
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (8): 240647-.doi: 10.12382/bgxb.2024.0647
Previous Articles Next Articles
LI Wenhao1, YU Huilong1,*( ), LU Yuchuan2, REN Yanfei2, XI Junqiang1,**()
), LU Yuchuan2, REN Yanfei2, XI Junqiang1,**()
Received:2024-07-29
Online:2025-08-28
Contact:
YU Huilong, XI Junqiang
LI Wenhao, YU Huilong, LU Yuchuan, REN Yanfei, XI Junqiang. Dynamics Modeling and Simulation of Multi-axle Wheeled Vehicle with Coupled Top Loads[J]. Acta Armamentarii, 2025, 46(8): 240647-.
Add to citation manager EndNote|Ris|BibTeX
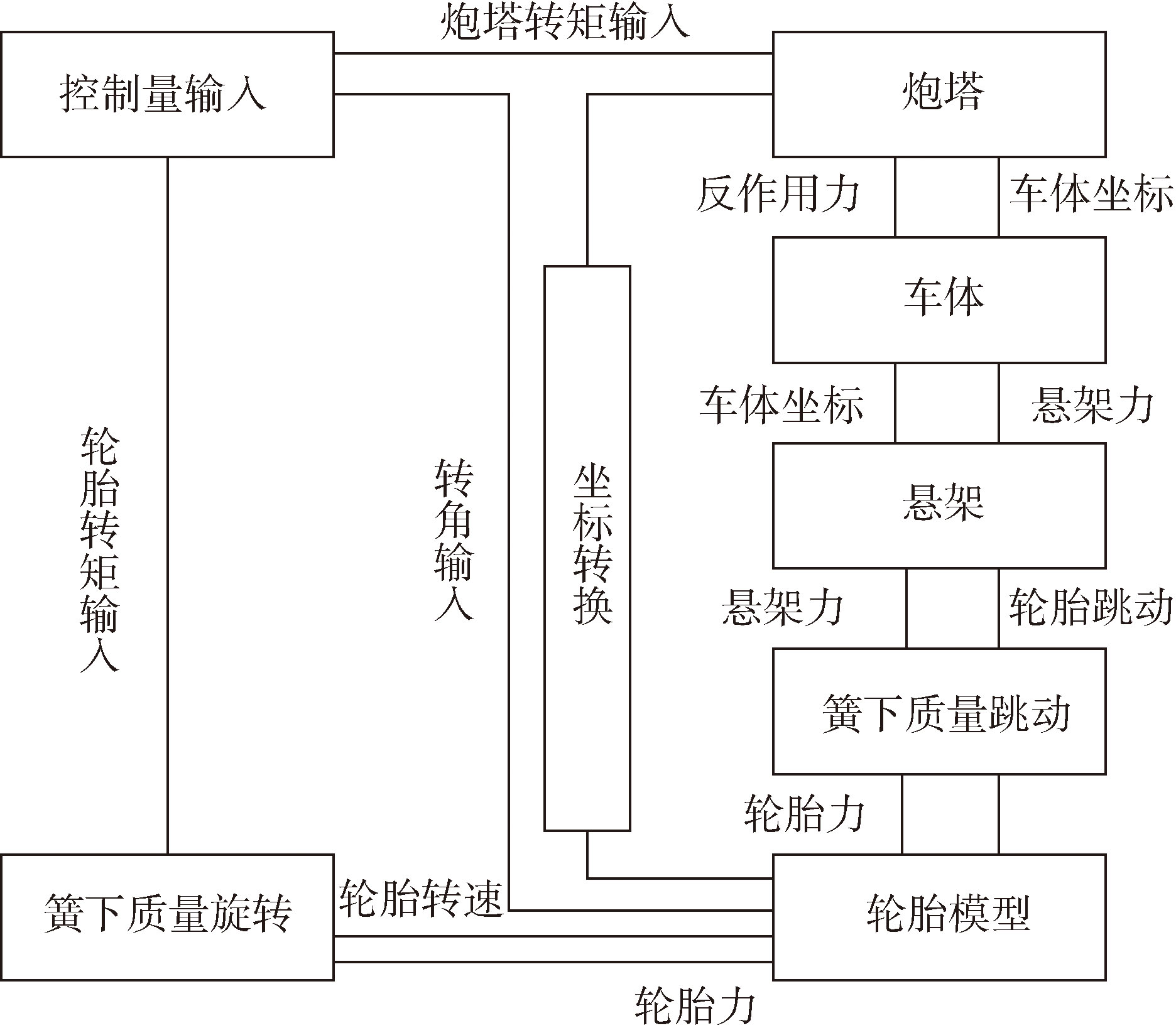
Fig.1 Framework of 8×8 wheeled vehicle model
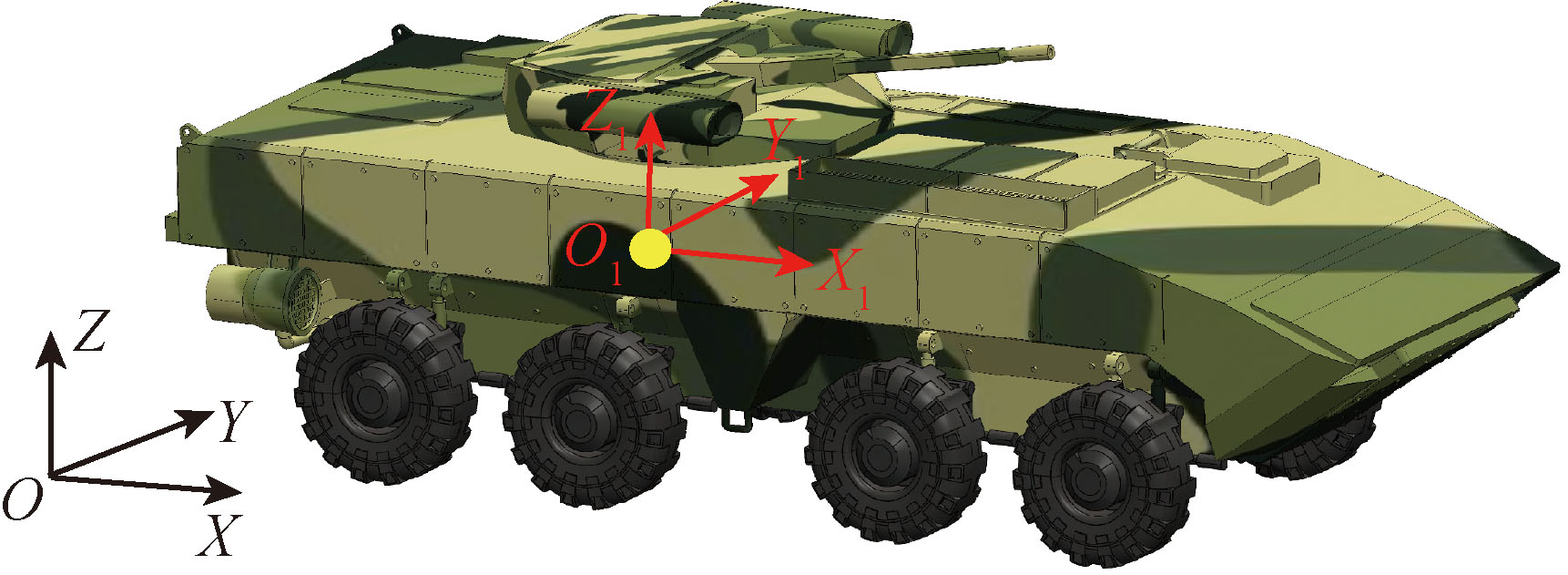
Fig.2 Schematic diagram of 8×8 wheeled vehicle model
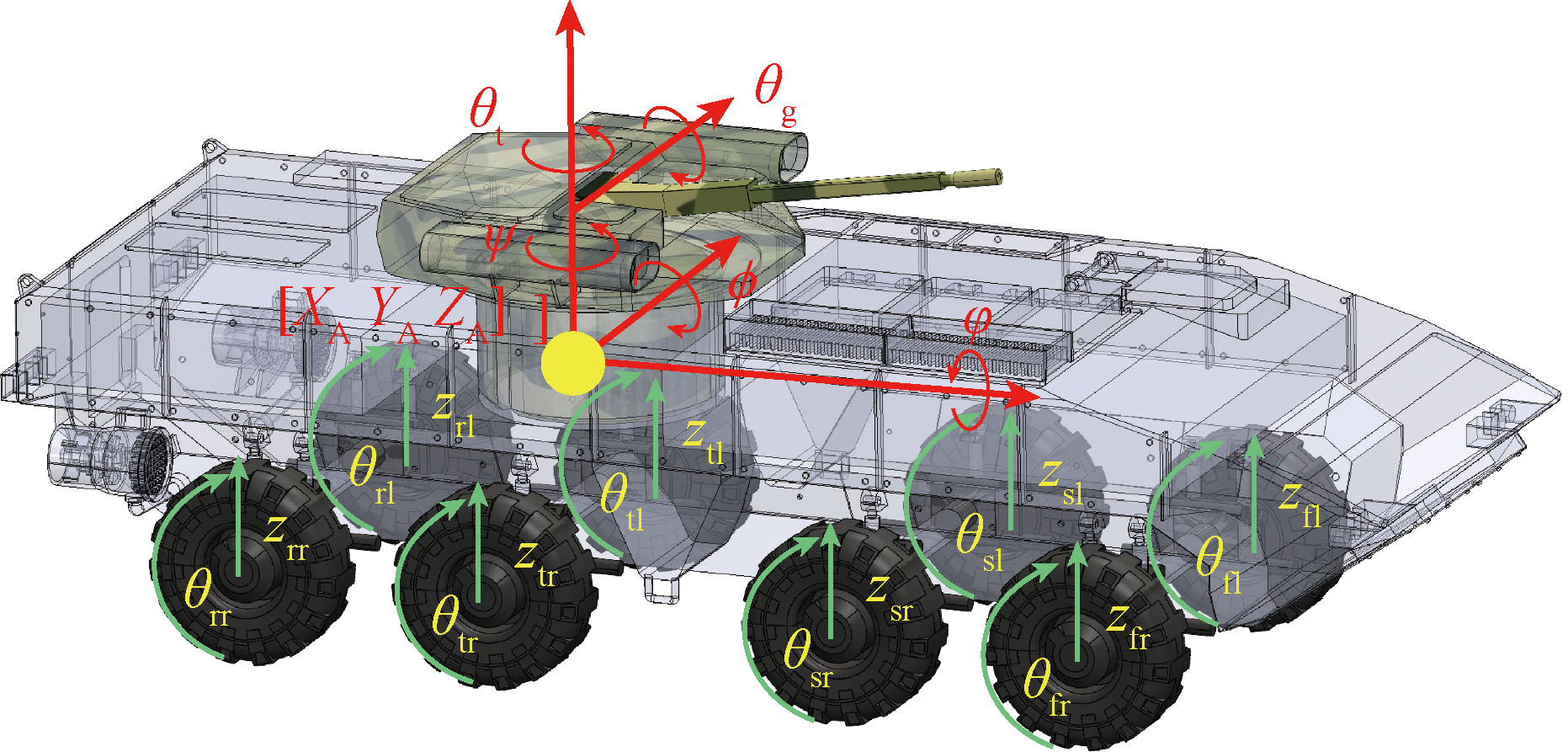
Fig.3 Diagrammatic sketch of 8×8 wheeled vehicle's degree of freedoms
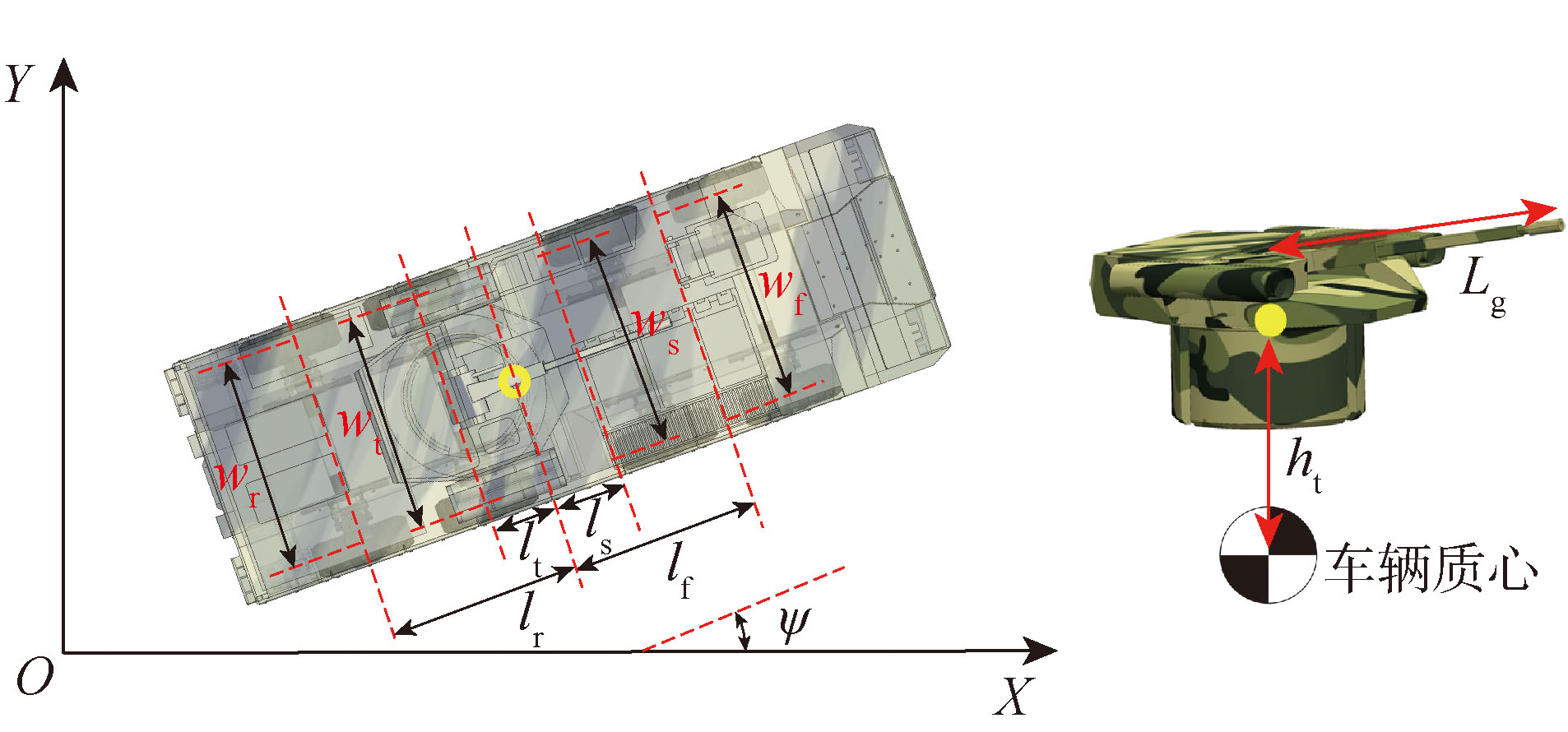
Fig.4 Geometric parameters of 8×8 wheeled vehicle on X-Y plane(the left:the geometric parameters of vehicle body, and the right:the geometric parameters of turret)
