
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (4): 240215-.doi: 10.12382/bgxb.2024.0215
Previous Articles Next Articles
QIN Boyu1,2, ZHANG Dong1,2,*( ), TANG Shuo1,2
), TANG Shuo1,2
Received:2024-03-26
Online:2025-04-30
Contact:
ZHANG Dong
CLC Number:
QIN Boyu, ZHANG Dong, TANG Shuo. A Discussion on Key Issues and Technologies of Aircraft Swarm Safety Control[J]. Acta Armamentarii, 2025, 46(4): 240215-.
Add to citation manager EndNote|Ris|BibTeX
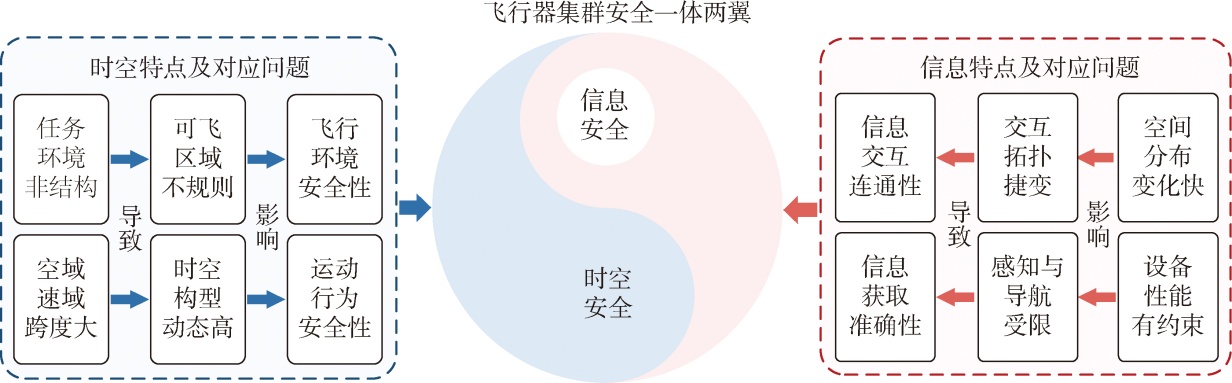
Fig.1 The main characteristics and safety problems of aircraft swarm
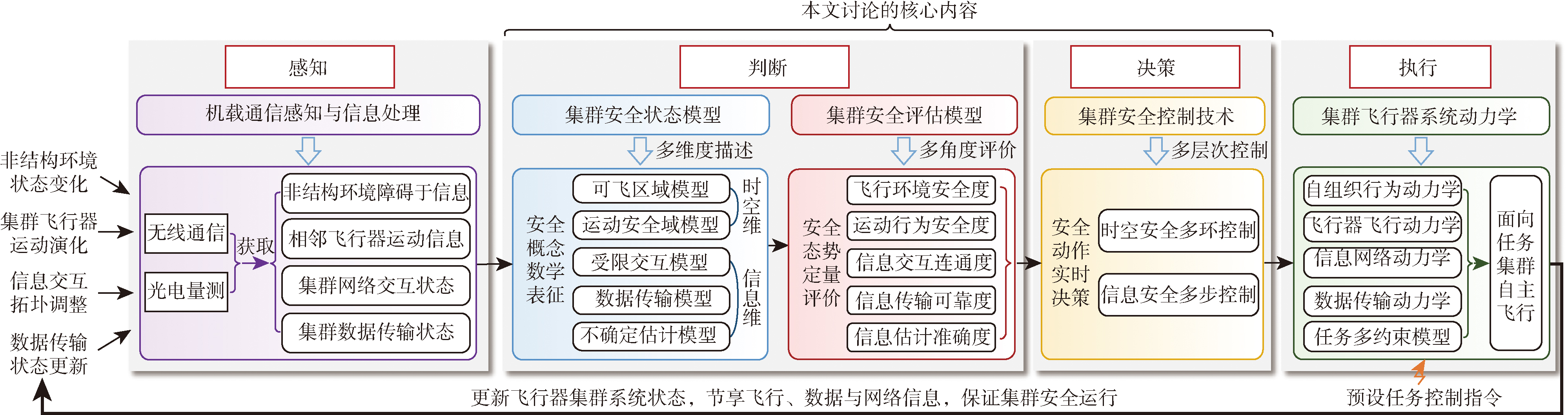
Fig.2 Research framework of safety control for aircraft swarm
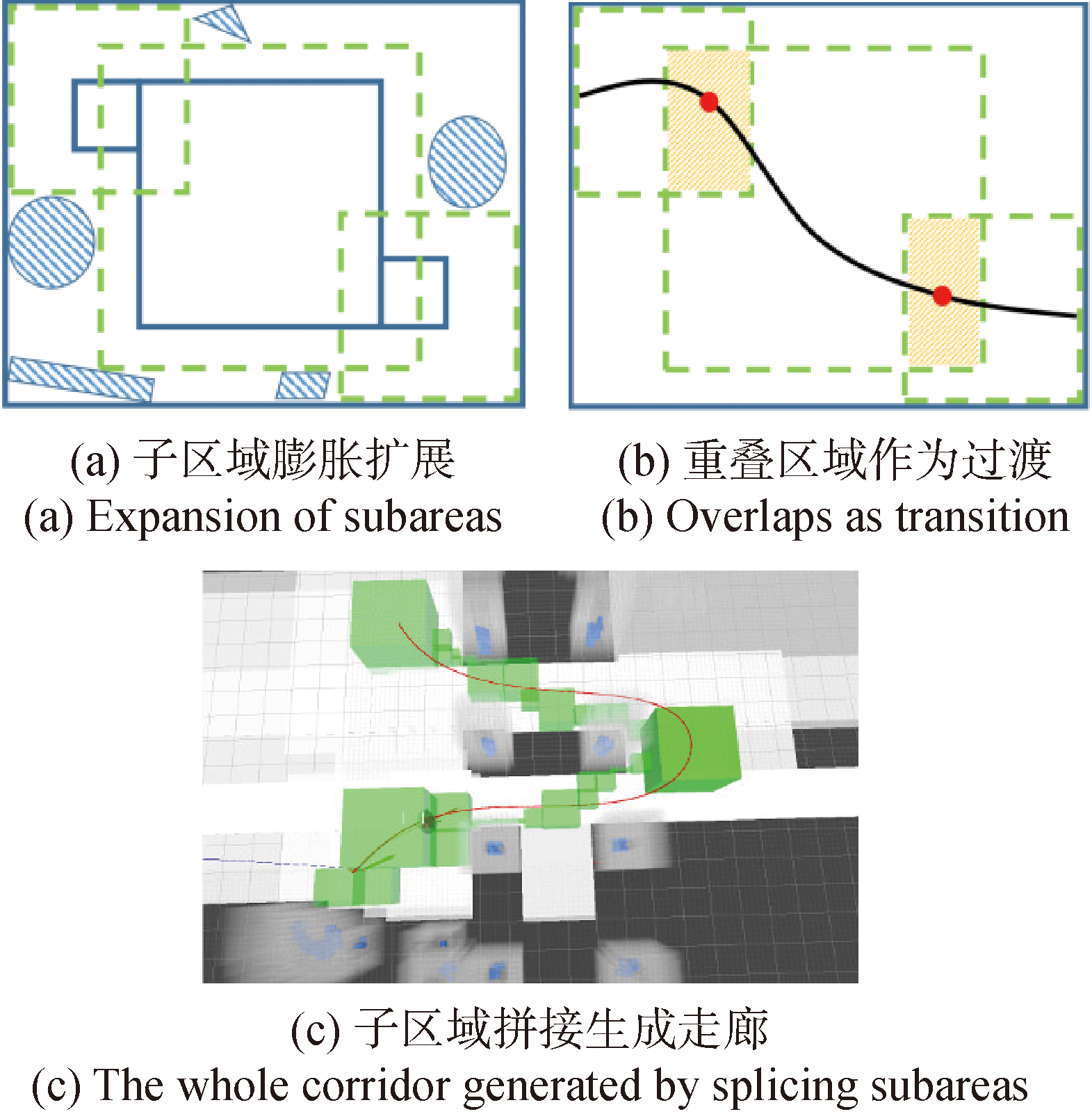
Fig.3 The generation procedure of safety flight corridor[16]
