
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (8): 240954-.doi: 10.12382/bgxb.2024.0954
Previous Articles Next Articles
ZHANG Fawang1, CHEN Liangfa2, DUAN Jingliang2, LIU Hui1, NIE Shida1,*( ), ZHANG Chen1
), ZHANG Chen1
Received:2024-10-15
Online:2025-08-28
Contact:
NIE Shida
CLC Number:
ZHANG Fawang, CHEN Liangfa, DUAN Jingliang, LIU Hui, NIE Shida, ZHANG Chen. Bi-level Strategy Trajectory Tracking Control of Multi-axle Articulated Wheeled Vehicle[J]. Acta Armamentarii, 2025, 46(8): 240954-.
Add to citation manager EndNote|Ris|BibTeX
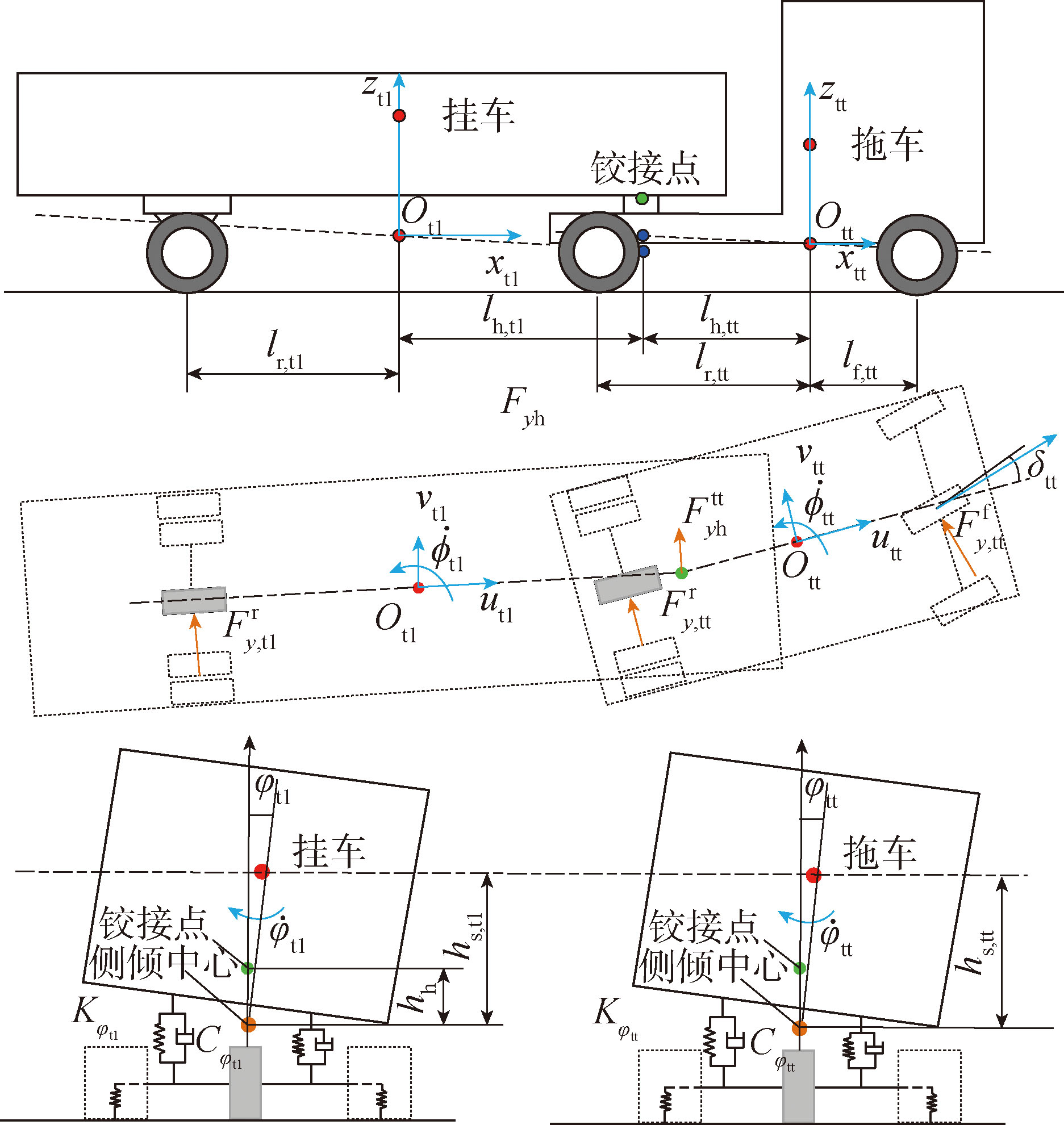
Fig.1 Force analysis of multi-axle articulated wheeled vehicle
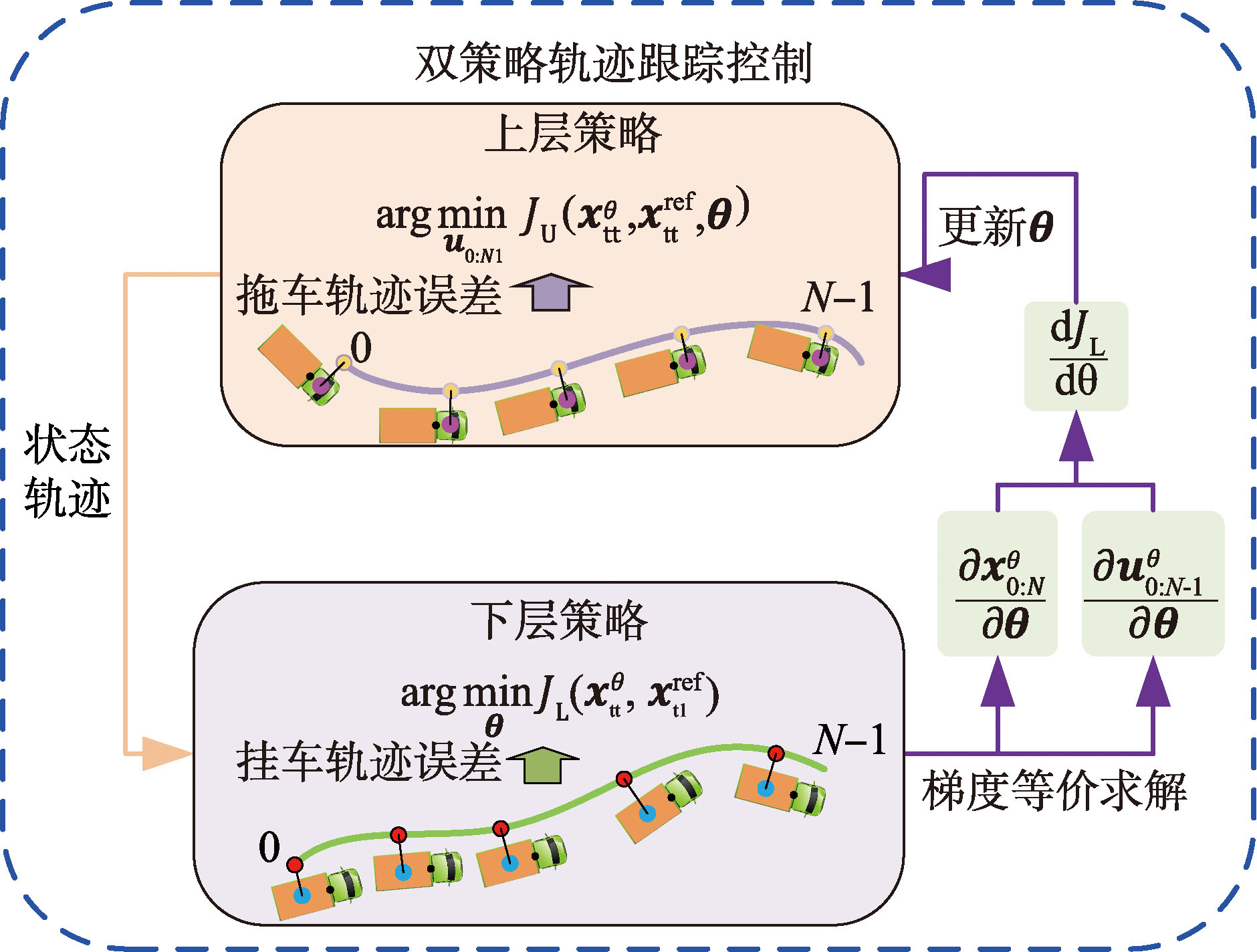
Fig.2 Bi-level strategy trajectory tracking control
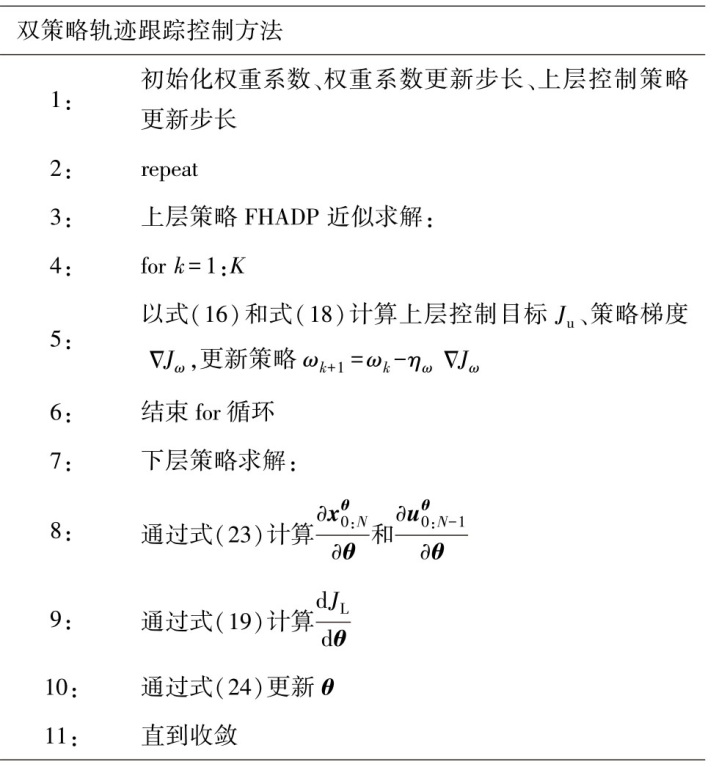
Fig.3 Method pseudo-code
| 参数 | 数值 | 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|---|---|
| ηθ | 1×10-5 | N | 100 | M | 20 |
| ηω | 3×10-5 | Δt/s | 0.01 | K | 50000 |
Table 1 Training Parameters
| 参数 | 数值 | 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|---|---|
| ηθ | 1×10-5 | N | 100 | M | 20 |
