
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (9): 240903-.doi: 10.12382/bgxb.2024.0903
Previous Articles Next Articles
WU Jing, LIN Jianhua, HUANG Jiong, YANG Zheng, HUANG Feng*( )
)
Received:2024-09-29
Online:2025-09-24
Contact:
HUANG Feng
CLC Number:
WU Jing, LIN Jianhua, HUANG Jiong, YANG Zheng, HUANG Feng. Research on Wide-area Real-time Imaging Algorithm and System for Military Vehicles[J]. Acta Armamentarii, 2025, 46(9): 240903-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Algorithm flow chart
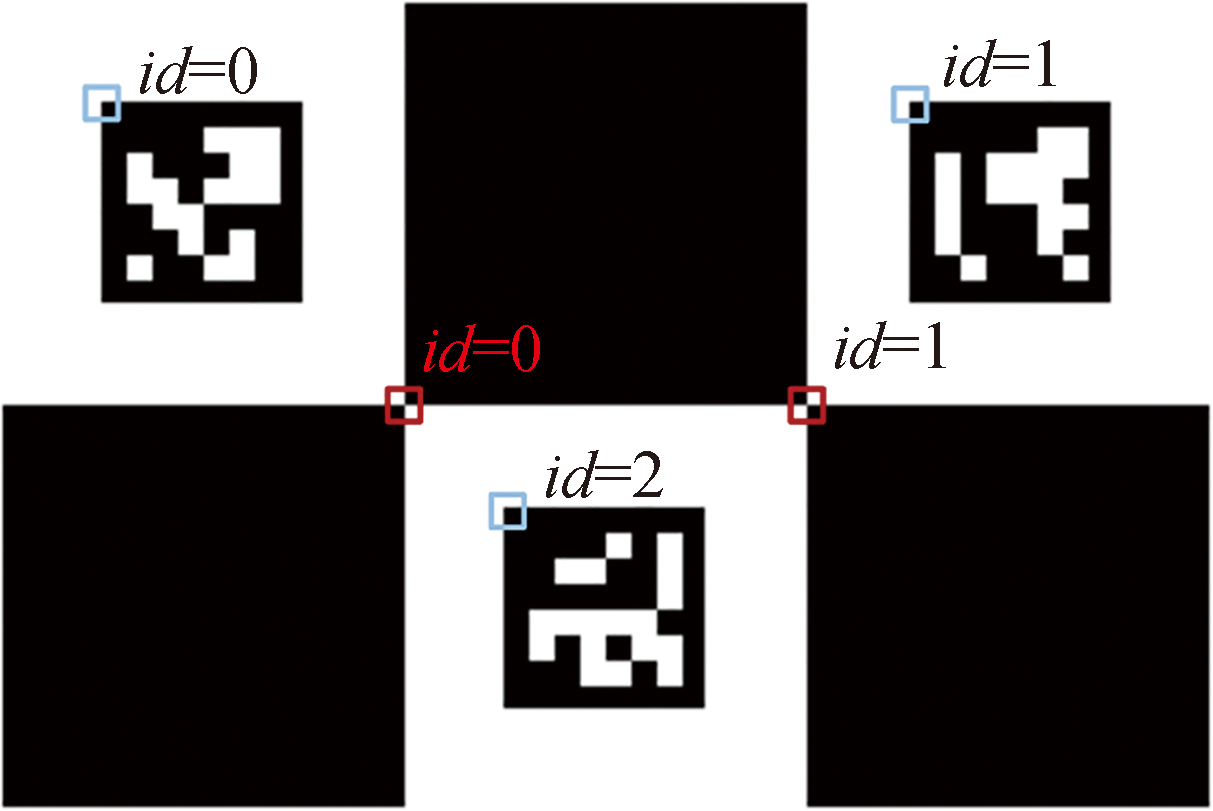