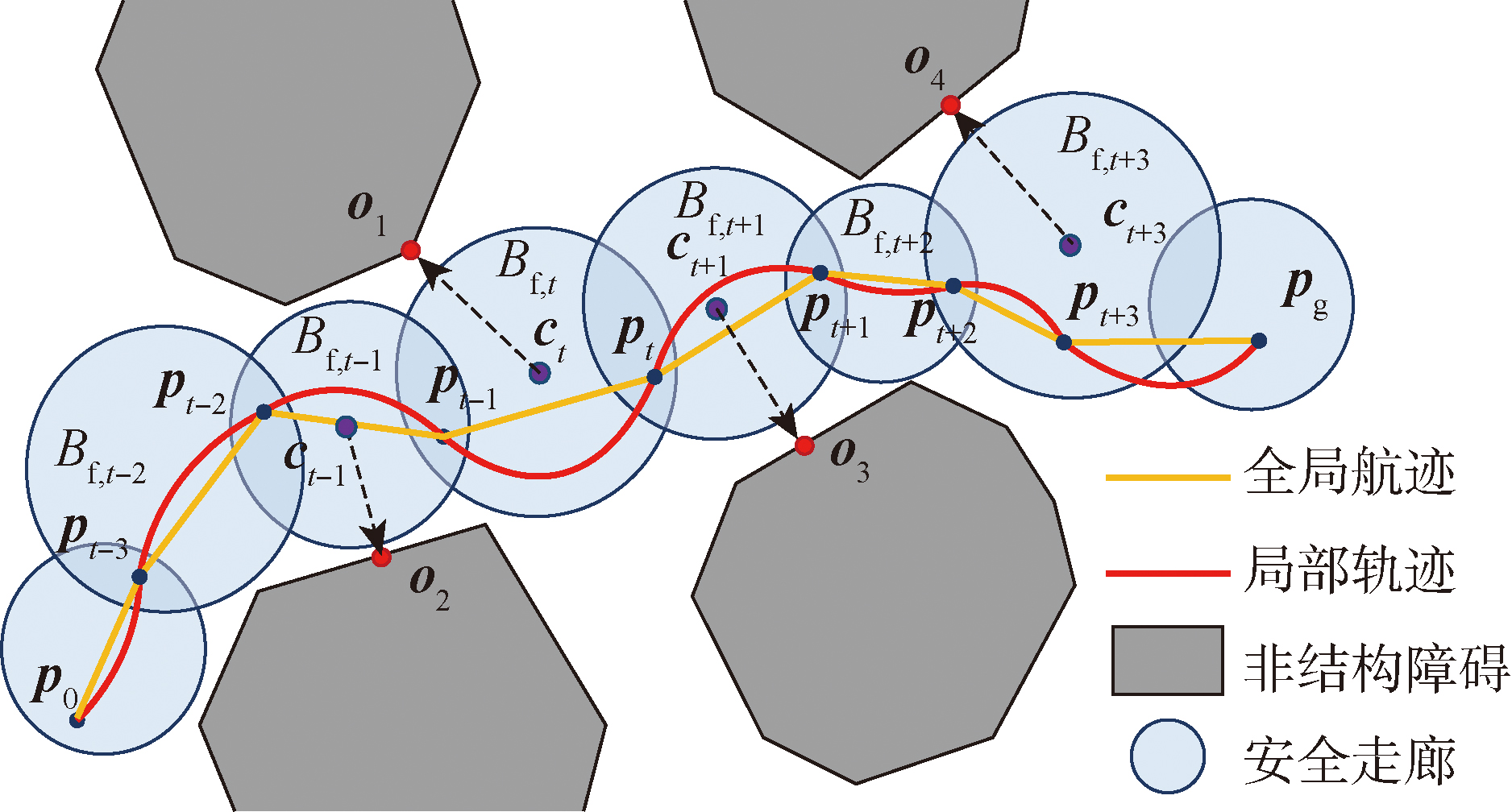
Fig.4 The safety flight corridor with sphere subareas[19]
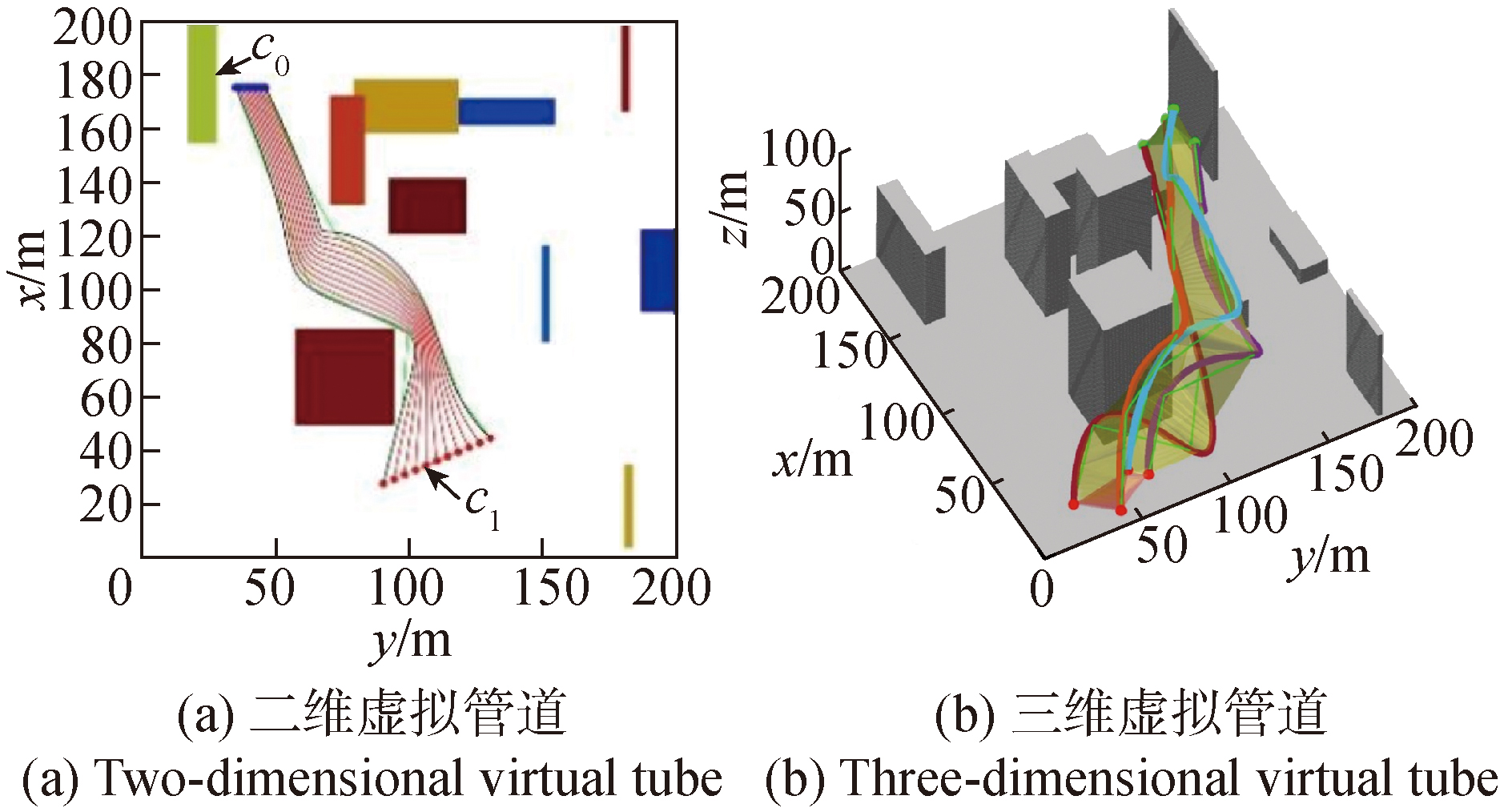
Fig.5 Schematic diagram of virtual tubes[24-26]
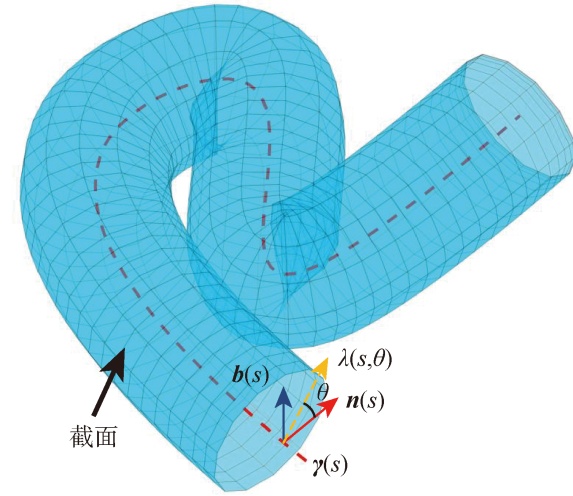
Fig.6 Parameterized description of virtual tube[29]
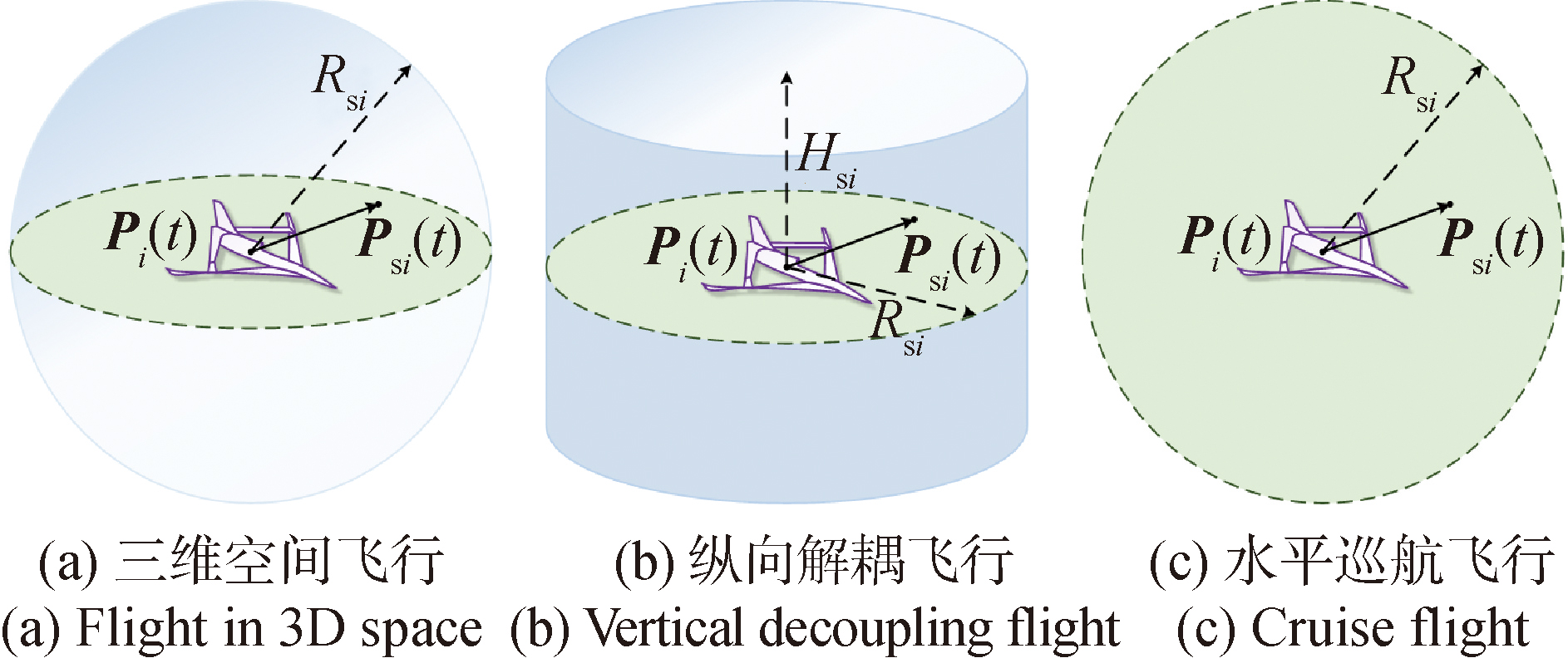
Fig.7 Safety airspace of single aircraft in different scenarios
| 模型类别 | 适用问题 | 优势 | 劣势 | 应用场景 |
|---|---|---|---|---|
| 速度障碍模型 | 运动学问题 | 模型简单,实时性好,基于局部信息即可运行 | 缺乏严谨理论分析,对动力学复杂的运动体适用性差,可能出现振荡或死锁 | 近距碰撞检测与轨迹冲突预警 |
| 控制障碍函数 | 运动学问题、 动力学问题 | 适应集中式和分布式等多种模式的复杂系统,约束性强,可与其他控制律结合 | 构造难度大,需要详细理论分析,可能出现过约束导致无解 | 安全机动控制与轨迹优化 |
Table 1 Comparison of motion safety domain models
| 模型类别 | 适用问题 | 优势 | 劣势 | 应用场景 |
|---|---|---|---|---|
