
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (3): 240421-.doi: 10.12382/bgxb.2024.0421
WANG Yimin1, YUAN Shusen2,*( ), LIN Darui1, YANG Guolai1,**()
), LIN Darui1, YANG Guolai1,**()
Received:2024-05-29
Online:2025-03-26
Contact:
YUAN Shusen, YANG Guolai
CLC Number:
WANG Yimin, YUAN Shusen, LIN Darui, YANG Guolai. Nonlinear Sliding Mode Control Based on Neural Network Compensation for Tank All-electric Bidirectional Stabilizers[J]. Acta Armamentarii, 2025, 46(3): 240421-.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Tank all-electric bidirectional stabilizer
Fig.2 Geometry of vertical motion
Fig.3 Principle of FOC control

Fig.4 Structure of the feedforward neural network

Fig.5 Comparison of functions y=tanh(x/ξ) and y=sgn(x)

Fig.6 Schematic diagram of control system
Fig.7 Topological relation of tank

Fig.8 Multibody dynamics model of the tank

Fig.9 3D spectrum of E-level pavement
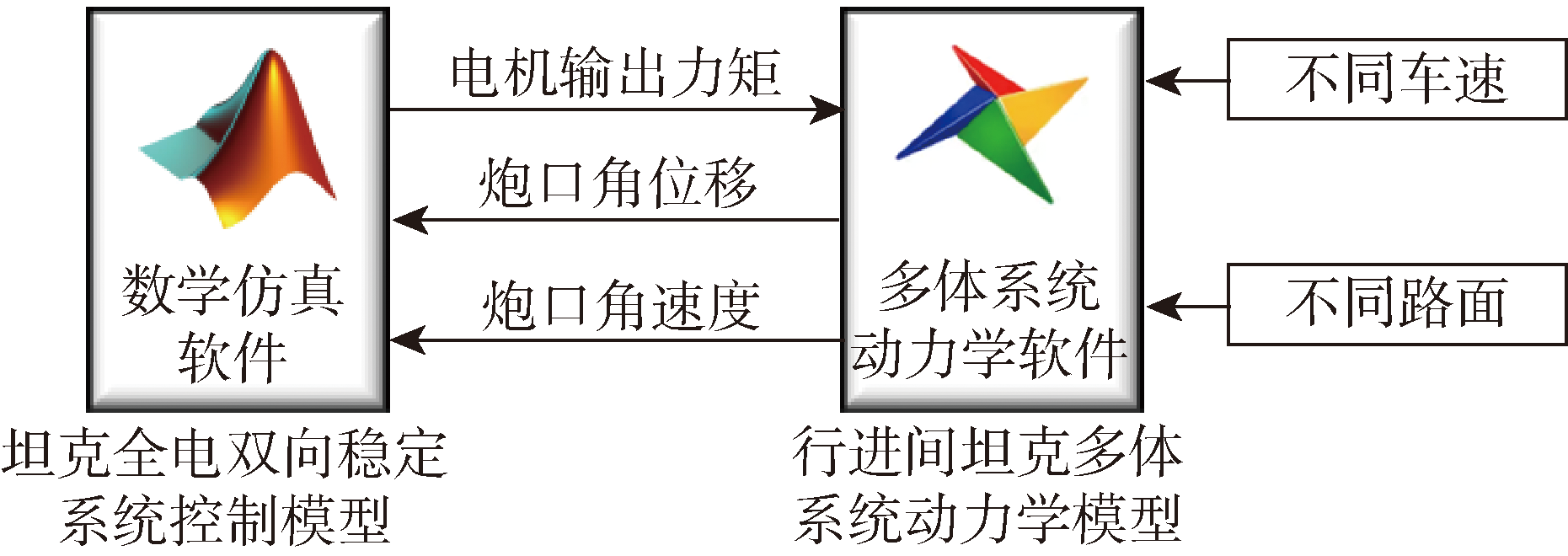
Fig.10 The principle of software interaction
| 参数 | 数值 |
|---|---|
| 水平向旋转体旋转半径h1/m | 0.20 |
| 垂直向旋转体旋转半径h2/m | 0.12 |
| 水平向旋转体总质量m1/kg | 5200.0 |
| 垂直向旋转体总质量m2/kg | 2088.0 |
| 电动缸上支点至耳轴中心距离d1/m | 0.44 |
| 电动缸下支点至耳轴中心距离d2/m | 0.30 |
| 零度射角下电动缸长度d/m | 0.40 |
| 零度射角下电动缸安装角度α0/rad | 1.07 |
| 炮塔电机力矩系数k1/(N·m·A-1) | 1.89 |
| 电动缸电机力矩系数k2/(N·m·A-1) | 1.54 |
| 水平向传动系数N1 | 400 |
| 垂直向传动系数N2 | 5 |
| 垂直向传动效率η | 0.98 |
| 重力加速度g/(m·s-2) | 9.80 |
| 路面参考空间频率n0/m-1 | 0.1 |
| 路面频率指数w | 2 |
Table 1 Major physical parameters for co-simulation
| 参数 | 数值 |
|---|---|
| 水平向旋转体旋转半径h1/m | 0.20 |
| 垂直向旋转体旋转半径h2/m | 0.12 |
| 水平向旋转体总质量m1/kg | 5200.0 |
| 垂直向旋转体总质量m2/kg | 2088.0 |
| 电动缸上支点至耳轴中心距离d1/m | 0.44 |
| 电动缸下支点至耳轴中心距离d2/m | 0.30 |
| 零度射角下电动缸长度d/m | 0.40 |