Fig.2 ChArUco board detection example
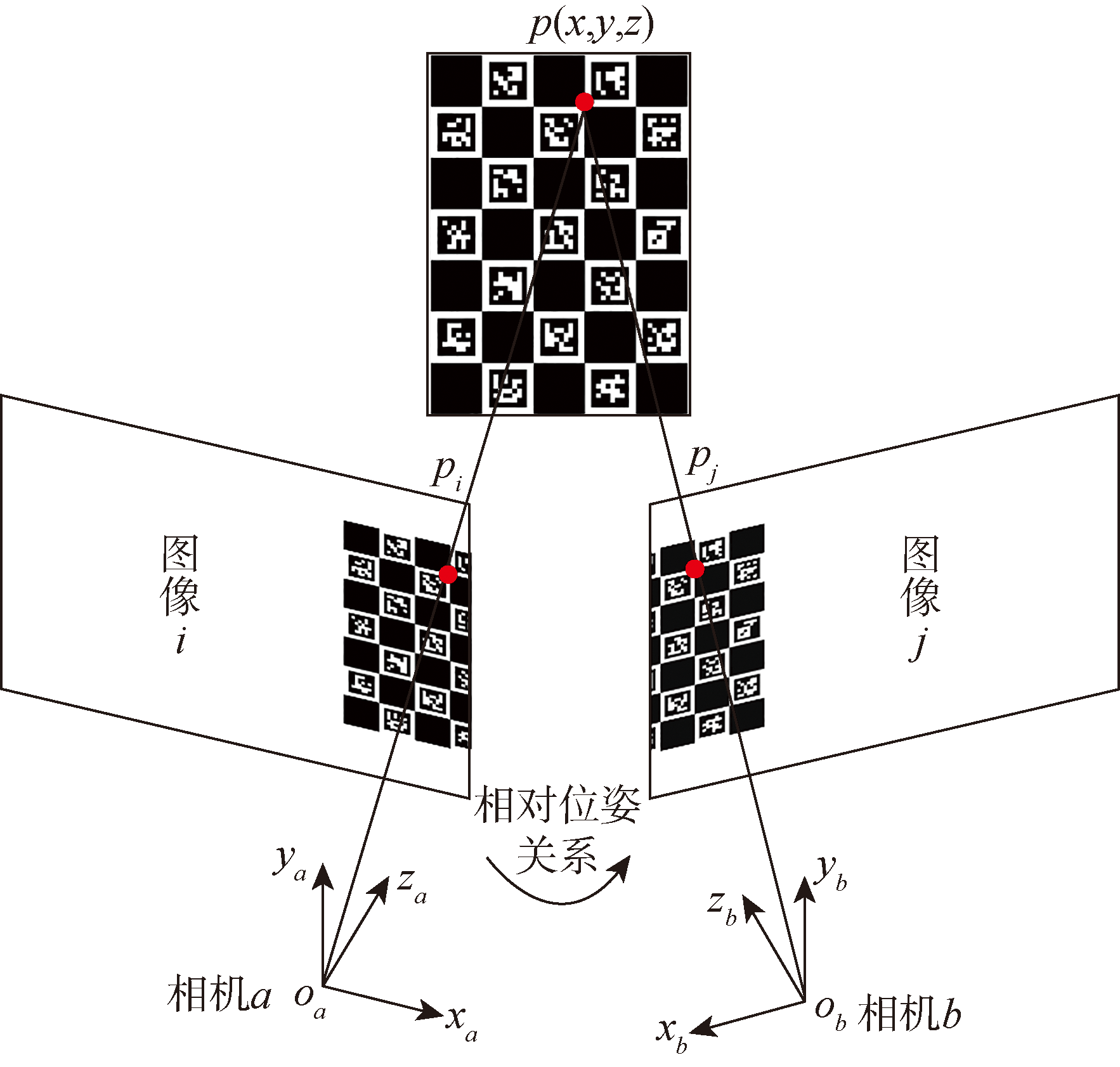
Fig.3 Camera extrinsic calibration model
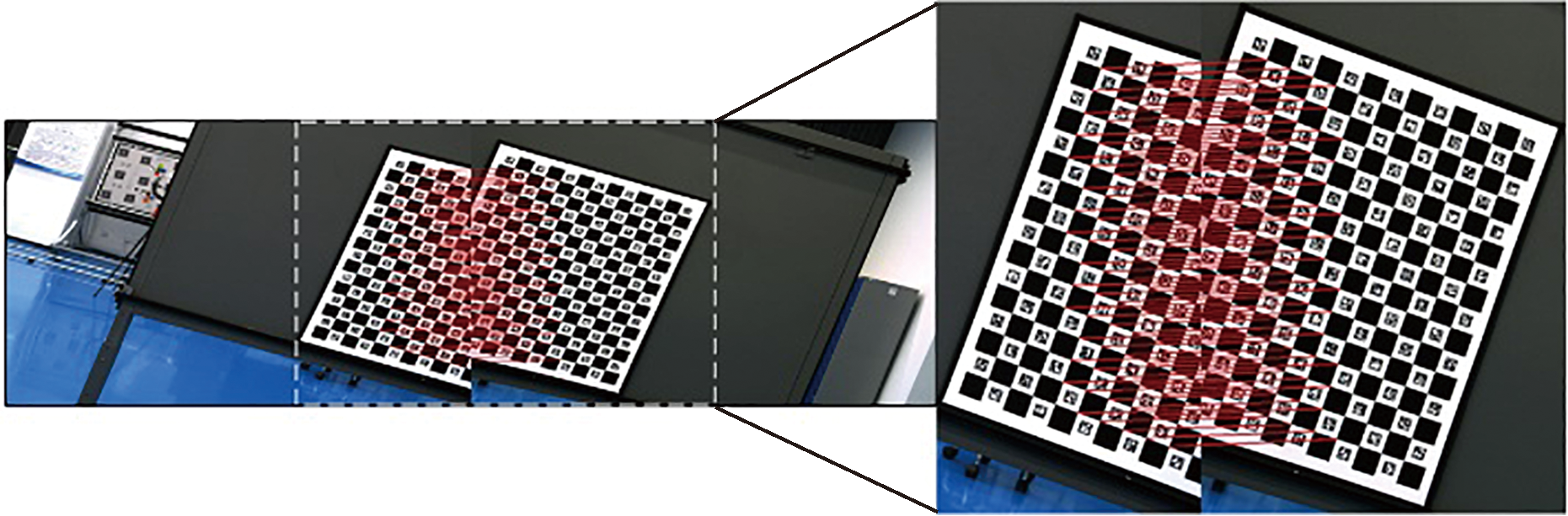
Fig.4 ChArUco corner matching illustration
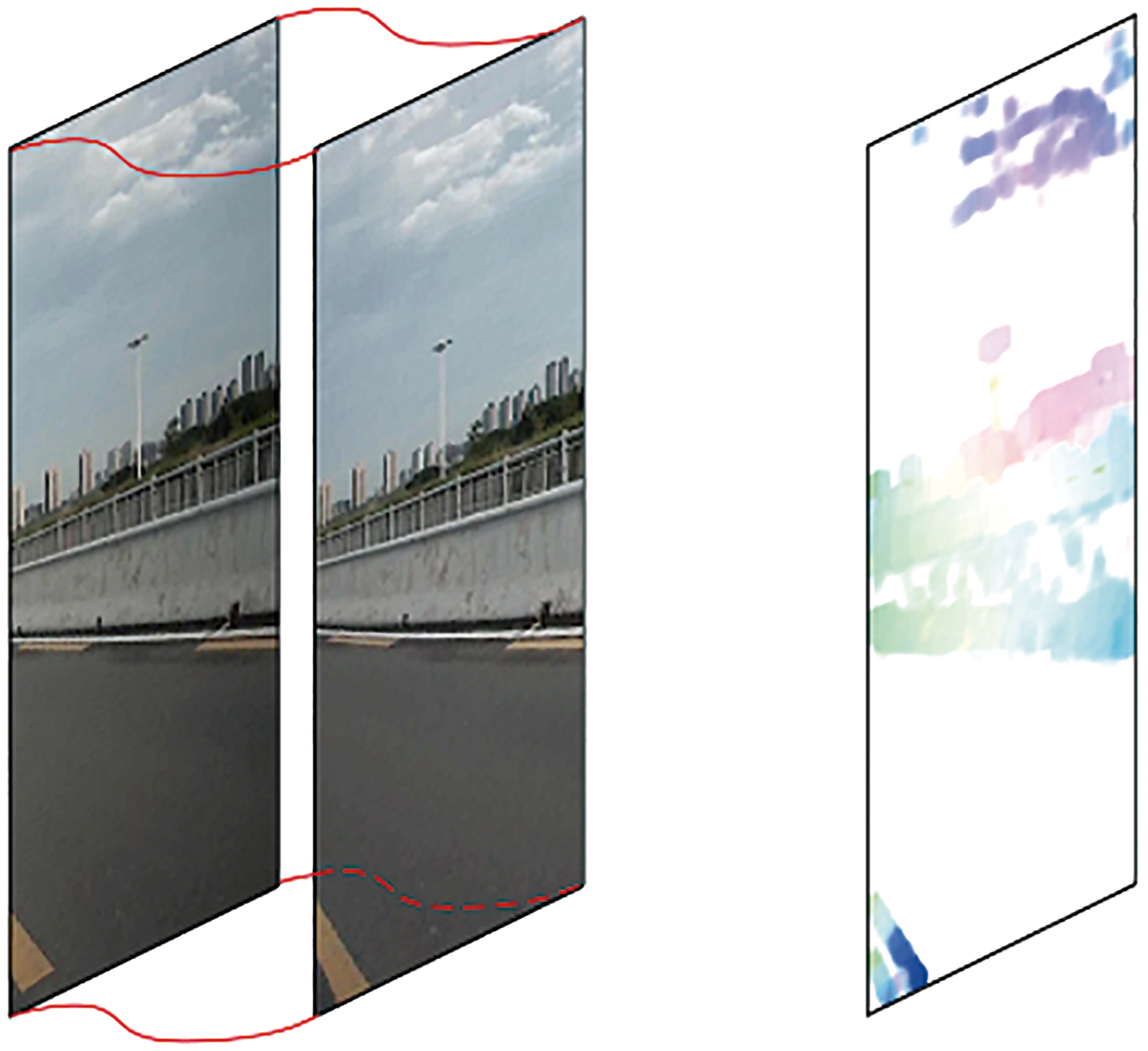
Fig.5 Estimated optical flow relationship(the left is the overlapping area of two adjacent images,and the right is the optical flow relationship of overlapping area of two adjacent images)
| 重叠率/% | 相机摆放 夹角/(°) | 基于特征点检测和 匹配的拼接算法 是否有效 | 本文算法 是否有效 |
|---|---|---|---|
| 30 | 49 | 是 | 是 |
| 20 | 56 | 是 | 是 |
