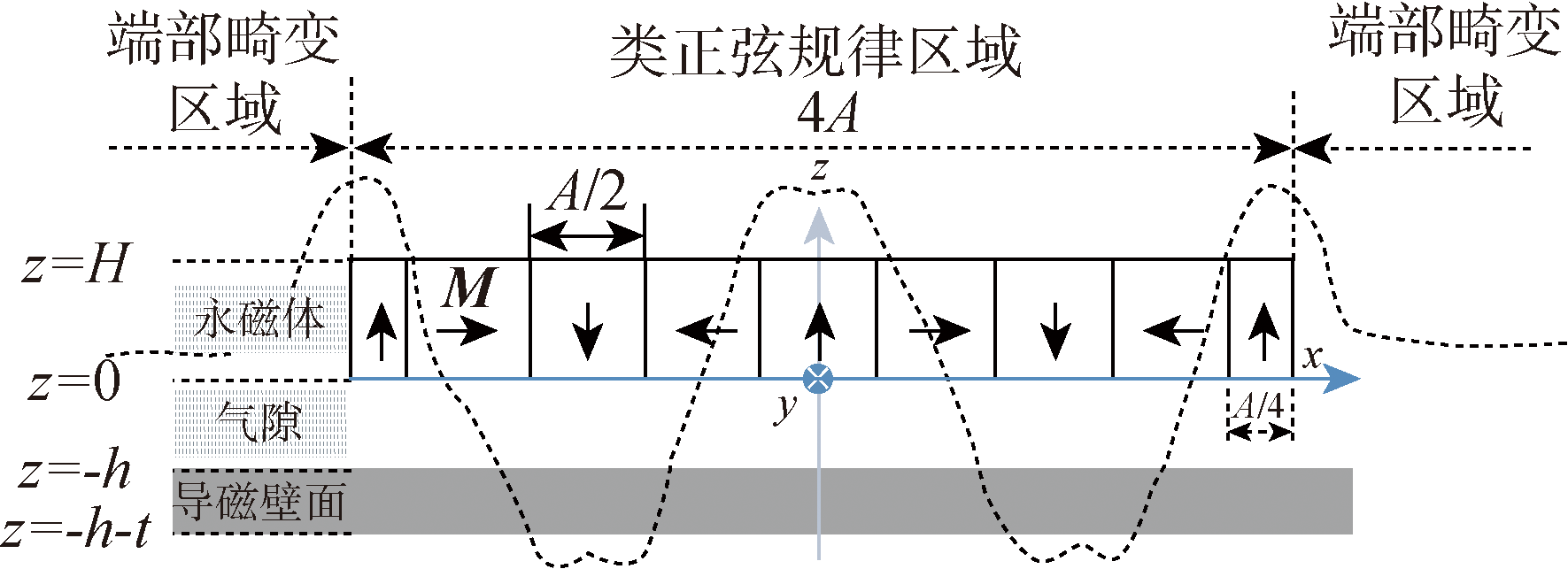
Fig.1 Simplified model of the magnetic field of an infinite-length Halbach magnetic array
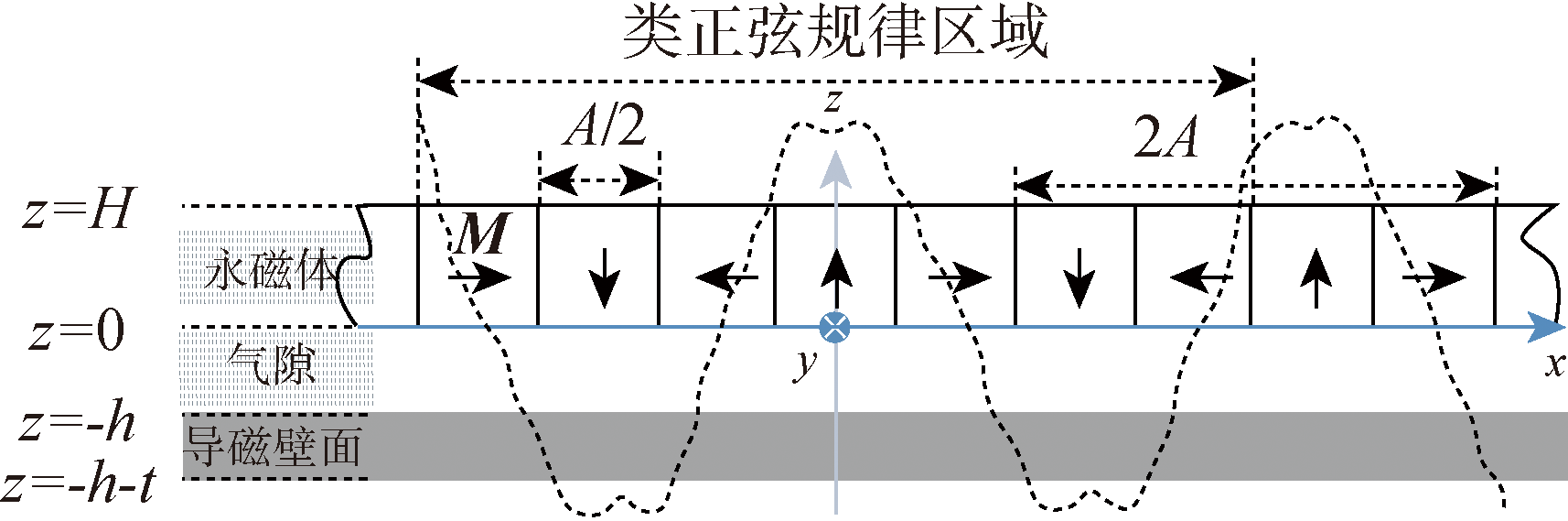
Fig.2 Simplified model of the magnetic field of a finite-length Halbach magnetic array

Fig.3 Structures of wall-climbing robot and magnetic adsorption module

Fig.4 Program design route of rectangular Halbach magnetic array
| 方案 | 磁路 | 示意图 | 总磁吸附力/N | 磁体数量 | 磁体体积/mm3 | 单位体积磁吸附力/(N·mm-3) |
|---|---|---|---|---|---|---|
| 基础方案 | 八磁路 | | 146.39 | 8 | 10×10×10 | 0.01829 |
| 方案1 | 十二磁路 | | 160.57 | 8 | 10×10×10 | 0.02007 |
| 方案2 | 十六磁路 | | 122.46 | 12 | 6×10×10 | 0.01701 |
| 方案3 | 十九磁路 | | 134.4 | 13 | 6×10×10 | 0.01723 |
| 方案4 | 二十磁路 | | 79.857 | 16 | 6×6×10 | 0.01386 |
| 方案5 | 三十磁路 | | 108.6 | 21 | 6×6×10 | 0.01437 |
Table 1 Comparison of magnetic forces of magnetic arrays with different magnetic circuits
| 方案 | 磁路 | 示意图 | 总磁吸附力/N | 磁体数量 | 磁体体积/mm3 | 单位体积磁吸附力/(N·mm-3) |
|---|---|---|---|---|---|---|
| 基础方案 | 八磁路 | | 146.39 | 8 | 10×10×10 | 0.01829 |
| 方案1 | 十二磁路 | | 160.57 | 8 | 10×10×10 | 0.02007 |
| 方案2 | 十六磁路 | | 122.46 | 12 | 6×10×10 | 0.01701 |
| 方案3 | 十九磁路 | | 134.4 | 13 | 6×10×10 | 0.01723 |
| 方案4 | 二十磁路 | | 79.857 | 16 | 6×6×10 | 0.01386 |