| ηω | 3×10-5 | Δt/s | 0.01 | K | 50000 |
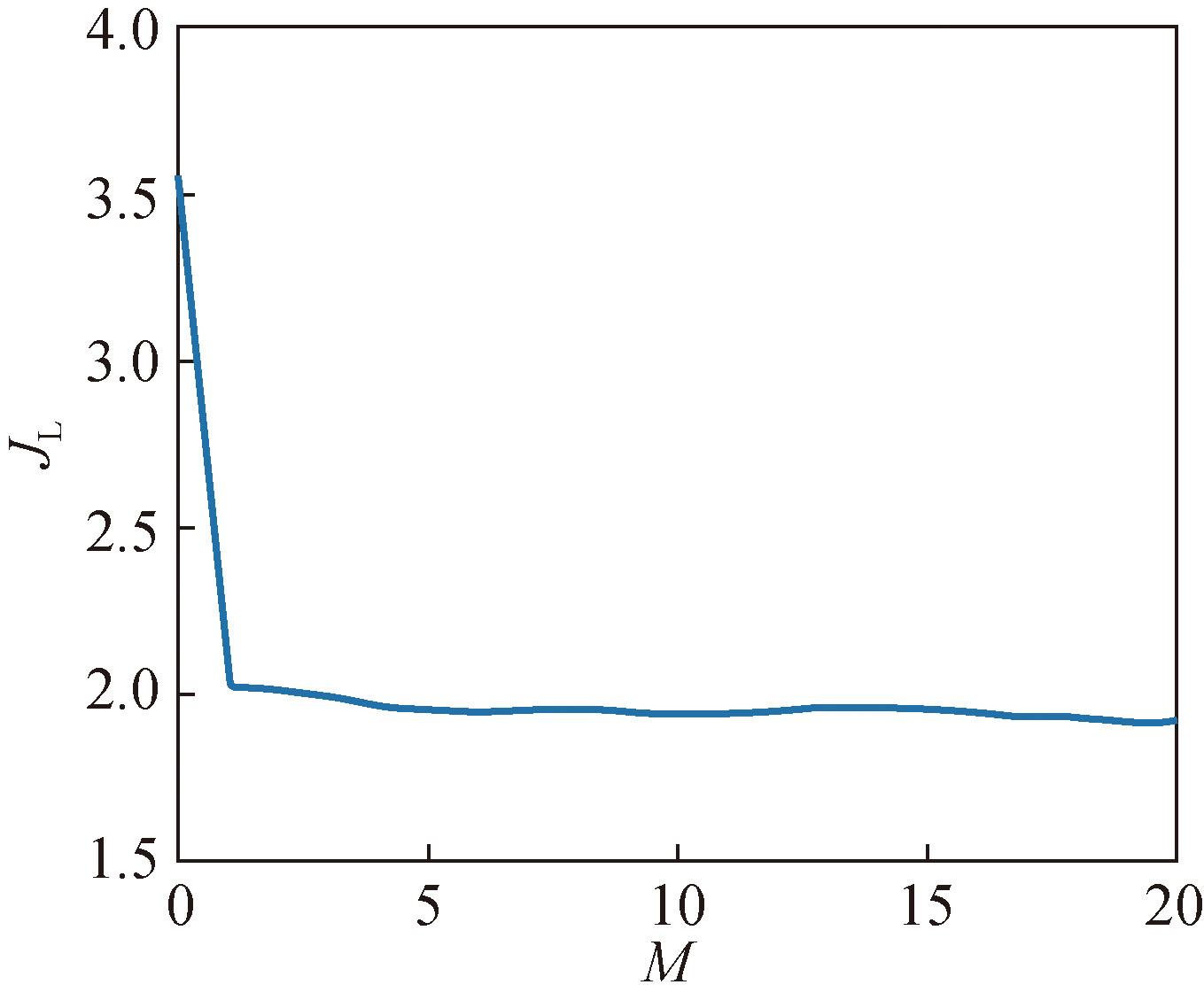
Fig.4 Lower-level strategy control objective function value
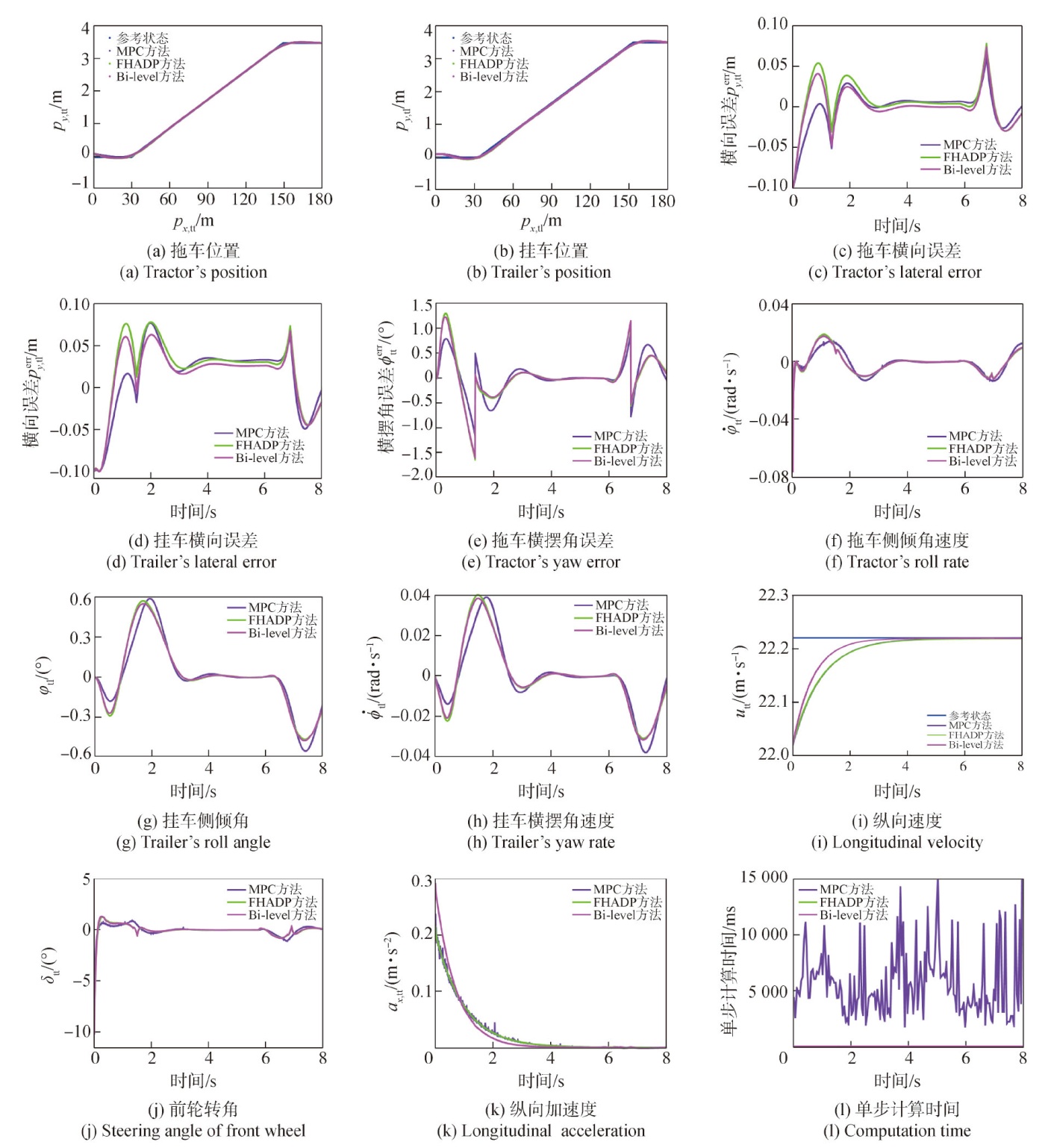
Fig.5 Single lane change state and control curve
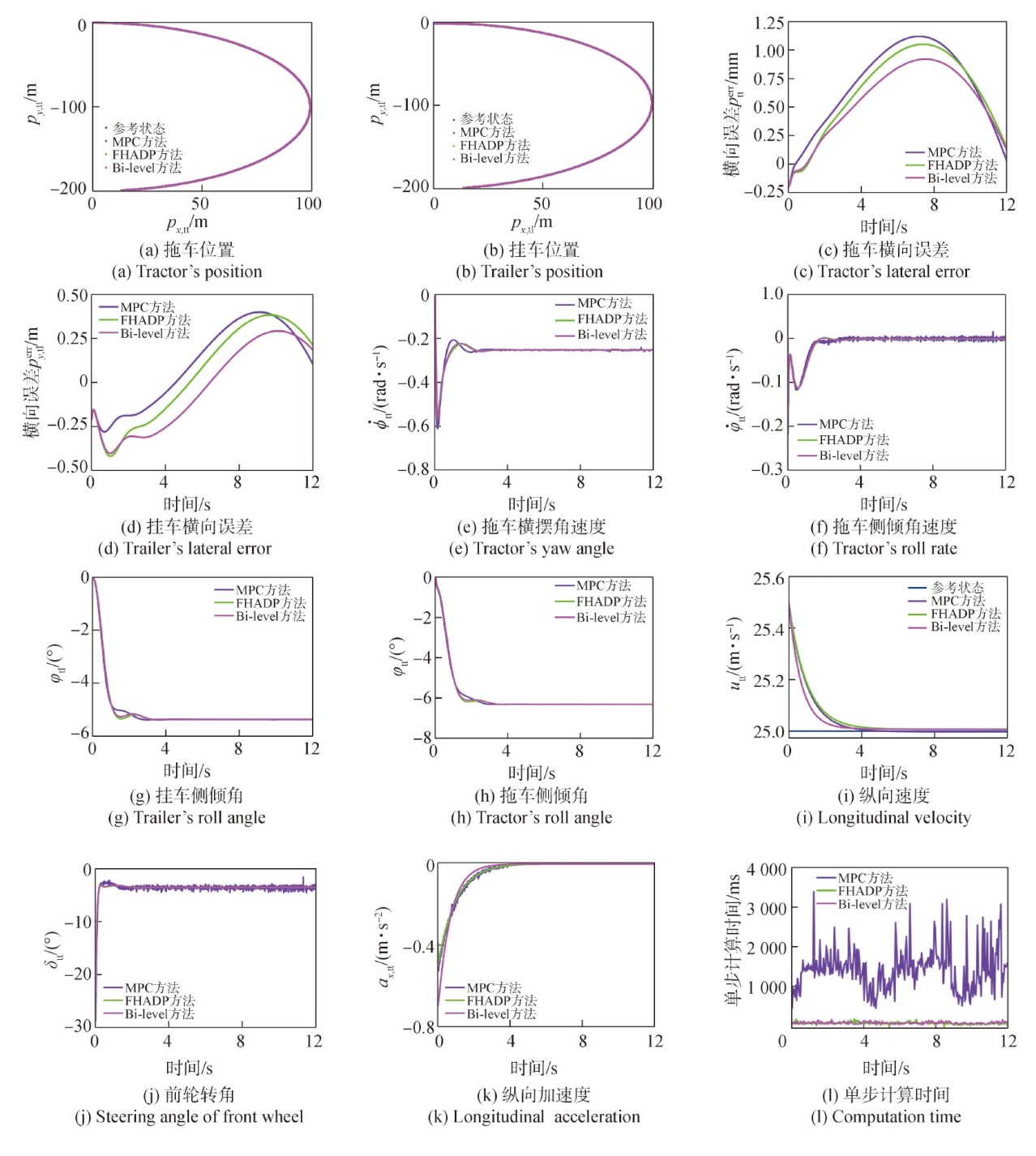
Fig.6 Circular driving state and control curve
| 方法 | 拖车横向 误差/m | 拖车横摆 角误差/(°) | 挂车横向 误差/m | 挂车横摆 角误差/(°) |
|---|---|---|---|---|
| MPC | 0.064 | 1.15 | 0.077 | 1.38 |
| FHADP | 0.078 | 1.61 | 0.078 | 1.32 |
| Bi-level | 0.073 | 1.55 | 0.068 | 1.32 |
Table 2 Maximum error in single lane change