| 零度射角下电动缸安装角度α0/rad | 1.07 |
| 炮塔电机力矩系数k1/(N·m·A-1) | 1.89 |
| 电动缸电机力矩系数k2/(N·m·A-1) | 1.54 |
| 水平向传动系数N1 | 400 |
| 垂直向传动系数N2 | 5 |
| 垂直向传动效率η | 0.98 |
| 重力加速度g/(m·s-2) | 9.80 |
| 路面参考空间频率n0/m-1 | 0.1 |
| 路面频率指数w | 2 |

Fig.11 Comparison of horizontal angular displacements of muzzle in co-simulation
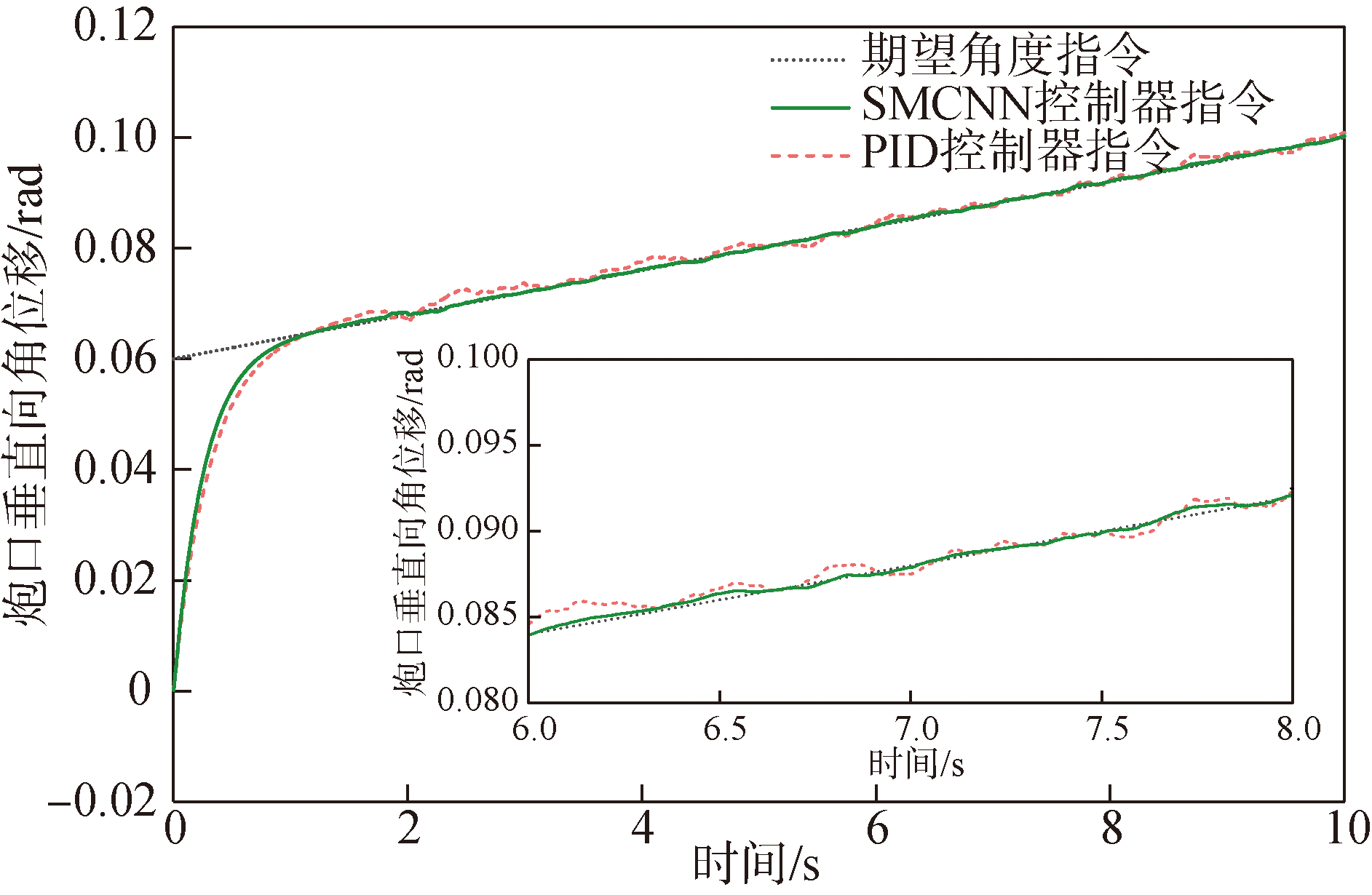
Fig.12 Comparison of vertical angular displacements of muzzle in co-simulation
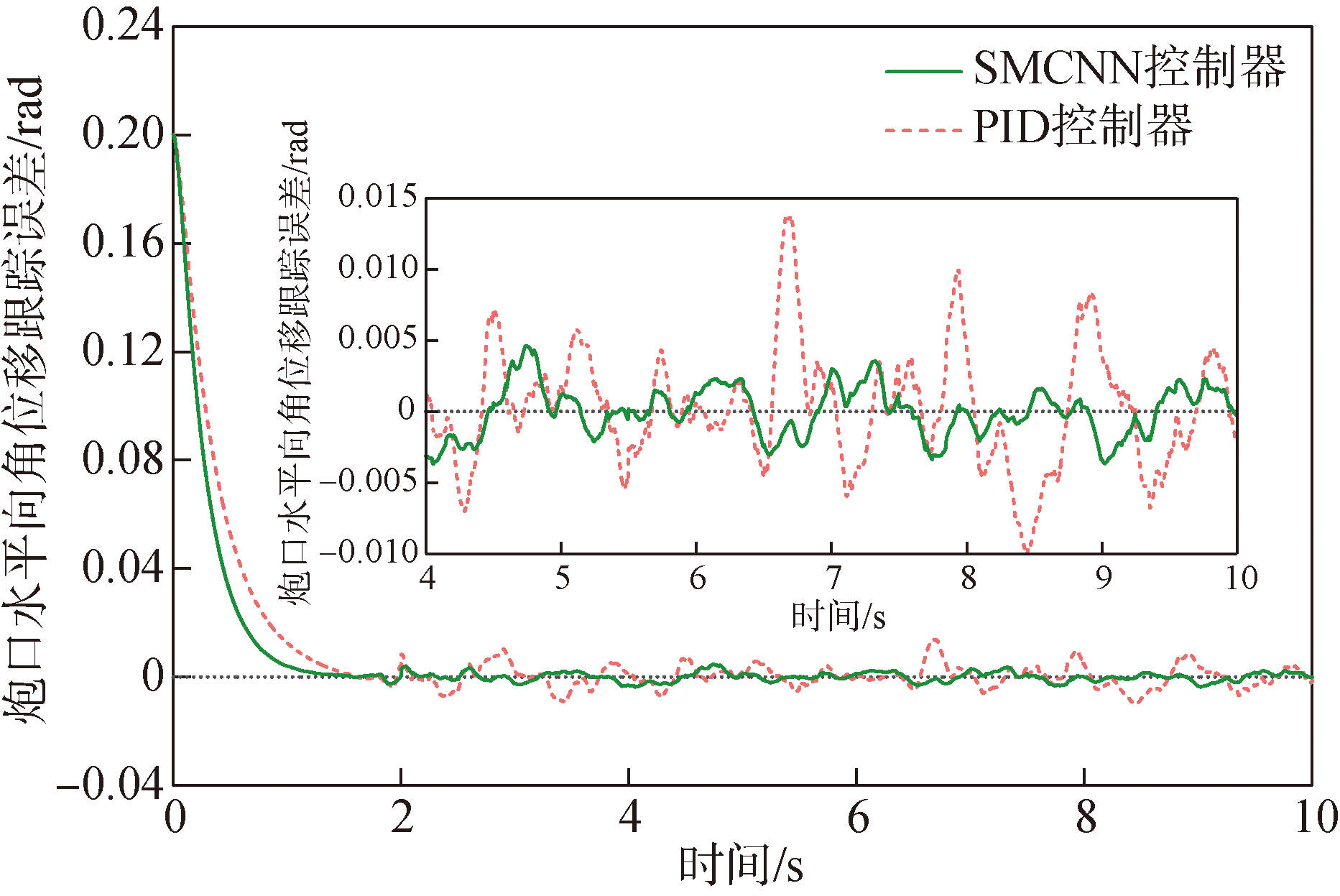
Fig.13 Comparison of horizontal angular displacement errors of muzzle in co-simulation

Fig.14 Comparison of vertical angular displacement errors of muzzle in co-simulation

Fig.15 Comparison of turret motor control currents in co-simulation

Fig.16 Comparison of electric cylinder motor control currents in co-simulation

Fig.17 Semi-physical platform of tank gun vertical stabilizer
