
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (5): 240549-.doi: 10.12382/bgxb.2024.0549
Special Issue: 蓝色智慧·兵器科学与技术
Previous Articles Next Articles
YAN Xiaojia1, ZHU Huimin1, SUN Shiyan1,*( ), SHI Zhangsong1, JIANG Shang2
), SHI Zhangsong1, JIANG Shang2
Received:2024-07-04
Online:2025-05-07
Contact:
SUN Shiyan
CLC Number:
YAN Xiaojia, ZHU Huimin, SUN Shiyan, SHI Zhangsong, JIANG Shang. An Improved Mutant Firefly Algorithm Optimized Particle Filter Algorithm for UAV Target Positioning[J]. Acta Armamentarii, 2025, 46(5): 240549-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Basic coordinate systems
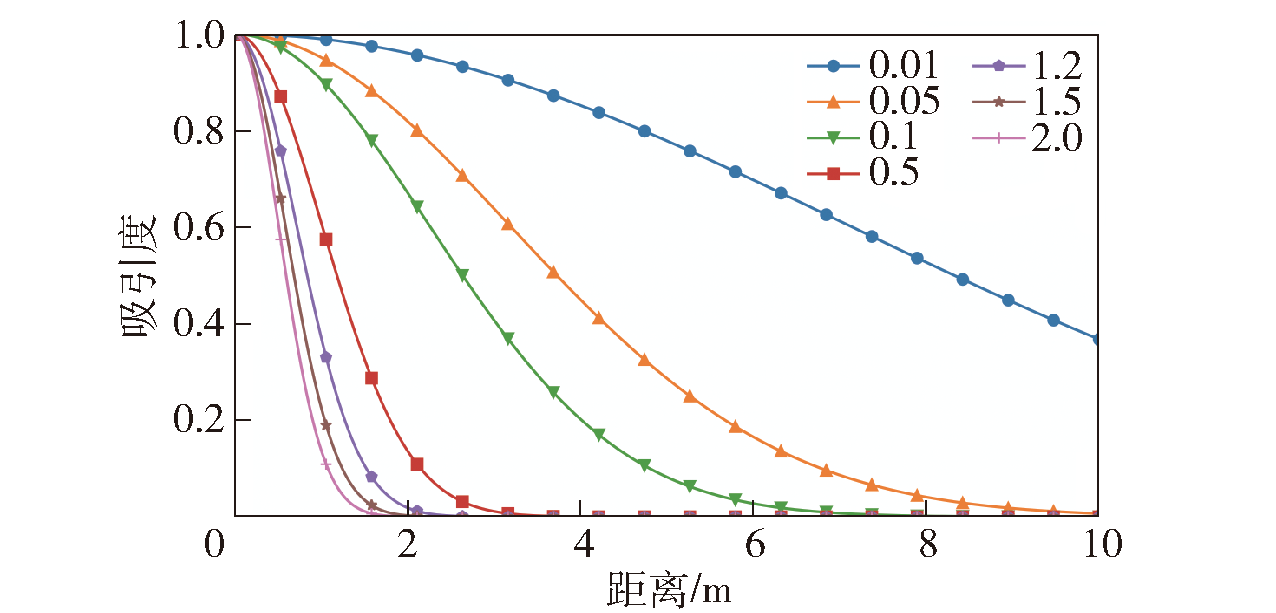
Fig.2 Variation of particle attraction for different light intensity attenuation coefficients
| 各滤波方法 | α | λ | fmin | fmax | εs | Ni | β0 | γ | rj | ρth | k | F |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BAPF | 0.5 | 0.5 | 0 | 2 | ||||||||
| SFA-PF | 0.5 | 10 | 1 | 0.01 | 1 | 0.6 | 1 | |||||