| 方法 | 拖车横向 误差/m | 拖车横摆 角误差/(°) | 挂车横向 误差/m | 挂车横摆 角误差/(°) |
|---|---|---|---|---|
| MPC | 0.064 | 1.15 | 0.077 | 1.38 |
| FHADP | 0.078 | 1.61 | 0.078 | 1.32 |
| Bi-level | 0.073 | 1.55 | 0.068 | 1.32 |
| 工况 | MPC方法 | FHADP方法 | Bi-level方法 |
|---|---|---|---|
| 单车道变换 | 1510.23 | 9.15 | 7.49 |
| 稳态圆周行驶 | 4075.99 | 6.67 | 6.04 |
Table 3 Average calculation time per step for simulation task ms
| 工况 | MPC方法 | FHADP方法 | Bi-level方法 |
|---|---|---|---|
| 单车道变换 | 1510.23 | 9.15 | 7.49 |
| 稳态圆周行驶 | 4075.99 | 6.67 | 6.04 |
| 方法 | 拖车横向误 差/m | 拖车横摆角 误差/(°) | 挂车横向误 差/m | 挂车横摆角 误差/(°) |
|---|---|---|---|---|
| MPC | 1.12 | 6.31 | 0.40 | 4.59 |
| FHADP | 1.05 | 5.73 | 0.42 | 5.16 |
| Bi-level | 0.92 | 5.73 | 0.40 | 4.59 |
Table 4 Maximum absolute errors of vehicle state in circular driving
| 方法 | 拖车横向误 差/m | 拖车横摆角 误差/(°) | 挂车横向误 差/m | 挂车横摆角 误差/(°) |
|---|---|---|---|---|
| MPC | 1.12 | 6.31 | 0.40 | 4.59 |
| FHADP | 1.05 | 5.73 | 0.42 | 5.16 |
| Bi-level | 0.92 | 5.73 | 0.40 | 4.59 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
doi: 10.1016/j.conengprac.2019.01.017 |
| [11] |
|
| [12] |