| 方案5 | 三十磁路 | | 108.6 | 21 | 6×6×10 | 0.01437 |
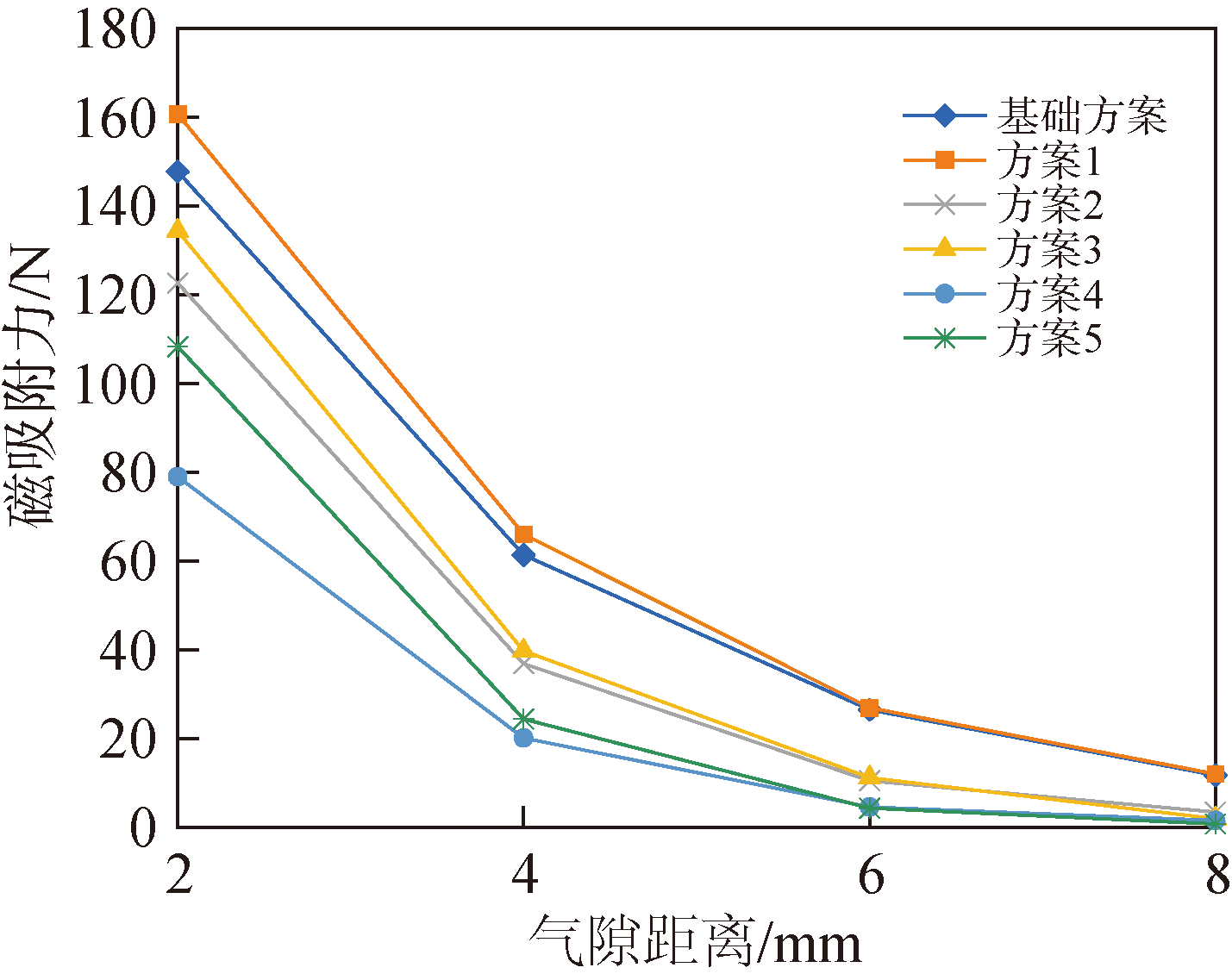
Fig.5 Magnetic force variation of different magnetic circuits under air gap variation
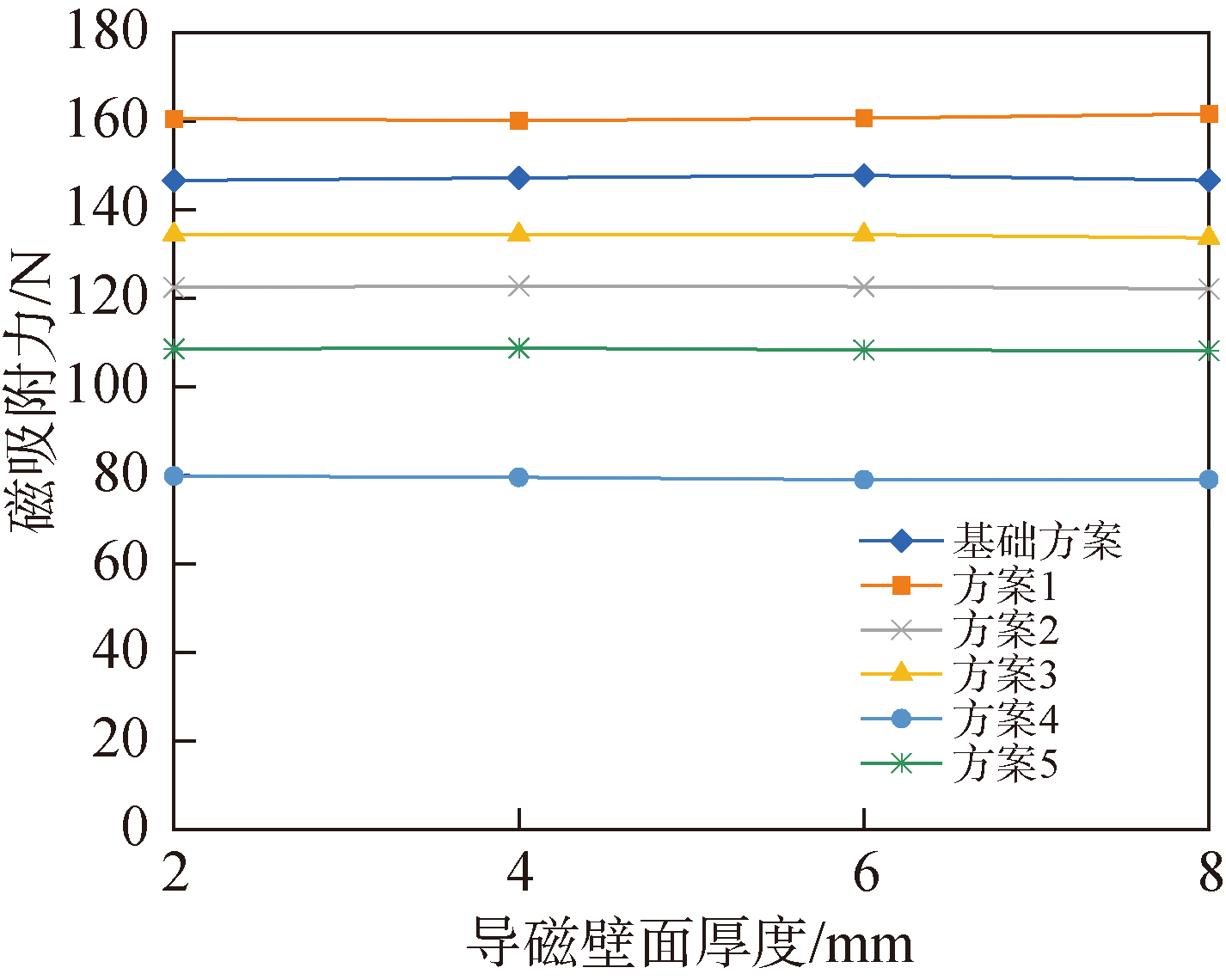
Fig.6 Variation of magnetic force for different magnetic circuits under wall thickness variation
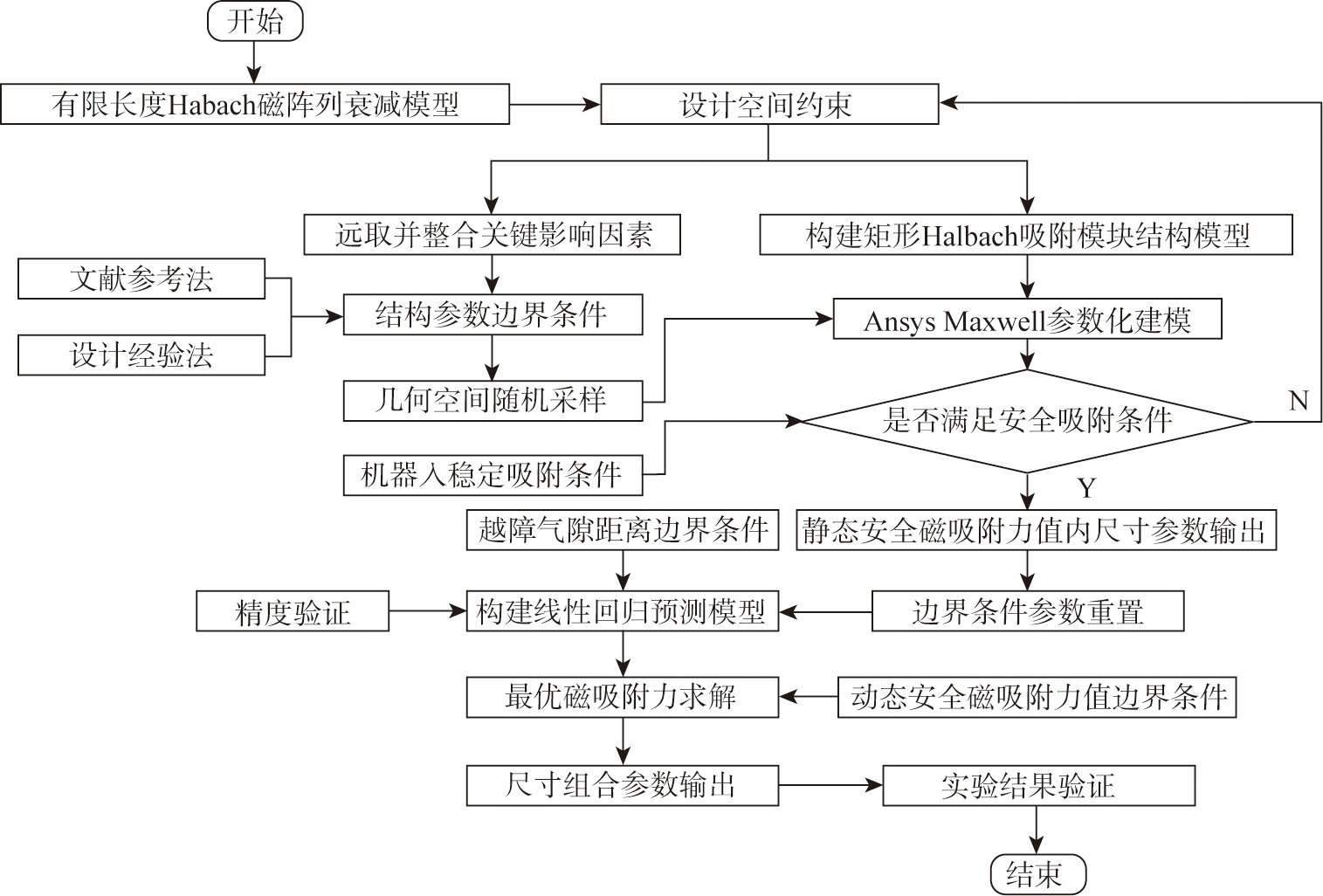
Fig.7 Logic diagram for optimization of main parameters of rectangular Halbach magnetic array structure
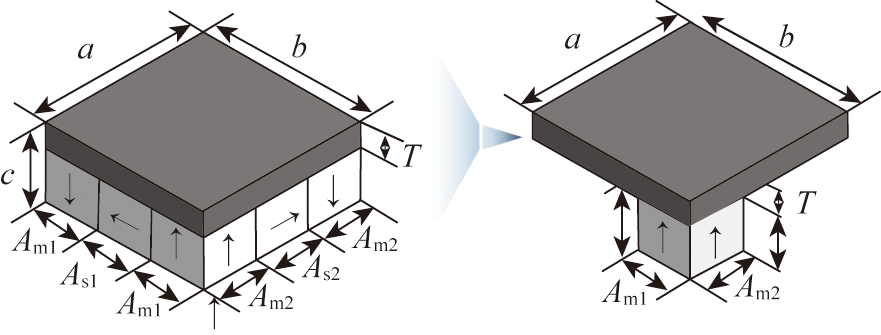
Fig.8 Dimension parameters of rectangular Halbach magnetic array structure
| 参数 | 数值 |
|---|---|
| H/mm | [7,14] |
| Am1/mm | [4,13] |
| Am2/mm | |
| t/mm | 5 |
| h/mm | 3 |
| a/mm | 30 |
| b/mm | 30 |
| c/mm | 15 |
Table 2 Key parameter values
| 参数 | 数值 |
|---|---|
| H/mm | [7,14] |
| Am1/mm | [4,13] |
| Am2/mm | |
| t/mm | 5 |
| h/mm | 3 |
| a/mm | 30 |
| b/mm | 30 |
| c/mm | 15 |
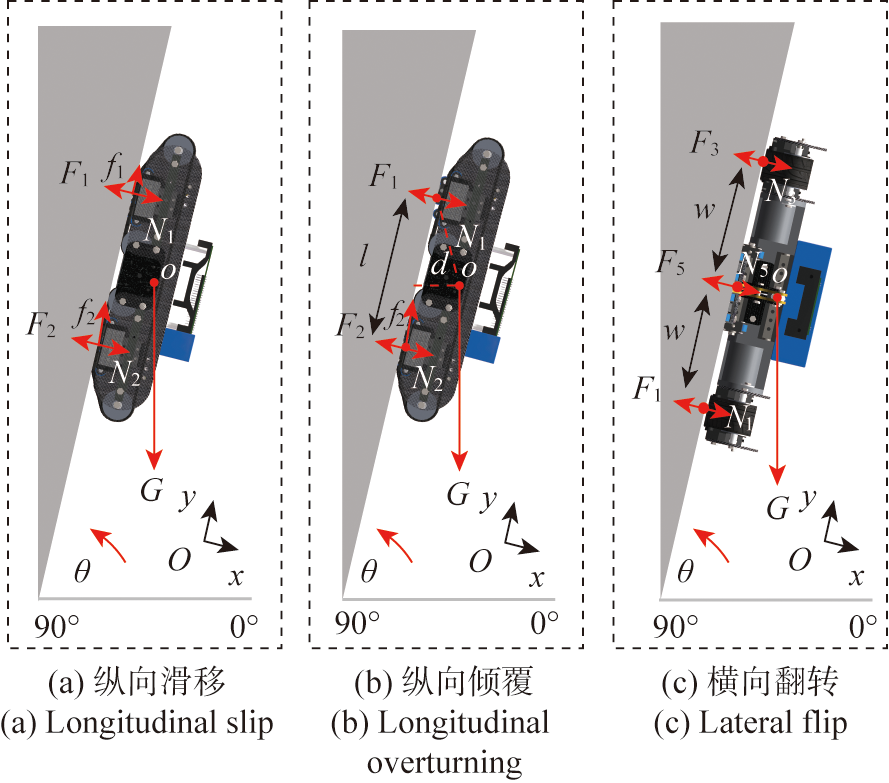
Fig.9 Static orce of robotic system
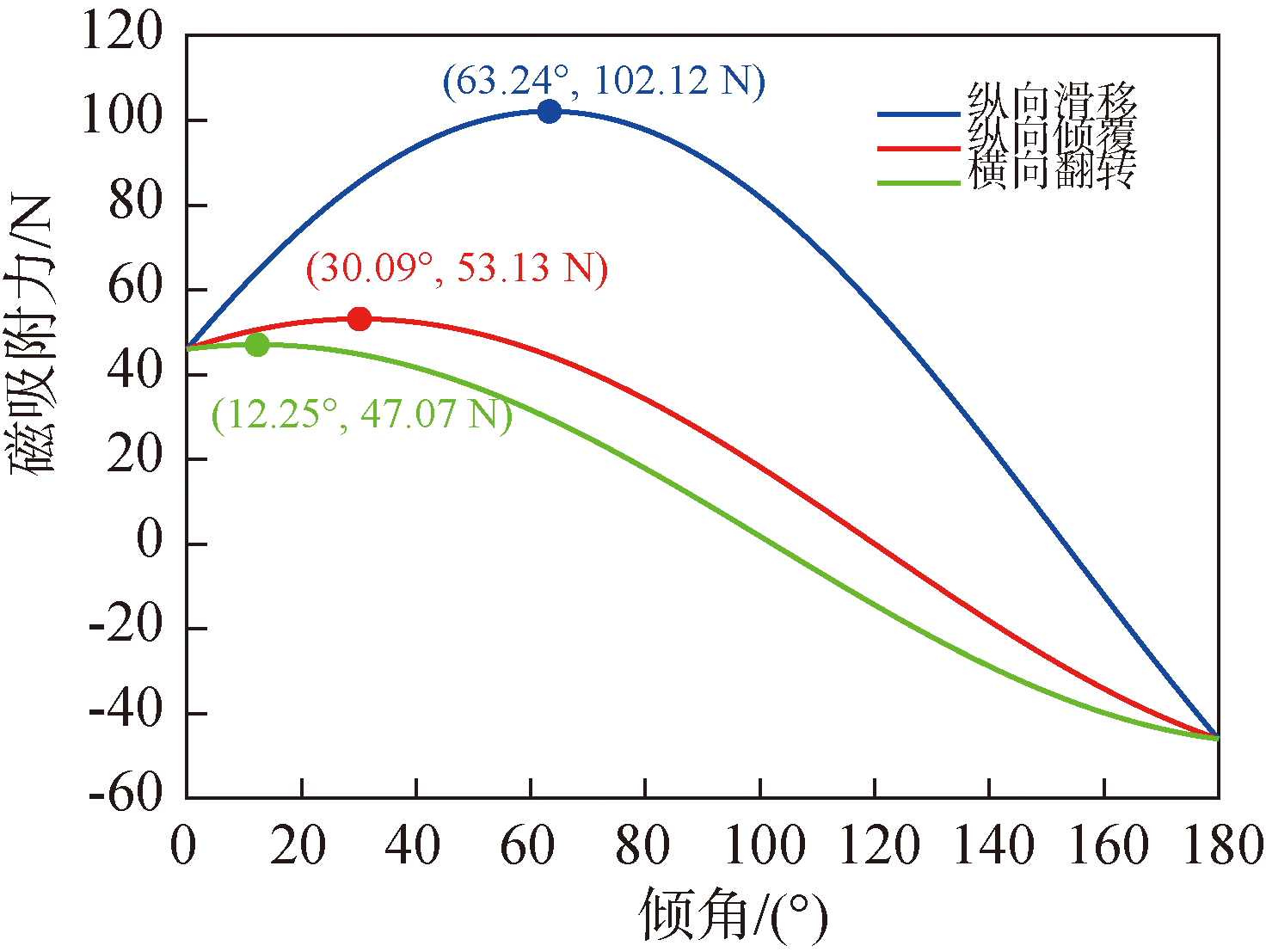
Fig.10 Variation of magnetic force with angle for three failure modes within a 180° range
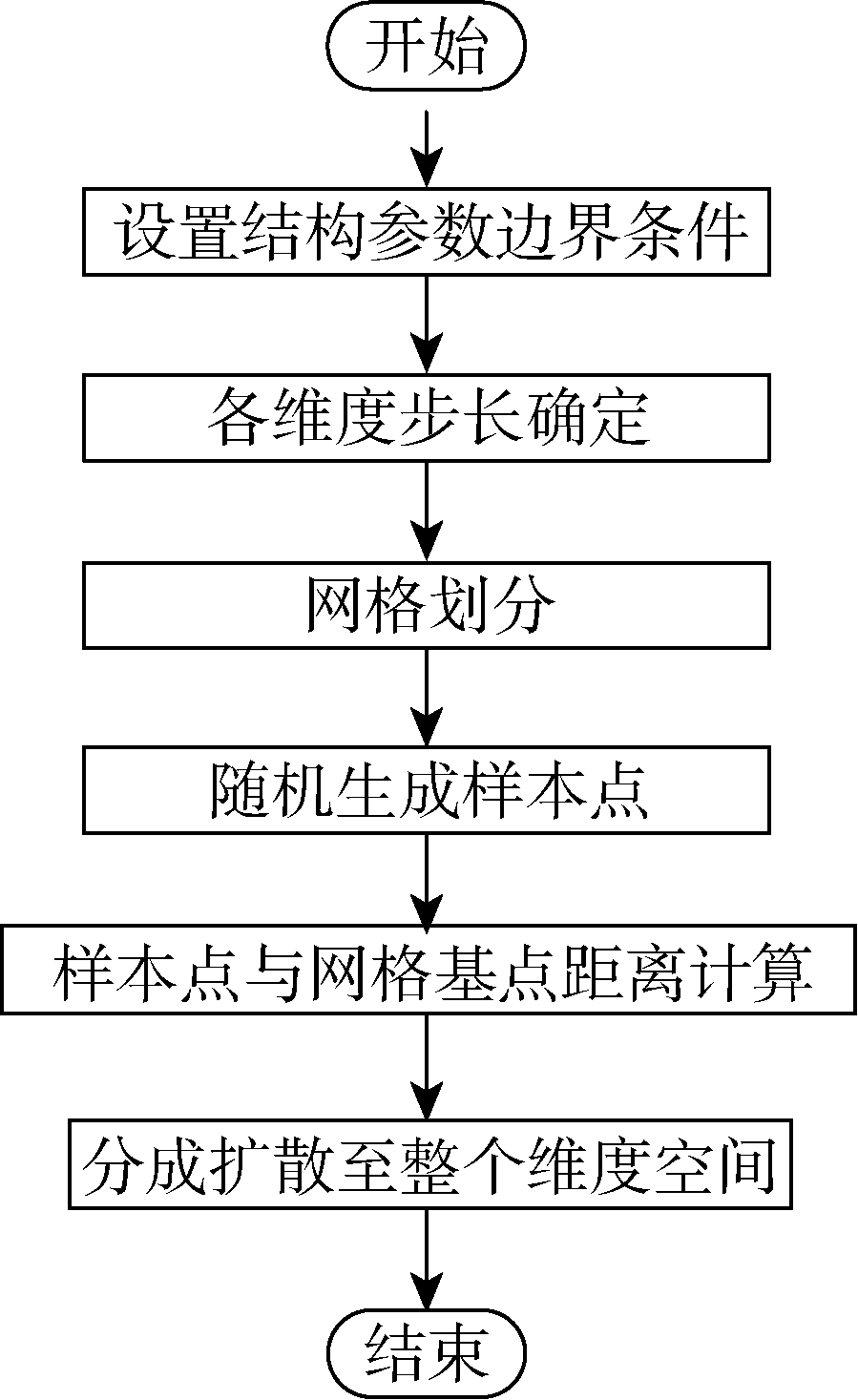
Fig.11 Geometric spatial random uniform sampling process
| 序号 | Am1/mm | Am2/mm | H/mm | F/N |
|---|---|---|---|---|