| 15 | 59 | 否 | 是 |
| 10 | 63 | 否 | 是 |
Table 1 Comparison of various algorithms for low overlap rate scenarios
| 重叠率/% | 相机摆放 夹角/(°) | 基于特征点检测和 匹配的拼接算法 是否有效 | 本文算法 是否有效 |
|---|---|---|---|
| 30 | 49 | 是 | 是 |
| 20 | 56 | 是 | 是 |
| 15 | 59 | 否 | 是 |
| 10 | 63 | 否 | 是 |
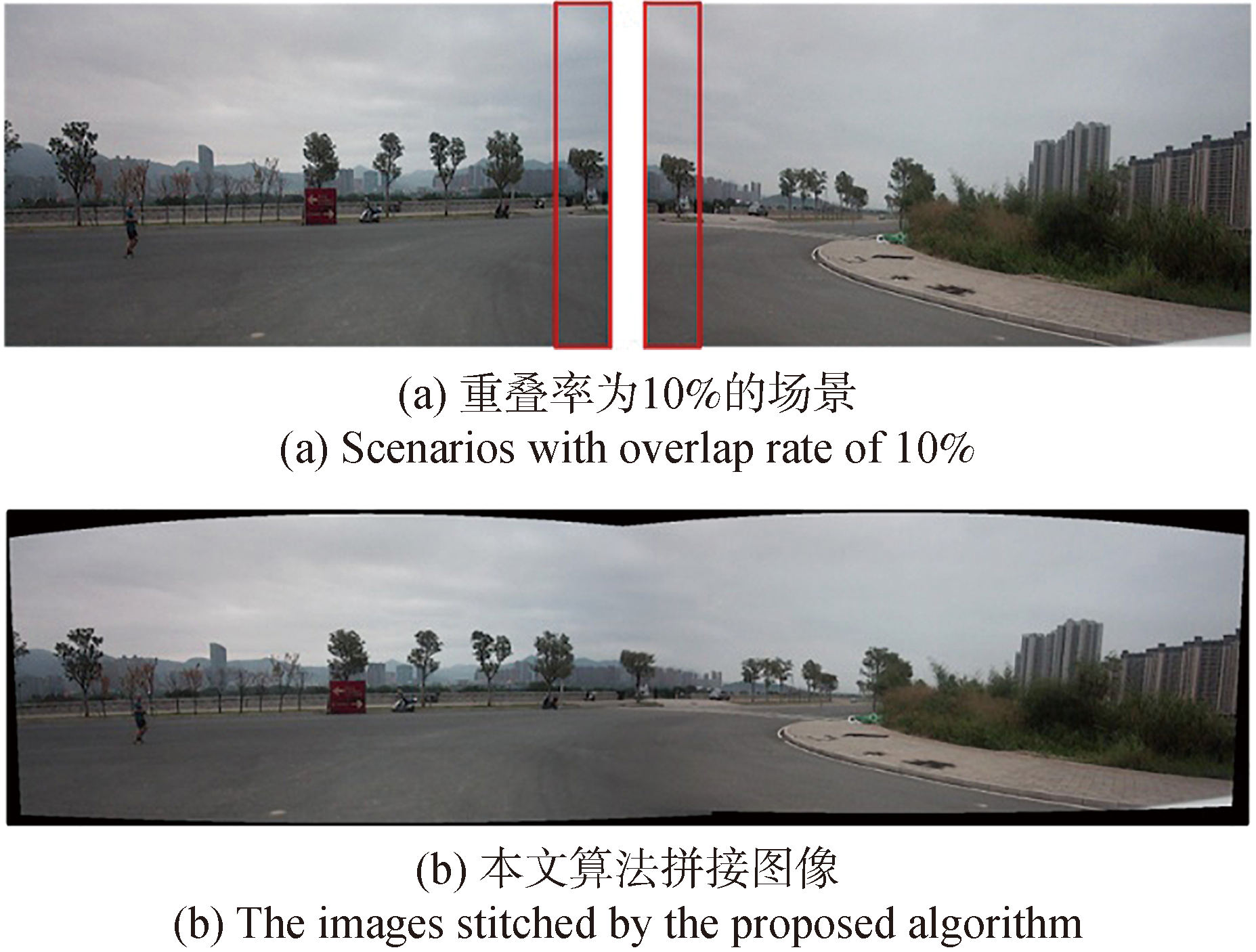
Fig.6 Stitching of scenes with overlap rate of 10%

Fig.7 Validation of the proposed algorithm for feature sparse scenes
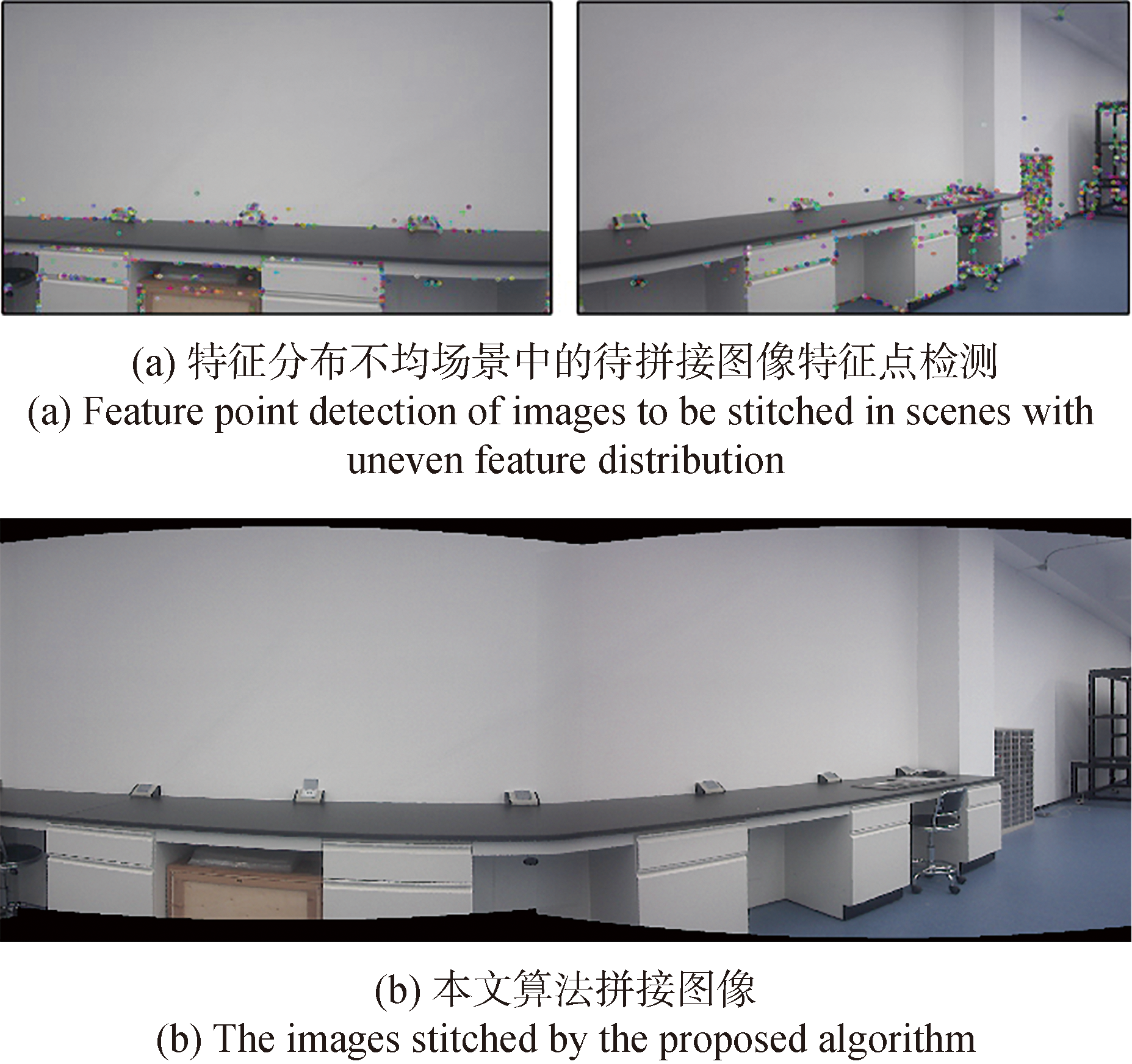
Fig.8 Verification of algorithms in scene with uneven feature distribution