| IMFA-PF | 0.1 | 10 | 0.6 | 1 | 0.5 |
Table 1 Parameter settings for different algorithms
| 各滤波方法 | α | λ | fmin | fmax | εs | Ni | β0 | γ | rj | ρth | k | F |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BAPF | 0.5 | 0.5 | 0 | 2 | ||||||||
| SFA-PF | 0.5 | 10 | 1 | 0.01 | 1 | 0.6 | 1 | |||||
| IMFA-PF | 0.1 | 10 | 0.6 | 1 | 0.5 |

Fig.3 System filter state estimation
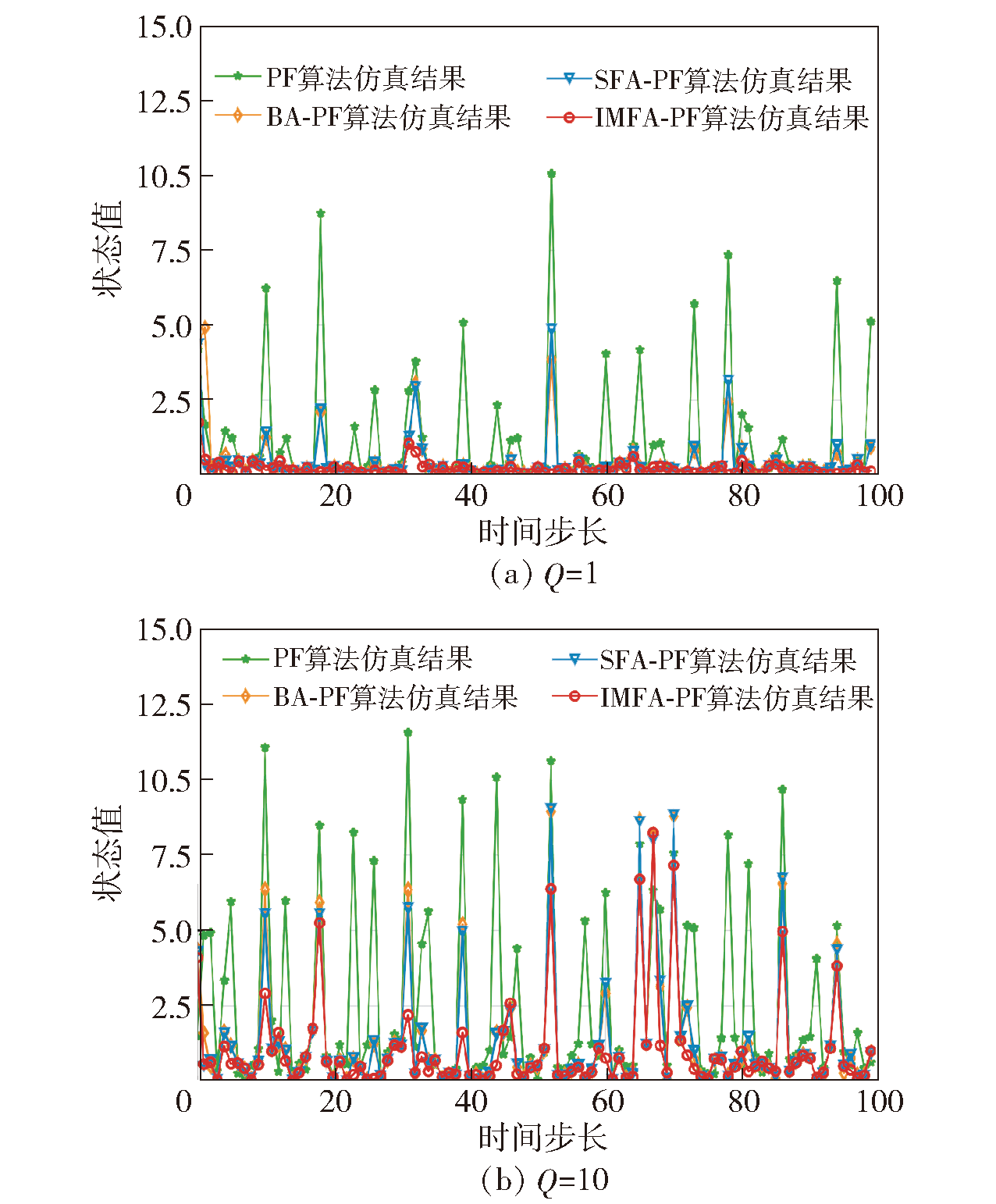
Fig.4 Absolute value of estimation error

Fig.5 Particle distributions at different moments
| 滤波算法 | RMSEmean/m | RMSEvar/m | Tmean/s | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 50 | 100 | 200 | 50 | 100 | 200 | 50 | 100 | 200 | |
| PF | 4.1681 | 3.7164 | 3.5702 | 0.2642 | 0.3028 | 0.0935 | 0.0879 | 0.0936 | 0.1154 |
| BA-PF | 2.9312 | 2.5331 | 2.4170 | 0.0906 | 0.0693 | 0.0742 | 0.1117 | 0.1421 | 0.2132 |
| SFA-FA | 2.2711 | 2.1028 | 2.0057 | 0.0842 | 0.0730 | 0.0704 | 0.1313 | 0.1759 | 0.2698 |
| IMFA-PF | 2.0693 | 1.9371 | 1.9022 | 0.0791 | 0.0734 | 0.0699 | 0.1549 | 0.2037 | 0.3214 |