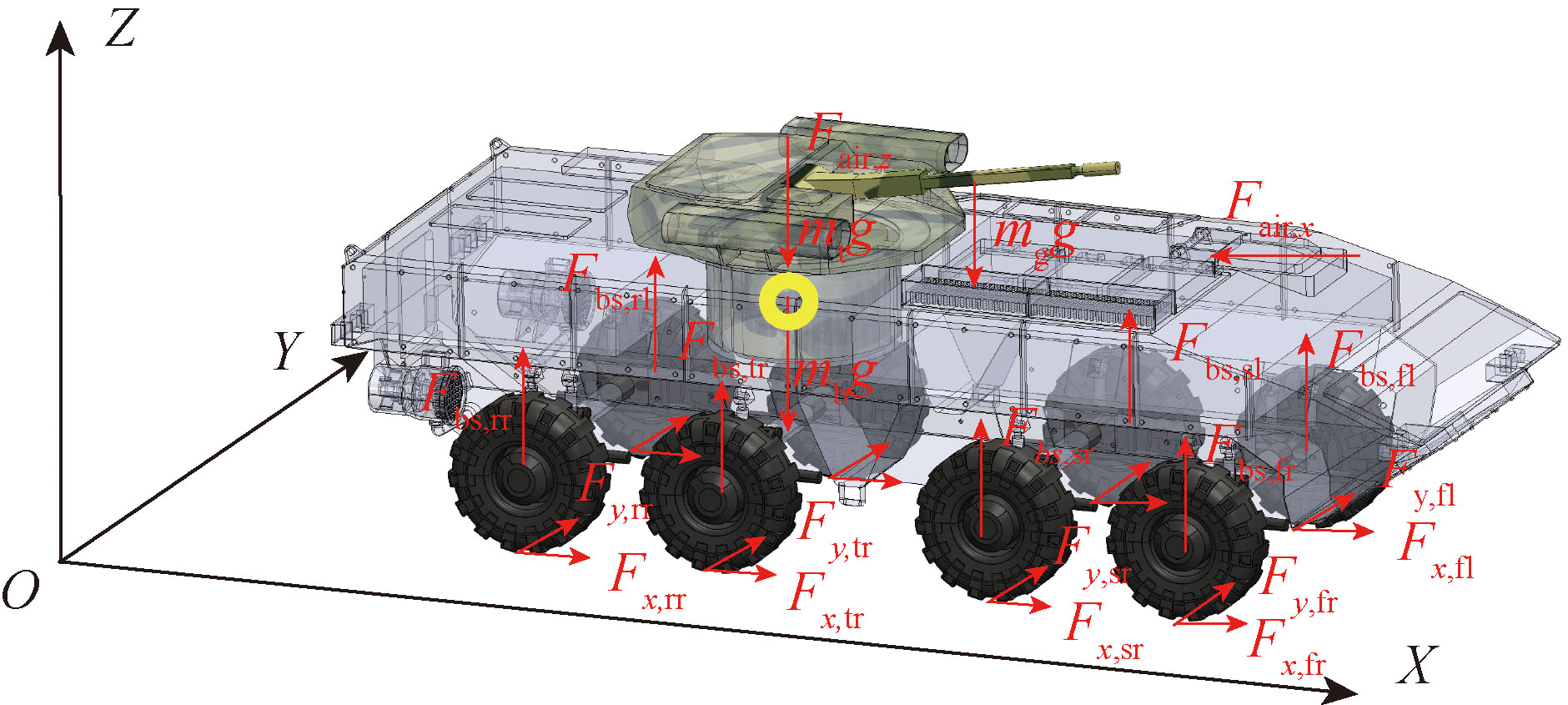
Fig.5 Forces and torques applied on the vehicle
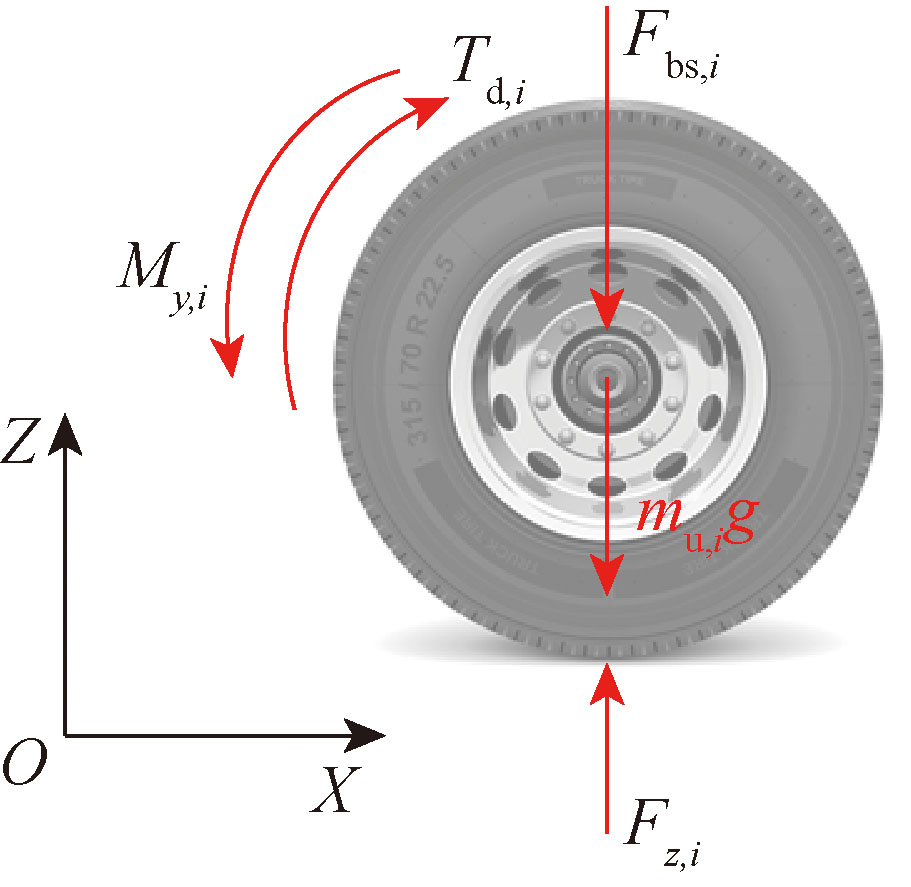
Fig.6 Force and torque applied on the unsprung mass
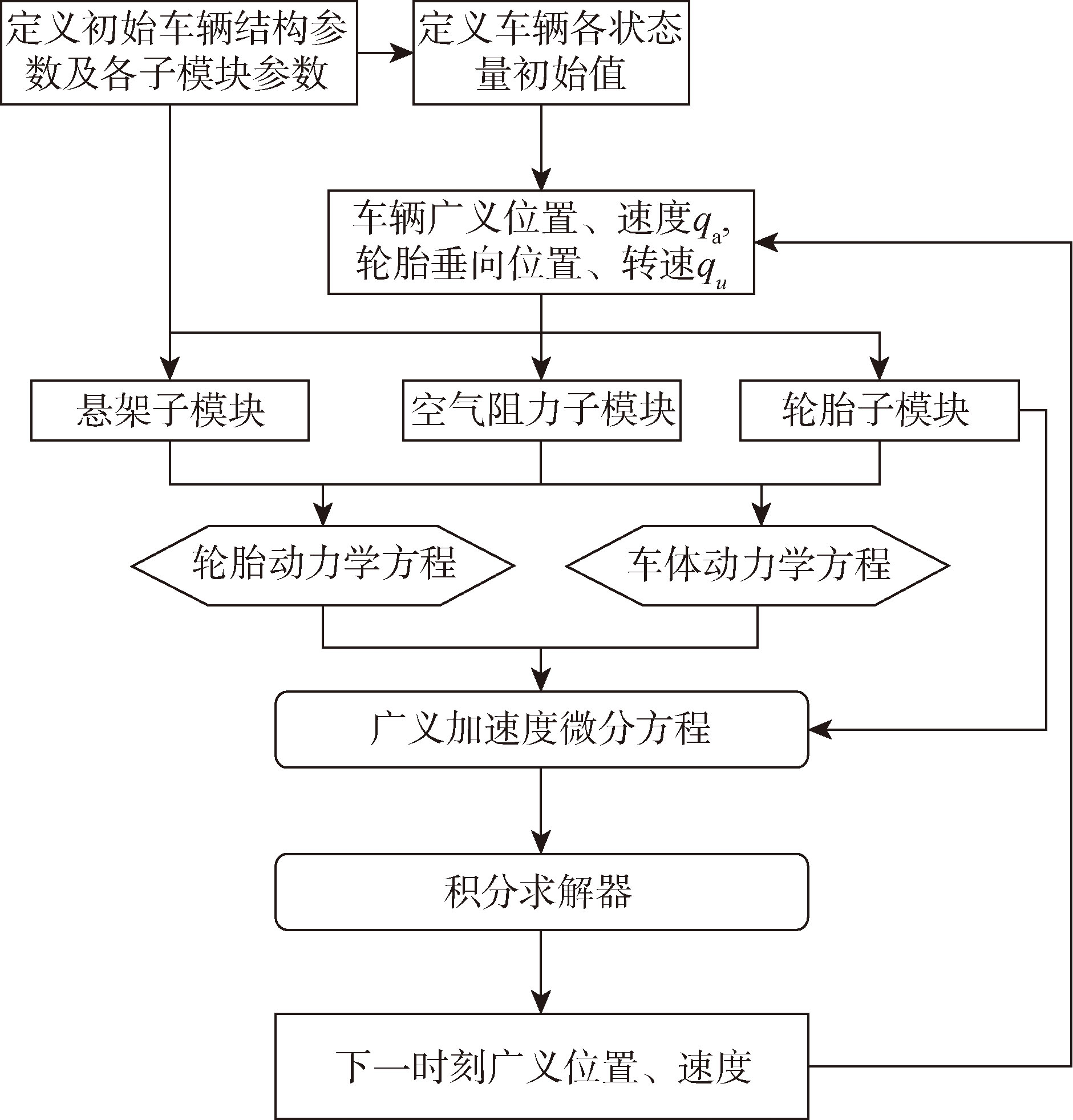
Fig.7 Flowchart of vehicle model solving
| 参数 | 最大绝对值误差 | 误差均方根 |
|---|---|---|
| 纵向速度/(m·s-1) | 9.68×10-4 | 7.96×10-4 |
| 垂向速度/(m·s-1) | 5.92×10-4 | 7.42×10-5 |
| 纵向位移/m | 1.74×10-2 | 1.33×10-2 |
| 纵向加速度/(m·s-2) | 8.74×10-2 | 4.80×10-3 |
| 俯仰角速度/(rad·s-1) | 3.00×10-3 | 2.19×10-4 |
Table 1 Longitudinal variable acceleration error