| 速度障碍模型 | 运动学问题 | 模型简单,实时性好,基于局部信息即可运行 | 缺乏严谨理论分析,对动力学复杂的运动体适用性差,可能出现振荡或死锁 | 近距碰撞检测与轨迹冲突预警 |
| 控制障碍函数 | 运动学问题、 动力学问题 | 适应集中式和分布式等多种模式的复杂系统,约束性强,可与其他控制律结合 | 构造难度大,需要详细理论分析,可能出现过约束导致无解 | 安全机动控制与轨迹优化 |

Fig.8 Velocity obstacle and its derivative models

Fig.9 Motion safety domain model of aircraft swarm based on SBC

Fig.10 Limited interaction models of aircraft swarm
| 模型类别 | 适用问题 | 模型特点 | 应用场景 |
|---|---|---|---|
| 基于自组织规则 | 交互连通安全状态的理论分析 | 能够模拟自组织规则约束下的交互过程 | 连通保持控制 |
| 基于物理性能 | 交互连通安全状态的工程分析与应用 | 能够模拟设备物理约束下的交互过程 | 拓扑抗毁设计、连通保持控制 |
| 基于随机网络 | 交互连通安全状态的工程分析与应用 | 能够模拟随机连接规则下的交互过程 | 交互网络断连检测与重构 |
Table 2 Comparison of limited interaction models
| 模型类别 | 适用问题 | 模型特点 | 应用场景 |
|---|---|---|---|
| 基于自组织规则 | 交互连通安全状态的理论分析 | 能够模拟自组织规则约束下的交互过程 | 连通保持控制 |