Fig.9 Validation of the algorithm for noise images in low-light scenes
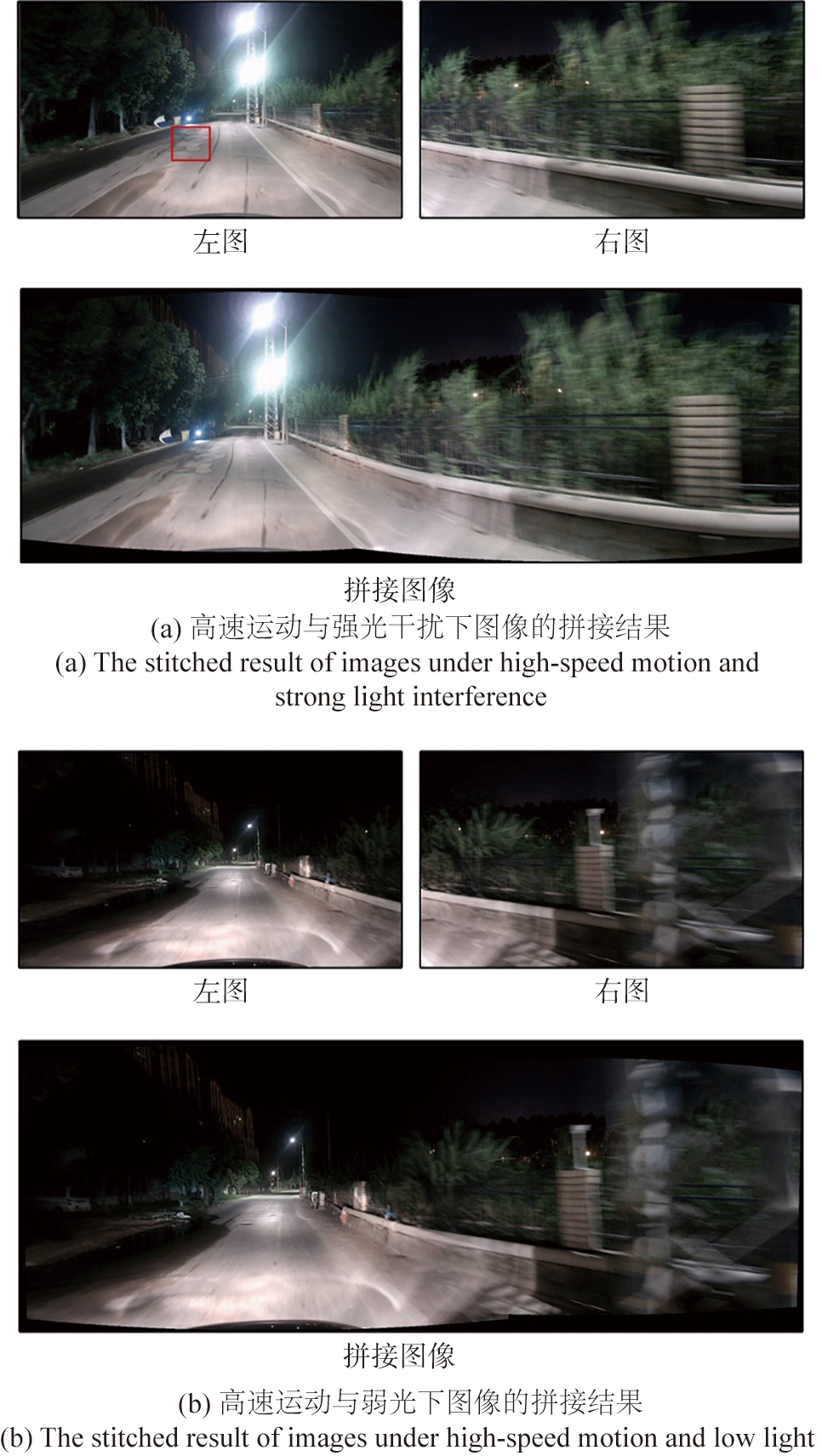
Fig.10 Verification of algorithm in complex dynamic scenarios

Fig.11 Composition of wide-area visual enhancement system
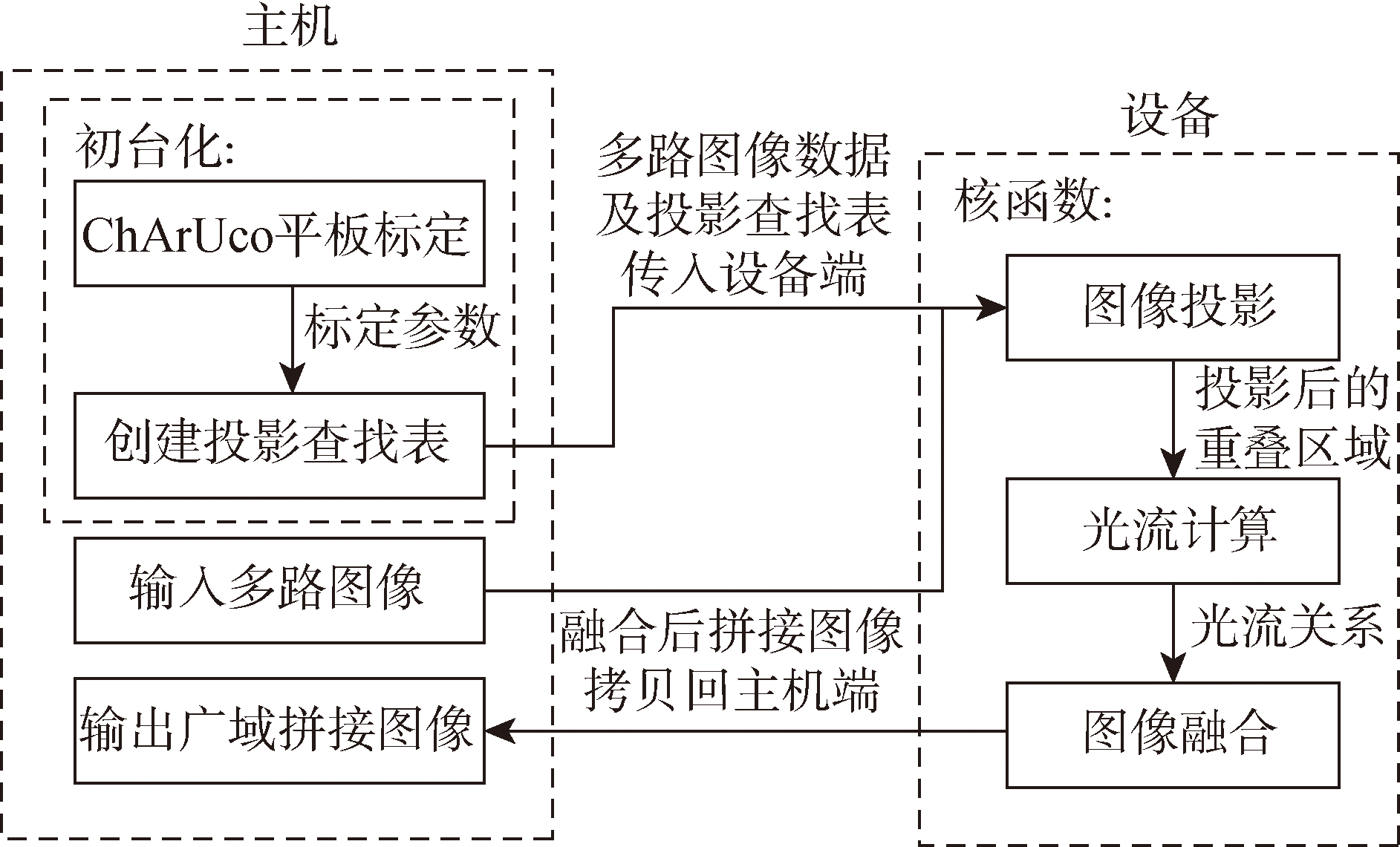
Fig.12 Optimized and accelerated process of the algorithm
| 算法步骤 | 优化前耗时/ms | 优化后耗时/ms | 加速比 |
|---|---|---|---|
| 数据传入设备端 | 3.12 | ||
| 图像投影 | 17.12 | 3.23 | 5.30 |
| 光流计算 | 105.57 | 14.73 | 7.17 |
| 图像融合 | 20.41 | 3.34 | 6.11 |
| 数据传回主机端 | 2.51 | ||
| 总体耗时 | 143.10 | 26.93 | 5.31 |