Table 2 Comparison of simulated results of different PF algorithms
| 滤波算法 | RMSEmean/m | RMSEvar/m | Tmean/s | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 50 | 100 | 200 | 50 | 100 | 200 | 50 | 100 | 200 | |
| PF | 4.1681 | 3.7164 | 3.5702 | 0.2642 | 0.3028 | 0.0935 | 0.0879 | 0.0936 | 0.1154 |
| BA-PF | 2.9312 | 2.5331 | 2.4170 | 0.0906 | 0.0693 | 0.0742 | 0.1117 | 0.1421 | 0.2132 |
| SFA-FA | 2.2711 | 2.1028 | 2.0057 | 0.0842 | 0.0730 | 0.0704 | 0.1313 | 0.1759 | 0.2698 |
| IMFA-PF | 2.0693 | 1.9371 | 1.9022 | 0.0791 | 0.0734 | 0.0699 | 0.1549 | 0.2037 | 0.3214 |

Fig.6 Test flight experimental systems and flight paths
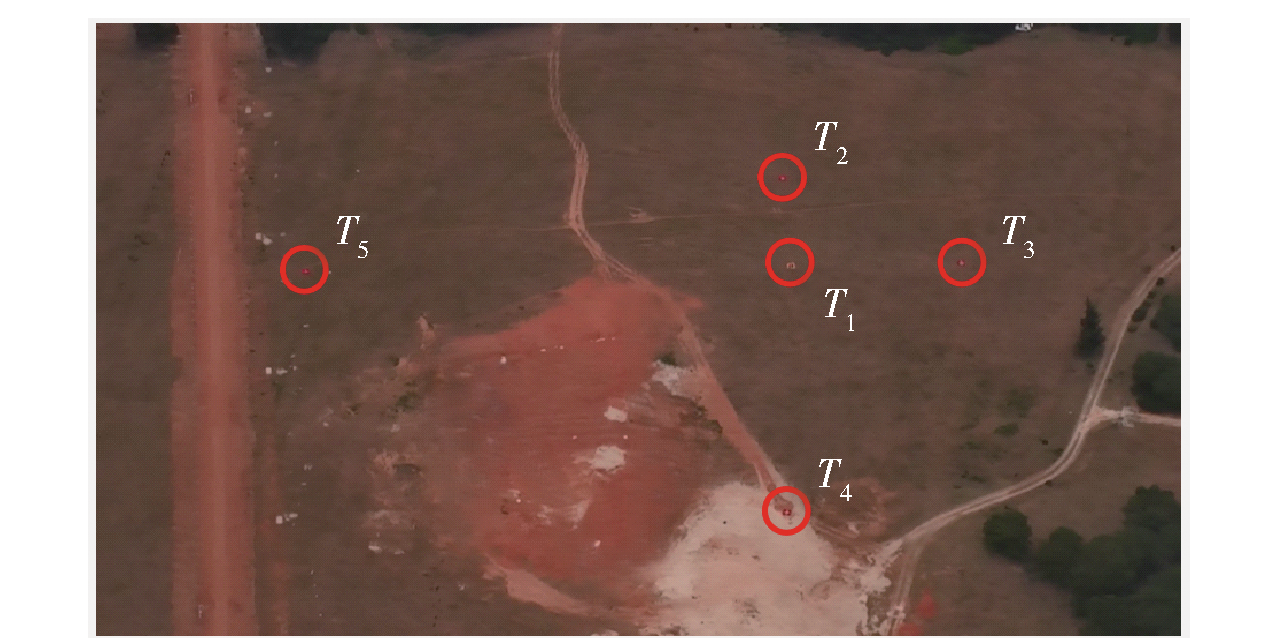
Fig.7 Imaging of UAVs

Fig.8 Measured results of PF and IMFA-PF algorithm (N=50)

Fig.9 Measured results of PF and IMFA-PF algorithm (N=500)
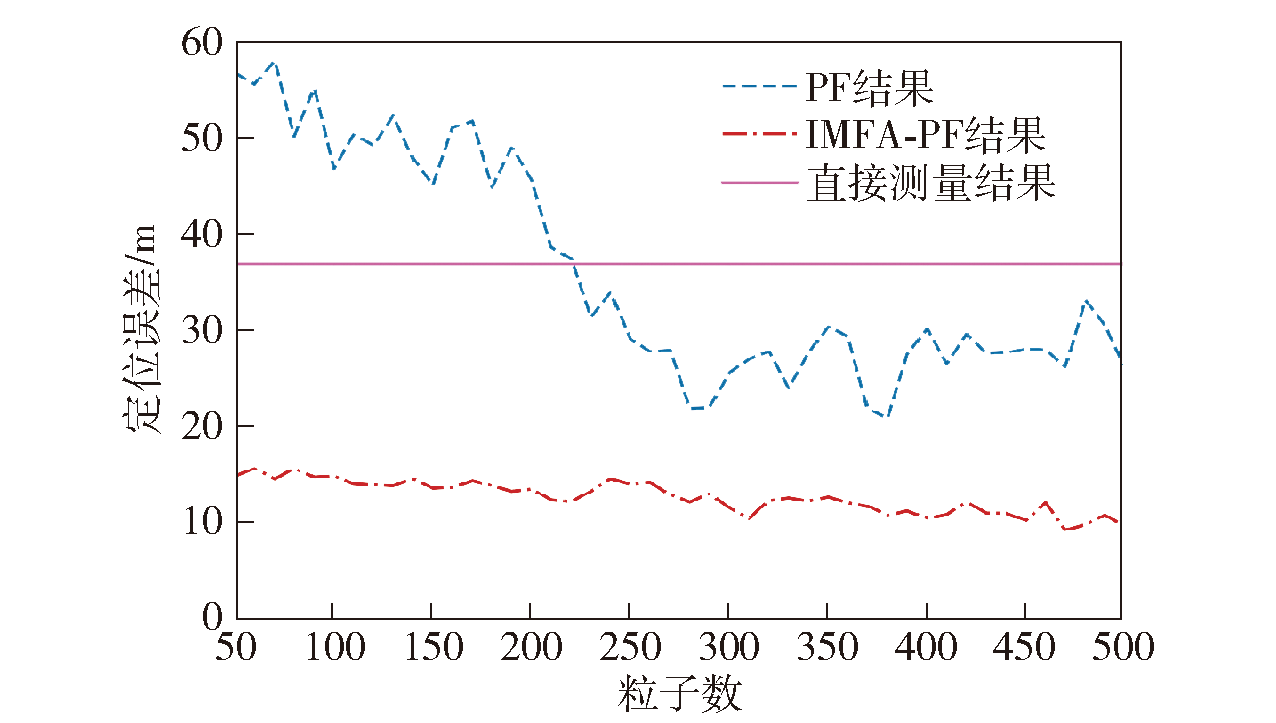
Fig.10 Final positioning error curve
| 算法 | 性能指标 | 目标 | ||||