| 基于物理性能 | 交互连通安全状态的工程分析与应用 | 能够模拟设备物理约束下的交互过程 | 拓扑抗毁设计、连通保持控制 |
| 基于随机网络 | 交互连通安全状态的工程分析与应用 | 能够模拟随机连接规则下的交互过程 | 交互网络断连检测与重构 |
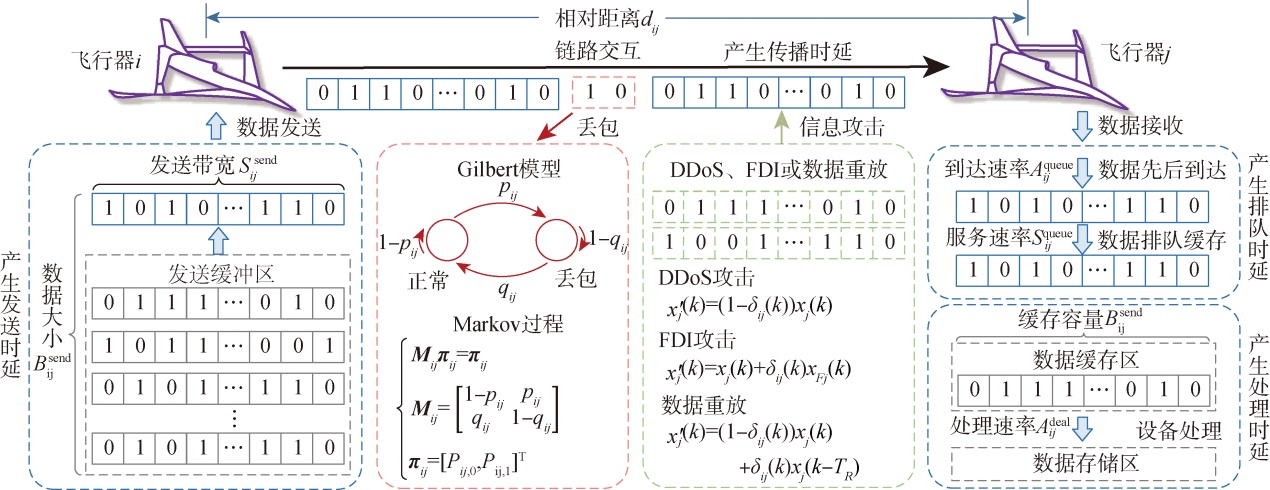
Fig.11 Schematic diagram of information transfer of aircraft swarm system under the conditions of data loss and external attack
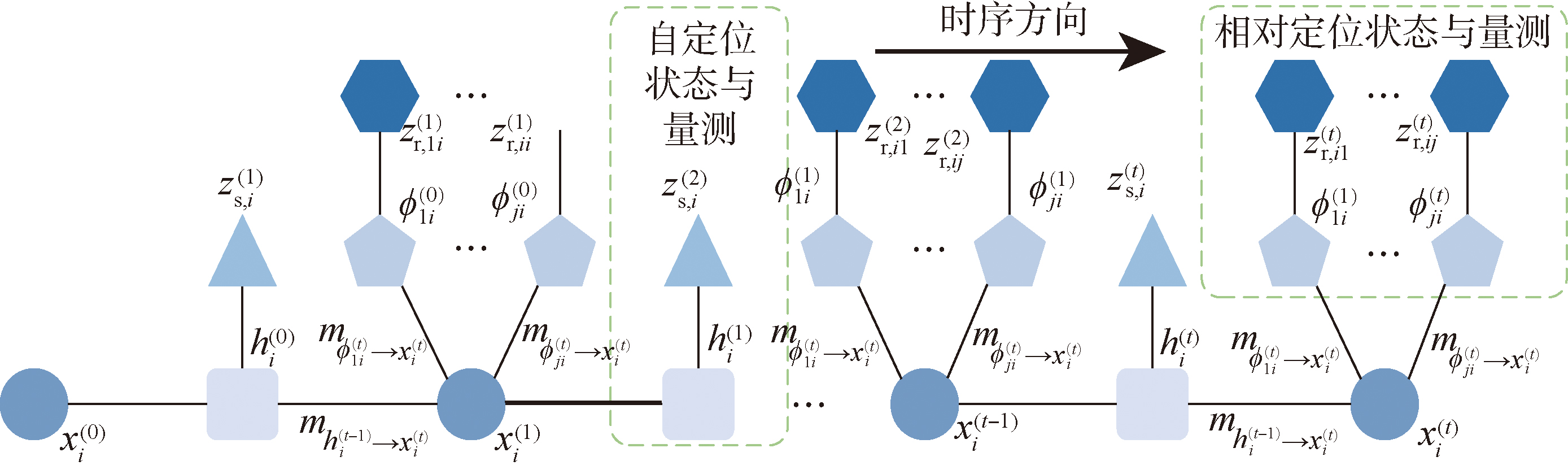
Fig.12 Factor graph of uncertain information of aircraft swarm
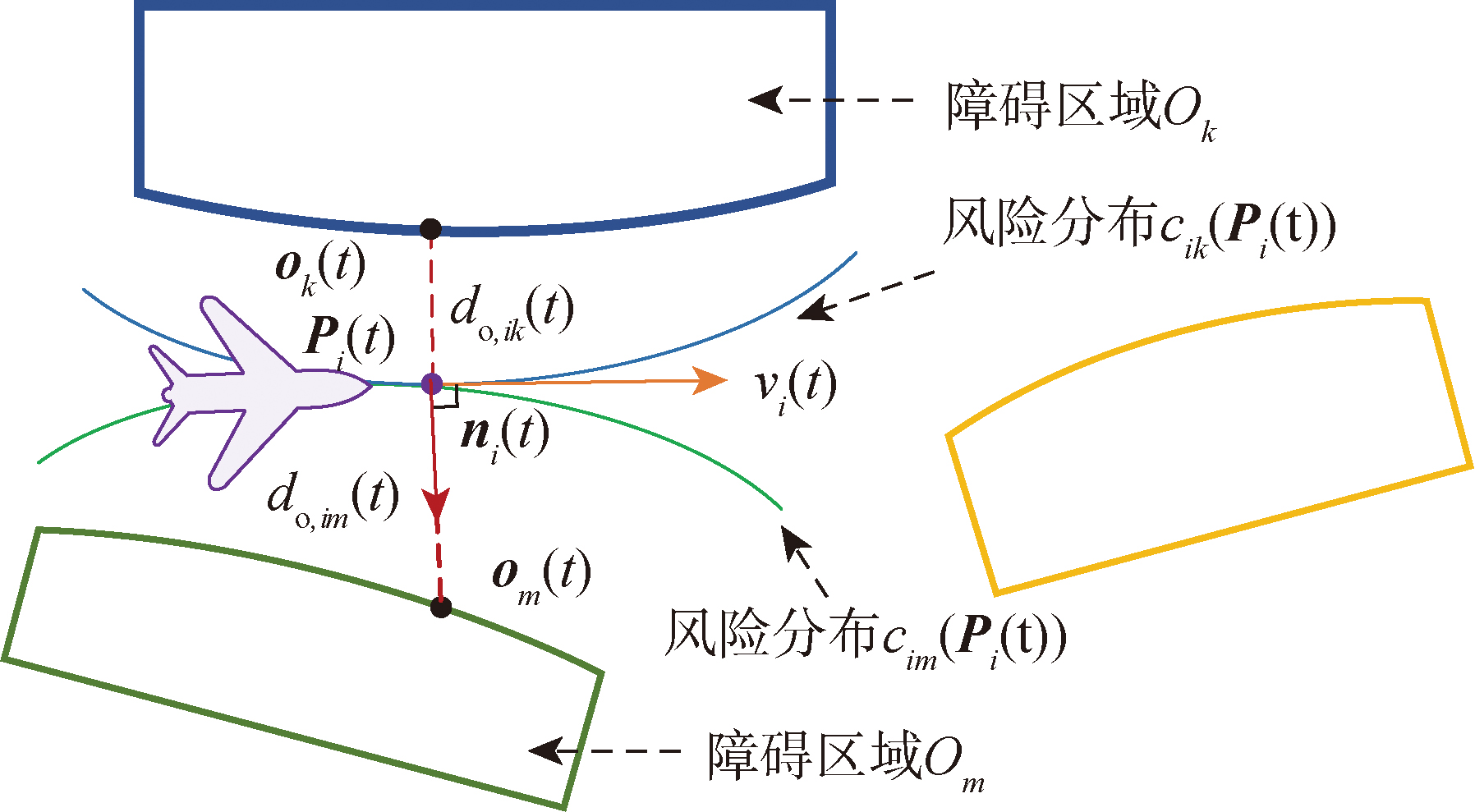
Fig.13 The distribution function of obstacle in unstructured environment
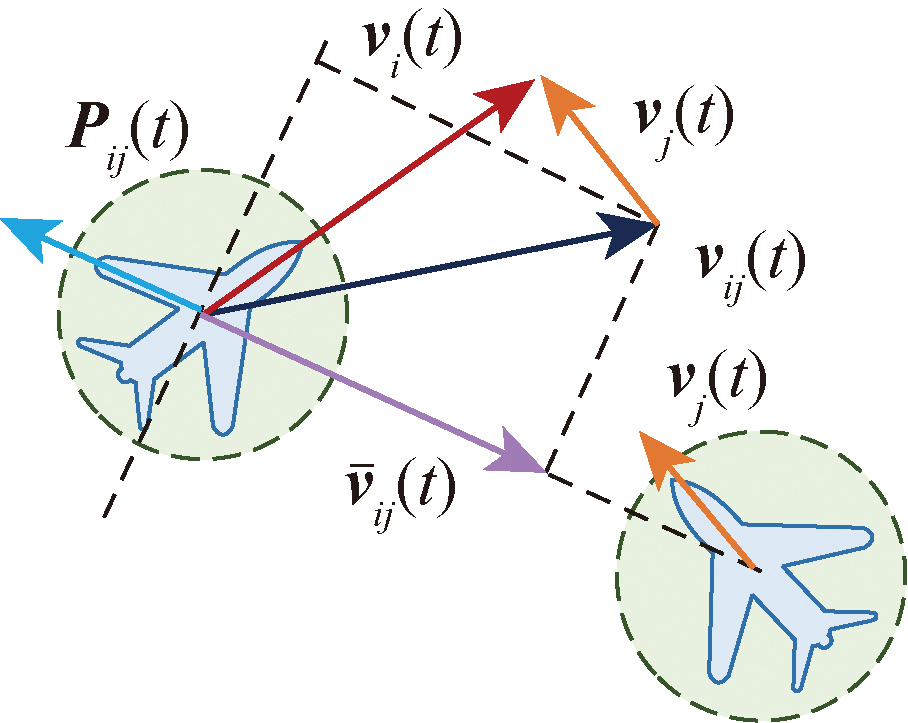
Fig.14 Relative motion of a pair of aircrafts
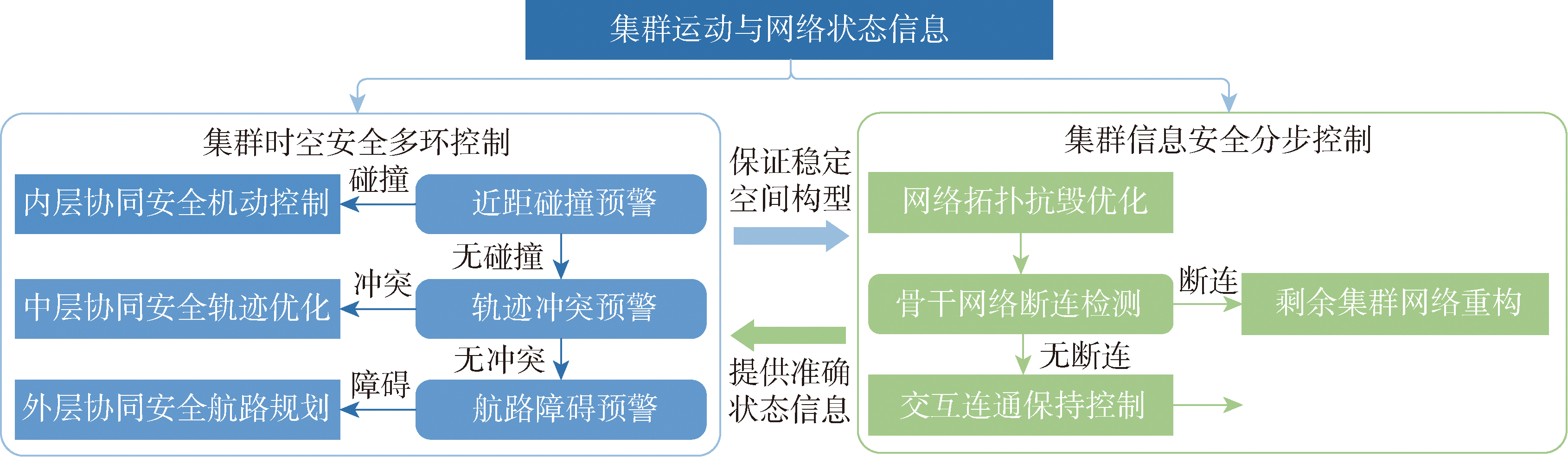
Fig.15 Safety control scheme for aircraft swarm
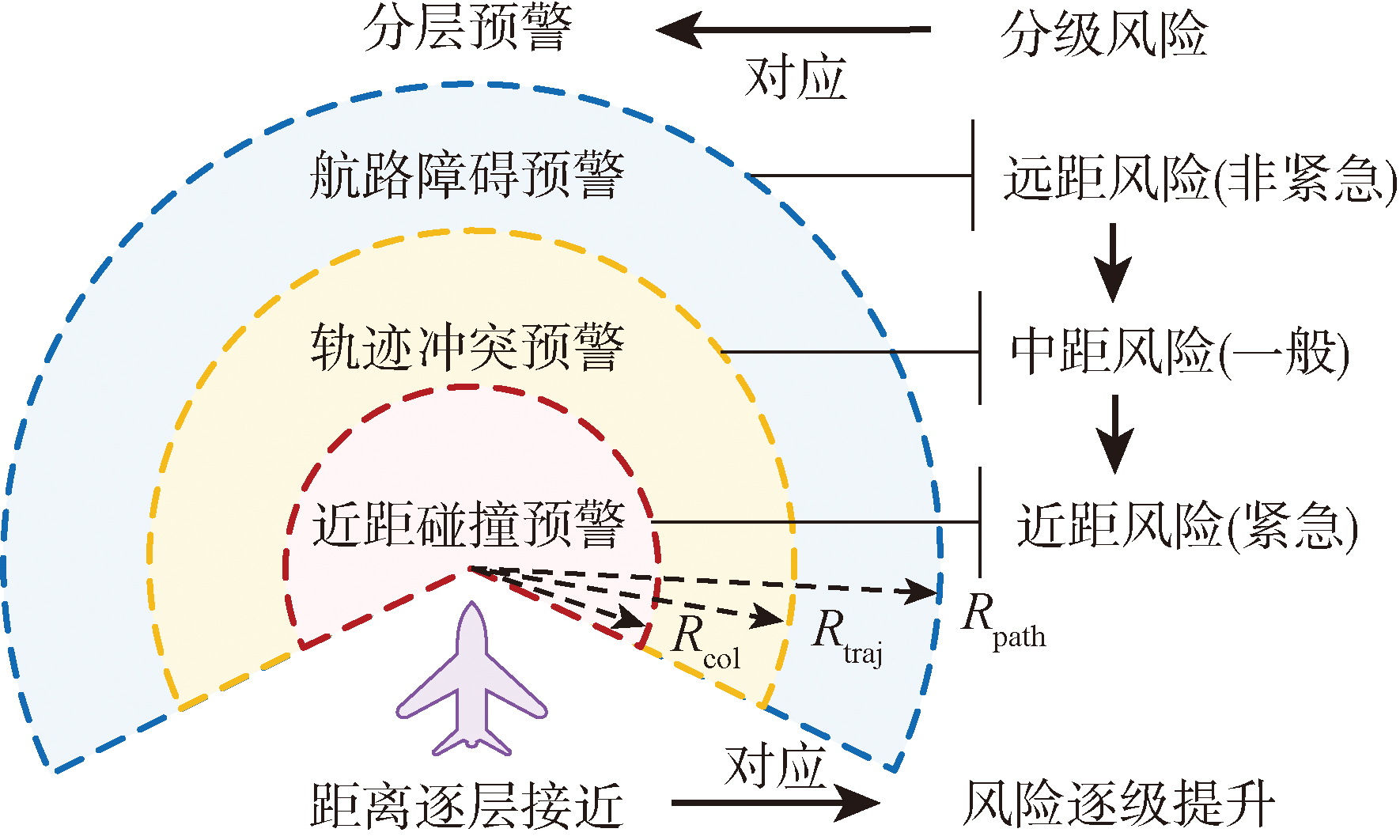
Fig.16 The distance-based layered early warning mechanism