| 1 | 10.3357 | 8.4036 | 13.8619 | 104.5255 |
| 2 | 11.3818 | 13.2948 | 9.8718 | 103.5731 |
| 3 | 13.2585 | 9.49195 | 13.8918 | 114.1140 |
| 4 | 13.3671 | 9.16431 | 12.0854 | 106.4561 |
| 5 | 11.2002 | 8.95901 | 11.9724 | 106.5326 |
| 6 | 10.2050 | 10.6433 | 12.3298 | 114.3527 |
| 7 | 11.7911 | 12.8627 | 10.0698 | 107.2076 |
| 8 | 13.8512 | 9.4308 | 13.9405 | 110.7030 |
| 9 | 10.3015 | 9.2317 | 13.0263 | 108.7921 |
| 10 | 10.1867 | 13.4361 | 12.6585 | 115.4847 |
| 11 | 8.9248 | 12.4708 | 12.1209 | 107.4850 |
| 12 | 9.1972 | 12.5001 | 13.4336 | 113.7884 |
| 13 | 13.2405 | 10.9135 | 11.5979 | 113.5201 |
| 14 | 12.6339 | 11.5551 | 13.5914 | 124.6796 |
| 15 | 13.3666 | 10.9200 | 13.4765 | 120.1272 |
| 16 | 11.8380 | 8.9514 | 13.9762 | 113.9812 |
| 17 | 13.4409 | 9.2477 | 11.4943 | 104.5890 |
| 18 | 10.7765 | 10.3508 | 10.0264 | 102.9980 |
| 19 | 11.9956 | 12.2862 | 13.3898 | 125.1924 |
| 20 | 13.1883 | 13.3964 | 12.6995 | 111.1677 |
| 21 | 11.3755 | 13.0154 | 11.2925 | 113.0044 |
| 22 | 12.8944 | 8.3855 | 13.3864 | 108.0141 |
| 23 | 13.0824 | 13.3945 | 10.4635 | 103.6425 |
| 24 | 11.2759 | 11.0815 | 9.5889 | 104.2145 |
| 25 | 10.8567 | 13.7308 | 13.7966 | 117.2943 |
| 26 | 10.4024 | 10.1996 | 10.5422 | 104.7440 |