|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | ||
| PF | 平均RMSE/m | 29.21 | 29.45 | 31.69 | 34.54 | 35.97 |
| 运算时间/s | 0.926 | |||||
| BA-PF | 平均RMSE/m | 17.33 | 17.99 | 17.46 | 18.97 | 19.31 |
| 运算时间/s | 1.024 | |||||
| SFA-FA | 平均RMSE/m | 14.20 | 15.63 | 15.44 | 17.69 | 18.14 |
| 运算时间/s | 1.309 | |||||
| IMFA-PF | 平均RMSE/m | 10.82 | 10.69 | 11.34 | 12.46 | 12.90 |
| 运算时间/s | 1.554 | |||||
Table 3 Positioning accuracies and computation times of different algorithms
| 算法 | 性能指标 | 目标 | ||||
|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | ||
| PF | 平均RMSE/m | 29.21 | 29.45 | 31.69 | 34.54 | 35.97 |
| 运算时间/s | 0.926 | |||||
| BA-PF | 平均RMSE/m | 17.33 | 17.99 | 17.46 | 18.97 | 19.31 |
| 运算时间/s | 1.024 | |||||
| SFA-FA | 平均RMSE/m | 14.20 | 15.63 | 15.44 | 17.69 | 18.14 |
| 运算时间/s | 1.309 | |||||
| IMFA-PF | 平均RMSE/m | 10.82 | 10.69 | 11.34 | 12.46 | 12.90 |
| 运算时间/s | 1.554 | |||||
| [1] |
|
| [2] |
吴岸平, 郭正, 侯中喜, 等. 不确定环境下无人机区域目标搜索及载荷参数影响[J]. 国防科技大学学报, 2020, 42(4):35-42.