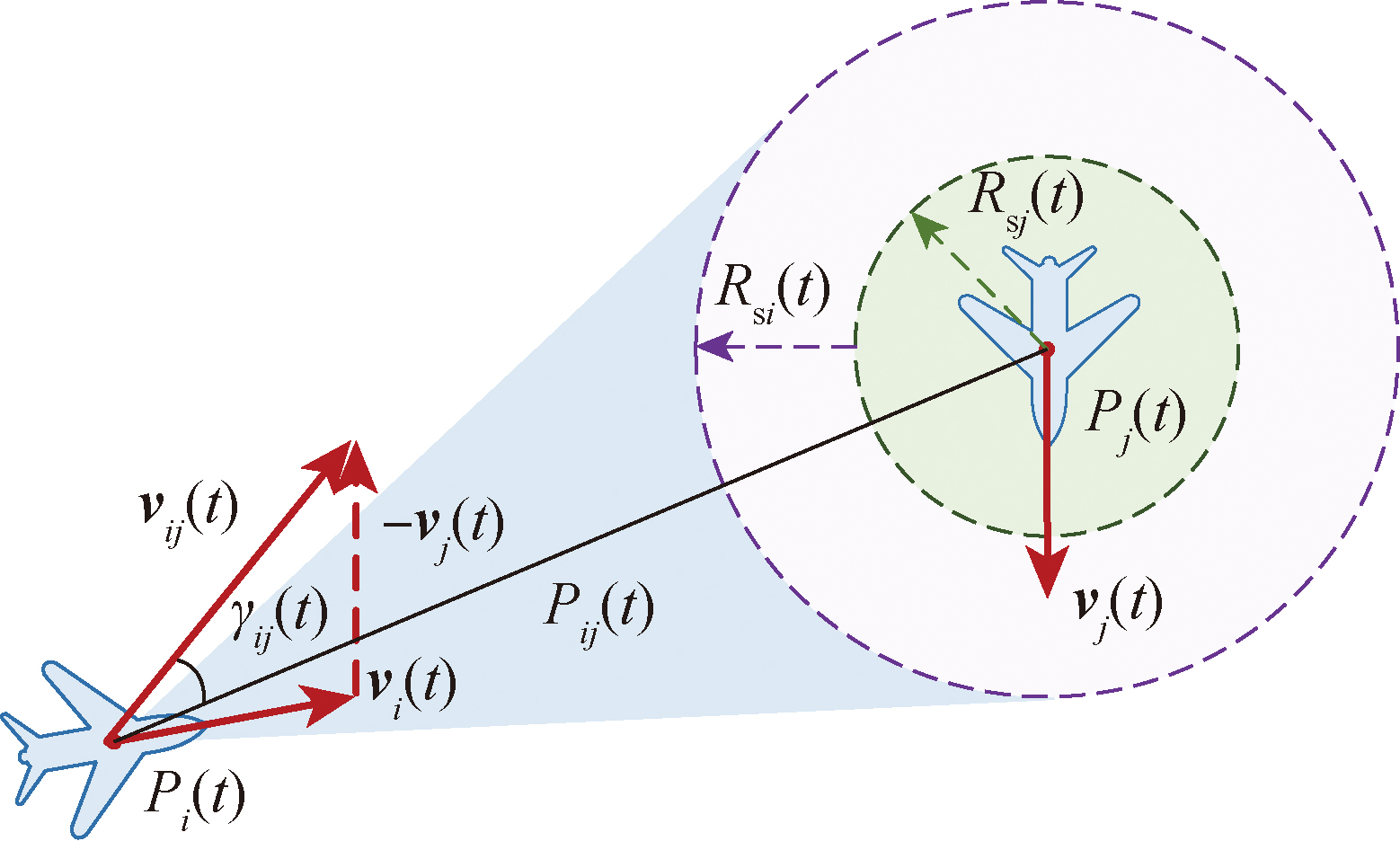
Fig.17 VO-based close collision warning
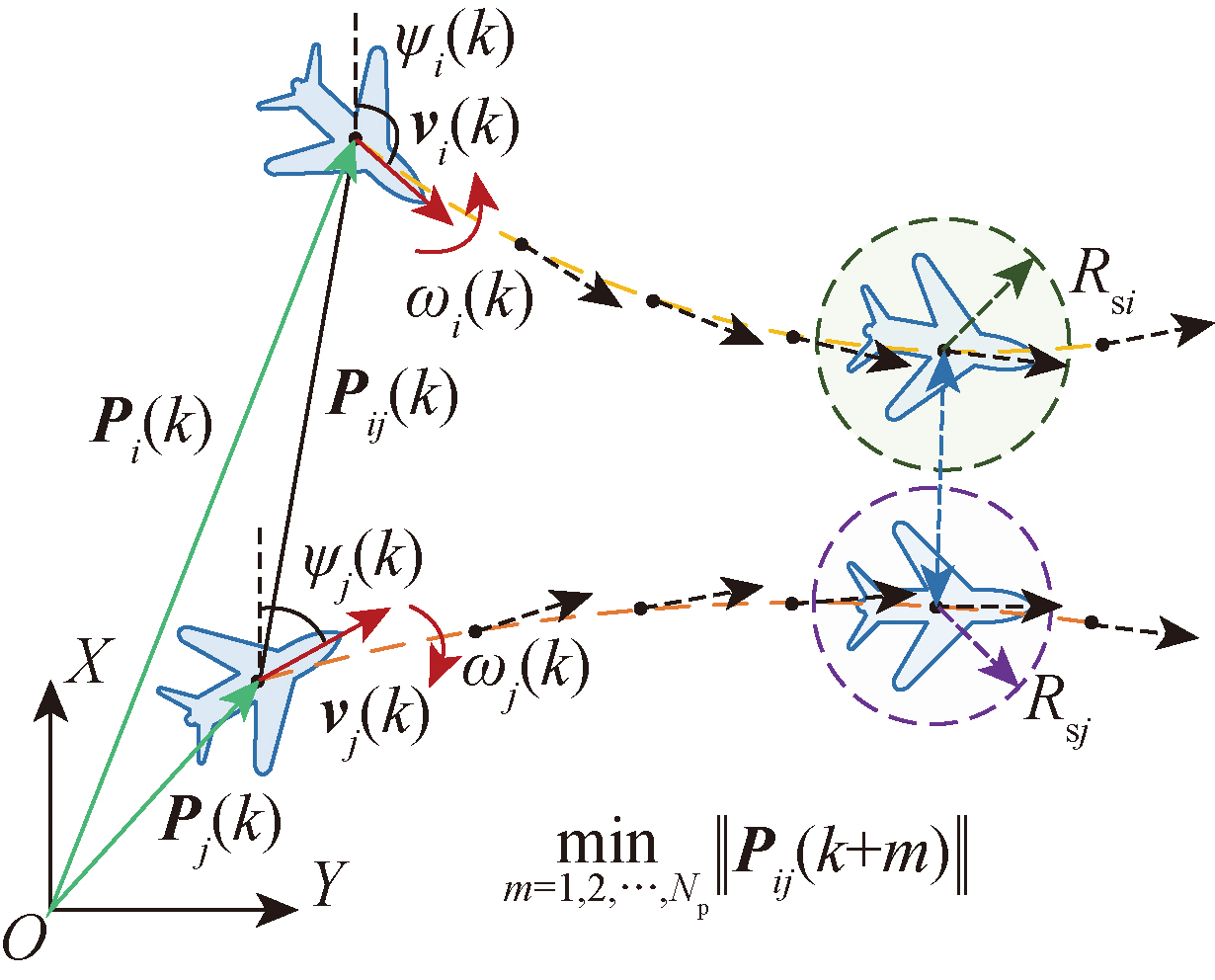
Fig.18 Prediction-based trajectory conflict warning

Fig.19 Geometric-detection-based path obstacle warning

Fig.20 The crucial technologies of multi-step control for the information security of aircraft swarm
| [1] |
邹明胤, 朱晓敏, 包卫东, 等. 有人/无人集群任务规划系统集成框架[J]. 指挥与控制学报, 2023, 9(1):45-57.
|
|
|
|
| [2] |
李军, 陈士超. 无人机蜂群关键技术发展综述[J]. 兵工学报, 2023, 44(9):2533-2545.
|
|
|
|
| [3] |
李亿俍, 李娟, 刘畅, 等. 微分博弈在无人机集群攻防中的应用研究[J]. 无人系统技术, 2022, 5(5):39-50.
|
|
|
|
| [4] |
陈谋, 马浩翔, 雍可南, 等. 无人机安全飞行控制综述[J]. 机器人, 2023, 45(3):345-366.
|
|
|
|
| [5] |
潘泉, 郭亚宁, 吕洋, 等. 无人机系统自主安全:定义、建模与分级[J]. 中国科学:信息科学, 2023, 53(8):1608-1628.
|
|
|
|
| [6] |