| 27 | 12.5845 | 11.8480 | 10.7926 | 112.2580 |
| 28 | 8.6519 | 12.6053 | 13.6125 | 110.6508 |
| 29 | 13.0296 | 12.5655 | 10.3337 | 106.7189 |
| 30 | 11.7627 | 11.4825 | 9.4877 | 105.3202 |
Table 3 Sample point data for partially safe adsorption magnetic force value domain constraints
| 序号 | Am1/mm | Am2/mm | H/mm | F/N |
|---|---|---|---|---|
| 1 | 10.3357 | 8.4036 | 13.8619 | 104.5255 |
| 2 | 11.3818 | 13.2948 | 9.8718 | 103.5731 |
| 3 | 13.2585 | 9.49195 | 13.8918 | 114.1140 |
| 4 | 13.3671 | 9.16431 | 12.0854 | 106.4561 |
| 5 | 11.2002 | 8.95901 | 11.9724 | 106.5326 |
| 6 | 10.2050 | 10.6433 | 12.3298 | 114.3527 |
| 7 | 11.7911 | 12.8627 | 10.0698 | 107.2076 |
| 8 | 13.8512 | 9.4308 | 13.9405 | 110.7030 |
| 9 | 10.3015 | 9.2317 | 13.0263 | 108.7921 |
| 10 | 10.1867 | 13.4361 | 12.6585 | 115.4847 |
| 11 | 8.9248 | 12.4708 | 12.1209 | 107.4850 |
| 12 | 9.1972 | 12.5001 | 13.4336 | 113.7884 |
| 13 | 13.2405 | 10.9135 | 11.5979 | 113.5201 |
| 14 | 12.6339 | 11.5551 | 13.5914 | 124.6796 |
| 15 | 13.3666 | 10.9200 | 13.4765 | 120.1272 |
| 16 | 11.8380 | 8.9514 | 13.9762 | 113.9812 |
| 17 | 13.4409 | 9.2477 | 11.4943 | 104.5890 |
| 18 | 10.7765 | 10.3508 | 10.0264 | 102.9980 |
| 19 | 11.9956 | 12.2862 | 13.3898 | 125.1924 |