Table 2 Comparison of time consumptions before and after algorithm optimization and acceleration
| 算法步骤 | 优化前耗时/ms | 优化后耗时/ms | 加速比 |
|---|---|---|---|
| 数据传入设备端 | 3.12 | ||
| 图像投影 | 17.12 | 3.23 | 5.30 |
| 光流计算 | 105.57 | 14.73 | 7.17 |
| 图像融合 | 20.41 | 3.34 | 6.11 |
| 数据传回主机端 | 2.51 | ||
| 总体耗时 | 143.10 | 26.93 | 5.31 |

Fig.13 Algorithm and system road experiment 1

Fig.14 Algorithm and system road experiment 2
| 图像 区域 | AutoStitch | APAP | 本文算法 | |||
|---|---|---|---|---|---|---|
| SSIM↑ | PSNR↑ | SSIM↑ | PSNR↑ | SSIM↑ | PSNR↑ | |
| ① | 0.6555 | 17.9066 | 0.6124 | 16.4453 | 0.6841 | 19.1727 |
| ② | 0.7027 | 19.4580 | 0.6288 | 17.9052 | 0.7704 | 21.0269 |
| ③ | 0.7224 | 18.7417 | 0.8017 | 23.3309 | 0.8052 | 23.3833 |
| ④ | 0.7379 | 20.4495 | 0.7294 | 20.0315 | 0.7929 | 23.1795 |
Table 3 Objective data evaluation of various stitching algorithms
| 图像 区域 | AutoStitch | APAP | 本文算法 | |||
|---|---|---|---|---|---|---|
| SSIM↑ | PSNR↑ | SSIM↑ | PSNR↑ | SSIM↑ | PSNR↑ | |
| ① | 0.6555 | 17.9066 | 0.6124 | 16.4453 | 0.6841 | 19.1727 |
| ② | 0.7027 | 19.4580 | 0.6288 | 17.9052 | 0.7704 | 21.0269 |