| 参数 | 数值 |
|---|---|
| 垂直向旋转体旋转半径h2/m | 0.06 |
| 垂直向旋转体总质量m2/kg | 71.01 |
| 电动缸上支点至耳轴中心距离d1/m | 0.194 |
| 电动缸下支点至耳轴中心距离d2/m | 0.170 |
| 零度射角下电动缸长度d/m | 0.094 |
| 零度射角下电动缸安装角度α0/rad | 0.51 |
| 垂直向传动系数N2 | 36 |
| 垂直向传动效率η | 0.98 |
| 电动缸电机力矩系数k2/(N·m·A-1) | 0.195 |
| 重力加速度g/(m·s-2) | 9.80 |
Table 2 Major physical parameters for experiment
| 参数 | 数值 |
|---|---|
| 垂直向旋转体旋转半径h2/m | 0.06 |
| 垂直向旋转体总质量m2/kg | 71.01 |
| 电动缸上支点至耳轴中心距离d1/m | 0.194 |
| 电动缸下支点至耳轴中心距离d2/m | 0.170 |
| 零度射角下电动缸长度d/m | 0.094 |
| 零度射角下电动缸安装角度α0/rad | 0.51 |
| 垂直向传动系数N2 | 36 |
| 垂直向传动效率η | 0.98 |
| 电动缸电机力矩系数k2/(N·m·A-1) | 0.195 |
| 重力加速度g/(m·s-2) | 9.80 |

Fig.18 Tracking experimental result
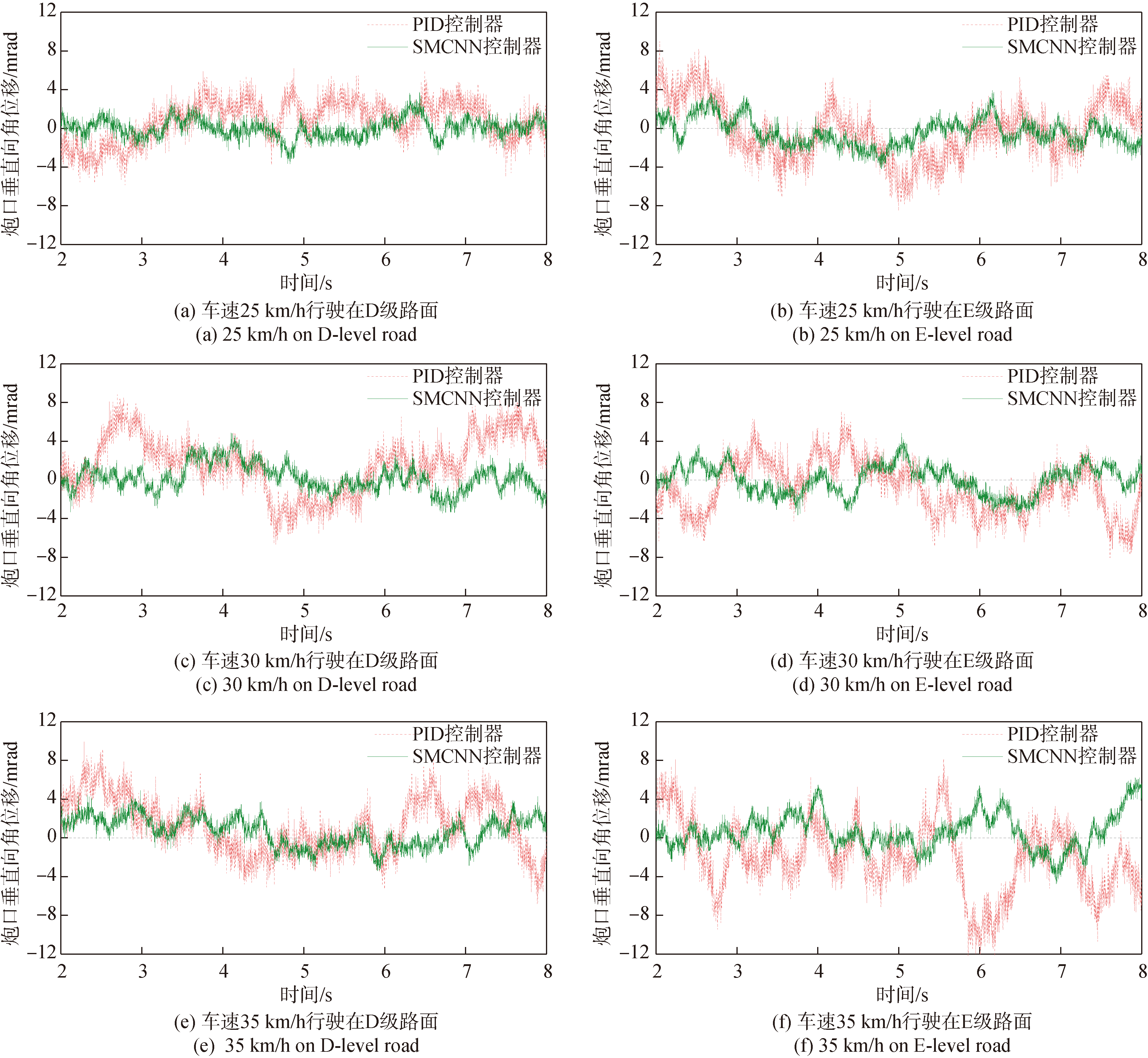
Fig.19 Anti-interference experimental results
| 控制器及降低百分比 | 车速/(km·h-1) | ||
|---|---|---|---|
| 25 | 30 | 35 | |
| PID控制器/mrad | 1.919 | 2.844 | 2.511 |