| 20 | 13.1883 | 13.3964 | 12.6995 | 111.1677 |
| 21 | 11.3755 | 13.0154 | 11.2925 | 113.0044 |
| 22 | 12.8944 | 8.3855 | 13.3864 | 108.0141 |
| 23 | 13.0824 | 13.3945 | 10.4635 | 103.6425 |
| 24 | 11.2759 | 11.0815 | 9.5889 | 104.2145 |
| 25 | 10.8567 | 13.7308 | 13.7966 | 117.2943 |
| 26 | 10.4024 | 10.1996 | 10.5422 | 104.7440 |
| 27 | 12.5845 | 11.8480 | 10.7926 | 112.2580 |
| 28 | 8.6519 | 12.6053 | 13.6125 | 110.6508 |
| 29 | 13.0296 | 12.5655 | 10.3337 | 106.7189 |
| 30 | 11.7627 | 11.4825 | 9.4877 | 105.3202 |
| 参数 | 水平 | ||
|---|---|---|---|
| -1 | 0 | 1 | |
| Am1 /mm | 8 | 11 | 14 |
| Am2/mm | 8 | 11 | 14 |
| H/mm | 9 | 11.5 | 14 |
Table 4 Experimental design of Box-Behnken response surface
| 参数 | 水平 | ||
|---|---|---|---|
| -1 | 0 | 1 | |
| Am1 /mm | 8 | 11 | 14 |
| Am2/mm | 8 | 11 | 14 |
| H/mm | 9 | 11.5 | 14 |
| 工况 | Am1/mm | /mm | H/mm | 相对误差绝对值/% | 平均相对误差/% | ||
|---|---|---|---|---|---|---|---|
| 仿真值 | 预测值 | ||||||
| 1 | 12 | 12 | 13 | 124.425 | 121.8130 | 2.100 | 1.2615 |
| 2 | 13 | 9 | 14 | 114.290 | 113.5540 | 0.644 | |
| 3 | 9 | 13 | 14 | 112.220 | 112.4042 | 0.164 | |
| 4 | 11 | 9 | 12 | 105.580 | 107.8368 | 2.138 | |
Table 5 Verification of accuracies of simulated and predicted values
| 工况 | Am1/mm | /mm | H/mm | 相对误差绝对值/% | 平均相对误差/% | ||