| 参数 | 最大绝对值误差 | 误差均方根 |
|---|---|---|
| 纵向速度/(m·s-1) | 9.68×10-4 | 7.96×10-4 |
| 垂向速度/(m·s-1) | 5.92×10-4 | 7.42×10-5 |
| 纵向位移/m | 1.74×10-2 | 1.33×10-2 |
| 纵向加速度/(m·s-2) | 8.74×10-2 | 4.80×10-3 |
| 俯仰角速度/(rad·s-1) | 3.00×10-3 | 2.19×10-4 |
| 参数 | 最大绝对值误差 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 7.95×10-2 | 4.3×10-2 |
| 纵向速度/(m·s-1) | 2.64×10-2 | 9.3×10-3 |
| 横向位移/m | 9.70×10-2 | 5.36×10-2 |
| 横向速度/(m·s-1) | 1.46×10-1 | 3.79×10-2 |
Table 2 Step steering maneuver error
| 参数 | 最大绝对值误差 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 7.95×10-2 | 4.3×10-2 |
| 纵向速度/(m·s-1) | 2.64×10-2 | 9.3×10-3 |
| 横向位移/m | 9.70×10-2 | 5.36×10-2 |
| 横向速度/(m·s-1) | 1.46×10-1 | 3.79×10-2 |
| 参数 | 最大绝对值误差 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 2.89×10-1 | 1.21×10-1 |
| 纵向速度/(m·s-1) | 6.35×10-2 | 2.78×10-2 |
| 横向位移/m | 1.38×10-1 | 6.41×10-2 |
| 横向速度/(m·s-1) | 2.24×10-1 | 7.58×10-2 |
Table 3 Double lane change maneuver error
| 参数 | 最大绝对值误差 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 2.89×10-1 | 1.21×10-1 |
| 纵向速度/(m·s-1) | 6.35×10-2 | 2.78×10-2 |