|
| [13] |
刘聪, 刘辉, 韩立金, 等. 分布式电驱动车辆极限越野环境下高速避障与稳定性控制[J]. 兵工学报, 2021, 42(10):2102-2113.
|
|
doi: 10.3969/j.issn.1000-1093.2021.10.006 |
|
| [14] |
卢佳兴, 刘海鸥, 关海杰, 等. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4):960-971.
|
|
doi: 10.12382/bgxb.2022.0009 |
|
| [15] |
|
| [16] |
李道飞, 查安飞, 徐彪, 等. 半挂汽车列车紧急避撞轨迹跟踪控制算法[J]. 汽车工程, 2022, 44(7):1098-1106.
|
|
|
|
| [17] |
李睿, 项昌乐, 王超, 等. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6):1128-1137.
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
肖礼明, 张发旺, 陈良发, 等. 依托多风格强化学习的车辆轨迹跟踪避撞控制[J]. 汽车工程, 2024, 46(6):945-955.
|
|
|
|
| [23] |
|
| [24] |
|
| [25] |
刘辉, 张发旺, 聂士达, 等. 基于逆模型预测控制的拟人驾驶控制[J]. 汽车工程, 2024, 46(4):596-604.
|
|
|
|
| [26] |
|
| [27] |
国家标准化管理委员会. 道路车辆重型商用汽车列车和铰接客车横向稳定性试验方法:GB/T 25979-2010[S]. 北京: 中国标准出版社, 2010.
|
|
National Standardization Administration Committee. Test methods for lateral stability of heavy commercial vehicle trains and articulated buses for road vehicles:GB/T 25979-2010[S]. Beijing: China Standard Press, 2010. (in Chinese)
|
|
| [28] |
国家标准化管理委员会. 重型汽车操纵稳定性试验通用条件:GB/T 40499-2021[S]. 北京: 中国标准出版社, 2021.