|---|---|---|---|---|---|---|---|
| 仿真值 | 预测值 | ||||||
| 1 | 12 | 12 | 13 | 124.425 | 121.8130 | 2.100 | 1.2615 |
| 2 | 13 | 9 | 14 | 114.290 | 113.5540 | 0.644 | |
| 3 | 9 | 13 | 14 | 112.220 | 112.4042 | 0.164 | |
| 4 | 11 | 9 | 12 | 105.580 | 107.8368 | 2.138 | |
| 序号 | Am1/mm | Am2/mm | H/mm | FV1/N | FV2/N | ||
|---|---|---|---|---|---|---|---|
| 原值 | h=2mm | h=7mm | |||||
| 1 | 12 | 11 | 14 | 124.425 | 203.097 | 20.4155 | 447.0250 |
| 2 | 13 | 12 | 14 | 127.199 | 207.129 | 18.7207 | 451.6994 |
| 3 | 11 | 12 | 14 | 126.505 | 203.087 | 19.9831 | 446.1402 |
| 4 | 11 | 11 | 14 | 125.524 | 198.962 | 19.9558 | 437.8356 |
Table 6 Simulation value comparison analysis
| 序号 | Am1/mm | Am2/mm | H/mm | FV1/N | FV2/N | ||
|---|---|---|---|---|---|---|---|
| 原值 | h=2mm | h=7mm | |||||
| 1 | 12 | 11 | 14 | 124.425 | 203.097 | 20.4155 | 447.0250 |
| 2 | 13 | 12 | 14 | 127.199 | 207.129 | 18.7207 | 451.6994 |
| 3 | 11 | 12 | 14 | 126.505 | 203.087 | 19.9831 | 446.1402 |
| 4 | 11 | 11 | 14 | 125.524 | 198.962 | 19.9558 | 437.8356 |
| 状态 | 尺寸参数/mm | 轭铁厚度/ mm | 气隙/mm | 模块磁吸 附力/N |
|---|---|---|---|---|
| 优化前 | 10×10×10 | 5 | 2 | 155.110 |
| 优化后 | 12×12×14 | 1 | 2 | 207.129 |
Table 7 Main magnet size optimization before and after comparison