| 横向位移/m | 1.38×10-1 | 6.41×10-2 |
| 横向速度/(m·s-1) | 2.24×10-1 | 7.58×10-2 |
| 类别 | 最大绝对值误差 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 4.66×10-1 | 2.18×10-1 |
| 纵向速度/(m·s-1) | 4.17×10-2 | 2.68×10-2 |
| 横向位移/m | 7.19×10-2 | 4.17×10-2 |
| 横向速度/(m·s-1) | 1.2×10-1 | 6.2×10-2 |
Table 4 Swept sine steering maneuver error
| 类别 | 最大绝对值误差 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 4.66×10-1 | 2.18×10-1 |
| 纵向速度/(m·s-1) | 4.17×10-2 | 2.68×10-2 |
| 横向位移/m | 7.19×10-2 | 4.17×10-2 |
| 横向速度/(m·s-1) | 1.2×10-1 | 6.2×10-2 |
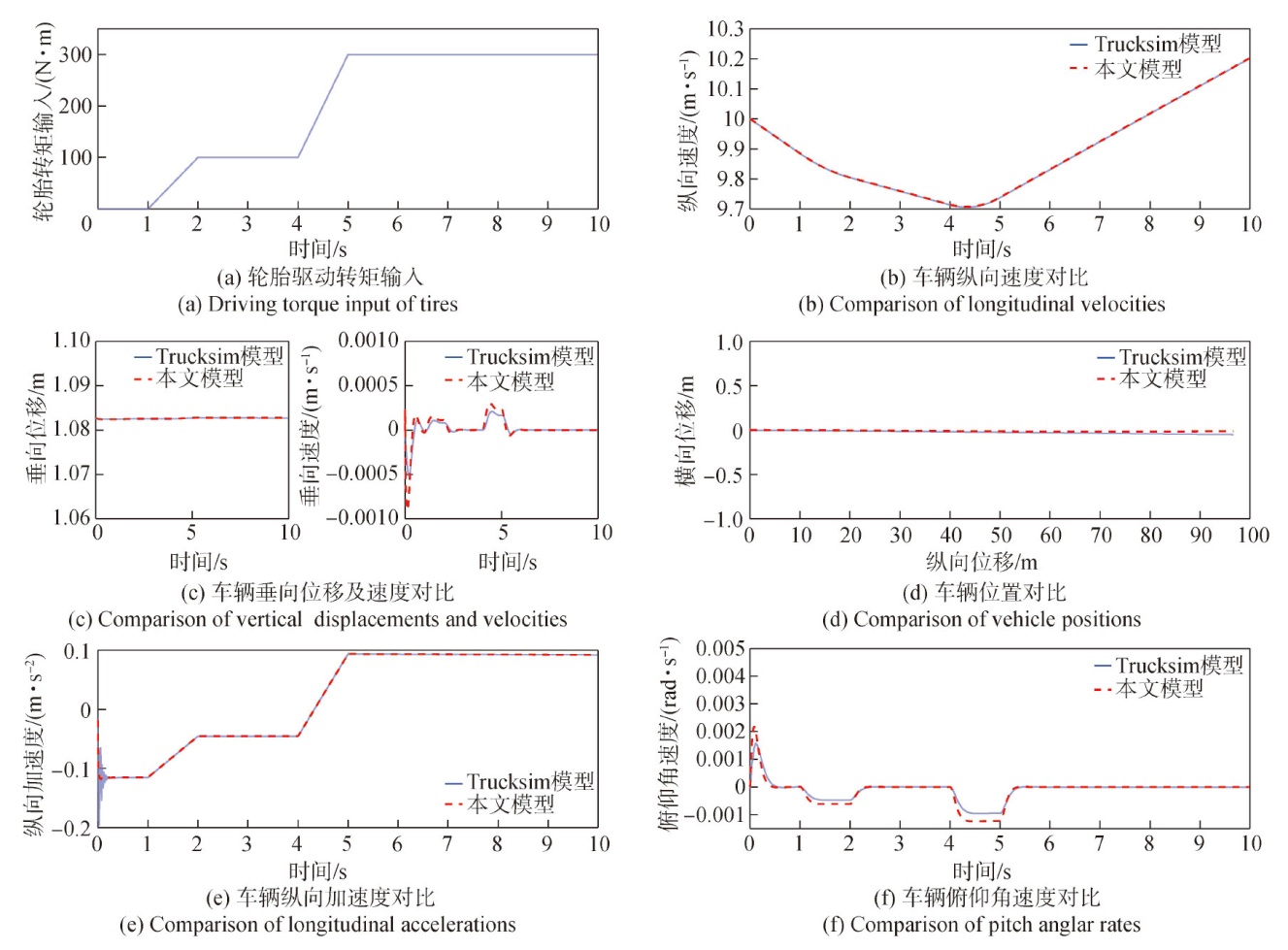
Fig.8 Comparison results of variable accelerations
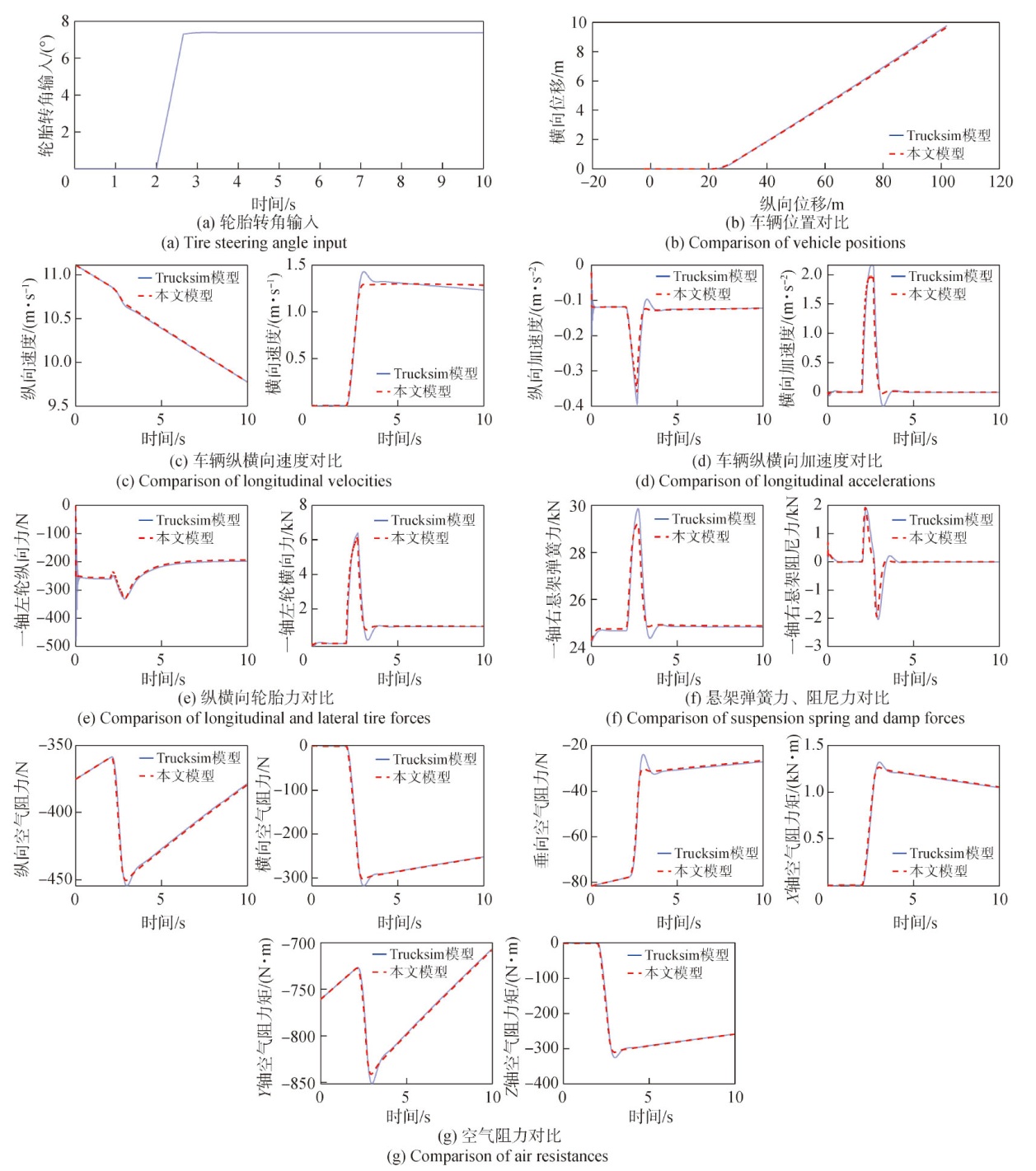
Fig.9 Comparison results of step steer

Fig.10 Compared results of double lane change
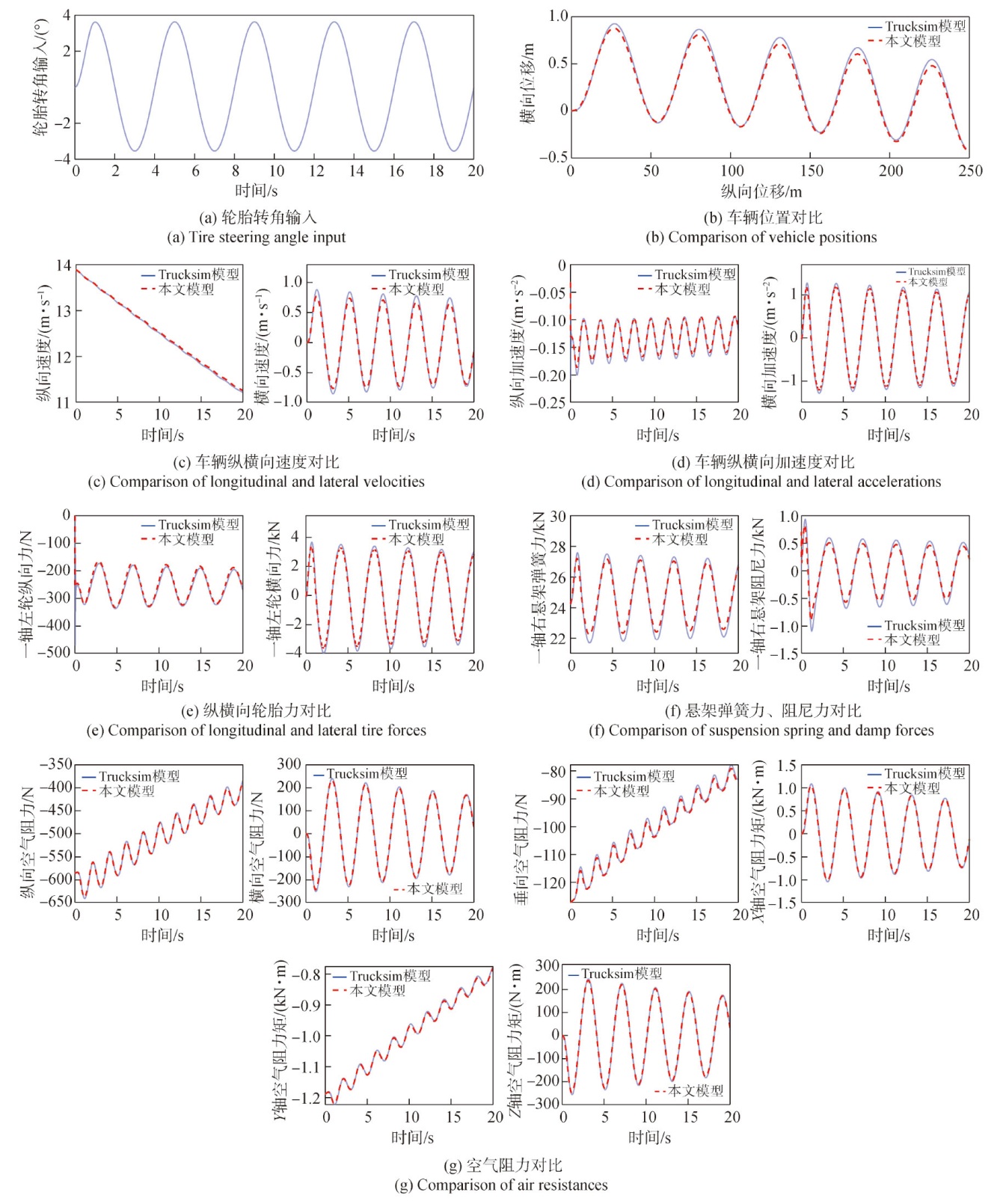
Fig.11 Compared results of sin steer
| [1] |
李嘉麒, 魏曙光, 廖自力, 等. 陆战平台全电化关键技术发展综述[J]. 兵工学报, 2021, 42(10):2049-2059.
doi: 10.3969/j.issn.1000-1093.2021.10.001 |
|
doi: 10.3969/j.issn.1000-1093.2021.10.001 |
|
| [2] |
臧克茂. 陆战平台全电化技术研究综述[J]. 装甲兵工程学院学报, 2011, 25(1):1-7.
|
|
|
|
| [3] |
邹明虎, 刘长江, 彭顺堂, 等. 现代战斗车辆能量体系结构研究[J]. 兵工自动化, 2019, 38(4):15-19.
|
|
|
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
刘明春. 8×8轮毂电机驱动车辆操纵稳定性分析与控制研究[D]. 北京: 北京理工大学, 2015.
|
|
|
|
| [27] |
贾明琛. 8×8分布式轮毂电驱动车辆复合转向系统建模与仿真研究[D]. 北京: 北京理工大学, 2021.
|
|
|
|
| [28] |
叶玉博. 8×8分布式电驱动车辆转向工况驱动力矩分配控制研究[D]. 北京: 北京理工大学, 2019.
|
|
|
|
| [29] |
张猛. 8×8轮毂电机驱动车辆转向稳定性控制策略研究[D]. 北京: 北京理工大学, 2018.
|
|
|
|
| [30] |
刘光远. 8×8分布式驱动车辆直驶稳定性控制策略研究[D]. 北京: 北京理工大学, 2020.
|
|
|
|
| [31] |
|
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||