| SMCNN控制器/mrad | 0.942 | 1.296 | 1.618 |
| 降低百分比/% | 50.91 | 54.43 | 35.56 |
Table 3 Stabilization accuracy on D-level road
| 控制器及降低百分比 | 车速/(km·h-1) | ||
|---|---|---|---|
| 25 | 30 | 35 | |
| PID控制器/mrad | 1.919 | 2.844 | 2.511 |
| SMCNN控制器/mrad | 0.942 | 1.296 | 1.618 |
| 降低百分比/% | 50.91 | 54.43 | 35.56 |
| 控制器及降低百分比 | 车速/(km·h-1) | ||
|---|---|---|---|
| 25 | 30 | 35 | |
| PID控制器/mrad | 2.403 | 2.344 | 3.282 |
| SMCNN控制器/mrad | 1.429 | 1.465 | 2.232 |
| 降低百分比/ % | 40.53 | 37.50 | 31.99 |
Table 4 Stabilization accuracy on E-level road
| 控制器及降低百分比 | 车速/(km·h-1) | ||
|---|---|---|---|
| 25 | 30 | 35 | |
| PID控制器/mrad | 2.403 | 2.344 | 3.282 |
| SMCNN控制器/mrad | 1.429 | 1.465 | 2.232 |
| 降低百分比/ % | 40.53 | 37.50 | 31.99 |
| [1] |
|
| [2] |
|
| [3] |
李长兵, 袁东, 马晓军, 等. 高速机动条件下坦克火炮系统扰动力矩谱研究[J]. 兵工学报, 2015, 36(4):582-589.