| 状态 | 尺寸参数/mm | 轭铁厚度/ mm | 气隙/mm | 模块磁吸 附力/N |
|---|---|---|---|---|
| 优化前 | 10×10×10 | 5 | 2 | 155.110 |
| 优化后 | 12×12×14 | 1 | 2 | 207.129 |
| 磁路方案 | 主磁铁尺寸参数/mm | 模块磁吸附力/N |
|---|---|---|
| 开放磁路方案 | 30×30×14 | 128.790 |
| 三磁路方案[ | 13×30×14 | 200.090 |
| 方案1 | 12×12×14 | 207.129 |
Table 8 Comparison of existing magnetic circuit patterns
| 磁路方案 | 主磁铁尺寸参数/mm | 模块磁吸附力/N |
|---|---|---|
| 开放磁路方案 | 30×30×14 | 128.790 |
| 三磁路方案[ | 13×30×14 | 200.090 |
| 方案1 | 12×12×14 | 207.129 |
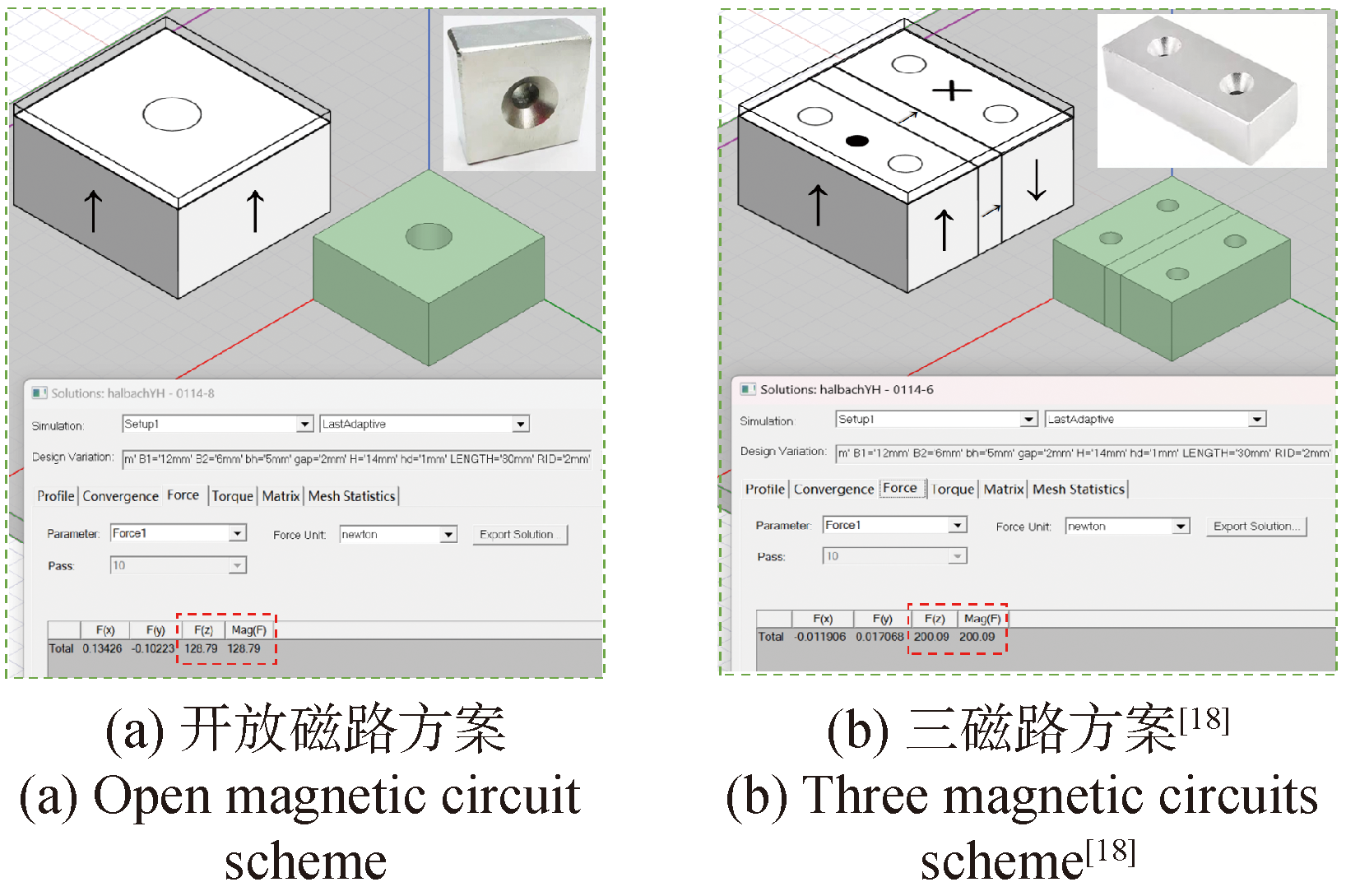
Fig.12 Magnetic force simulation of triple and open magnetic circuits

Fig.13 Adsorption force test of magnetic adsorption module
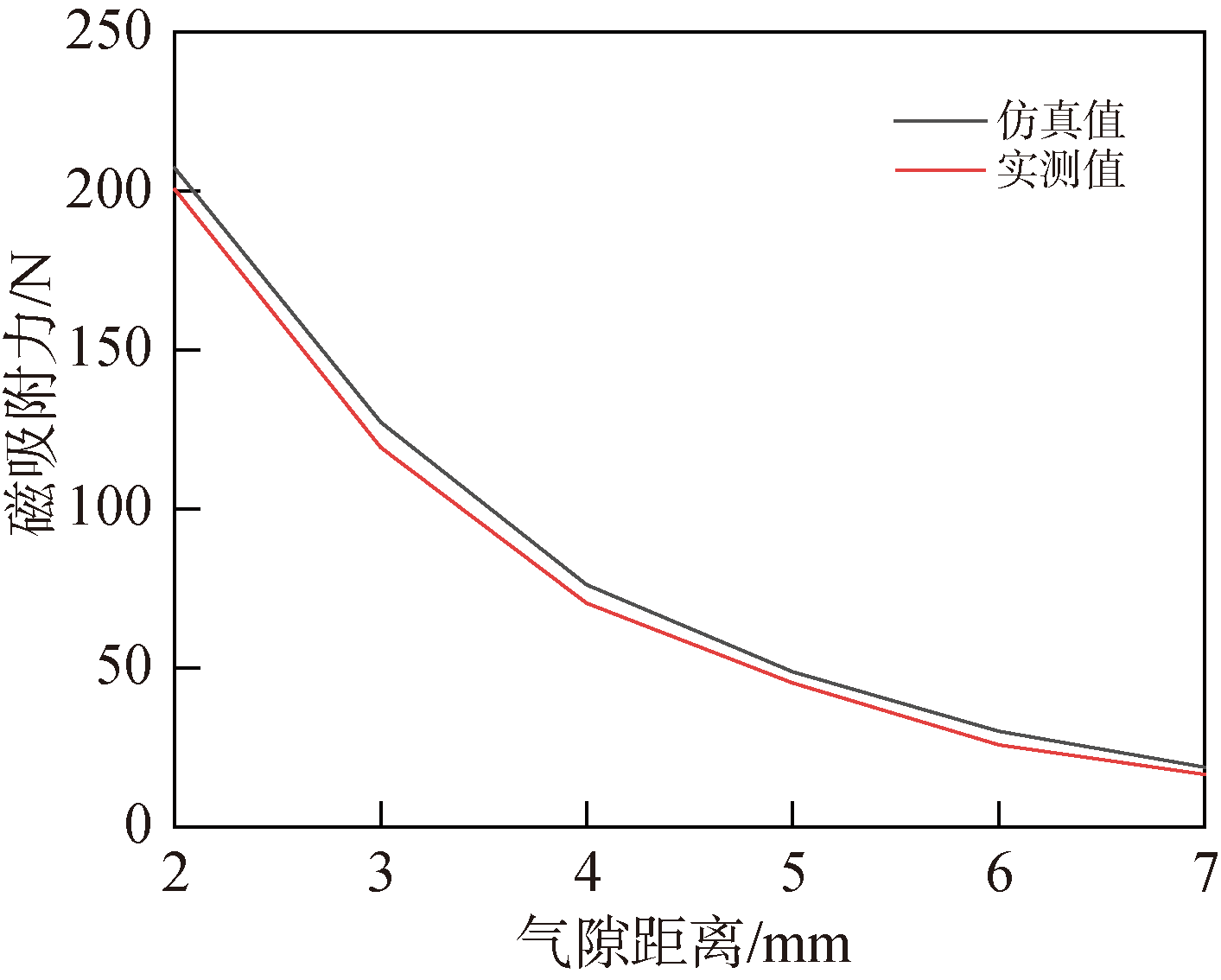
Fig.14 Comparison between magnetic force simulated and measured values under various air gaps

Fig.15 Surface adaptive motion for wall-climbing robot
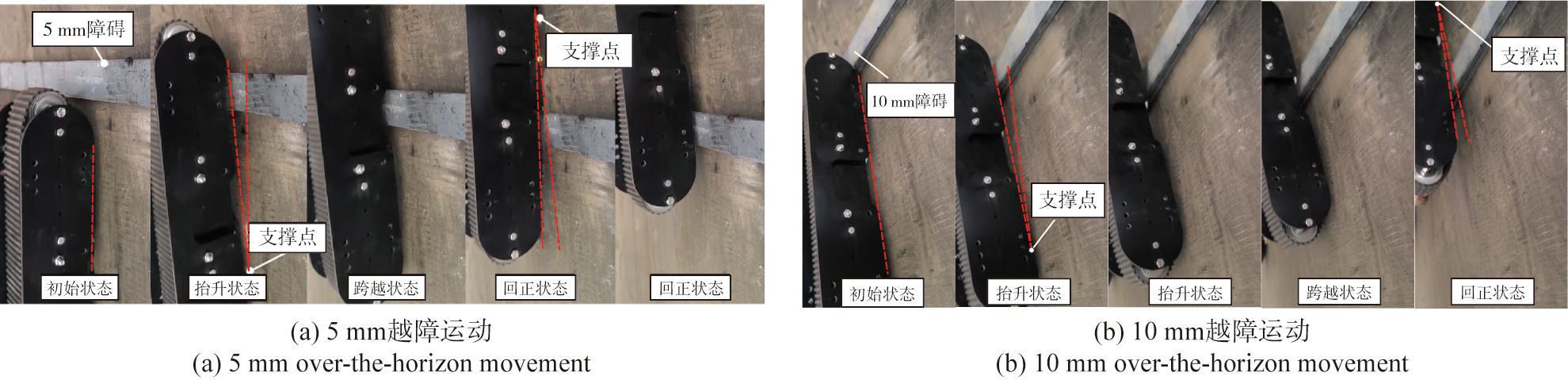
Fig.16 Obstacle-crossing motion of wall-climbing robot

Fig.17 Experimental site of wall-climbing robot overpassing weld seam
| [1] |
|
| [2] |
|
| [3] |
王炬成, 施琦, 马晓平, 等. 船体表面作业机器人设计及运动特性[J]. 船舶工程, 2023, 45(4):14-20,87.
|
|
|
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
陈勇, 王昌明, 包建东. 新型爬壁机器人磁吸附单元优化设计[J]. 兵工学报, 2012, 33(12):1539-1544.