郭雷, 余翔, 张霄, 等. 无人机安全控制系统技术:进展与展望[J]. 中国科学:信息科学, 2020, 50(2):184-194.
|
|
|
|
| [7] |
郭雷, 朱玉凯, 乔建忠, 等. 无人系统生存智能与安全、免疫、绿色控制技术[J]. 航空学报, 2022, 43(10):527129.
|
|
|
|
| [8] |
江碧涛, 温广辉, 周佳玲, 等. 智能无人集群系统跨域协同技术研究现状与展望[J]. 中国工程科学, 2024, 26(1):117-126.
|
|
|
|
| [9] |
蔡云鹏, 周大鹏, 丁江川. 具有防撞安全约束的无人机集群智能协同控制[J]. 航空学报, 2024, 45(5):529683.
|
|
|
|
| [10] |
郑多, 初治辰, 林德福, 等. 考虑集群尾涡气动耦合效应飞行安全约束的协同制导技术[J]. 航空学报, 2024, 45(18):329906.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
赵丹, 温广辉, 黄廷文. 群体智能系统安全协同控制研究[J]. 控制工程, 2023, 30(8):1419-1424.
|
|
|
|
| [14] |
余自权, 崔玉伟, 杨海川, 等. 网络攻击下无人机集群安全协同控制技术[J]. 海军航空大学学报, 2023, 38(6):457-465,482.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
杨健. 无人机集群系统空域冲突消解方法研究[D]. 长沙: 国防科学技术大学, 2019.
|
|
|
|
| [32] |
|
| [33] |
何信, 石宗英, 钟宜生. 基于速度障碍的多无人船协同避碰[J]. 航空学报, 2023, 44(增刊2):729758.