doi: 10.3969/j.issn.1000-1093.2015.04.002 |
|
|
|
| [4] |
|
| [5] |
陈宇. 坦克行进间发射动力学分析及优化研究[D]. 南京: 南京理工大学, 2019.
|
|
|
|
| [6] |
陈宇, 杨国来, 付羽翀, 等. 高速机动条件下坦克行进间火炮非线性振动动力学研究[J]. 兵工学报, 2019, 40(7):1339-1348.
doi: 10.3969/j.issn.1000-1093.2019.07.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.07.002 |
|
| [7] |
|
| [8] |
王宗范, 杨国来. 计及不等式约束的坦克炮稳定系统约束跟随控制[J]. 南京理工大学学报, 2023, 47(4):461-467.
|
|
|
|
| [9] |
吕从鑫, 汪波, 陈静波, 等. 永磁同步电机控制策略综述与展望[J]. 电气传动自动化, 2022, 44(4):1-10.
|
|
|
|
| [10] |
马晓军, 袁东, 臧克茂, 等. 数字全电式坦克炮控系统研究现状与发展[J]. 兵工学报, 2012, 33(1):69-76.
|
|
|
|
| [11] |
孙国轩, 宫新宇, 时岩, 等. 基于差分进化算法的自行高炮随动系统PID参数整定[J]. 兵工学报, 2021, 42(5):903-912.
doi: 10.3969/j.issn.1000-1093.2021.05.002 |
|
doi: 10.3969/j.issn.1000-1093.2021.05.002 |
|
| [12] |
|
| [13] |
邱晓波, 窦丽华, 韩京清, 等. 自抗扰控制在坦克机动目标状态估计中的应用[J]. 兵工学报, 2009, 30(7):989-993.
|
|
|
|
| [14] |
|
| [15] |
代普, 潘军, 马晴, 等. 火炮俯仰电液伺服系统速度非线性抑制技术研究[J]. 兵工学报, 2022, 43(6):1246-1254.
doi: 10.12382/bgxb.2021.0357 |
|
doi: 10.12382/bgxb.2021.0357 |
|
| [16] |
|
| [17] |
高强, 侯润民, 杨国来, 等. 基于分数阶神经滑模的某顶置火炮调炮控制[J]. 兵工学报, 2013, 34(10):1311-1317.
doi: 10. 3969/ j. issn. 1000-1093. 2013. 10. 018 |
|
|
|
| [18] |
曾子健, 杨国来, 龙义强, 等. 基于自适应鲁棒控制的坦克俯仰系统建模与仿真[J]. 弹道学报, 2022, 34(2):41-46.
doi: 10.12115/j.issn.1004-499X(2022)02-006 |
|
doi: 10.12115/j.issn.1004-499X(2022)02-006 |
|
| [19] |
谢润. 车载武器行进间发射动力学研究[D]. 南京: 南京理工大学, 2015.
|
|
|
|
| [20] |
王经纬, 侯远龙, 高强, 等. 炮控系统电动负载模拟器神经网络滑模控制[J]. 兵工自动化, 2019, 38(4):62-65.
|
|
|
|
| [21] |
潘公宇. 汽车振动学基础及其应用[M]. 北京: 北京大学出版社, 2013:105-108.
|
|
|
|
| [22] |
袁树森, 邓文翔, 姚建勇, 等. 全电坦克双向稳定系统自适应积分鲁棒控制[J]. 兵工学报, 2023, 44(1):140-155.