|
|
|
|
| [3] |
王东振, 张岳, 赵宇, 等. 基于RRT-Dubins的无人机航迹优化方法[J]. 兵工学报, 2024, 45(8):2761-2773.
doi: 10.12382/bgxb.2023.0611 |
|
doi: 10.12382/bgxb.2023.0611 |
|
| [4] |
任双, 周洁, 高嵩, 等. 基于注意力机制的无人机集群协同分群控制算法[J]. 电子学报, 2023, 51(7):1898-1905.
doi: 10.12263/DZXB.20221378 |
|
|
|
| [5] |
宫远强, 张业鹏, 马万鹏, 等. 无人机蜂群中的群体智能涌现机理[J]. 兵工学报, 2023, 44(9):2661-2671.
doi: 10.12382/bgxb.2022.1181 |
|
|
|
| [6] |
朱惠民, 贾正荣, 王航宇, 等. 针对不同视场辅助信标的无人机目标定位方法[J]. 国防科技大学学报, 2019, 41(3):125-136.
|
|
|
|
| [7] |
|
| [8] |
陈晨, 关棒磊, 尚洋, 等. 受限观测条件下光电对地定位的全局最优化方法[J]. 光学学报, 2023, 43(12):144-152.
|
|
|
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
doi: 10.1109/TIP.2022.3157450 pmid: 35286258 |
| [14] |
田丹, 陈钰坤. 基于改进ORB算法的遥感图像匹配[J]. 沈阳大学学报(自然科学版), 2024, 36(1):34-39.
|
|
|
|
| [15] |
唐大全, 柳向阳, 邓伟栋, 等. 基于迭代无迹卡尔曼滤波的小型无人机目标定位方法[J]. 指挥控制与仿真, 2019, 41(1):104-108.
doi: 10.3969/j.issn.1673-3819.2019.01.021 |
|
|
|
| [16] |
陈丹琪, 金国栋, 谭力宁, 等. 基于非线性最小二乘法的无人机机载光电平台目标定位[J]. 光电工程, 2019, 46(9):84-92.
|
|
|
|
| [17] |
白冠冰, 宋悦铭, 左羽佳, 等. 机载光电平台的对地多目标定位[J]. 光学精密工程, 2020, 28(10):2323-2336.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
吴学礼, 高锋, 甄然. 一种基于改进萤火虫算法优化粒子滤波的轨迹预测的方法:201910587699.9[P].2019-07-02.
|
|
|
|
| [22] |
李美红, 尹健, 徐劲祥. 基于EKF的机载光电吊舱目标定位研究[J]. 弹箭与制导学报, 2016, 36(6):157-161.
|
|
|
|
| [23] |
文尚胜, 丘志强, 许函铭, 等. 基于差分算法优化的自复位粒子滤波算法[J]. 华南理工大学学报(自然科学版), 2023, 51(3):133-145.
doi: 10.12141/j.issn.1000-565X.220368 |
|
|
|
| [24] |
陈志敏, 田梦楚, 吴盘龙, 等. 基于蝙蝠算法的粒子滤波法研究[J]. 物理学报, 2017, 66(5):47-56.
|
|
|
|
| [25] |
田梦楚, 柳林燕, 陈志敏, 等. 基于弹性机制的萤火虫优化粒子滤波算法[J]. 控制与决策, 2024, 39(2):420-428.