|
|
|
|
| [8] |
|
| [9] |
张栋, 杨培, 黄哲轩, 等. 爬壁机器人悬摆式磁吸附机构的设计与优化[J]. 工程设计学报, 2023, 30(3):334-341.
doi: 10.3785/j.issn.1006-754X.2023.00.031 |
|
|
|
| [10] |
胡晓林, 郭润兰, 黄华, 等. 变曲率立面自适应爬壁机器人结构的设计与分析[J]. 机器人, 2024, 46(5):576-590.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
缪仲翠, 苏乙, 张磊, 等. 梯形Halbach交替极无铁心永磁同步直线电机特性分析与优化设计[J]. 电机与控制学报, 2024, 28(1):164-176.
|
|
|
|
| [15] |
|
| [16] |
闫晨飞, 孙振国, 张文增, 等. 变磁化方向单元组合式永磁吸附装置优化设计[J]. 电工技术学报, 2016, 31(3):188-194.
|
|
|
|
| [17] |
宋玉晶, 张鸣, 朱煜, 等. 基于伪周期的Halbach永磁阵列三维磁场端部效应建模研究[J]. 电工技术学报, 2015, 30(12):162-170.
|
|
|
|
| [18] |
|
| [19] |
黄渭, 朱甲射, 陈咏华, 等. Halbach型永磁吸附装置吸附力计算方法研究[J]. 机电工程, 2019, 36(11):1221-1225,1230.
|
|
|
|
| [20] |
方海峰, 陈锦, 范纪华, 等. Halbach方形阵列吸附机构优化设计[J]. 机械设计与制造, 2021(5):226-230,234.
|
|
|
|
| [21] |
杨培, 张明路, 孙凌宇. 爬壁机器人磁吸附模块设计分析与结构参数优化[J]. 工程设计学报, 2024, 31(5):592-602.
|
|
|
|
| [22] |
赵智浩, 陶友瑞, 裴佳星, 等. 履带式爬壁机器人磁吸附单元的参数分析与优化[J]. 机械强度, 2023, 45(3):626-632.
|
|
|
|
| [23] |
赵光耀, 杨明磊, 钱锋. 基于降方差采样策略的随机重构法[J]. 化工学报, 2024, 75(5):1939-1950.
doi: 10.11949/0438-1157.20231182 |
|
|
|
| [24] |
贾晶晶, 张治民, 于建民, 等. 基于响应面法的轻质尾翼均匀挤压成形数值模拟及模具结构优化[J]. 兵工学报, 2024, 45(6):1824-1839.
doi: 10.12382/bgxb.2023.0187 |
|
|
|
| [25] |
张鑫, 邹德旋, 肖鹏, 等. 自适应简化粒子群优化算法及其应用[J]. 计算机工程与应用, 2019, 55(8):250-263.
doi: 10.3778/j.issn.1002-8331.1809-0183 |
|
doi: 10.3778/j.issn.1002-8331.1809-0183 |
| [1] | ZHEN Hong, XIAO Lijun, DU Chengxin, SONG Weidong. Damage Modes of Ultra-High Molecular Weight Polyethylene Fiber Composite Plates under Ballistic Impact Conditions [J]. Acta Armamentarii, 2025, 46(7): 240725-. |
| [2] | WANG Yizhen, YIN Jianping, ZHANG Xuepeng, YI Jianya, LI Xudong. A Prediction Model for Dynamic Penetration of Shaped Charge Jet [J]. Acta Armamentarii, 2025, 46(6): 240932-. |
| [3] | ZHANG Cong, LU Junhua, YUE Mingkai. Design and Simulation of Bionic Composite Shock Absorption Structure for Imaging Fuze [J]. Acta Armamentarii, 2025, 46(2): 240021-. |
| [4] | GAO Maoguo, LIU Rui, GUO Yansong, GENG Hengheng, CHEN Pengwan. Dynamic Deformation,Damage and Failure Behaviors of High-entropy HfZrTiTaAl Alloy [J]. Acta Armamentarii, 2025, 46(1): 231183-. |
| [5] | LI Xianghui, ZHANG Xingyu, HU Jiahao, LIU Yang, MA Bohan, WANG Yonggang, JIANG Zhaoxiu. Study on the Large Plasticity Model and Fracture Initiation Model Parameters of AISI 4340 Steel Targets [J]. Acta Armamentarii, 2025, 46(1): 231210-. |
| [6] | ZUO Mingshuo, XU Yuxin, LI Yongpeng, LI Xudong, GUO Delong, YANG Xiang. Dynamic Response of Directional Blast Relief Container Structure for Civil Aircraft under Internal Explosive Loading [J]. Acta Armamentarii, 2024, 45(7): 2383-2392. |
| [7] | JIA Jingjing, ZHANG Zhimin, YU Jianmin, XUE Yong, WU Ang. Numerical Simulation of Uniform Extrusion Forming and Die Structure Optimization of Lightweight Empennage-shaped Component Based on Response Surface Method [J]. Acta Armamentarii, 2024, 45(6): 1824-1839. |
| [8] | YANG Tuo, XIONG Shihui, WANG Jingcheng, ZHAO Xiangrun, WEN Yuquan. Actuation Noise Prediction and Decoupling of Pyrotechnic Separation Nut [J]. Acta Armamentarii, 2024, 45(3): 763-773. |
| [9] | GAO Jian, ZOU Libo, YU Cungui. Numerical Simulation of Coating Spalling on Barrel Based on Phase-field Coupled Cohesive Force Model [J]. Acta Armamentarii, 2024, 45(11): 4081-4093. |
| [10] | TIAN Hengxu, LIN Shengye, LI Hao, WU Yinghao, WANG Maosen, DAI Jinsong. Fatigue Optimization of Sell Extractor Skateboard in a High-firing-speed Automatic Gun Based on Kriging Model [J]. Acta Armamentarii, 2024, 45(10): 3585-3595. |
| [11] | JI Xinbo, LU Weijian, LÜ Chen, WANG Xi, LIAN Zheng, HE Li. Dynamic Deflection Response of Typical Pavement Structure under Different Impact Loads [J]. Acta Armamentarii, 2024, 45(1): 299-311. |
| [12] | LIU Jinchun, WANG Yuying, SUN Ni. Numerical Analysis of Gas Explosion Resistance of Two-way Masonry Walls Strengthened by Spraying Polyurea [J]. Acta Armamentarii, 2023, 44(S1): 138-143. |
| [13] | YUAN Mingzheng, PAN Teng, BIAN Xiaobing, YANG Lei, ZHOU Hongyuan, HUANG Guangyan, ZHANG Hong. Response Characteristics of Curved Fiber Composite Protective Shelter under the action of Explosive Shock Wave [J]. Acta Armamentarii, 2023, 44(12): 3909-3920. |
| [14] | WANG Hao, XU Bin, WANG Shu, XU Yongjie, WU Hao. Explosion Impact Protection Performance of Sandwich Structure with Box-shaped Cores [J]. Acta Armamentarii, 2023, 44(12): 3687-3695. |
| [15] | ZHAO Wenhui, BAI Shihuan, GAO Dayong, LI Xiaowei, DUAN Zhenyun. Thermal-Mechanical Analysis of the Biaxial Stretch of Aviation Glass [J]. Acta Armamentarii, 2023, 44(10): 3187-3194. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||