doi: 10.12382/bgxb.2022.0107 |
|
doi: 10.12382/bgxb.2022.0107 |
| [1] | NING Jianguo, WANG Qi, LI Jianqiao. ANN-based Prediction Model for the Initial Velocity of Fragments in a Triangular Prism Directional Charge Structure [J]. Acta Armamentarii, 2025, 46(3): 240346-. |
| [2] | LI Yingshun, YU Ang, LI Mao, HE Zhe, LIU Shiming. Fault Diagnosis of Armored Vehicle Engine Based on KLDA-IDBO-BP [J]. Acta Armamentarii, 2025, 46(3): 240083-. |
| [3] | SU Zhengyu, YANG Baosheng, YANG Jing, TANG Jingnan, JIANG Yi, DENG Yueguang. A CNN-SVM-based Adapter Drop Point Prediction Algorithm [J]. Acta Armamentarii, 2025, 46(2): 240016-. |
| [4] | LIU Kunlong, WANG Hu, LIU Xiaoqiang, NIU Shuaixu, HUANG Yi, FU Qi, ZHAO Tao. Illumination Perception and Feature Enhancement Network for RGB-T Semantic Segmentation [J]. Acta Armamentarii, 2024, 45(S1): 219-230. |
| [5] | WANG Yeru, YANG Geng, LIU Shu, XU Xiao, CHEN Huajie, QIN Feiwei, XU Huajie. GCN-based Detection of Occluded Key Parts of Vehicle Target [J]. Acta Armamentarii, 2024, 45(S1): 242-251. |
| [6] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [7] | XIA Huanxiong, LI Kang, GAO Feng, LIU Jianhua, AO Xiaohui. Intelligent Optimization for Forming Quality of Melt-cast Explosives Based on the Evolution Characteristics of Solidification Front [J]. Acta Armamentarii, 2024, 45(9): 2936-2950. |
| [8] | DU Fu, DONG Mingming, WANG Hujiang, ZHAO Yanhui, ZHENG Fengjie. Semi-active Inertial Suspension Control Strategy for Tanks and Armored Vehicles Based on Quasi-zero.pngfness [J]. Acta Armamentarii, 2024, 45(9): 2929-2935. |
| [9] | YUAN Hongwei, LI Haojie, DAI Keren, CHEN Hejuan, ZHANG He. Parameter Optimization Method of Fuzd Setting System Based on Harris Hawks Optimization Algorithm [J]. Acta Armamentarii, 2024, 45(8): 2594-2606. |
| [10] | PANG Hui, WANG Mingxiang, WANG Lei, ZHENG Lizhe. Design of Event Trigger-based Vibration Control for Active Suspension System [J]. Acta Armamentarii, 2024, 45(8): 2698-2711. |
| [11] | LU Hang, LIU Haoran, CHEN Tairan, HUANG Biao, WANG Guoyu, CHEN Huiyan. Experimental and Numerical Study on Navigation Characteristics of Waterjet Propulsion Amphibian Vehicle [J]. Acta Armamentarii, 2024, 45(8): 2629-2645. |
| [12] | GUO Aiqiang, LI Tianpeng, ZHU Xi, GUAN Zhichao, LI Men, DONG Hongyu, GAO Xinbao. Smoke Screen Video Detection and Parameter Extraction Based on Convolutional Neural Network and Spatio-temporal Features [J]. Acta Armamentarii, 2024, 45(8): 2478-2486. |
| [13] | LIN Yubin, HOU Baolin, BAO Dan, ZHAO Wei. Implicit Lyapunov Function-based Variable Gain Super-twisting Sliding Mode Control of an Ammunition Transfer Manipulator [J]. Acta Armamentarii, 2024, 45(8): 2573-2583. |
| [14] | YUE Wenbin, NING Gongtao, NI Yongliang, SONG Keling, HUANG Yu, WANG Zhiyuan, LI Yanming. Collaborative Optimization and Security Control of Source-grid-load-storage of Tank and Armored Vehicle Power System: Architecture Design and Frontier Thinking [J]. Acta Armamentarii, 2024, 45(8): 2463-2477. |
| [15] | LIU Yali, LU Yanchi, MA Xunju, SONG Qiuzhi. Surface Electromyography-based Human Motion Pattern Recognition Using Convolutional Neural Networks [J]. Acta Armamentarii, 2024, 45(7): 2144-2158. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||