|
|
|
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
郭华, 郭小和. 改进速度障碍法的无人机局部路径规划算法[J]. 航空学报, 2023, 44(11):327586.
|
|
|
|
| [45] |
秦明星, 王忠, 李海龙, 等. 基于分布式模型预测的无人机编队避障控制[J]. 北京航空航天大学学报, 2024, 50(6):1969-1981.
|
|
|
|
| [46] |
张宏宏, 甘旭升, 李昂, 等. 基于速度障碍法的无人机避障与航迹恢复策略[J]. 系统工程与电子技术, 2020, 42(8):1759-1767.
|
|
|
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
|
| [59] |
|
| [60] |
|
| [61] |
段碧琦. 无人机集群通信中继规划方法研究[D]. 长沙: 国防科技大学, 2022.
|
|
|
|
| [62] |
|
| [63] |
颜志, 易正伦, 欧阳博, 等. 无人机集群联合拓扑控制的智能路由规划方法[J]. 通信学报, 2024, 45(2):137-149.
|
|
|
|
| [64] |
|
| [65] |
|
| [66] |
杨光红, 芦安洋, 安立伟. 网络攻击下的信息物理系统安全状态估计研究综述[J]. 控制与决策, 2023, 38(8):2093-2105.
|
|
|
|
| [67] |
|
| [68] |
朱建良, 王立雅, 薄煜明. 行人GNSS/PDR组合导航优化估计方法[J]. 兵工学报. 2023, 44(10):3137-3145.