| ③ | 0.7224 | 18.7417 | 0.8017 | 23.3309 | 0.8052 | 23.3833 |
| ④ | 0.7379 | 20.4495 | 0.7294 | 20.0315 | 0.7929 | 23.1795 |
| [1] |
|
| [2] |
曹昭睿, 郝永平, 刘万成, 等. 紧凑折反式仿生复眼及图像快速拼接识别算法[J]. 兵工学报, 2022, 43(8):1845-1857.
|
|
doi: 10.12382/bgxb.2021.0393 |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
裴红星, 刘金达, 葛佳隆, 等. 图像拼接技术综述[J]. 郑州大学学报(理学版), 2019, 51(4):1-10,29.
|
|
|
|
| [8] |
任海蕾. 基于多相机标定的全景合成方法研究[D]. 西安: 西安电子科技大学, 2019.
|
|
|
|
| [9] |
郑文玲, 钱宏文, 杨文豪, 等. 基于多相机标定的全景实时拼接算法研究[J]. 电子设计工程, 2021, 29(17):165-169.
|
|
|
|
| [10] |
|
| [11] |
黄文文, 彭小红, 李丽圆, 等. 相机标定方法及进展研究综述[J]. 激光与光电子学进展, 2023, 60(16):9-19.
|
|
|
|
| [12] |
段志瑜, 罗哉, 江文松, 等. 基于改进ArUco标签的位姿估计方法[J]. 计量学报, 2024, 45(3):364-371.
|
|
|
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
夏丹, 周睿. 视差图像配准技术研究综述[J]. 计算机工程与应用, 2021, 57(2):18-27.
doi: 10.3778/j.issn.1002-8331.2007-0040 |
|
doi: 10.3778/j.issn.1002-8331.2007-0040 |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
刘杰, 游品鸿, 田明, 等. 基于局部投影的视差图像拼接平滑优化[J]. 电子学报, 2022, 50(6):1451-1456.
doi: 10.12263/DZXB.20200664 |
|
doi: 10.12263/DZXB.20200664 |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||