|
|
National Standardization Administration Committee. General conditions for handling stability test of heavy vehicles:GB/T 40499-2021[S]. Beijing: China Standard Press, 2021. (in Chinese)
|
|
| [29] |
全国道路运输标准化技术委员会. 营运车辆抗侧翻稳定性试验方法,稳态圆周试验:JT/T 884-2014[S]. 北京: 中国标准出版社, 2014.
|
|
National Road Transportation Standardisation Technical Committee. Test method for rollover stability of operating vehicles,steady state circumferential test:JT/T 884-2014[S]. Beijing: China Standard Press, 2014. (in Chinese)
|
|
| [30] |
|
| [1] | LI Qin, HE Hongwen, HU Manjiang. Model Predictive Control of Unmanned Vehicle Trajectory Tracking Based on Gaussian Process Regression [J]. Acta Armamentarii, 2025, 46(8): 240904-. |
| [2] | WANG Boyang, LI Xinping, SONG Junjie, GUAN Haijie, LIU Hai’ou, CHEN Huiyan. A Trajectory Tracking Control Method Incorporating Behavior Primitive Optimization and Game Coordination [J]. Acta Armamentarii, 2025, 46(7): 240575-. |
| [3] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [4] | JIA Yifei, JIANG Chaoyang. Dynamic Reconfigurable Adaptive UGV Formation System [J]. Acta Armamentarii, 2024, 45(10): 3654-3673. |
| [5] | ZHOU Hao, BAO Xiaopeng, ZHANG Honggang. Improved Design of Phase Modulation Compensation and Analysis of Disturbance Suppression for UAV Active Disturbance Rejection Control [J]. Acta Armamentarii, 2024, 45(10): 3619-3630. |
| [6] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [7] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| [8] | XU Peng, ZHAO Jianxin, FAN Wenhui, QIU Tianqi, JIANG Lei, LIANG Zhenjie, LIU Yufei. Specific Complex Locomotion Skills Control for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 135-145. |
| [9] | LU Jiaxing, LIU Haiou, GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong. Trajectory Tracking Control of Unmanned Tracked Vehicles Based on Adaptive Dual-Parameter Optimization [J]. Acta Armamentarii, 2023, 44(4): 960-971. |
| [10] | PAN Bo, LI Shengfei, WANG Yang, TAN Senqi, ZHANG Naisi, LUO Tian, CUI Xing. Integrated Control Method of Multi-axle Distributed Driving Unmanned Ground Vehicle in Handling Limit [J]. Acta Armamentarii, 2023, 44(11): 3279-3294. |
| [11] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [12] | WANG Bao-yuan, SHAO Xiao-jun, LIU Peng-ke, HENG Gang, CHAO Hong-xiao, LIU Jun. Research on Measuring Method of Nutation Angle of Projectile Based on Trajectory Tracking with High Speed Photography [J]. Acta Armamentarii, 2016, 37(7): 1312-1316. |
| [13] | DONG Zao-peng, WAN Lei, SUN Yu-shan, LIU Tao, LI Yue-ming, ZHANG Guo-cheng. Trajectory Tracking Control of an Underactuated Unmanned Marine Vehicle Based on Asymmetric Model [J]. Acta Armamentarii, 2016, 37(3): 471-481. |
| [14] | LI Zeng-yan, LI Xiao-min, LIU Qiu-sheng. Trajectory Tracking Algorithm for Motion Compensation of Loitering Munition under Wind Environment [J]. Acta Armamentarii, 2016, 37(12): 2377-2384. |
| [15] | YANG Yong-tai, RONG Ji-li, LI Jian, LIU Bin, HU Cheng-wei. Dynamic Modeling and Control of Space Manipulator with Flexible Joints and Links [J]. Acta Armamentarii, 2014, 35(7): 1003-1008. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||