|
|
|
| [1] | WANG Weihan, GAO Mingze, SHI Xiaolong, HU Shiyuan, WU Yanjiang, CHEN Huimin. Modeling and Verification of Dynamic Imaging of UAV-borne Line-array LiDAR [J]. Acta Armamentarii, 2025, 46(6): 240836-. |
| [2] | ZHOU Zhenlin, LONG Teng, LIU Dawei, SUN Jingliang, ZHONG Jianxin, LI Junzhi. Path Planning Method for Large-scale UAV Swarms Based on Reinforcement Learning Conflict Resolution [J]. Acta Armamentarii, 2025, 46(5): 241146-. |
| [3] | HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei. Multi-UAV Sequential Capture Algorithm for Area Defense [J]. Acta Armamentarii, 2025, 46(4): 240343-. |
| [4] | HOU Tianle, BI Wenhao, HUANG Zhanjun, LI Minghao, ZHANG An. Prescribed-time Formation Control with Event-triggering Mechanism for Multi-agent Systems [J]. Acta Armamentarii, 2025, 46(4): 240292-. |
| [5] | ZENG Zhaoyang, PENG Wensheng, LI Yunkai, XU Ming. Connotation,Development and Challenges of Reliability Technology of Intelligent UAV Swarm [J]. Acta Armamentarii, 2025, 46(3): 240322-. |
| [6] | LIU Cong, LI Baiqing, ZHANG Zongwei, SHAN Zezhong. Investigation of Multi-dimensional Aerodynamic Characteristics of UAV Rotor Subjected to Horizontal Inflow [J]. Acta Armamentarii, 2025, 46(3): 240316-. |
| [7] | ZHANG Fenglin, DONG Yihao, XIN Jianshe, GUO Liping, GU Xuechen, QU Jiaqi. Parameter Selection and Optimization Algorithm for Low-overload Compressed Air Launch of Small Unmanned Aerial Vehicles Based on Particle Swarm Optimization [J]. Acta Armamentarii, 2025, 46(2): 240014-. |
| [8] | ZHANG Xinze, XIAO Haijian, LIU Xinglong, XING Kongrui, LU Xiang. Design and Realization of a Ducted Fan Water-air Amphibious UAV [J]. Acta Armamentarii, 2025, 46(1): 231172-. |
| [9] | HU Mingzhe, LI Xuguang, REN Zhiying, ZENG Shuai. UAV 3D Path Planning Based on A* Algorithm with Improved Heuristic Function [J]. Acta Armamentarii, 2024, 45(S1): 302-307. |
| [10] | LI Mao, ZHAO Mingtao, SHA Shichao, LI Xiao, HUA Weihong. Focusing Strategy and Effect Analysis of UAV-based Laser Relay Redirectional Energy Transmission Device [J]. Acta Armamentarii, 2024, 45(S1): 316-321. |
| [11] | PAN Zishuang, SU Xichao, HAN Wei, LIU Wenlin, YU Dazhao, WANG Jie. Cooperative Combat Coalition Formation of Heterogeneous UAV Swarm Based on Dynamic Consensus-based Grouping Algorithm [J]. Acta Armamentarii, 2024, 45(9): 3177-3190. |
| [12] | LIU Siyu, ZHANG Deyu, MING Zhiyuan, LIU Mengzhen, LIU Ziyu, CHEN Qiming, ZHANG Jian, WU Jinglong, YAN Tianyi. Remote Brain-controlled Unmanned Aerial Vehicle System Based on Brain-machine Interface and Human-machine Closed Loop [J]. Acta Armamentarii, 2024, 45(9): 3191-3203. |
| [13] | WANG Dongzhen, ZHANG Yue, ZHAO Yu, HUANG Daqing. A UAV Trajectory Optimization Method Based on RRT-Dubins [J]. Acta Armamentarii, 2024, 45(8): 2761-2773. |
| [14] | SHEN Ying, LIU Xiancai, WANG Shu, HUANG Feng. Real-time Detection of Low-altitude Camouflaged Targets Based on Polarization Encoded Images [J]. Acta Armamentarii, 2024, 45(5): 1374-1383. |
| [15] | LIU Wangsheng, PAN Haipeng, WANG Minghuan. Composite Model Particle Filter for Indoor Sound Source Location Based on Multi-feature [J]. Acta Armamentarii, 2024, 45(3): 975-985. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||