|
|
|
|
| [69] |
|
| [70] |
王亚静. 复杂环境下固定翼无人机集群分布式规避控制研究[D]. 长沙: 国防科技大学, 2021.
|
|
|
|
| [71] |
王祥科, 沈林成, 李杰. 无人机集群控制理论与方法[M]. 上海: 上海交通大学出版社, 2021.
|
|
|
|
| [72] |
|
| [73] |
文超, 董文瀚, 解武杰, 等. 基于回访机制的无人机集群分布式协同区域搜索方法[J]. 航空学报, 2023, 44(11):327561.
|
|
|
|
| [74] |
高兵, 张哲婕, 邹启杰, 等. 基于深度强化学习和信息论的多智能体通信方法[J]. 航空学报, 2024, 45(11):329862.
|
|
|
|
| [75] |
|
| [76] |
韩煜, 宋韬, 郑多, 等. 基于冲突触发避碰机制的无人飞行器集群协同制导技术[J]. 兵工学报, 2023, 44(7):1881-1895.
|
|
|
|
| [77] |
王泳安, 李东光, 吴浩, 等. 一种自适应滤波与干扰观测器相结合的大型舰船状态估计算法[J]. 兵工学报, 2024, 45(7):2318-2328.
|
|
|
|
| [78] |
兰庆湘, 陈谋, 雍可南. 多旋翼无人机模型预测抗扰避障制导[J]. 国防科技大学学报, 2022, 44(4):32-42.
|
|
|
|
| [79] |
王祝, 徐广通, 龙腾. 基于定制内点法的多无人机协同轨迹规划[J]. 自动化学报, 2023, 49(11):2374-2385.
|
|
|
|
| [80] |
徐广通, 王祝, 曹严, 等. 动态优先级解耦的无人机集群轨迹分布式序列凸规划[J]. 航空学报, 2022, 43(2):325059.
|
|
|
|
| [81] |
唐永兴, 朱战霞, 张红文, 等. 机器人运动规划方法综述[J]. 航空学报, 2023, 44(2):026495.
|
|
|
|
| [82] |
李尔玉, 龚建兴, 黄健, 等. 基于功能链的作战体系复杂网络节点重要性评价方法[J]. 指挥与控制学报, 2018, 4(1):42-49.
|
|
|
|
| [83] |
王运明, 崔怀健, 陈波, 等. 基于边连接策略的指控网络模型研究[J]. 指挥与控制学报, 2016, 2(1):40-46.
|
|
|
|
| [84] |
张品, 董志远, 沈政. 用于评价通信网节点重要性的多参数优化算法[J]. 计算机工程, 2013, 39(6):95-98.
|
|
|
|
| [85] |
周漩, 张凤鸣, 李克武, 等. 利用重要度评价矩阵确定复杂网络关键节点[J]. 物理学报, 2012, 61(5):1-7.
|
|
|
|
| [86] |
尹荣荣, 尹学良, 崔梦頔, 等. 基于重要度贡献的无标度网络节点评估方法[J]. 软件学报, 2019, 30(6):1875-1885.
|
|
|
|
| [87] |
董广智, 由佳, 王战. 自适应网络结构断边重连方法设计与实现[J]. 计算机仿真, 2022, 39(8):427-431.
|
|
|
|
| [88] |
李佳威, 吴明功, 温祥西, 等. 基于最小连通支配集的复杂网络关键节点与连边识别方法[J]. 系统工程与电子技术, 2019, 41(11) 2541-2549.
|
|
|
|
| [89] |
|
| [90] |
|
| [91] |
|
| [92] |
吴明功, 毕可心, 温祥西, 等. 基于飞行冲突网络最优支配集的冲突调配策略[J]. 北京航空航天大学学报, 2023, 49(2):242-253.
|
|
|
|
| [93] |
陈浩, 王祥科, 杨健. 面向集群一致性的抗毁性网络分析与设计[J]. 指挥与控制学报, 2022, 8(2):189-197.
|
|
|
|
| [94] |
王强. 面向任务的多智能体系统抗毁性拓扑结构构建与群集控制[D]. 北京: 北京理工大学, 2015.
|
|
|
|
| [95] |
|
| [96] |
|
| [97] |
|
| [98] |
|
| [99] |
汪镇涛, 李大鹏, 丁良辉, 等. 基于多重虚拟力控制的无人机覆盖编队分簇算法[J]. 指挥与控制学报, 2023, 9(2):204-214.
|
|
|
|
| [100] |
|
| [101] |
|
| [102] |
|
| [103] |
|
| [104] |
|
| [105] |
潘子双, 苏析超, 韩维, 等. 基于动态一致性联盟算法的异构无人机集群协同作战联盟组建[J]. 兵工学报, 2024, 45(9):3177-3190.
|
|
|
|
| [106] |
芦倩, 李晓娟, 关永, 等. 面向数据流的ROS2数据分发服务形式建模与分析[J]. 软件学报, 2021, 32(6):1818-1829.
|
|
|
|
| [107] |
|
| [108] |
杜越洋, 赵盾, 闫智超. 基于数据分发服务的无人机任务载荷综合仿真平台研究[J]. 无人系统技术, 2021, 4(1):79-86.
|
|
|
|
| [109] |
|
| [110] |
赵国荣, 廖海涛, 韩旭, 等. 能量和带宽受限下的分布式一致性融合估计器[J]. 控制与决策, 2020, 35(1):16-24.
|
|
|
|
| [111] |
叶丹, 靳凯净, 张天予. 网络攻击下的信息物理系统安全性研究综述[J]. 控制与决策, 2023, 38(8):2243-2252.
|
|
|
|
| [112] |
唐帅文, 周志杰, 姜江, 等. 考虑扰动的无人机集群协同态势感知一致性评估[J]. 航空学报, 2020, 41(增刊2):724233.
|
|
|
|
| [113] |
潘献飞, 宁治文, 王茂松, 等. 基于因子图的导航定位技术应用分析与思考[J]. 控制理论与应用, 2023, 40(12):2130-2141.
|
|
|
| [1] | XIAO Yang, SU Bo, JI Chao, YANG Dezhen, ZHOU Tong. System Safety Analysis of Unmanned Ground Vehicles Based on STPA Method and Bow-Tie Model [J]. Acta Armamentarii, 2024, 45(S2): 153-161. |
| [2] | SHI Bo, CHEN Xi, LI Pengfei, HAN Ruoyu, QIN Sichao, HE Zhongzheng, SUN Haoyang. Ballistic Endpoint Ide.pngication Based on Projectile Rotation Characteristics and Fuze Full Ballistic Safety Control Method [J]. Acta Armamentarii, 2024, 45(9): 3105-3113. |
| [3] | YIN Qiulin, CHEN Qi, WANG Zhongyuan, WANG Qinghai. Rapid Trajectory Planning for Glide-guided Projectiles in Single-gun Multi-shot Scenarios Considering Time-spatial Coordination [J]. Acta Armamentarii, 2024, 45(3): 798-809. |
| [4] | SHENG Hui, XIANG Changle, GAI Jiangtao, YUAN Yi, JIAN Hongchao, ZHANG Nan. Vehicle Safety Control of Tracked Vehicle Driven by Two-sided Motor Coupling under the Failure Mode of One-sided Motor [J]. Acta Armamentarii, 2023, 44(11): 3498-3507. |
| [5] | LI Xu, QIU Song-qing, PENG Jin-lin, WANG Cong. An Improved Multi-path Routing Protocol in Mobile Ad Hoc Network [J]. Acta Armamentarii, 2016, 37(11): 2022-2028. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||